wykład 5
Ruch obrotowy ciała sztywnego
Równanie toru punktu s = r φ(t) (56)
an
Ao
r
φ at
A π φ
Rys.38 Ruch obrotowy wokół stałej osi
(57)
![]()
(a)
α
Ao
A
at
Rys.39 Składowe przyśpieszenia
Przykład 11
Na końcu A nierozciągliwej liny nawiniętej na bęben,
który może obracać się wokół poziomej osi, został przywiązany ciężar (rys.40). Ciężar ten zaczął opadać pionowo w dół ze stałym przyśpieszeniem liniowym o wartości ao. Należy wyznaczyć prędkość kątową i przyśpieszenie kątowe bębna w dowolnej chwili oraz prędkość i przyśpieszenie liniowe punktu leżącego na obwodzie bębna. Promień zewnętrzny bębna równy jest r.
Rozwiązanie B
ds
dφ r
x A
dx
Rys.40 A1
Przyśpieszenie punktu A 
(b)
całkując (b) stronami otrzymamy:

![]()
(c)
Prędkość punktu B 
(d)
Prędkość punktu A jest identyczna jak punktu B, z (c) i (d)
mamy 
Korzystając ze wzorów (57) mamy:
, 
, 
Przykład 12
Przyśpieszenie kątowe ε ciała poruszającego się ruchem obrotowym wyrażone jest w zależności od czasu t jako
![]()
przy czym εo i α oznaczają stałe. W chwili t = 0
prędkość kątowa ciała była równa zeru. Należy wyznaczyć prędkość kątową ciała ω jako funkcję czasu t.
Rozwiązanie

![]()
![]()

(e)
dla t = 0 ω = 0 wstawiając to do (e) otrzymujemy

(f)
po podstawieniu (f) do (e) mamy, że 
Przykład 13
Na rysunku 41 przedstawiono przekładnię zębatą. Dane:
ω1 = 20 rad/s, r1 = 20 cm, r2 = 10 cm. Określić wartość ω2 =?
Rozwiązanie A
ω1 ω2
VA1 VA2
Punkt A jest wspólny dla koła nr.1 i dla koła nr.2 stąd wniosek, że prędkość VA1 musi równać się prędkości VA2
a ponieważ VA1 = ω1r1 i VA2 = ω2r2 stąd ω1r1 = ω2r2
czyli: 
Ruch złożony punktu
Prędkość i przyśpieszenie punktu w ruchu złożonym
ruch bezwzględny ruch względem układu nieruchomego
ruch względny ruch względem układu ruchomego
ruch unoszenia ruch układu ruchomego względem
układu nieruchomego
z l
Z ek ω
y
0 ej
ei r
ro M
k rM
0' x
s i j Y
X Rys.42 ei , ej , ek , i, j, k wersory
0'XYZ układ nieruchomy
0xyz układ ruchomy układ unoszenia
![]()
(g)
gdzie ![]()
; ![]()
(h)
Prędkość bezwzględna punktu M

(i)
gdzie:
![]()
jest prędkością unoszenia w ruchu postępowym
okładu ruchomego 0xyz względem układu
nieruchomego.

(j)
Vw = w Vuob
W równaniu (j) pierwsze trzy składniki = Vw = w, są
prędkością względną, natomiast trzy ostatnie = Vuob są
składową prędkości unoszenia w ruchu obrotowym.
Ponieważ pochodne wersorów ei, ej, ek osi układu ruchomego 0xyz,
obracają się względem osi l z prędkością kątową ω, to pochodne te są równe: 
; 
; 
(k)
wstawiając (k) do (j) otrzymujemy:

(l)
Po podstawieniu (l) do (i) otrzymujemy wzór na prędkość
bezwzględną punktu M w ruchu złożonym
![]()
(58)
gdzie:
![]()
(59)
Prędkość bezwzględna punktu M w ruchu złożonym jest
wypadkową prędkości unoszenia u i prędkości względnej w
Przyśpieszenie punktu w ruchu złożonym

(m)

jest składową przyśpieszenia
unoszenia w ruchu postępowym układu ruchomego 0xyz

jest składową styczną przyśpieszenia
unoszenia w ruchu obrotowym układu ruchomego
Po uwzględnieniu (l)

![]()
składowa normalna przyśpieszenia unoszenia
w ruchu obrotowym układu ruchomego.
Rozwinięcie ostatniego wyrazu wzoru (m) uwzględniając (j) mamy 

