18
16. Podstawy i zastosowanie analiza widma osobliwego w AUMON
SSA (Singular Spectrum Analysis SSA) to nowa technika nieparametrycznej analizy szeregów
czasowych
Rozkłada sygnał na sumę trzech niezależnych składowych:
wolnozmienny trend reprezentujący lokalną średnią
różnicę między sygnałem a średnią (składową oscylacyjną)
szum pozbawiony jakiejkolwiek struktury
Te trzy składowe traktuje się jak nowe sygnały i wyznacza z nich omówione poprzednio
podstawowe miary (np. średnią, wariancję, RMS, skośnośd, kurtozę itd.)
Zastosowanie: diagnostyka zużycia ostrza przy toczeniu oparta na SSA sygnałów drgao w 2
kierunkach.
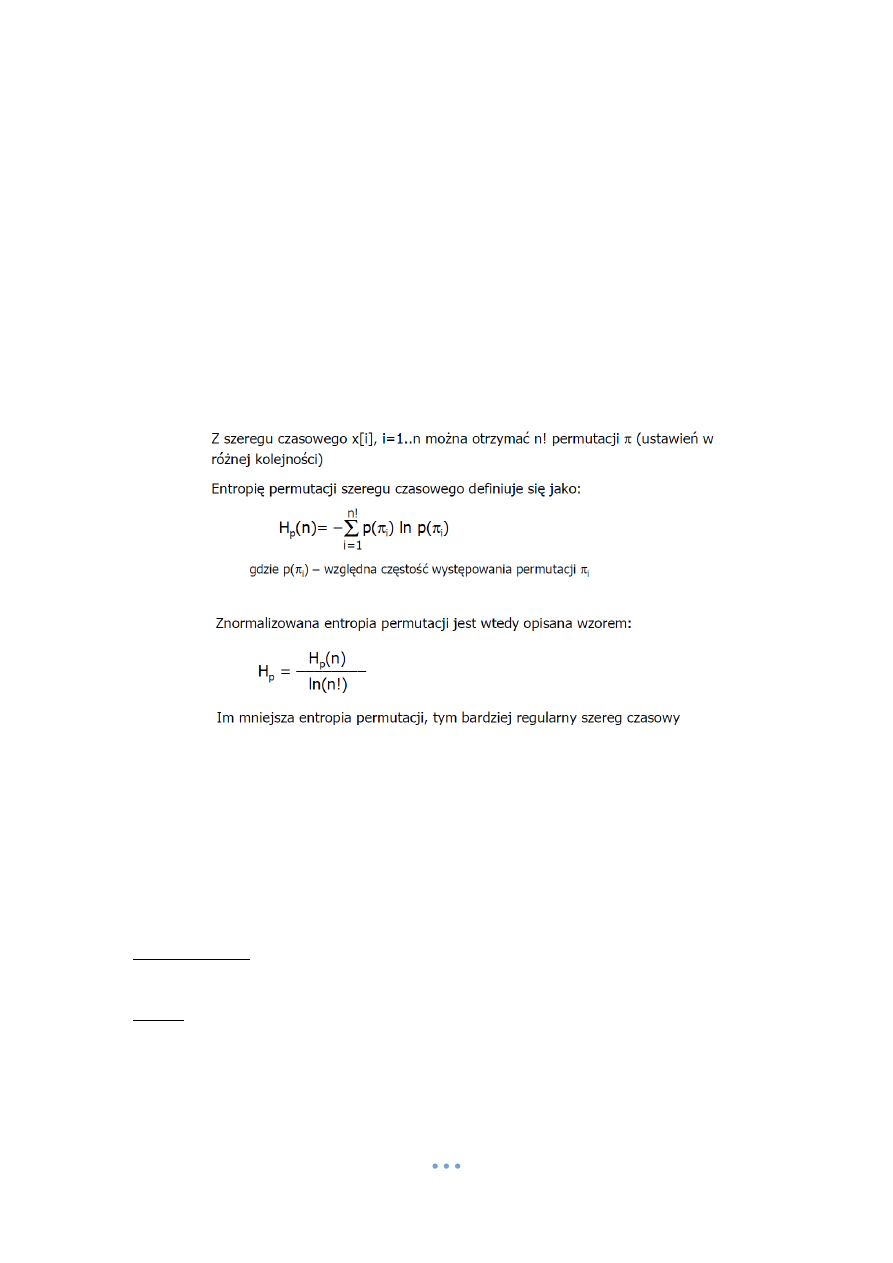
17. Podstawy i zastosowanie entropii permutacji w AUMON
Zastosowanie: Wykrywanie KSO przy frezowaniu w oparciu o pomiary prądu silnika.
V Przetwarzanie sygnałów w AUMON – dziedzina częstotliwości, wybór miar
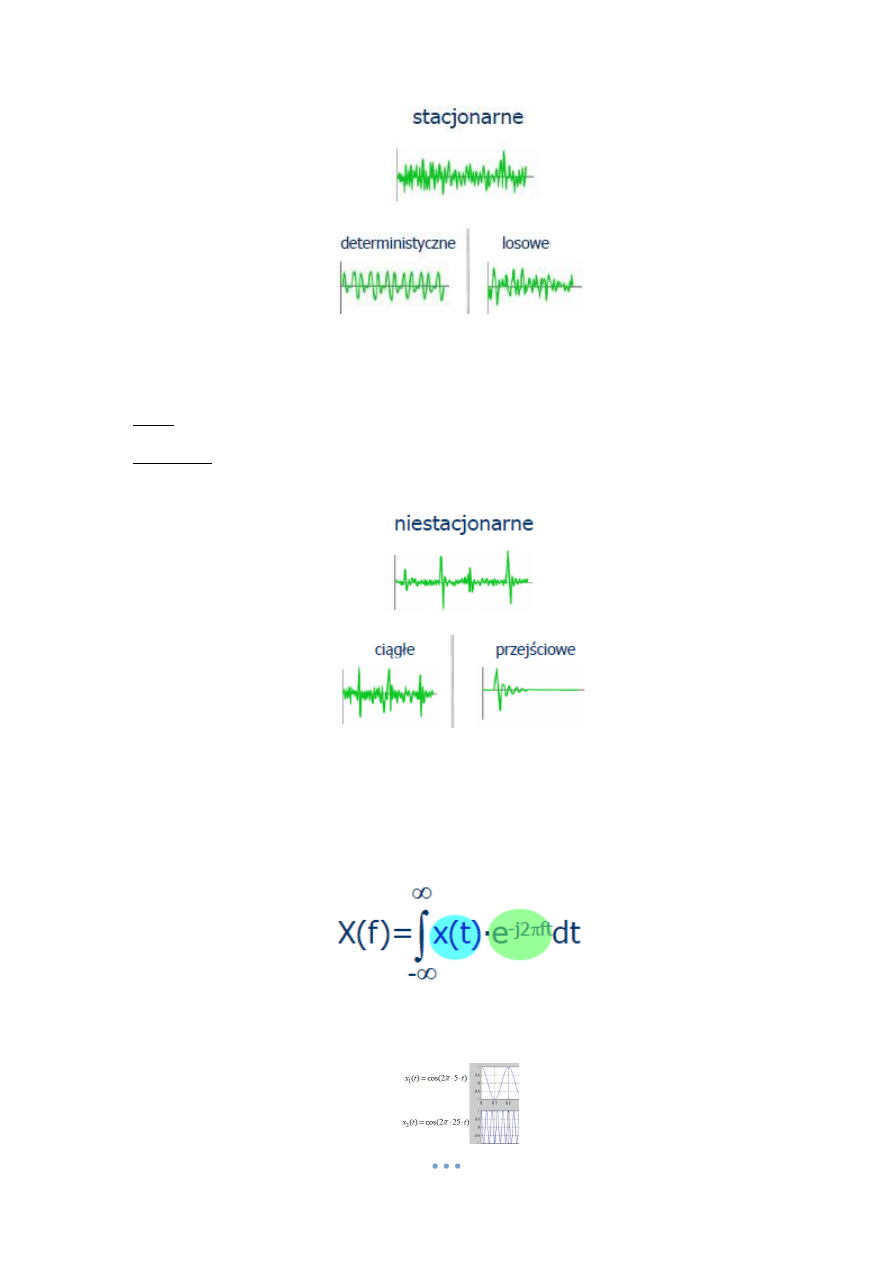
1. Charakterystyka i przykłady sygnałów stacjonarnych
Sygnały stacjonarne mają charakterystyki widmowe stałe w czasie.
