1.Klasyfikacja i kryteria dokładności szczegółowych i pomiarowych osnów geodezyjnych. Osnowa pomiarowa: mp <= 0,1 m - w stosunku do najsłabiej wyznaczonego punktu względem osnowy wyższej klasy; mΔk<= 20 mm/km; mH<= 0,1 m dla najsłabszego pkt. w ciągach do pomiarów rzeźby terenu mp<= 0,5 m - dla najsłabszego punktu mH<= 0,15 m osnowa szczegółowa: II mp<=3-5 cm III mH<=4 mm/km III mp<=7-10cm IV mH<=10 mm/km
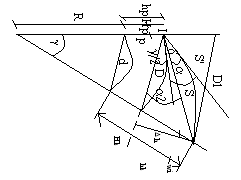
2a. Do rysunku kąt środkowy, kąt refrakcji: γ/2=d/2R; γ=d/R=scosα/R;; δ=S/2r=S/2R*k=Dm/2Rcosα*k
2b.Wyprowadzenie wzorów. Dane S,α: Δh=Ssinα+(s2cos2α)/2R*(1-k) z tw. Sinusów Δh/sinα2=S/sin(90o+γ/2); Δh=Ssinα2/sin(90o+γ/2)=Ssinα2/cos(γ/2)=Ssinα2; cos(γ/2)=1; α2=α-δ+γ/2; Δh= Ssin(α+(γ/2-δ)= Ssinαcos(γ/2-δ)- Scosαsin(γ/2-δ)= Ssinα+cosα(γ/2-δ)= Ssinα+cosα((Scosα/2R)-(S/2R*k))= Ssinα+S2cos2α/2R-(S2cosα/2R*k)= Ssinα+ S2cos2α/2R*(1-k) 2c. Kąt pionowy z uwzg bł indeksu koła pionowego M(bł. Ind koła pionowego)=(Op+Ol-400g)/2; α(wartość kąta pionowego)=(αl+αp)/2; α=(Op-Ol-200g)/2 Rl=Ol-M; Rp=Op-M =>wartość odczytów.
![]()
Dane d,α,D,α od przedostatniego= Dm2 a nie Dm w ułamkach aż do końca.

2d,e. różnice wysokości. Na podstawie S,α ΔHab.=Ssinαa+S2/2R*(1-k)-(s*sinα)2/2R+i-w; Na podstawie d,α ΔHab.=d(1+hm/R)tgαa+d2/2R*(1-k)-(s*sinα)2/2R+i-w;Pomiary synchroniczne: ΔHab.=d(1+hm/R)(tgαa-tgαb)/2+(ia+wa-ib-wb)/2; ΔHab.=(Sasinαa-Sbsinαb)/2+(ia+wa-ib-wb)/2 2f. Wpływ Zakrzywienie Ziemi (i) Współczynnik refrakcji na wynik pomiaru:
Δh(R)=S2cos2α/2R2(1-k)ΔR R<= 8 km Δh(k)=S2cos2α/2R2Δk Δk= 0,5
2g. Analiza dokładności pomiarów. Pozioma: mΔh2=(tgα*md)2+(d/cos2α*mα/δ)2+(d2/2R*mk)2+mi2+mw2 ; Skośna: mΔh2=(sinα*ms)2+(Scosα* mα/δ)2+(S2/2R*mk)2+mi2+mw2; Spozioma: mΔh2=((tgαa-tgαb)/2*md)2+d2/4*(1/cos4αa+1/cos4αb)(mα/δ)2+2mi2 ; sSkośna: mΔh2=((sinαa-sinαb)*ms)2+S4/4*(cos2αa+ cos2αb)*(mα/δ)2+2mi2
3. Sposoby wyznaczania wysokości pkt niedost. -bezpośredni pomiar jest nie możliwy:d1/sinβ2= d2/sinβ1=b/sin(β1+β2); d1=bsinβ2/sin(β1+β2); d2=bsinβ1/sin(β1+β2)
Hp'=O1+d1tgα1+d12/2R(1-k)1/cos2α1; -bezpośredni pomiar do pkt niedost x=(btgα2+O2-O1)/(tgα1-tgα2) H=xtgα1+O1+ x2/2R(1-k)1/cos2α1
4 Pomiar sytuacyjno-wysokościowe metoda tachimetryczną.tachimetria-(z gr. szybki pomiar) - jednocześnie możemy zmierzyć kierunek poziomy, kąt pionowy i odległość skośną.1. Zasady pomiaru:- założenie osnowy pomiarowej; - pomiar + obliczenie współrzędnych; - wykonanie obserwacji Katowych i liniowych do pkt terenowych w nawiązaniu do pkt. Osnowy w ukł. Globalnym; - wyznaczenie wspł. Pikiet; - kartowanie pikiet:kontrola; - utworzenie NMD i edycja wartości; - kontrolne pomiary i ocena dokładności wykonanej mapy.