(n)
aw
aw przyśpieszenie względne; ![]()
Podstawiając otrzymane wyrażenia do (m), przyśpieszenie
punktu M ma postać:
![]()
(61)
au ac
![]()
przyśpieszenie unoszenia (62)
![]()
![]()
przyśpieszenie Coriolisa (63)
Po wstawieniu (62) i (63) do (61) otrzymujemy
![]()
(64)
Przyśpieszenie bezwzględne aM punktu M w ruchu
złożonym równa się sumie wektorowej przyśpieszeń
unoszenia au , przyśpieszenia względnego aw i
przyśpieszenia Coriolisa ac .
Przykład 14 Sześcian o boku l = 11cm obraca się wokół przekątnej ściany bocznej BCG0 z prędkością kątową
ω = 12rad/s. Punkt M porusza się po okręgu wpisanym
w ścianę czołową AB0E z prędkością względną w = 2,2m/s.
Obliczyć prędkość bezwzględną VM i przyśpieszenie bezwzględne aM gdy punkt M znajduje się w położeniu N.
B z
D C
ω
A
Mt=0 x
G
y ωx
E w N r 0 Rys.43
![]()
; ![]()
![]()
![]()
; ![]()
; ![]()
Prędkość unoszenia w ruchu postępowym V0 = 0
Prędkość unoszenia u punktu M; ![]()

Prędkość względna w punktu M
![]()
Zgodnie ze wzorem (58)mamy ![]()
VMx i VMy j VMy k
Wartość prędkości bezwzględnej punktu M

Przyśpieszenie bezwzględne aM punktu M obliczamy korzystając ze wzorów (61), (62), (63) i (64)
Składowe przyśpieszenia punktu w ruchu unoszenia
wynoszą: a0 = 0, aut = 0 bo ε = 0
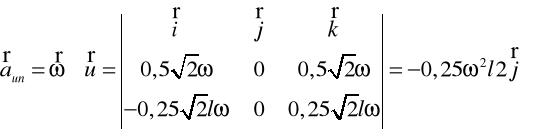
Przyśpieszenie punktu w ruchu względnym jest równe składowej normalnej w ruchu po okręgu ze stałą prędkością względną w = 2.2m/s, dlatego awt = 0![]()

Przyśpieszenia Coriolisa
Wektor przyśpieszenia bezwzględnego punktu M

aMxi aMyj aMzk
Wartość przyśpieszenia bezwzględnego punktu M
![]()

31kin
32kin
33kin
34kin
35kin
36kin
37kin
38kin
πo
an
a
r1
r2
aw
Wyszukiwarka
Podobne podstrony:
Bryla2, Studia, Sem 3, 01.SEMESTRIII Maja, mechanika ogólna, dynamika
ppa, Studia, Sem 3, 01.SEMESTRIII Maja, podstawy projektowania architekt
wlasciwosci-fizyczne-i-chemiczne-wody, Studia, Sem 3, 01.SEMESTRIII Maja, hydraulika i hydrologia
Teoria - skrót, Studia, Sem 3, 01.SEMESTRIII Maja, hydraulika i hydrologia, Hydrologia, deaktualne
woda zyciodajna substancja, Studia, Sem 3, 01.SEMESTRIII Maja, hydraulika i hydrologia
Teoria - skrót1, Studia, Sem 3, 01.SEMESTRIII Maja, hydraulika i hydrologia, Hydrologia
pyt na EGZAMIN -Budownictwo, Studia, Sem 3, 01.SEMESTRIII Maja, budownictwo ogólne, budownictwo, eg
Kolokwium wykładowe kinematyka, Studia, Sem 3, III, III Semestr, Mechanika II
Kopia Mechanika[1].wyklady, Studia, Sem 1,2 +nowe, Semestr1, 2 semestr, mechanika
Harmonogram ETI, Studia Politechnika Wydział Mechaniczny, studia, Sem III, SEMESTR III, płyny, labor
PLASKIE UKLADY SIL, Studia, Budownictwo Ladowe i Wodne, Semestr II, Mechanika ogolna
SILY WEWNETRZNE, Studia, Budownictwo Ladowe i Wodne, Semestr II, Mechanika ogolna
teczka, Studia, Sem 1,2 +nowe, Semestr1, 2 semestr, nieogarniete
18P, Politechnika Lubelska, Studia, Studia, sem VI, semestr 6, napędy elektryczne
więcej podobnych podstron