Deterministyczne – chwilowa wartośd sygnału w dowolnej chwili jest przewidywalna (np.
współpracujące koła zębate)
Losowe – widmo bez wyraźnych maximów, w pewnym zakresie płaskie (np. deszcz padający na
parasolkę). Wartości przypadkowe, wartośd chwilowa nieprzewidywalna.
19
2. Charakterystyka i przykłady sygnałów niestacjonarnych
Sygnały niestacjonarne mają zmienne charakterystyki widmowe.
Ciągłe – podobne do sygnałów przejściowych i losowych (np. młot pneumatyczny)
Przejściowe – impuls mechaniczny jest krótkotrwałym wybuchem energii (np. uderzenie
młotkiem o kowadło)
W sygnałach niestacjonarnych składowe widmowe mogą się pojawiad i zanikad, dlatego do ich
opisu potrzebna jest charakterystyka czasowo-częstotliwościowa.
3. Istota transformaty Fouriera
Transformata Fouriera to iloczyn obustronnie nieskooczonych sygnałów.
Wykorzystuje funkcje Eulera (sinusoidy) jako podstawowe elementy składowe. Sinusoida o każdej
częstotliwości jest mnożona przez cały sygnał (porównywana z sygnałem).
20
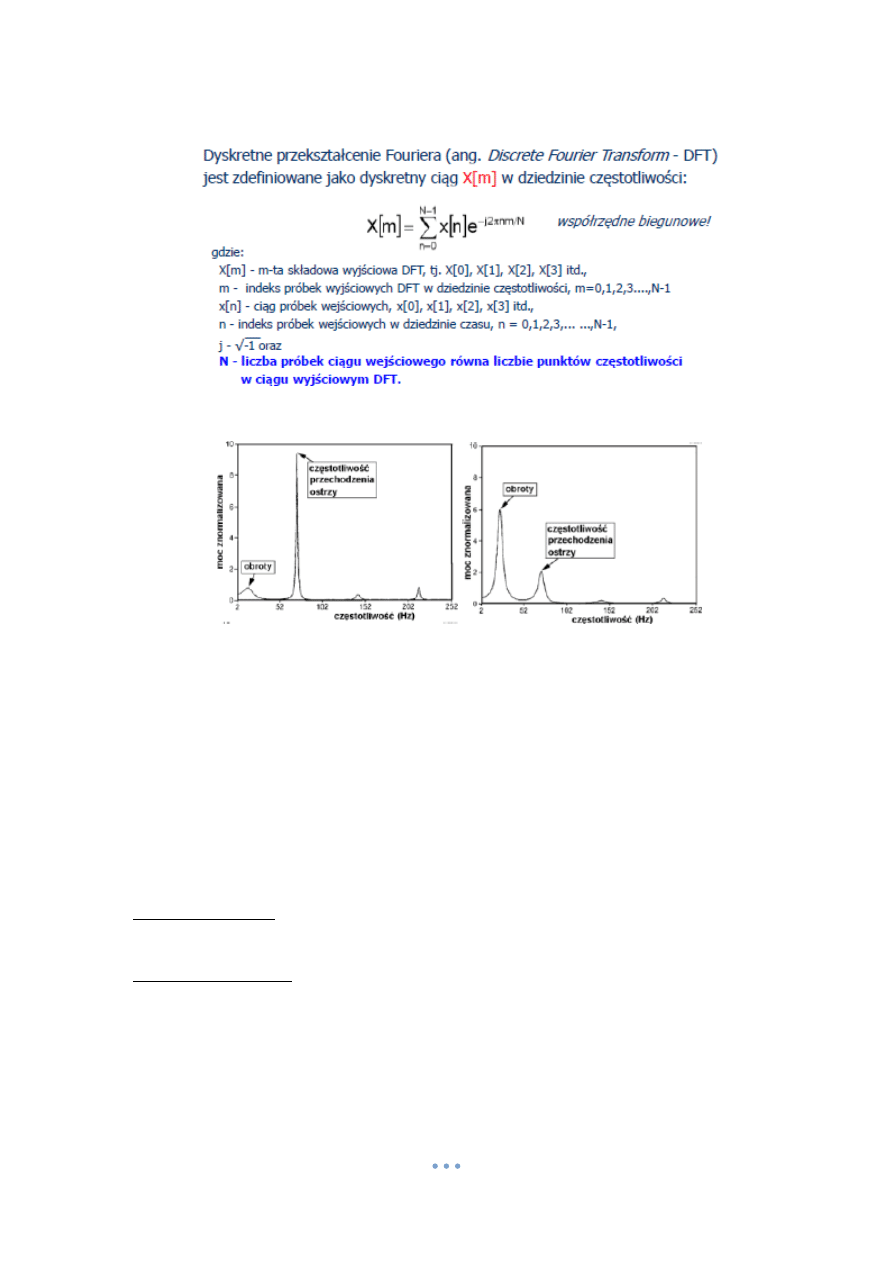
4. Dyskretne przekształcenie Fouriera
5. Wpływ KSO na widmo sygnału siły skrawania przy frezowaniu
Przed KSO
Po KSO
6. Miary sygnałów oparte na transformacie Fouriera
Bezpośrednie wykorzystanie wartości współczynników DFT X*m+ jest niepraktyczne – jest ich
wiele, energia przepływa między sąsiednimi prążkami.
Zwykle stosuje się wyznaczanie miar widma Fouriera, np.: amplitudy dominujących prążków, moc
sygnału w wybranych pasmach, energia w pasmach, miary statystyczne spektrum (średnia
częstotliwośd, wariancja, skośnośd, kurtoza), częstotliwośd najwyższego prążka.
7. Transformata Fouriera sygnałów stacjonarnych i niestacjonarnych
Sygnały stacjonarne: charakterystyki widmowe stałe w czasie, nie jest potrzebna informacja o
czasie, transformata pracuje dobrze dla sygnałów stacjonarnych.
Sygnały niestacjonarne: mają zmienne spektrum, amplituda zmienna w czasie.
8. Na czym polega krótkookresowa transformata Fouriera
STFT odpowiada kiedy w sygnale x(t) występuje krótka sinusoida e
jωt
. Jest to zestaw filtrów. Daje
dobrą informację o czasie, ale nie daje informacji o częstotliwości sygnału.
9. Wybór długości okna do STFT
21
Szerokie okno – zła rozdzielczośd w czasie, dobra rozdzielczośd częstotliwości
Wąskie okno – dobra rozdzielczośd w czasie, zła rozdzielczośd częstotliwości
10. Zasada nieoznaczoności Heisenberga
Rozdzielczośd w czasie i częstotliwośd nie mogą jednocześnie byd arbitralnie duże!
Nie możemy dokładnie wiedzied, w której chwili występuje składowa o określonej częstotliwości;
możemy wiedzied jakie zakresy częstotliwości występują w jakich przedziałach czasu.
11. Transformata falkowa –wzory, rodzaje, stosowane miary
Falka – funkcja okna. Wyszukiwanie składowych o wysokich częstotliwościach (wąskie okno).
Wyszukiwanie składowych o niskich częstotliwościach (szerokie okno). Rodzaje: dyskretna,
wielopoziomowa, pakietowa.
