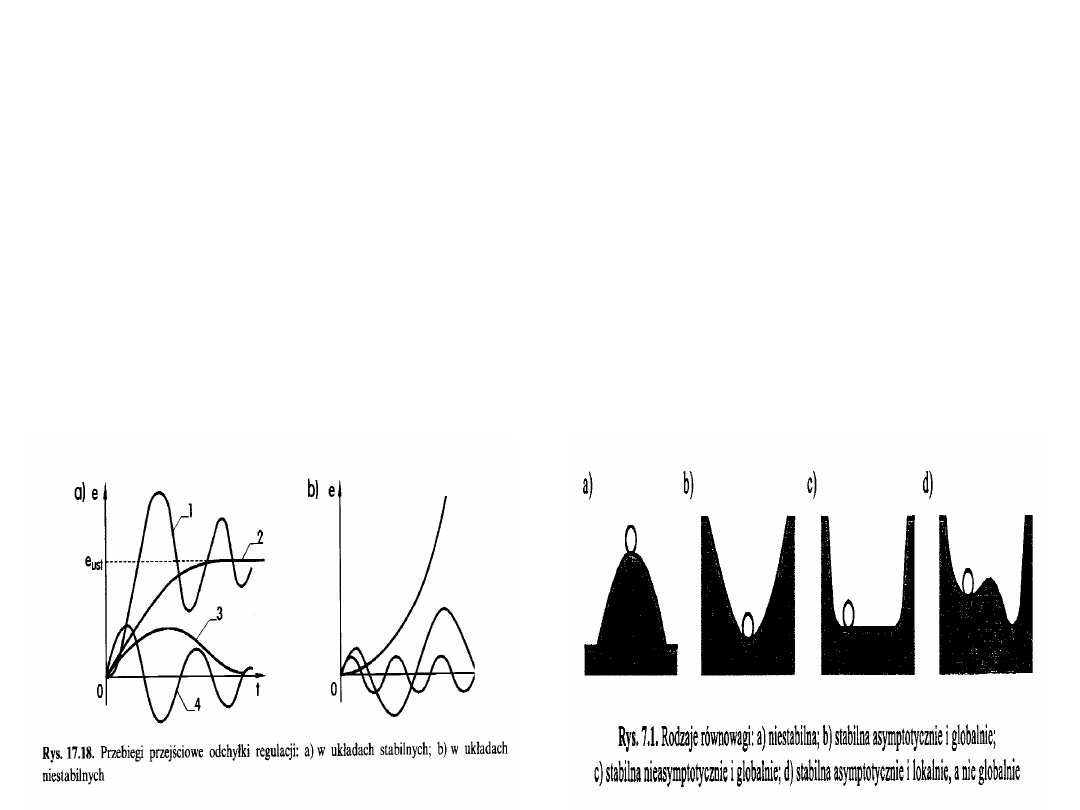
Stabilność układów
automatyki
Stabilność
Stabilność
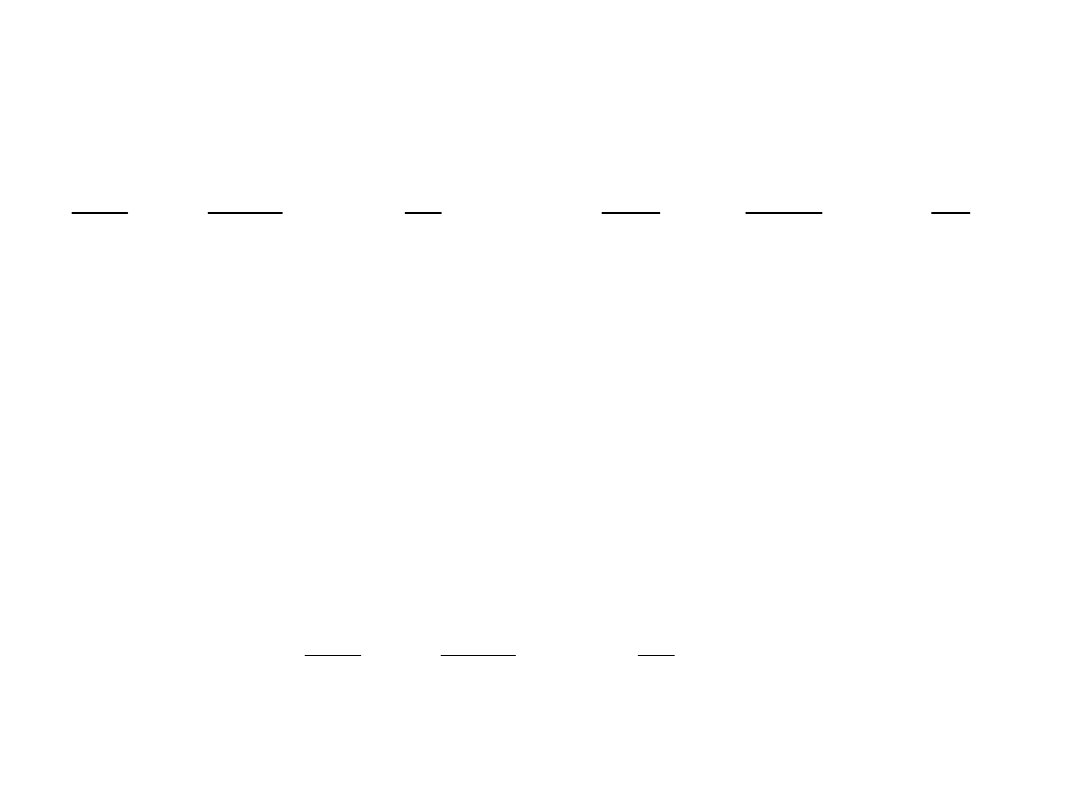
układu jest cechą polegającą na
układu jest cechą polegającą na
samoczynnym powracaniu do stanu trwałej
samoczynnym powracaniu do stanu trwałej
równowagi po ustaniu działania zakłócenia,
równowagi po ustaniu działania zakłócenia,
które wytrąciło układ z tego stanu.
które wytrąciło układ z tego stanu.
Układ jest
Układ jest
stabilny asymptotycznie
stabilny asymptotycznie
, gdy po
, gdy po
zaniku zakłócenia układ powraca do tego
zaniku zakłócenia układ powraca do tego
samego stanu równowagi co zajmowany
samego stanu równowagi co zajmowany
poprzednio.
poprzednio.
Stabilność układów
automatyki
Analityczne sformułowanie warunków stabilności
Analityczne sformułowanie warunków stabilności
Należy więc zbadać rozwiązanie ogólne równania różniczkowego
jednorodnego
u
b
dt
du
b
dt
u
d
b
dt
u
d
dt
dy
dt
y
d
dt
y
d
m
m
m
m
m
n
n
n
n
0
1
1
1
1
m
0
1
1
1
1
-
n
n
...
b
y
a
+
a
+
...
+
a
a
0
y
a
+
a
+
...
+
a
a
0
1
1
1
1
-
n
n
dt
dy
dt
y
d
dt
y
d
n
n
n
n
Rozwiązanie jest suma dwóch rozwiązań:
Rozwiązanie jest suma dwóch rozwiązań:
Ogólnego y
Ogólnego y
0
0
(t)
(t)
Szczególnego y
Szczególnego y
s
s
(t)
(t)
Układ będzie stabilny gdy
Układ będzie stabilny gdy
0
)
(
lim
0
t
y
t
0
a
+
a
+
...