5. Tachimetr kreskowy: l=g-d; l'=l”; l'=lcosα; k=(ctgε/2)/2; D'=(l'ctgε/2)/2+c; D'=kl'+c=klcosα+c; D=(klcosα+c)cosα= klcos2α+ ccosα=kl+c; Δh=klcos2α*sinα/cosα=(klsin2α)/2
6a. Tachimetry elektroniczne klasyfikacja: dwuobrazowe, autokoredukcyjne;
6c. Kompensator dwuosiowy. System kompensacyjny składa się ze źródła światła ( dioda luminescencyjna DL), ukł. optyczny ( pryzmat, soczewka), kompensator cieczowy ( KC) i fotodetektor FD. Światło z diody DL przechodzi przez przezroczyste dno kompensatora cieczowego KC, odbija się od powierzchni wypełniającej go cieczy i stąd rzucane jest na światłoczuła powietrznię FD. FD jest czterosekcyjnym fotodetektorem pozycyjnym i określa położenie punktu świetlnego względem krawędzi.
6d. oprogramowanie standardowe i funkcje specjalne - ustawienie parametrów pracy instrumentu ( jednostki, tryb pracy); - numeryczna rektyfikacja ( kolimacja , bł. miejsca zera); - eliminacja niektórych bł. Instrumentalnych ( bł. Wychylenia osi głównej instrumentu); - obliczenie odległości skośnej przewyższenia; - obliczenie przyrostu współ. W ukł. Stanowiska; - redukcje odległości ( poziom odniesienia i pow. odwzorowania); - wcięcia; - tyczenie ( metoda biegunowa, stanowiska); *rzut na prostą; * tyczenie ław fundamentalnych; - pomiar i obliczenie ciągu poligonowego; - obliczenie pola ze współ.; - pomiar ekscentryczny ( kierunek, odległości i płaszczyzny, wysokości)
8. Obliczenia tachimetryczne: Dziennik: liczymy dx i dy. Azymuty=tan(Dy/dx). Kąt poziomy α1(2)=Oαp-Oαn1(2) Kąt pionowy β=(100+M)-Ol v Op-(300+M).; Liczymy azymut każda droga A1010-21=A1010-1011+α1. Różnica azymutów. Aśr=(A1+A2)/2. Liczymy D=s*cosβ liczymy dh i H ze wzoru.
9. Sposoby pomiarów tachimetrycznych z kodowaniem 1. pomiar punktowy - każdemu pomierzonemu punktowi przypisujemy kod 2. pomiar obiektowy - wpisujemy kod obiektu i mierzymy po kolei wszystkie punkty tworzące obiekt. Obiekt od razu może się zaznaczać i tworzyć mapę.Jeżeli pomylimy się wpisując kod, to możemy to zmodyfikować.