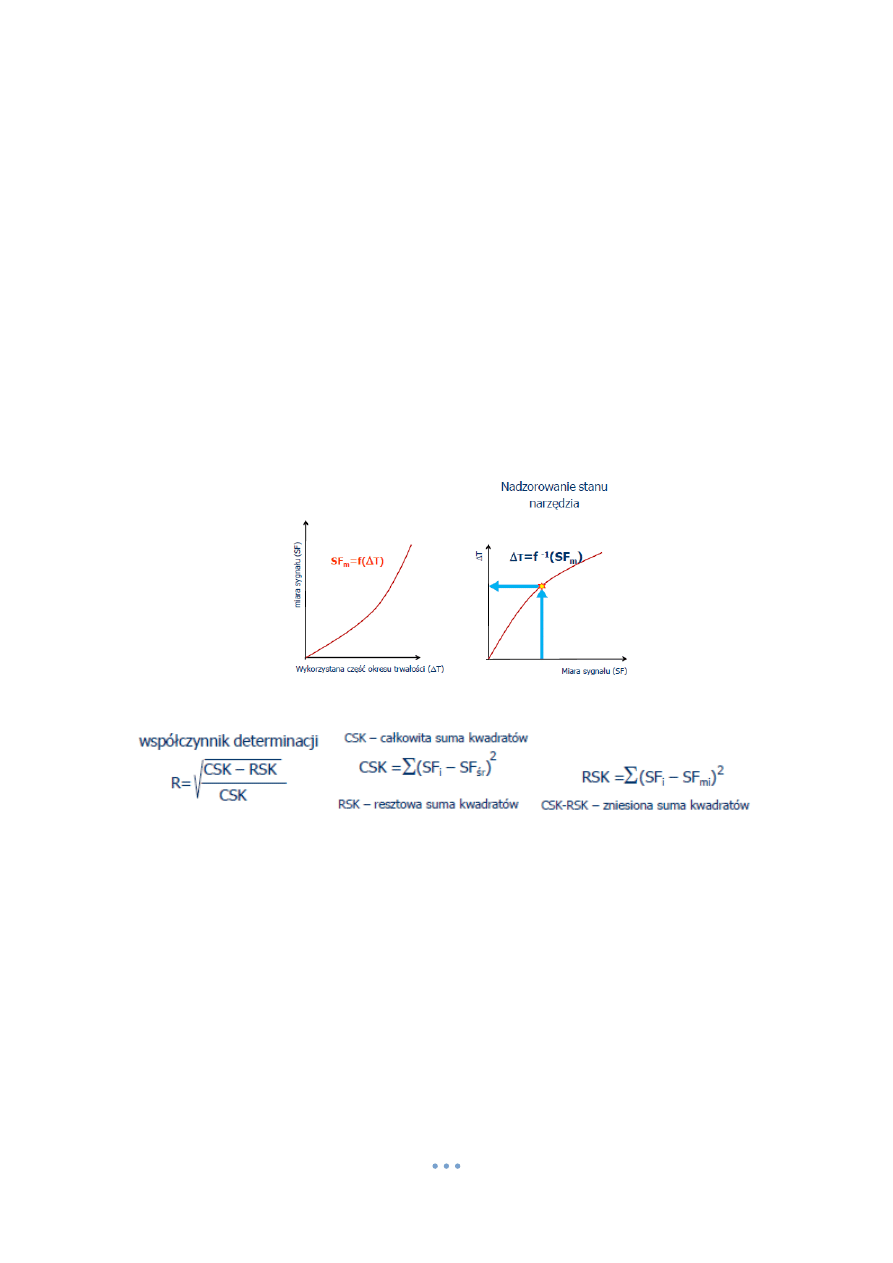
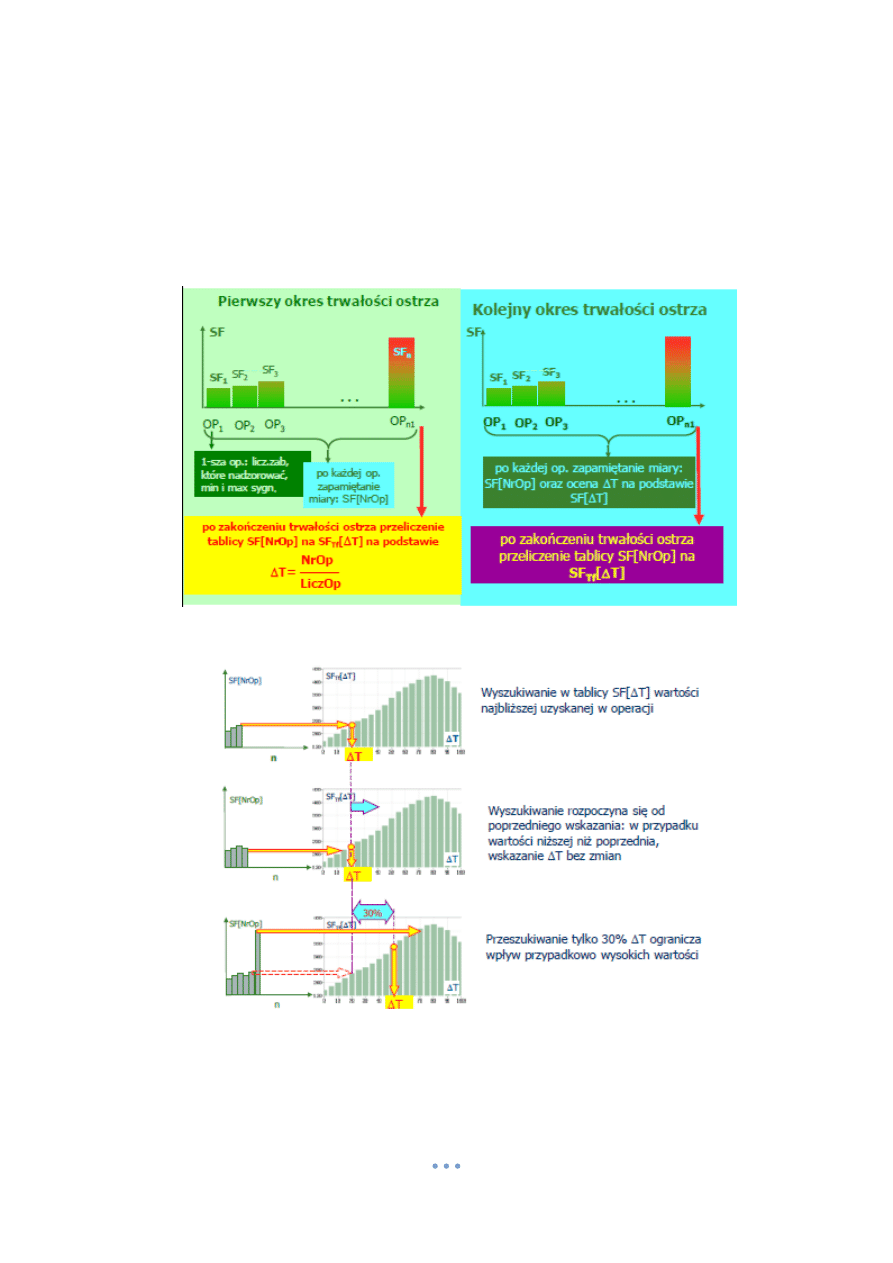
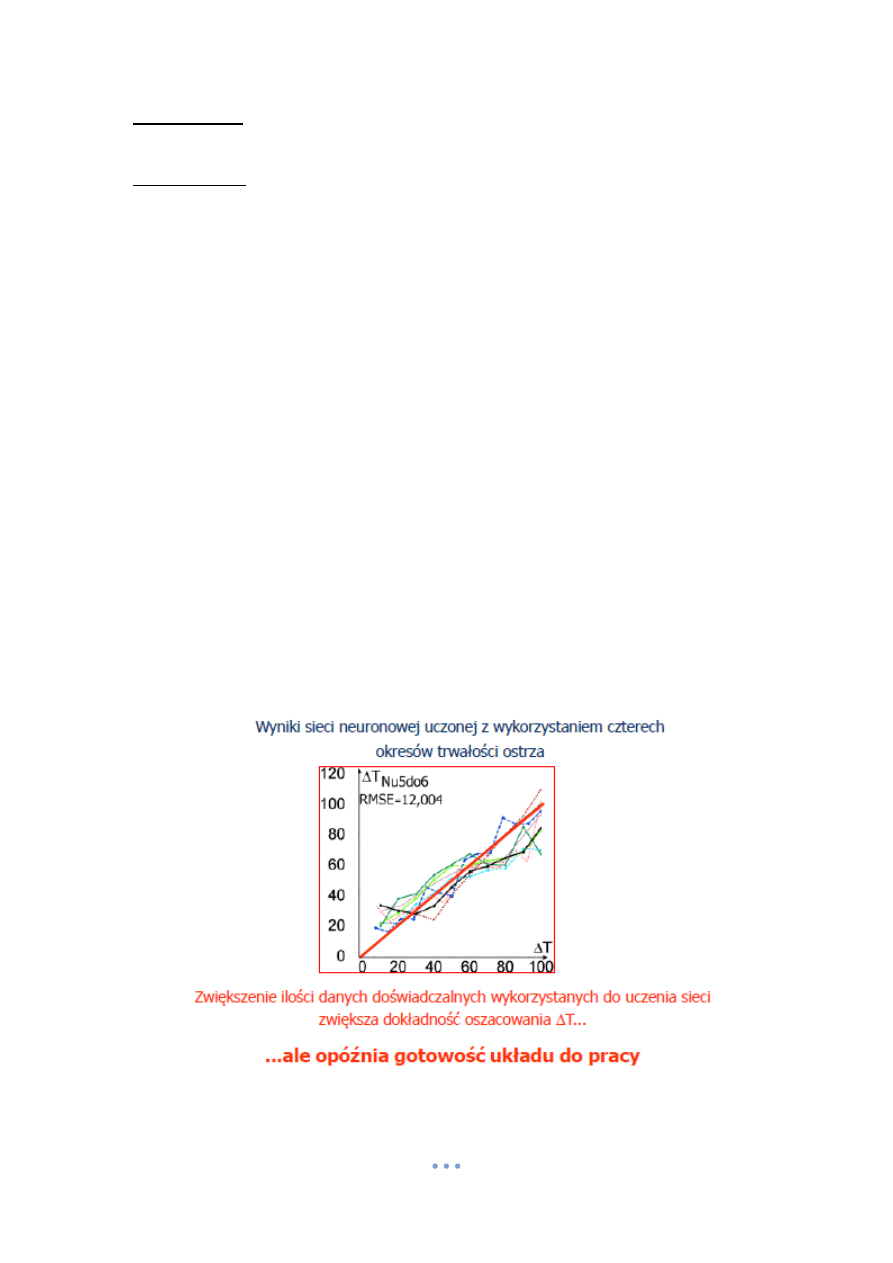
12. Modelowanie zależności miary od wykorzystanej części okresu trwałości ostrza
13. Ocena powiązania miar sygnału ze zużyciem przy pomocy współczynnika determinacji
14. Ocena powtarzalności zależności miary od stanu narzędzia
Dysponując kilkoma okresami trwałości ostrza można określid powtarzalnośd przebiegu miary.