+
a
a
0
1
1
1
-
n
n
s
s
s
n
n
Równanie
charakterystyczne
Stabilność układów
automatyki
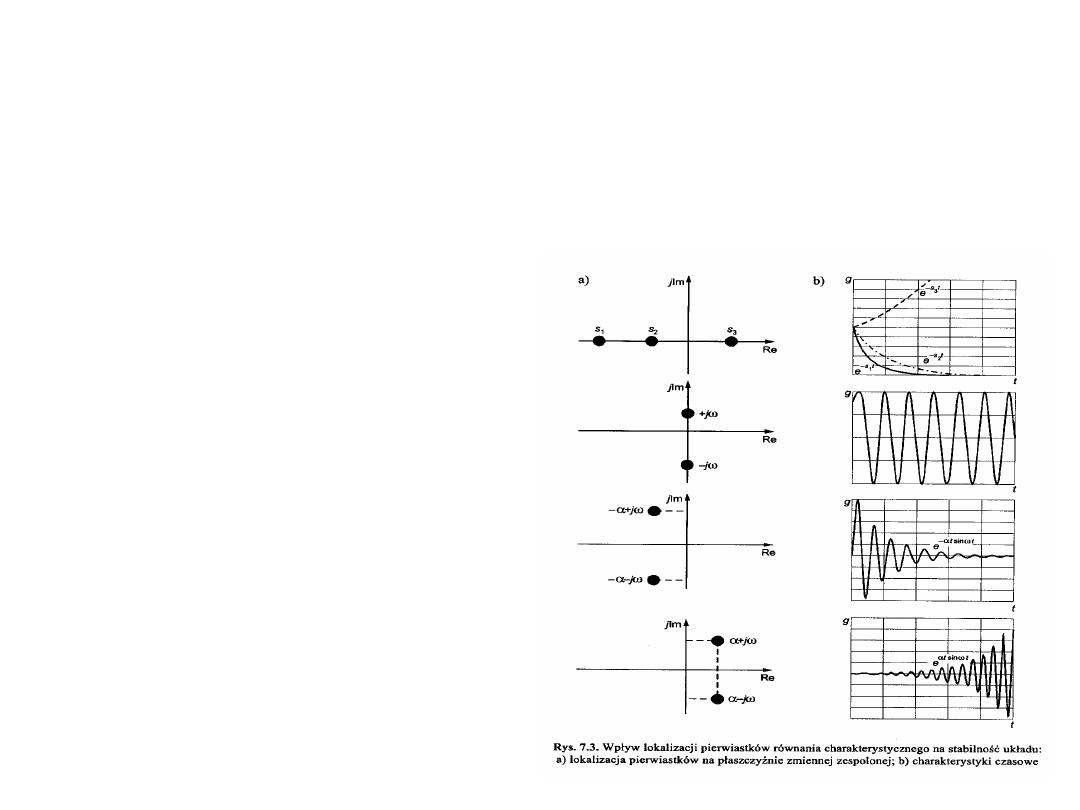
Pierwiastki równania charakterystycznego mogą przybierać
Pierwiastki równania charakterystycznego mogą przybierać
wartości: zerowe, rzeczywiste dodatnie lub ujemne, zespolone z
wartości: zerowe, rzeczywiste dodatnie lub ujemne, zespolone z
częścią rzeczywistą dodatnią, zerową lub ujemną
częścią rzeczywistą dodatnią, zerową lub ujemną
t
s
t
s
t
s
n
e
C
e
C
e
n
2
1
0
+
...
+
C
(t)
y
2
1
)
sin
cos
(
)
sin
cos
(
(t)
y
2
4
2
3
1
2
1
1
0
2
1
t
A
t
A
e
t
A
t
A
e
t
s
t
s
Stabilność układów
automatyki
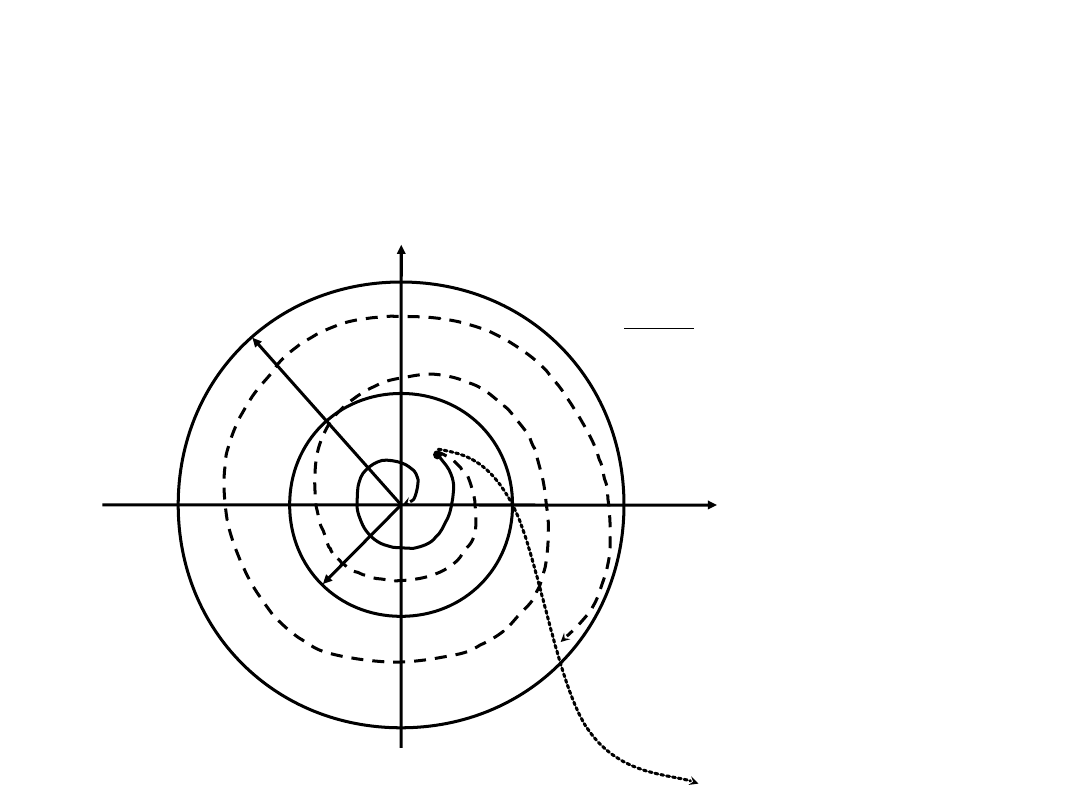
Definicja stabilności w sensie Lapunova
Definicja stabilności w sensie Lapunova
η
ε
x=0
x
1
x
2
-------stabilny
asymptotycznie
stabilny
…….niestabilny
x=
0
ε
η