11. Klasyczne i nowe rodzaje osnów tachimetrycznych Osnowa pomiarowa 1.Pozioma osnowa pomiarowa 2. Wysokościowa osnowa pomiarowa 3. Pomiarowa osnowa sytuacyjno - wysokościowa ( dwufunkcyjna osnowa pom.) Każda z tych osnów musi być dowiązana do osn. szczeg. lub podst. Dwufunkcyjna osnowa pomiarowa - ciągi tachimetryczne - osnowy modularne - osnowy mieszane - złożone z ciągów, usztywnione dodatkowymi wcięciami, punktami wyznaczonymi GPS - stanowiska wyznaczone metoda wcięć - swobodne stanowisko tachimetryczne - pkt. wcięte kątowo, liniowo, kątowo - liniowo Osnowy modularne blokowe Siec modularna jest zbiorem wzajemnie powiązanych konstrukcji geod. Zwanych modułami Δ - pkt. Nawiązania o - pkt wiążący , stanowisko instrumentu 11cd
11. cd- możliwość jednoczesnego pomiaru stanowisk i pikiet - mniej pkt. Osnowy - mniej pkt. wymaga stabilizacji - ujednolicenie i automatyzacja procesów obliczeniowych - zwiększenie dokładności opracowań - najlepsza dokładność przy 3 punktach lub 3 reperach nawiązania leżących na obrzeżach mierzonego obszaru - dst< 300m to mΔn< 1cm Stanowisko swobodne Konstrukcje pomiarową obliczoną w lokalnym ukł. stanowiska należy wpasować w ukł. współrzędnych punktów nawiązania metodą Transformacji Helmerta ( 3- parametrowa, bez zmiany skali). Dla punków nawiązania spełnione warunki: [ΔXi2] + [ΔYi2] = min [ΔH2] = min.
15. Kontrola sytuacyjna i wysokościowa mapy wielkoskalowej, ocena dokładności wykonanej mapy. 1. kontrola osnowy pomiarowej mp, mH <= 10 cm 2. kontrola sytuacyjna charakterystycznych punktów terenowych mp, mH <= 10 cm Pomiar powtórny niektórych pikiet; obs. Pikiet z innych stanowisk. Obliczamy rozbieżności z pomiaru kontrolnego: mp=pier.((dx2+dy2)/n); mH=pier.([dx2]/n) 3. kontrola wysokości charakterystycznych punktów terenowych 4.kontrola rzeźby terenu
12. 13. Zasady pomiaru szczegółów i rzeźby terenu. 1. Sprawdzenie błędu indeksu koła pionowego 2. Pomiar pikiet i charakterystycznych pkt. terenu z każdego stanowiska; pomiar musi być poprzedzony pomiarem dwóch kierunków nawiązanych, a po zakończeniu powtarzamy pomiar na jeden kierunków nawiązujących. Pełny pomiar ( odległość, kąt pionowy, kąt poziomy) Generalizacja szczegółów - prostowanie odcinków konturów sytuacyjnych w zależności od grupy dokładnościowej. - ogrodzenie mierzymy gdy jego szerokość przekracza 0,3 m (granica to zewnętrzna strona ogrodzenia) - występy, wgłębienia mniejsze od 2 m wyznaczamy miara bieżącą po obiekcie - szczegóły w obrębie pasa drogowego mierzymy metoda przekrojów poprzecznych do osi drogi - kontury uzbrojenia > 0,5 m mierzymy w sposób umożliwiający ich prawidłowe skartowanie < 0,5 m stajemy na środku i mierzymy. Generalizacja rzeźby terenu: Pikiety rozmieszczamy: - szczyty siodła, najniższe miejsca form terenu - górne i dolne krawędzie zbocza - miejsca załamania profilu - miejsca powstałe w wyniku działalności gospodarczej człowieka ( nasypy, wykopy), pikiety rozmieszczamy na krawędziach płaszczyzn - górne i dolne krawędzie skarp, pkt. załamania i zakończenia skarp - wloty i wyloty przepustów - punkty charakterystyczne przekrojów poprzecznych cieków.