Wyznacza się średnią przebiegu SF
Tfav
i traktuje jako uśredniony model zależności SF(∆T).
Następnie wyznaczamy współczynnik determinacji R
r
2
, który pozwala określid, na ile przebiegi są
powtarzalne. Odrzuca się miary, dla których R
r
2
jest mniejsze od założonego progu.
15. Eliminacja miar podobnych – cel, sposób postępowania
22
16. Ocena przydatności miar sygnałów do diagnostyki zużycia
Wybieramy z dostępnych miar np. 15 typu RMS, energia, skośnośd. Liczymy liczbę przekroczeo.
Sumujemy.
VI Podejmowanie decyzji w układach AUMON – jedna miara
1. Diagnostyka zużycia ostrza w układach komercyjnych
Niezależnie od sposobu obróbki i użytego czujnika
2. Podstawowe założenia działania układów ADONiS
zdobywanie przez układ większości niezbędnych informacji w trakcie obróbki pierwszego
przedmiotu
23
automatyczne wyznaczanie dopuszczalnej wartości miary na podstawie decyzji
użytkownika o stępieniu ostrza (uczenie układu)
określanie nie tylko momentu stępienia ostrzy lecz także ocena wykorzystanej części
okresów trwałości
autodiagnostyka układu
3. Ogólne zasady uczenia układu ADONiS
4. Oszacowanie wykorzystanej części okresu trwałości ostrza w układzie ADONiS
24
VII Podejmowanie decyzji w układach AUMON – wiele miar, sieci neuronowe
1. Obszar zastosowania sztucznej inteligencji
Zastosowanie do wielu problemów, których rozwiązanie nie daje się ująd w ścisłe reguły oraz
wymagają tak dużej liczby obliczeo, że są niewykonalne. W tych przypadkach rozwiązania
wymagają pewnej dozy inteligencji.
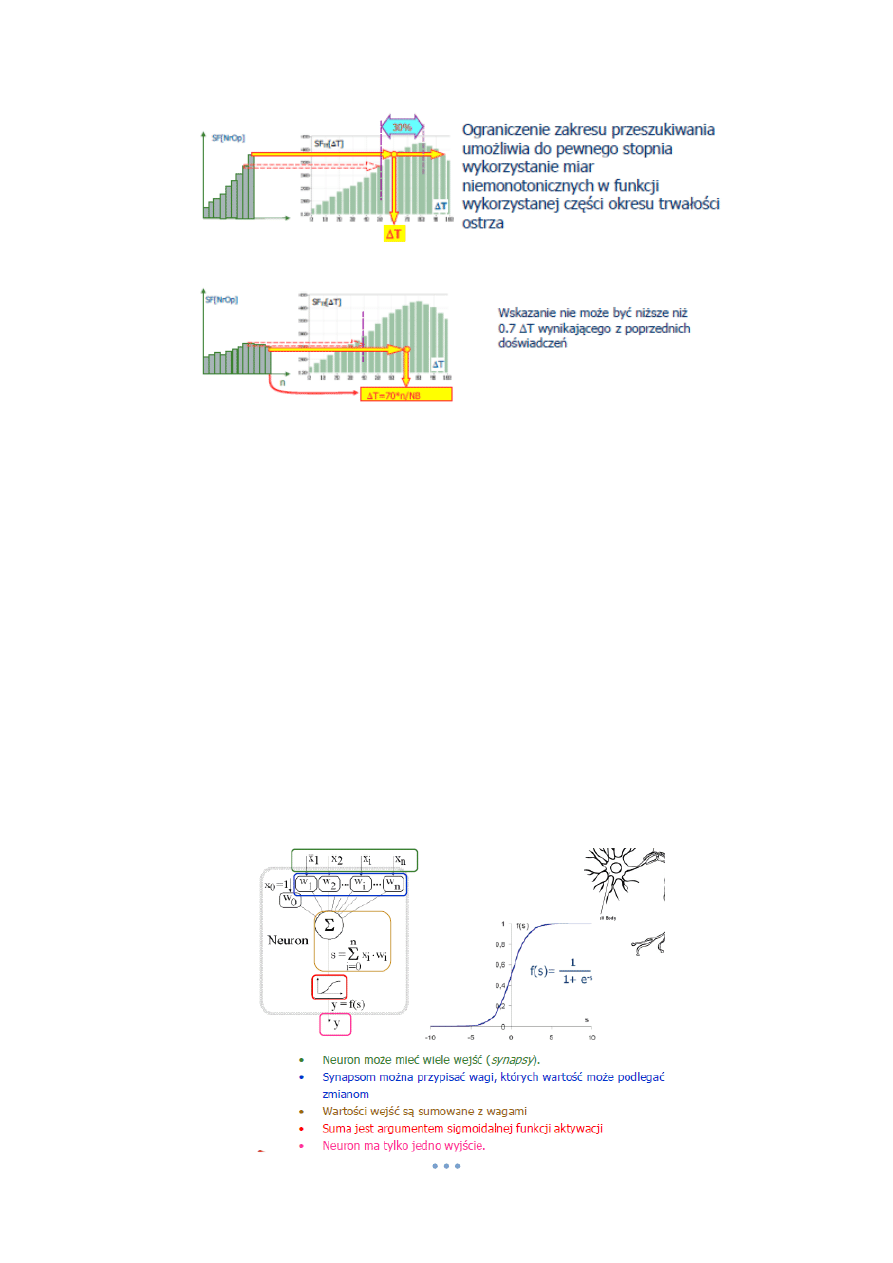
2. Budowa i działanie biologicznego neuronu
Biologiczny neuron składa się z jądra, wielu dendrytów (wejścia) i aksonu, czyli jedynego wyjścia.
Synapsy na koocach dendrytów i aksonów przekazują informacje. Akson jest połączony poprzez
synapsy z dendrytami innych neuronów. Dendryty dostarczają do komórki poziom sygnału. Jeśli
sygnał osiągnie wartośd progową, neuron pobudza się i sygnał jest przekazywany do kolejnych
komórek.
3. Budowa i działanie sztucznego neuronu
25
4. Uczenie pojedynczego neuronu
Uczenie odbywa się z nauczycielem. Każdemu zestawowi danych wejściowych x
1
+x
2
odpowiada
zadana wartośd wyjścia z, z którą będzie porównywana odpowiedź neuronu y. Uczenie ma na
celu minimalizację energetycznej funkcji błędu.