Stabilność układów
automatyki
Kryteria stabilności układów liniowych
Kryteria stabilności układów liniowych
Kryterium stabilności nazywamy twierdzenia które
Kryterium stabilności nazywamy twierdzenia które
bez rozwiązywania równania charakterystycznego
bez rozwiązywania równania charakterystycznego
rozstrzygają problem stabilności.
rozstrzygają problem stabilności.
Rozpatrujemy dwie grupy kryteriów stabilności:
Rozpatrujemy dwie grupy kryteriów stabilności:
a) kryterium analityczne
a) kryterium analityczne
-
kryterium Hurwitza
kryterium Hurwitza
b) kryterium graficzne
b) kryterium graficzne
- kryterium Nyquista
- kryterium Nyquista

Stabilność układów
automatyki
Kryterium Hurwitza
Kryterium Hurwitza
Układ liniowy jest stabilny, jeżeli współczynniki (a
Układ liniowy jest stabilny, jeżeli współczynniki (a
0
0
, a
, a
1
1
, a
, a
n
n
) wielomianu
) wielomianu
charakterystycznego (równania charakterystycznego ) są jednakowych
charakterystycznego (równania charakterystycznego ) są jednakowych
znaków i są różne od zera.
znaków i są różne od zera.
2
3
3
2
4
s
s
s
1
2
2
3
s
s
s
--układ
niestabilny
--układ stabilny
n
n
n
n
a
s
a
s
a
s
a
1
1
1
0
n
n
n
a
a
a
a
a
a
a
a
a
a
a
a
a
a
H
2
0
5
3
1
6
4
2
0
7
5
3
1
0
0
0
det
H
H
n
Układ liniowy o wielomianie charakterystycznym o postaci
jest stabilny asymptotycznie jeżeli wszystkie kolejne minory główne
macierzy Hurwitza
są dodatnie, tzn. jest spełniony warunek
.
0
1
1
a
H
0
2
0
3
1
2
a
a
a
a
H
0
0
3
1
4
2
0
5
3
1
3
a
a
a
a
a
a
a
a
H
Stabilność układów
automatyki
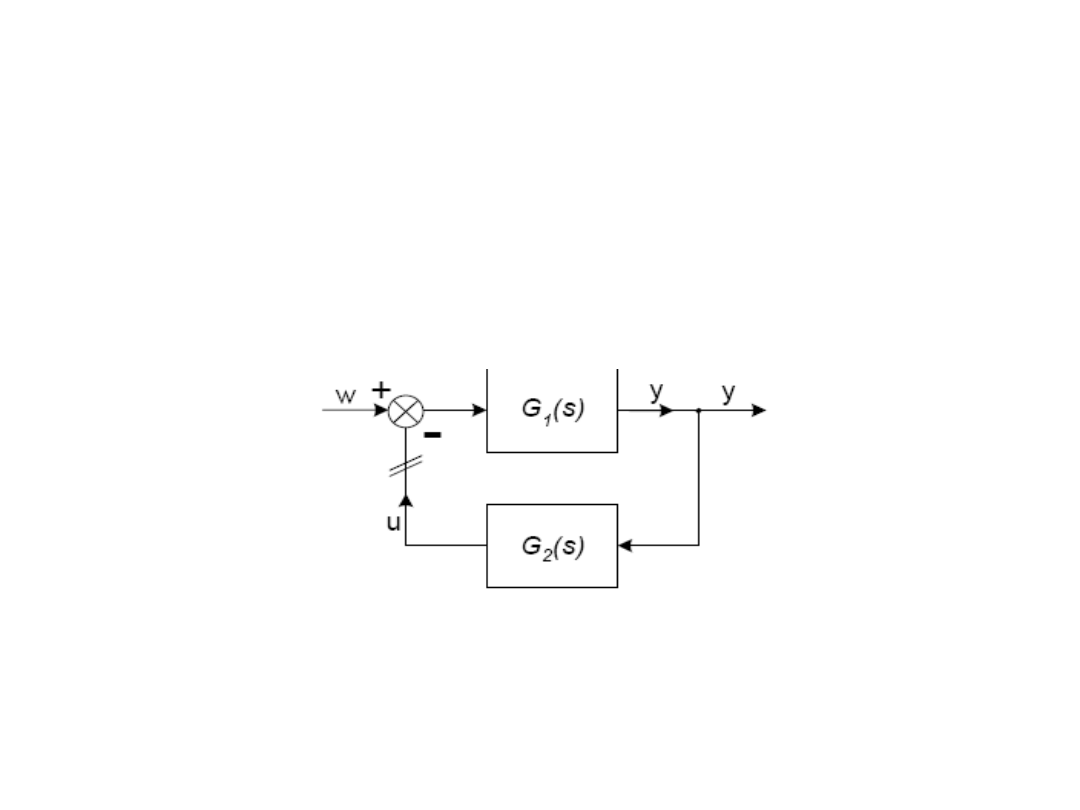
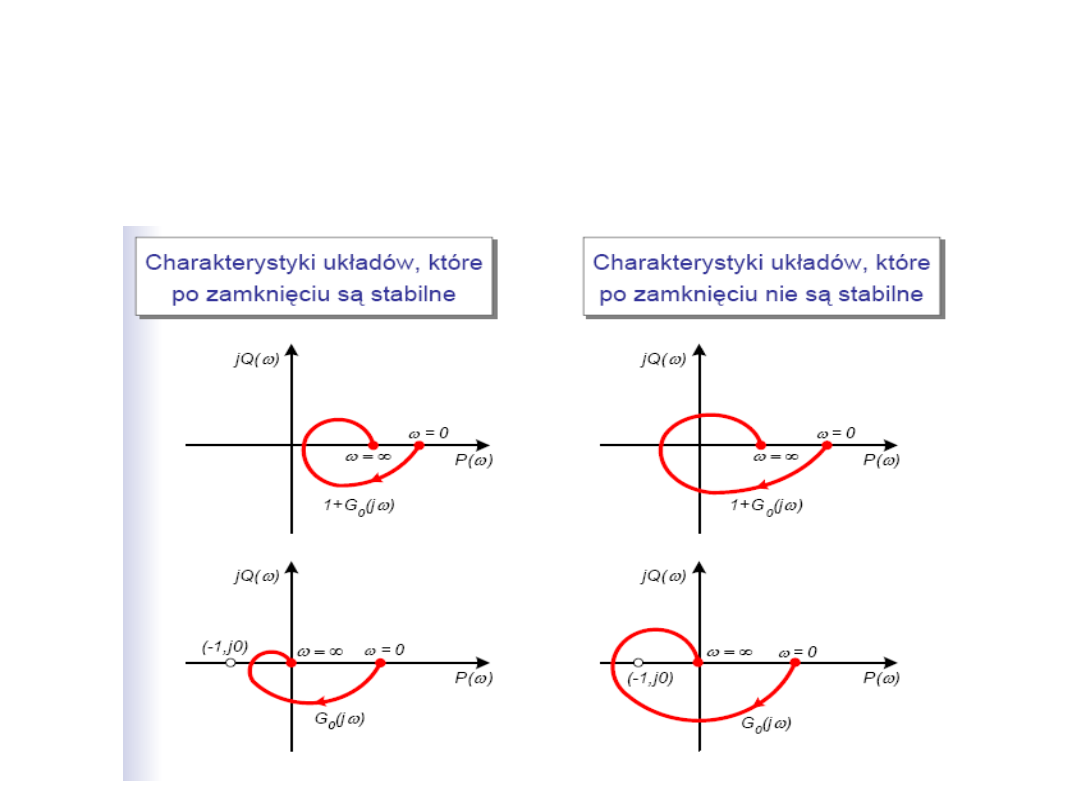
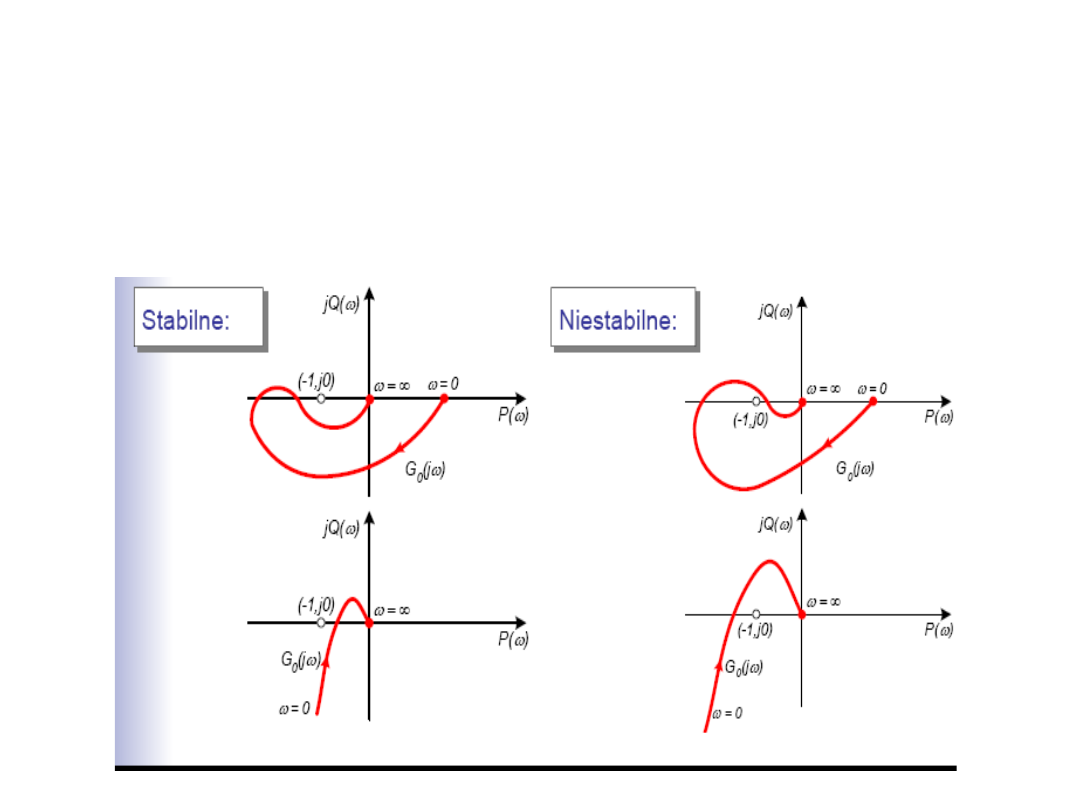
Kryterium Nyquista
Kryterium Nyquista
Kryterium to ma bardzo duże znaczenie praktyczne ponieważ pozwala
Kryterium to ma bardzo duże znaczenie praktyczne ponieważ pozwala
rozstrzygnąć problem stabilności układu zamkniętego na podstawie
rozstrzygnąć problem stabilności układu zamkniętego na podstawie
charakterystyki amplitudowo- fazowej układu otwartego, którą można
charakterystyki amplitudowo- fazowej układu otwartego, którą można
uzyskać na drodze doświadczalnej.
uzyskać na drodze doświadczalnej.
.
Układ zamknięty jest stabilny asymptotycznie przy założeniu, że układ
otwarty jest również stabilny asymptotycznie wtedy i tylko wtedy, gdy
charakterystyka amplitudowo- fazowa układu otwartego nie obejmuje
punktu -1.
Stabilność układów
automatyki
Kryterium Nyquista
Kryterium Nyquista
.
Stabilność układów
automatyki
Kryterium Nyquista
Kryterium Nyquista
.