14. Treść, skale bazowe, zasadnicze ciecie warstwicowe i forma mapy zasadniczej. Metryka mapy zasadniczej. Mapa zasadnicza - wielkoskalowe pracowanie kartograficzne zawierające aktualne informacje o przestrzennym rozmieszczeniu obiektów ogólno geograficznych oraz o elementach ewidencji gruntów i budynków a także sieci uzbrojenia terenu: - nadziemnych, - naziemnych, - podziemnych.Treść mapy: - obligatoryjna (punkty osnów geod., elementy ew. gruntów i budynków, elementy sieci uzbrojenia terenu) - fakultatywna ( wewnętrzne ulice, wszystko co jest w pasie drogowym, ścieszki, drzewa) Treść mapy zasadniczej powinna być możliwa do przedstawienia w systemie nakładek tematycznych: E - nakładka ewidencji gruntów i budynków U - nakładka sieci uzbrojenia terenu S - nakładka sytuacji powierzchniowej W - nakładka rzeźby terenu R - nakładka realizacyjnych uzgodnień projektowych Skale mapy zasadniczej Kryteria: - stopień zagęszczenia terenu - przewidywane zamierzenie inwestycyjne 1:500 - intensywna zabudowa 1:1000 - tereny małych miast, aglomeracji miejskich, osiedli wiejskich, będące siedzibami gmin 1:2000 - tereny rolne o drobnej, nieregularnej zabudowie 1:5000 - grunty rolne, leśne na terenie gmin; tereny o rozproszonej zabudowie wiejskiej.cd14
cd14Zasadnicze cięcie warstwicowe zależy od skali mapy i od stopnia ukształtowania terenu: 1:500 - 0,5 m ( dla terenów górskich 1m) 1:1000 - 1m 1:2000 - 2,5m 1:5000 - 5m Wprowadza się warstwice pomocnicze dla płaskich terenów (połowa zasadniczego ciecia) Metryka mapy zasadniczej - podstawowy dokument obrazujący przebieg opracowania mapy z podaniem źródeł inf. o cechach mapy i jej aktualności. Zawiera: - skale mapy, układ. wsp. -dane o sekcji mapy - godło, nr. strefy, poprawkę liniową, powierzchniową, cięcie warstwicowe - dane o wykonawcach - dane o osn. geod. - dane o wykorzystanych materiałach i ich jakości - informacje o jakości mapy
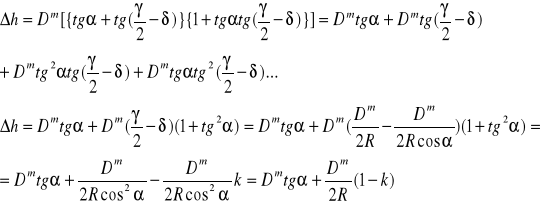
7. Redukcje poziom dalmierza(ostatnie = ułamek S2sin2α/2R); poziom lustra(pierwsze Dw=Ssin; S a nie r r/2R; ostatnie = bez Ssinα)

![]()

Wyszukiwarka
Podobne podstrony:
GPS - egzamin - ściąga, gik, semestr 4, GPS, GPS, Gps sciaga
Ćwiczenie 2 GPS, gik, semestr 5, GPS 3
Tabelka GPS, gik, semestr 5, GPS 3
Wyrównanie Wojtek, gik, semestr 5, GPS 3
GPS Vector data(2), gik, semestr 4, satelitarna, Satka, Geodezja Satelitarna, Kozowy folder
projekt sieci, gik, semestr 4, satelitarna, Satka, Geodezja Satelitarna, siec gps II klasy
GPS Vector data(2), gik, semestr 4, satelitarna, Satka, Geodezja Satelitarna, Kozowy folder
sciąga moja, Informatyka SGGW, Semestr 4, Inżynieria oprogramowania, Od starszego rocznika
sciaga 1 kolos, gik, semestr 4, satelitarna, Satka, Satelitarna
sciaga na elektre moja, Politechnika Poznanska, SEMESTR 1, Teoria obwodów, wykłady, Teoria Obwodów,
Sciaga gedezja sprawdzian nr.2, gik, semestr 4, Wyższa, GW
Sciaga Kolos I, gik, semestr 4, Wyższa, kolo1
ŚCIĄGA NA EGZAMIN, gik, semestr 4, kartografia, Kartografia1
sciaga moja wlasna, PWR, semestr I, technologia informacyjna
Kartografia matematyczna - sciaga egzamin, gik, semestr 5, Kartografia Topograficzna, KTP, kartograf
sciąga moja, Informatyka SGGW, Semestr 4, Inżynieria oprogramowania, Od starszego rocznika
więcej podobnych podstron