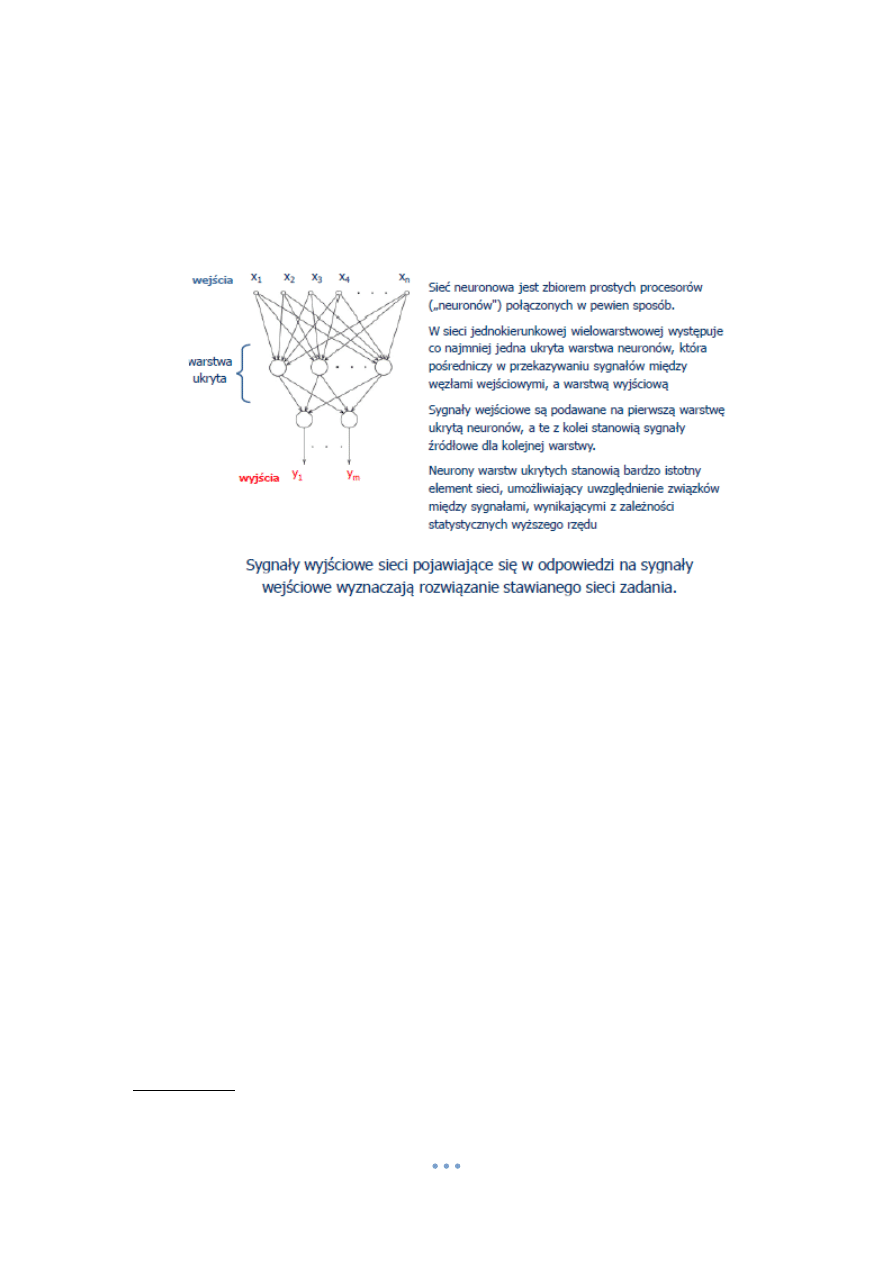
5. Budowa sieci neuronowej jednokierunkowej, trzywarstwowej
6. Uczenie sieci neuronowej metodą wstecznej propagacji błędów
Wyjścia y są porównywane z wartościami zadanymi z
k
. Po przedstawieniu (iteracji) sieci całego
zbioru wyznaczane są nowe wartości wag neuronu wyjściowego dla następnej iteracji, a
następnie wartości wag neuronów w warstwie ukrytej.
7. Wybór konfiguracji wejśd do NN diagnozującej zużycie w oparciu o siły skrawania
Zwracamy uwagę na:
wynik sieci
prędkośd uczenia (szybko, wolno)
cenę czujnika
wynik uczenia
błędy testowania
wyrazistośd wyników
błędy uczenia
zakłócenia pomiędzy sygnałami wejściowymi
8. Pruning komórek – do czego służy, na czym polega, jak się prowadzi
Do czego służy: gdy badamy sieci o różnych wejściach, ale tej samej liczbie komórek w warstwie
ukrytej to częśd z nich może byd zbędna i powinna byd wyeliminowana
26
Na czym polega: gdy średni błąd uczenia e
u
spadnie poniżej zadanego progu, przeprowadza się
pruning komórek, czyli obcinanie zbędnych gałęzi
Jak się prowadzi: program analizuje zmiennośd wyjśd komórek w warstwie pośredniej w trakcie
prezentacji całego zbioru uczącego, następnie wybiera wyjście najmniej zmienne (mniejsze od
parametru pruningu), a na koocu usuwa je i zaczyna trening ponownie.
9. Zależnośd przebiegu uczenia sieci od stanu początkowego, rola zakłóceo
Jakośd uczenia sieci zależy od przypadkowo dobranych wartości inicjujących uczenie.
Mimo znacznych zakłóceo błędy uczenia systematycznie maleją, a więc sied nie traci zdobytej
wiedzy i nie musi uczyd się od początku.
Wprowadzenie zakłóceo losowych daje wyraźną poprawę wyników uczenia, jednakże sied
pozostaje w dalszym ciągu duża. Ponadto występują znacznie wyższe wartości błędów
testowania niż uczenia.
10. Przesuwanie wag sieci – efekty
Komórki, których wyjścia mają małą zmiennośd mogą zostad zepchnięte poza zakres i stracid
wrażliwośd na wartośd sygnałów z warstwy poprzedniej.
Komórki, których zmiennośd spada znacznie przestają brad udział w działaniu sieci i mogą zostad
usunięte.
Pogorszenie wyników sieci uczących.
11. Ograniczenia zastosowania NN w diagnostyce zużycia ostrza
27
VIII Podejmowanie decyzji w układach AUMON – wiele miar, logika rozmyta, algorytmy
hierarchiczne
1. Logika binarna a rozmyta
W tradycyjnej teorii zbirów i przetwarzania danych zbiór elementów jest ściśle określony i
pojedynczy element należy do tego zbioru lub nie.
W teorii zbiorów rozmytych element może należed do wielu zbiorów z różnym stopniem
przynależności. Taka logika jest znacznie bliższa rzeczywistości, zwłaszcza potocznej, i zgodna z
naturalnym sposobem rozumowania człowieka.
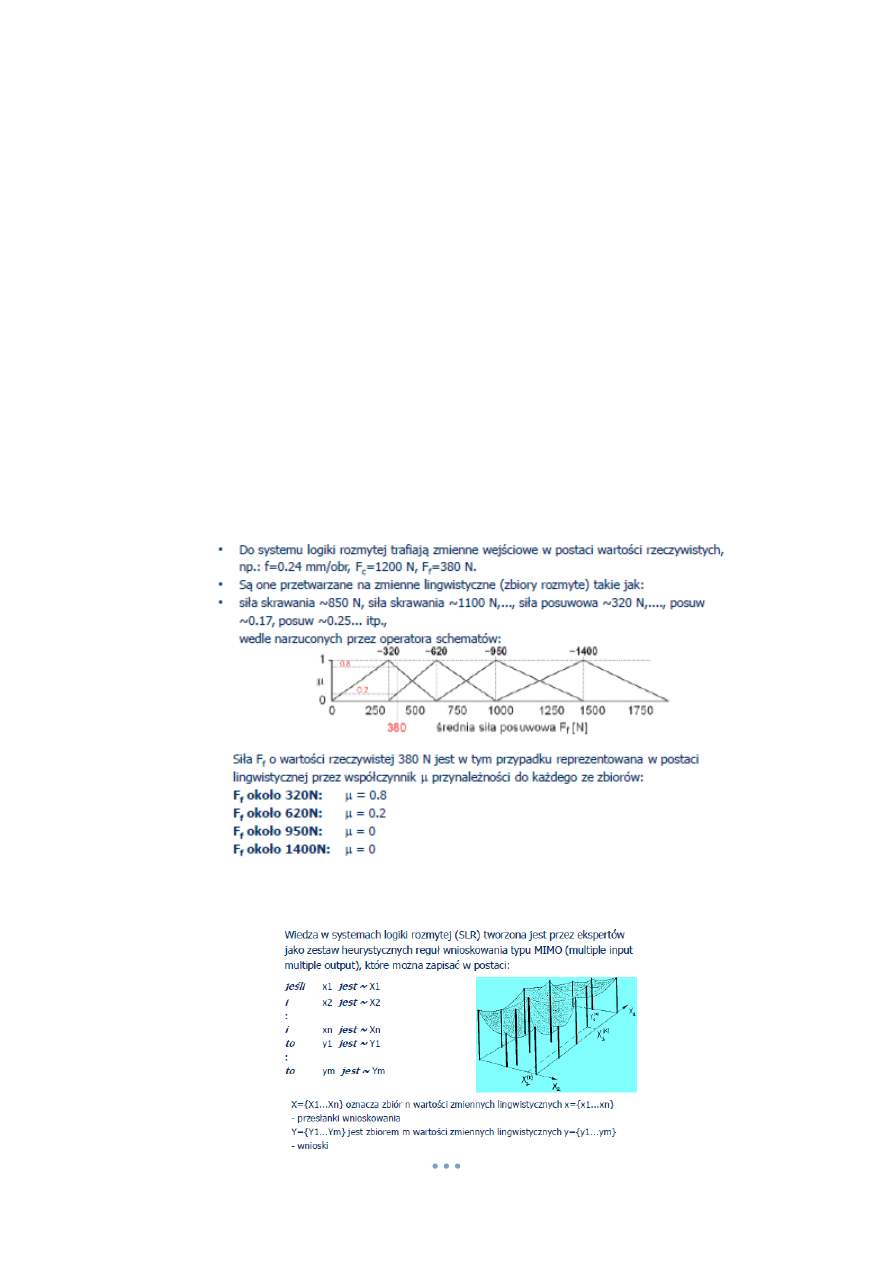
Stwórzmy zbiór sił skrawania „niskie” co będzie znaczyło ~300N i zbiór sił skrawania „wysokie” co
oznacza ~600N. Zarejestrowana siła 400N będzie jednocześnie należała do obu tych zbiorów, ale
ponieważ jest bliższa „niskim” niż „wysokim”, przynależnośd do pierwszego z nich będzie większa
niż do drugiego. Możemy powiedzied, że siła jest w 66% niska zaś w 33% wysoka.