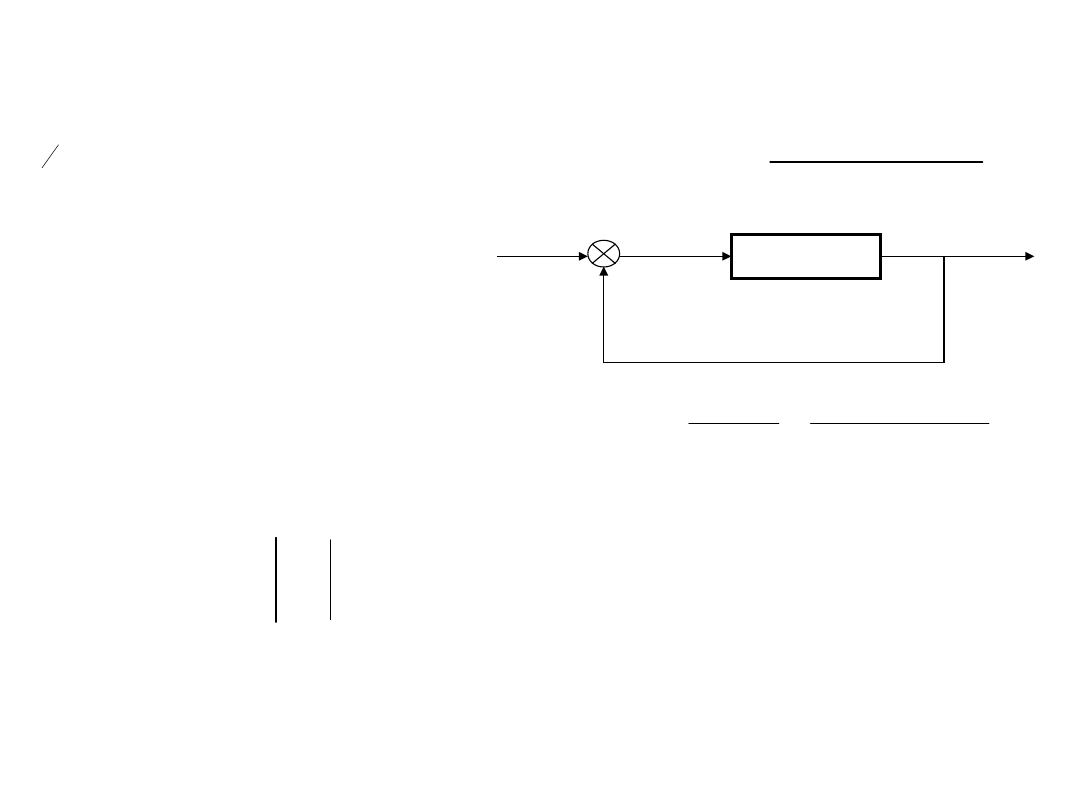
Kryterium Hurwitza- przykład
Kryterium Hurwitza- przykład
Zbadać stabilność układu zamkniętego, jeżeli transmitancja układu otwartego
K(s) wynosi:
n
n
n
n
a
s
a
s
a
s
a
1
1
1
0
n
n
n
a
a
a
a
a
a
a
a
a
a
a
a
a
a
H
2
0
5
3
1
6
4
2
0
7
5
3
1
0
0
K(s)
-
1
3
1
)
(
2
3
s
s
s
s
K
2
3
1
)
(
1
)
(
)
(
2
3
s
s
s
s
k
s
k
s
G
0
2
0
1
0
3
0
1
3
2
1
0
a
a
a
a
2
3
0
0
1
1
0
2
3
H
0
1
1
1
2
3
1
1
2
3
det
)
det(
2
H
0
2
2
3
0
0
1
1
0
2
3
det
)
det(
3
H
Document Outline
Wyszukiwarka
Podobne podstrony:
Badanie stabilności układów automatyki – symulacja komputerowa
Wykład 6 Stabilność liniowych układów automatyki (2013)
Wykład 6 Stabilność liniowych układów automatyki (2013)
Badanie stabilności układów na podstawie kryterium Nyquista Zapas?zy i wzmocnienia
Instalowanie urządzeń automatyki i obsługa prostych układów automatycznej regulacji
3 Projektowanie układów automatyki (schematy blokowe, charakterystyki)
Badanie zapasu stabilności układów dyn
37 Montowanie i testowanie połączeń układów automatyki
01 Wprowadzenie do układów automatycznego sterowania
Projektowanie układów automatyki- simulink, Automatyka
stabilność układów liniowych
15 Wykonywanie obsługi i konserwacji układów automatyki
Projektowanie układów automatyki – MATLAB
Wykład 4 Klasyfikacja i podział elementów układów automatyki (2013)
więcej podobnych podstron