Dynamika ruchu obrotowego ciała sztywnego
• Każde ciało możemy uważać za układ n punktów materialnych, których suma mas równa się całkowitej masie ![]()
ciała:
• Ciało doskonale sztywne to takie ciało, w którym odległości między dwoma dowolnymi jego punktami materialnymi nie zmieniają się w trakcie ruchu (dalej nazwiemy je ciałem sztywnym lub bryłą sztywną).
• Rozważmy ruch ciała sztywnego wokół punktu O, zwanego środkiem obrotu ciała. Umieśćmy w tym punkcie początek układu współrzędnych. Niech ![]()
oznacza siłę, z jaką k-ty punkt działa na punkt i-ty (siły wewnętrzne) a ![]()
wypadkową wszystkich sił zewnętrznych, przyłożonych do punktu i-tego.
Ruch obrotowy ciała sztywnego - c.d.1
• II zasada dynamiki Newtona dla i-tego punktu:
• Mnożymy powyższe równanie stronami wektorowo przez ![]()
:

Pochodną względem czasu z lewej strony równania możemy wyłączyć przed znak iloczynu wektorowego (dlaczego!? - ćwiczenia rachunkowe):
![]()
nazywamy momentem pędu (krętem) punktu materialnego i względem osi O.
• Moment siły ![]()
względem punktu O:
![]()
Ruch obrotowy ciała sztywnego - c.d.2
• Używając opisanej symboliki, możemy zapisać nasze równanie jako:
• Dodajemy stronami równania wszystkich punktów materialnych ciała:


- ![]()
to moment pędu ciała względem punktu O.
- to moment główny sił zewnętrznych (wypadkowy)
(dlaczego?! - ćwiczenia rachunkowe)
Ruch obrotowy ciała sztywnego - c.d.3
• Ostatecznie: 
Szybkość zmiany momentu pędu ciała obracającego się dookoła nieruchomego punktu równa się wypadkowemu momentowi (względem tego punktu) wszystkich sił zewnętrznych, przyłożonych do ciała - zasada dynamiki ruchu obrotowego ciała zamocowanego w jednym, nieruchomym punkcie.
• Przypomnijmy definicję momentu pędu punktu materialnego:
![]()
i porównajmy ją z definicją momentu siły:
![]()
czyli: „moment” oznacza (matematycznie) mnożenie lewostronne przez wektor położenia (promień wodzący) ![]()
.
Ruch obrotowy ciała sztywnego - c.d.4
• Załóżmy teraz, że ciało sztywne umocowane jest w dwóch punktach tak, że może obracać się wokół nieruchomej osi przechodzącej przez te punkty - przyjmijmy, że jest to oś „z”. Wtedy składowe „x” i „y” momentu siły ![]()
są zrównoważone przez siły reakcji zamocowania, a obrót wokół osi „z” odbywa się pod działaniem składowej ![]()
momentu sił zewnętrznych:
Szybkość zmiany momentu pędu ciała względem nieruchomej osi obrotu równa się wypadkowemu momentowi (względem tej osi) sił zewnętrznych działających na ciało.
Ruch obrotowy ciała sztywnego - c.d.5
• Całkowity moment pędu ciała względem osi „z” jest równy sumie momentów pędu każdego punktu materialnego:
![]()
wobec tego całkowity moment pędu ciała: 
Zasada dynamiki ruchu obrotowego
• Wielkość: 
nazywamy momentem bezwładności ciała względem osi „z”.
• W przypadku granicznym ciała „rozciągłego” sumowanie zastępujemy całkowaniem:

• Ostatecznie otrzymujemy związek między momentem pędu ciała i prędkością kątową obrotu:
![]()
• Wykorzystanie związku: 
pozwala na wyrażenie podstawowej zasady dynamiki ruchu obrotowego:
Zasada dynamiki ruchu obrotowego - c.d.

Przyspieszenie kątowe ciała sztywnego obracającego się wokół nieruchomej osi jest wprost proporcjonalne do wypadkowego momentu (względem tej osi) wszystkich sił zewnętrznych działających na ciało i odwrotnie proporcjonalny do momentu bezwładności ciała względem tej osi.
• Moment bezwładności jest więc miarą bezwładności ciała w ruchu obrotowym (analog masy jako miary bezwładności w ruchu postępowym).
• Przykładowe momenty bezwładności brył:
Ciało |
Położenie osi |
Moment bezwładności |
pusty cienkościenny walec o masie m i promieniu R |
oś symetrii |
|
pełny walec (tarcza) o masie m i promieniu R |
oś symetrii |
|
kula o masie m i promieniu R |
oś symetrii |
|
cienki pręt o masie m i długości L |
oś prostopadła do pręta, przechodzi przez jego środek |
|
Twierdzenie Steinera
(Twierdzenie o osiach równoległych)
• Załóżmy, że znamy moment bezwładności ciała względem pewnej osi obrotu, ale ciało obraca się względem innej osi, równoległej do niej:
Moment bezwładności ciała ![]()
względem dowolnej osi ![]()
równa się momentowi bezwładności ![]()
tego ciała względem innej, równoległej do niej osi ![]()
, powiększonemu o iloczyn masy tego ciała przez kwadrat odległości między tymi osiami:
![]()
Wniosek: Gdy środek masy ciała oddala się od osi obrotu, to moment bezwładności ciała względem tej osi wzrasta.
Zasada zachowania momentu pędu
• Z zasady dynamiki ruchu obrotowego:

wynika wprost:

Jeżeli wypadkowy moment sił zewnętrznych względem nieruchomego punktu ciała równa się zeru, to moment pędu ciała względem tego punktu nie zmienia się w czasie.
• Można pokazać, że również: moment pędu zamkniętego układu ciał względem dowolnego punktu nieruchomego jest stały.
• Podobnie: jeśli siły zewnętrzne dają moment względem nieruchomej osi równy zeru, to moment pędu ciała względem tej osi nie zmienia się podczas ruchu.
(pokazy: wahadło Oberbecka, żyroskop, stołeczek + hantle, koło rowerowe)
Tensor momentu bezwładności
• Rozważmy obrót ciała o dowolnym kształcie wokół osi przechodzącej przez początek układu współrzędnych.
Prędkość i-tego punktu względem początku układu: ![]()
Stąd wyrażenie na moment pędu całego ciała:

Skorzystamy z tożsamości wektorowej:
![]()
Podstawiając, otrzymujemy:
Wszystkie punkty mają tę samą prędkość kątową ![]()
, możemy więc zapisać powyższe równanie wektorowe jako układ trzech równań dla poszczególnych składowych ![]()
(tu tylko dla „x”):
Tensor momentu bezwładności - c.d.1
• Ponieważ: ![]()
otrzymujemy:

(sumowanie po i pominięte dla uproszczenia)
• Podobne równania możemy napisać dla składowych „y” i „z” i ostatecznie równanie, wiążące wektor momentu pędu ![]()
z pseudowektorem prędkości kątowej ![]()
, przyjmie postać:
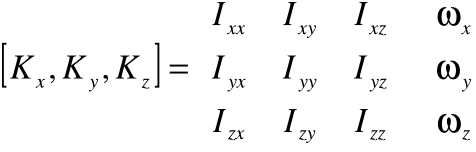
• Macierz z prawej strony równania to tensor bezwładności a jego elementy nazywamy współczynnikami bezwładności lub momentami bezwładności.
Tensor momentu bezwładności - c.d.1
• Wyraz przekątny (tu np. „x”):
![]()
jest sumą iloczynów każdej z mas cząstkowych przez kwadrat jej odległości od danej osi (tu „x”), więc możemy go nazwać momentem bezwładności względem tej osi.
• W przypadku ciągłego rozkładu masy z gęstością ![]()
współczynniki tensora możemy zapisać w postaci całek, na przykład:

• Tensor bezwładności jest symetryczny, to znaczy: ![]()
13
![]()
![]()
![]()
![]()
![]()
z
O
d
O
O'
i
j
![]()
m
Wyszukiwarka
Podobne podstrony:
11 Dynamika relatywistyczna, Politechnika Wrocławska Energetyka, I semestr, Fizyka 1.2, Wyklady fizy
propozycje, Politechnika Wrocławska Energetyka, I semestr, Fizyka 1.2, Wyklady fizyka, Wyklady fizyk
Program wykładów z fizyki, Politechnika Wrocławska Energetyka, I semestr, Fizyka 1.2
7 Nieinercjalne uklady odniesienia, Politechnika Wrocławska Energetyka, I semestr, Fizyka 1.2, Wykla
2 Wielkosci fizyczne, Politechnika Wrocławska Energetyka, I semestr, Fizyka 1.2, Wyklady fizyka, Wyk
13 Ruch falowy, Politechnika Wrocławska Energetyka, I semestr, Fizyka 1.2, Wyklady fizyka, Wyklady f
propozycje tematow, Politechnika Wrocławska Energetyka, I semestr, Fizyka 1.2
fiza, Politechnika Wrocławska Energetyka, I semestr, Fizyka 1.2
Zadania z fizyki1 nowa pomocnicza, Politechnika Wrocławska Energetyka, I semestr, Fizyka 1.2
Zadania z fizyki1, Politechnika Wrocławska Energetyka, I semestr, Fizyka 1.2, Wyklady fizyka, Wyklad
8 Energia praca moc, Politechnika Wrocławska Energetyka, I semestr, Fizyka 1.2, Wyklady fizyka, Wykl
III01 Dynamika ruchu obrotowego bryly sztywnej
2?DANIE DYNAMIKI RUCHU OBROTOWEGO BRYŁY SZTYWNEJ
07 Dynamika ruchu obrotowego bryly sztywnej, Domumenty
Dynamika ruchu obrotowego bryły sztywnej (2)
7 Dynamika ruchu obrotowego bryly sztywnej[2]
więcej podobnych podstron