Taka właśnie charakterystyka stanowi podstawę teorii zbiorów rozmytych i jest całkowicie
odmienna od klasycznej teorii zbiorów.
2. Przetwarzanie zmiennych rzeczywistych na zbiory rozmyte (zmienne lingwistyczne)
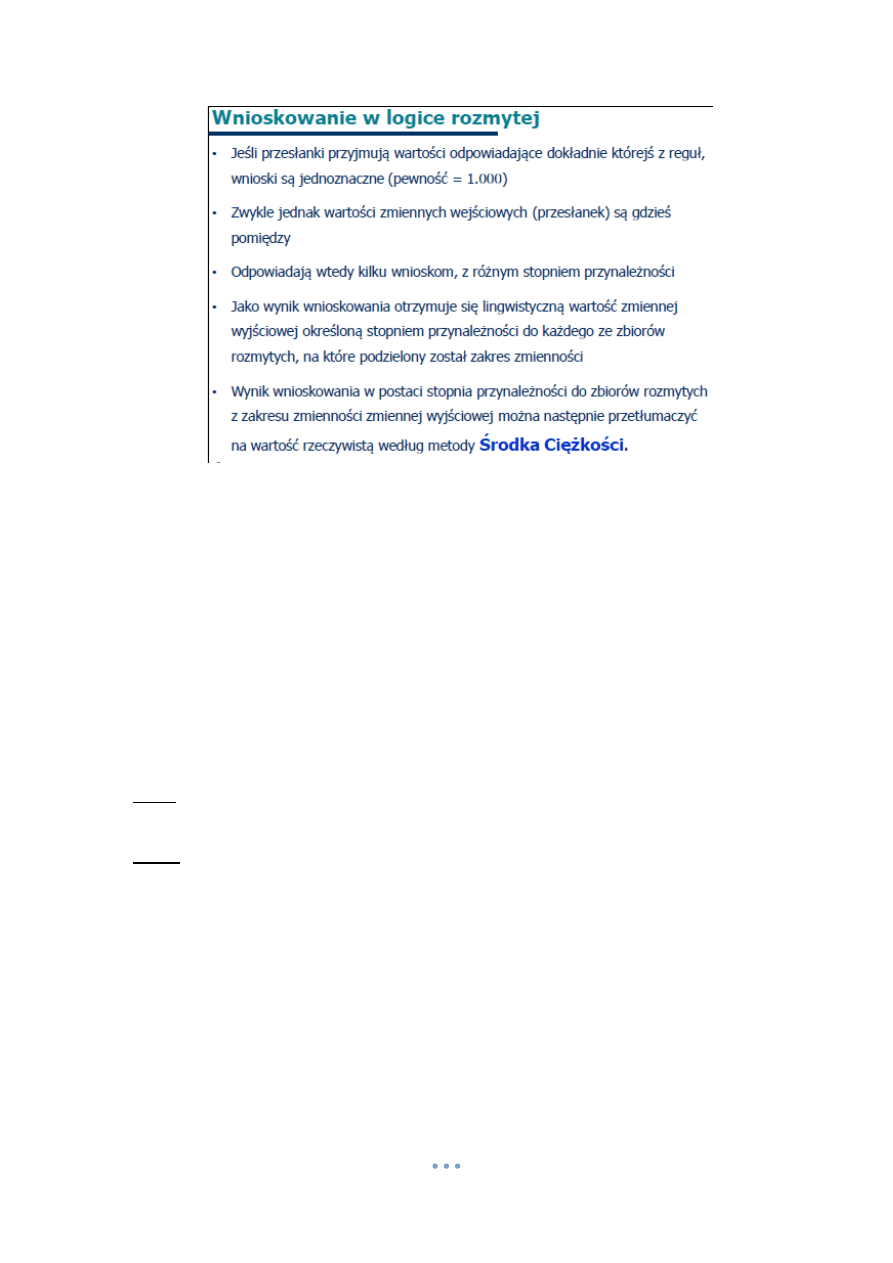
3. Budowa bazy wiedzy i wnioskowanie w logice rozmytej
28
4. Zakres zastosowania, wady i zalety logiki rozmytej
Podstawowymi zaletami systemów logiki rozmytej są:
brak konieczności tworzenia modelu matematycznego - baza wiedzy tworzona jest w postaci
zestawu praktycznych reguł
baza wiedzy definiowana jest jako zestaw praktycznych zasad wnioskowania za
pośrednictwem zmiennych lingwistycznych
duża skutecznośd wnioskowania przy danych zakłóconych lub niepewnych, które występują
nader często w zastosowaniach przemysłowych (tu zakres zastosowania)
zawartośd danych wejściowych i duża prędkośd przetwarzania
5. Integracja miar przy pomocy algorytmu hierarchicznego
Etap I: Oszacowanie zużycia ostrza w oparciu o pojedyncze miary (sieci neuronowe, logika
rozmyta, model zależności miary od zużycia)
Etap II: Integracja pojedynczych wyników we wspólne oszacowanie zużycia (sieci neuronowe,
uśrednianie)
Dowolna liczba miar w pierwszym etapie. W drugim etapie można eliminowad wyniki znacznie
odbiegające od średniej, nietypowe.
IX Podejmowanie decyzji w układach AUMON – wykrywanie KSO, wióry
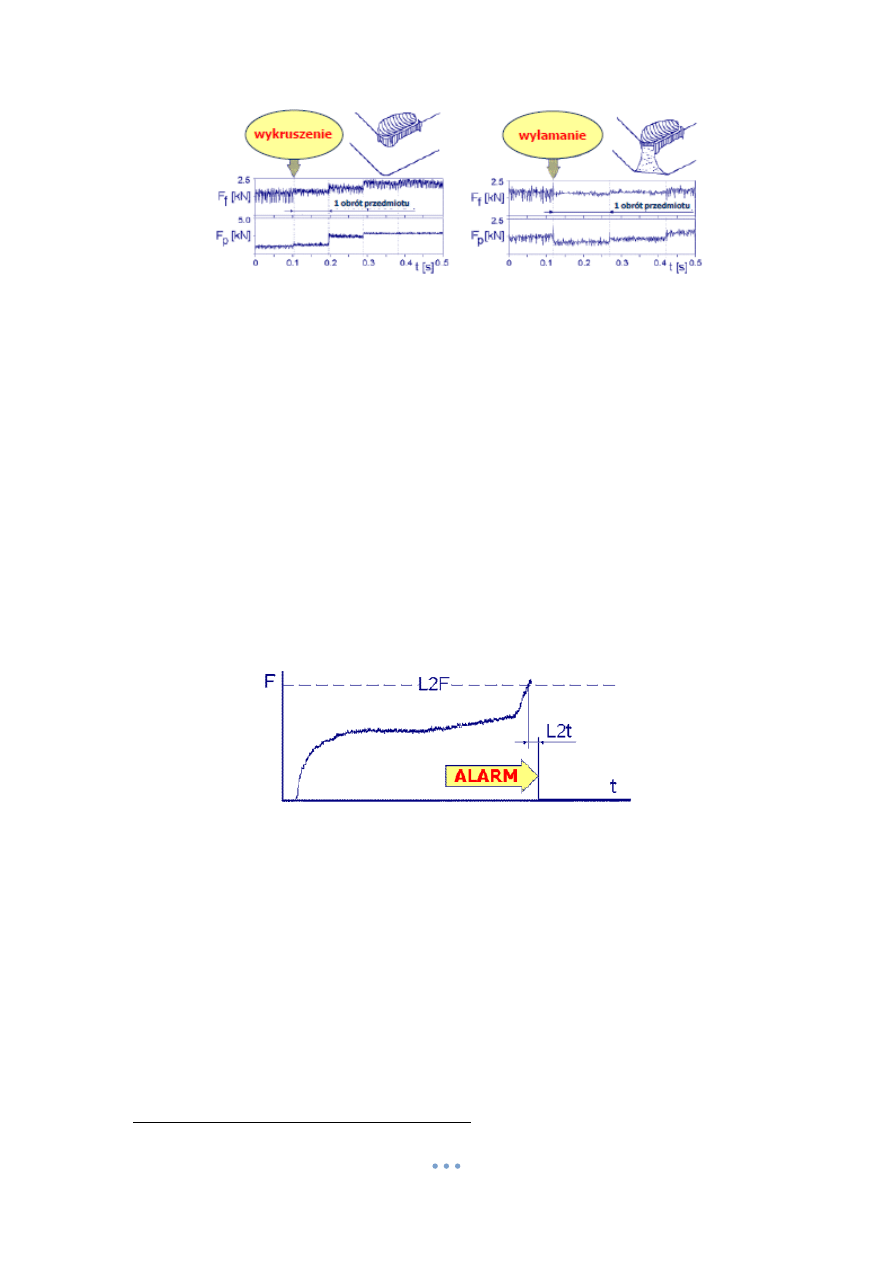
1. Przebieg sił skrawania towarzyszący KSO przy toczeniu
29
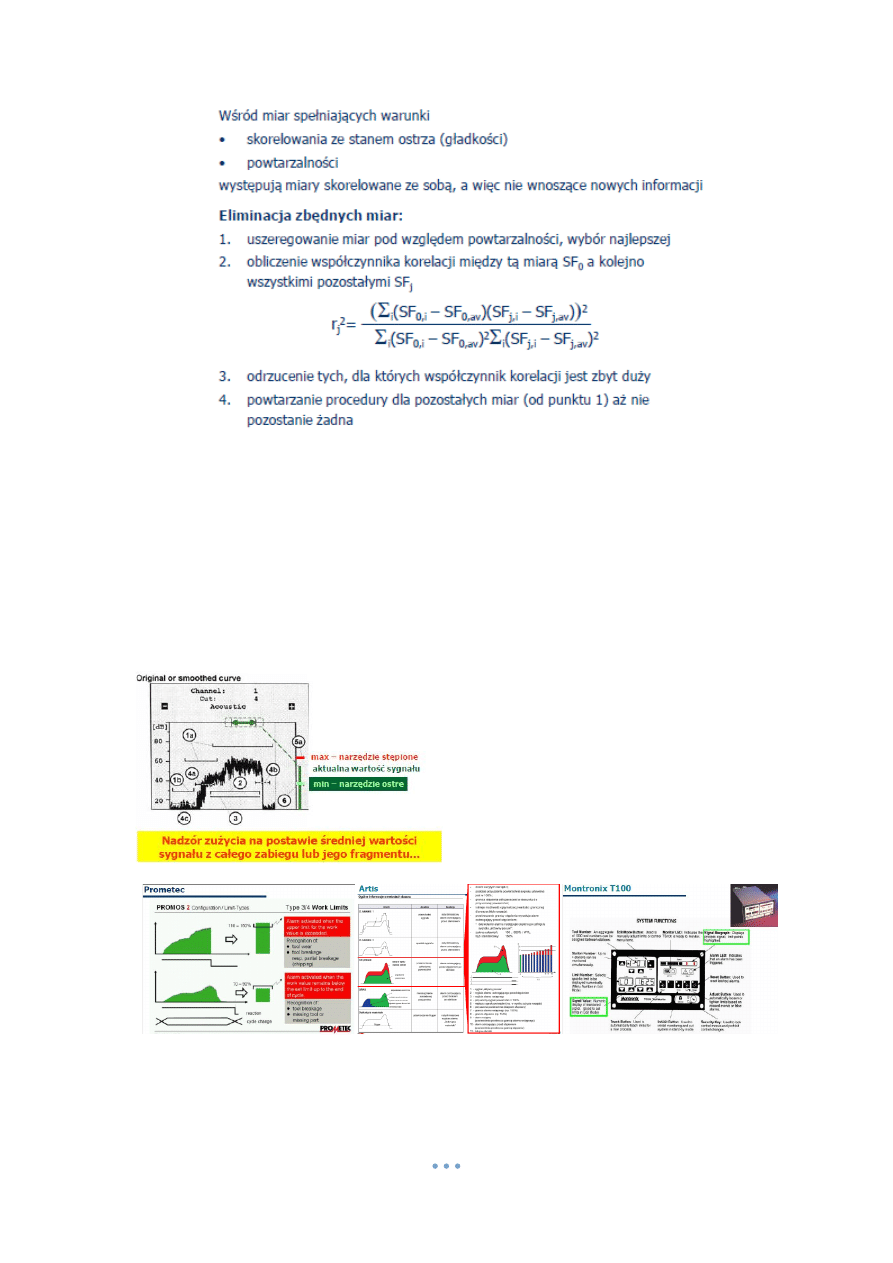
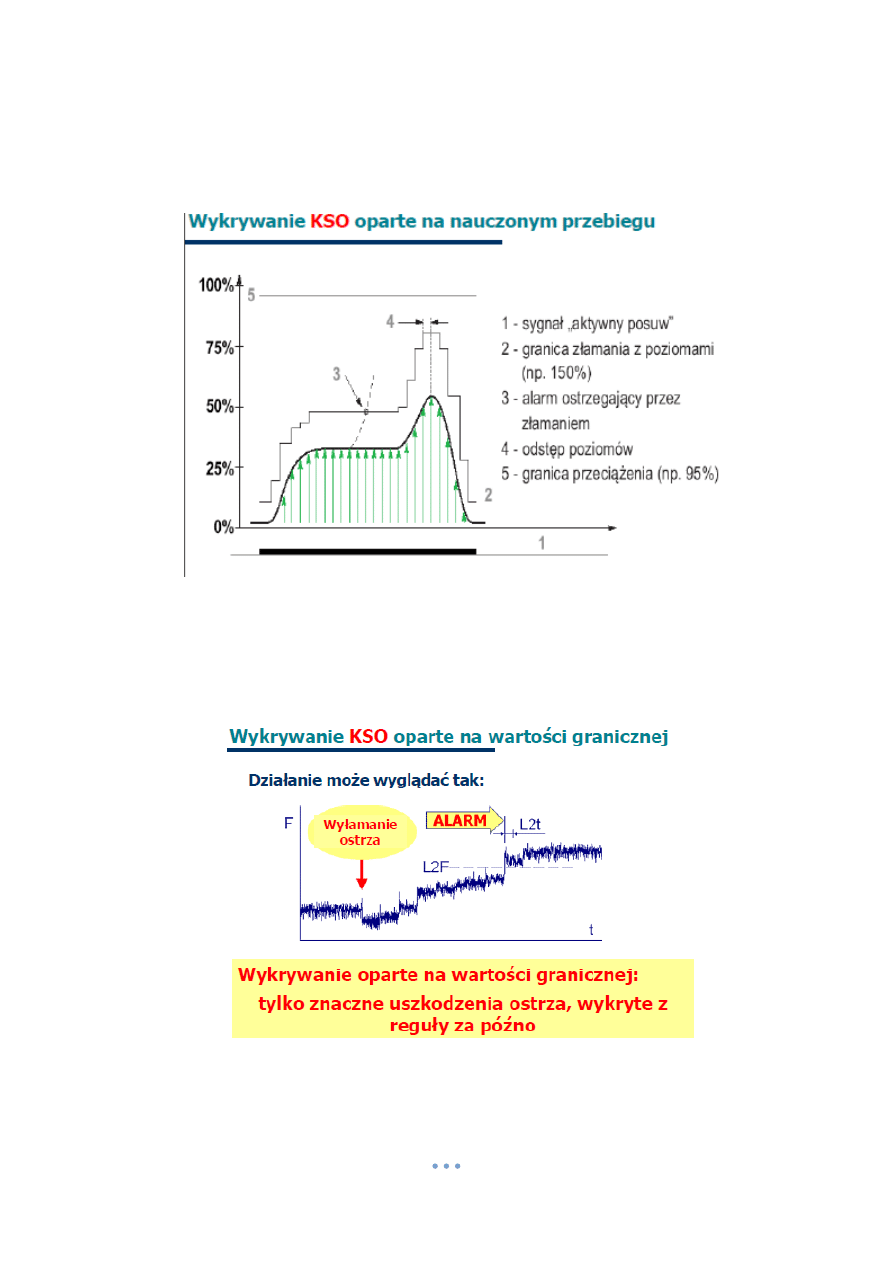
2. Wykrywanie KSO w oparciu o wartości graniczne lub nauczony przebieg sygnału
Katastroficznemu stępieniu ostrza towarzyszy najczęściej znaczny wzrost sił skrawania a także
emisji akustycznej czy drgao. Fakt ten jest wykorzystywany w większości znanych strategii
wykrywania KSO.
Główne założenia:
zapamiętywana jest wartośd mierzonego sygnału towarzyszącego skrawaniu
narzędziem ostrym, a przynajmniej nadającym się do dalszej pracy, w najprostszym
przypadku jest to maksymalna wartośd sygnału w czasie operacji Fmax_0
na podstawie wartości wyznacza się krytyczny poziom sygnału, oznaczający
katastroficzne stępienie ostrza jako Fmax_0*L2F gdzie L2F=1,5-3,0
KSO jest sygnalizowane po przekroczeniu poziomu krytycznego, przy czym w celu
ograniczenia liczby fałszywych alarmów wymagane jest, by przekroczenie to trwało
co najmniej założony czas del=1-20ms.
Stałe dla całej operacji granice mogą byd stosowane wówczas, gdy przebieg sygnału jest w jej
trakcie w przybliżeniu ustalony. Jednak jeśli narzędzie skrawa z różnymi parametrami skrawania,
fragmenty operacji, w czasie których parametry te są niskie, byłyby oczywiście nadzorowane
bardzo źle ze względu na duży dystans sygnału prawidłowego od progu ustalonego dla
najwyższych w czasie operacji parametrów.
Gdy w przebiegu operacji można wyróżnid etapy o wyraźnie różnych poziomach sygnału, można
zastosowad granice oddzielne dla każdego występującego zestawu parametrów skrawania.
Ponieważ katastroficznemu zużyciu ostrza może towarzyszyd nie tylko wzrost ale i spadek
wartości sygnału diagnostycznego wynikający ze spadku przekroju warstwy skrawanej,
stosowane są także granice dolne, których przekroczenie od góry oznacza KSO.
Wykrywanie KSO oparte na nauczonym przebiegu:
30
Jeśli przebieg zmienności sygnału w czasie operacji jest bardziej złożony, tzn. nie można go
podzielid na etapy o ustalonej wartości, cały czas trwania operacji może byd podzielony na równe
niewielkie odcinki. Granice określane są oddzielnie dla każdego z nich na podstawie najwyższej
zarejestrowanej wartości sygnału.
Strategia taka jest bardzo wrażliwa na niewielkie nawet przesunięcia w czasie przebiegu operacji-
zbyt wczesne wystąpienie etapu, w którym sygnał jest wysoki powoduje fałszywy alarm. Uniknąd
tego można stosując technikę: granica dla danego odcinka czasu wyznaczana jest na podstawie
maksymalnej wartości sygnału w odcinku poprzedzającym, aktualnym i następnym. Powoduje to
rozszerzenie stref z wysoką wartością sygnału i ograniczenie fałszywych alarmów.
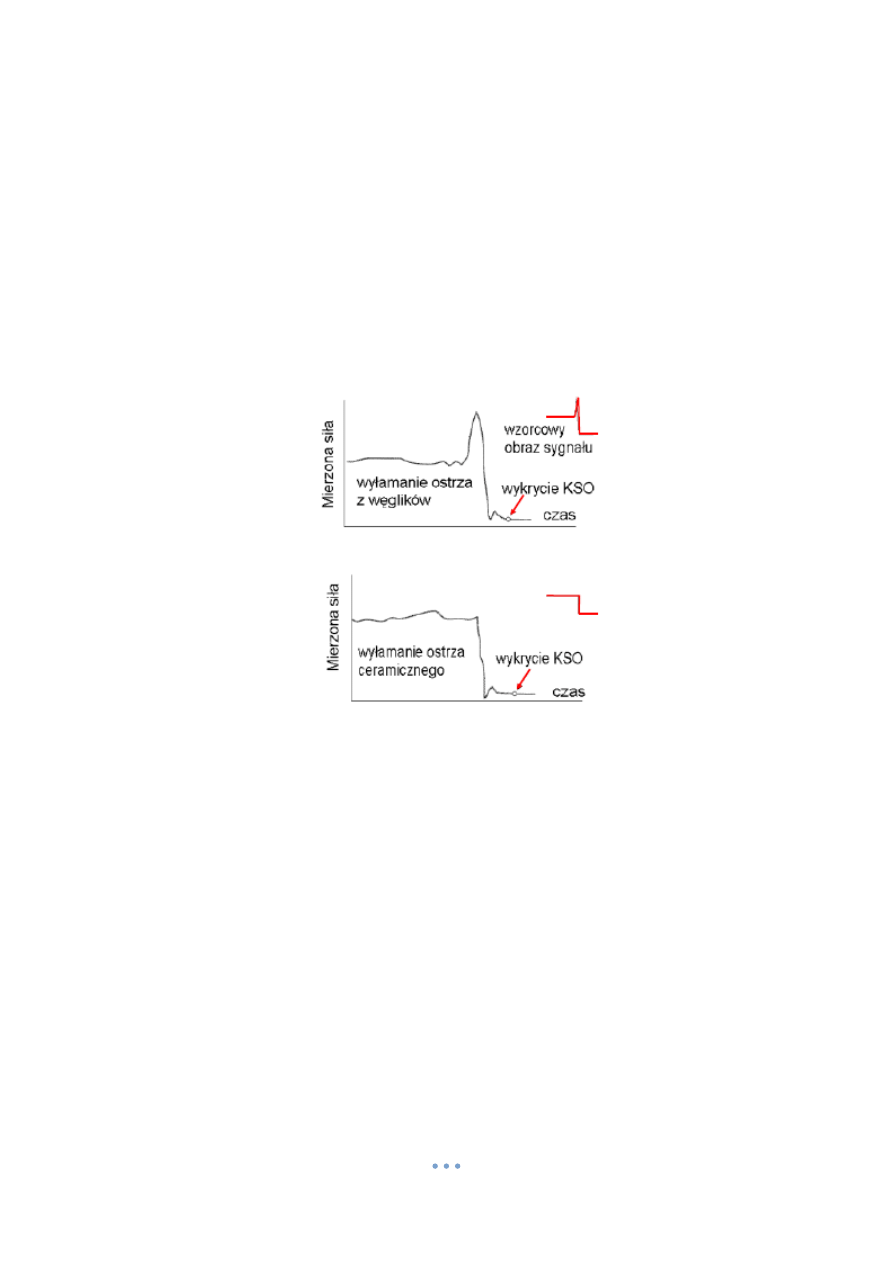
3. Wykrywanie KSO w oparciu o rozpoznawanie wzorca
31
W odróżnieniu od strategii opisanych we wcześniejszym punkcie nie śledzi się wartości sygnałów,
lecz ich zmiany. Sama jego wartośd, a tym bardziej wartośd w poprzednich operacjach nie jest
brana pod uwagę, a więc nie jest potrzebna.
Wielkości sterujące w tej strategii nie są zatem zależne od parametrów skrawania i nie jest
istotna dokładna wartośd samej siły, co oznacza że nie jest wymagana wysoka dokładnośd
statyczna zastosowanego czujnika.
Strategia oparta jest na rozpoznawaniu charakterystycznego przebiegu sił skrawania
towarzyszącego KSO. Układ pamięta szereg obrazów. Pamiętane są także przebiegi sił
towarzyszące skrawaniu przerywanemu. Układ stale śledzi przebieg sił i w razie zidentyfikowania
jednego z zapamiętanych obrazów sygnalizuje alarm w przeciągu mniej niż 10ms.
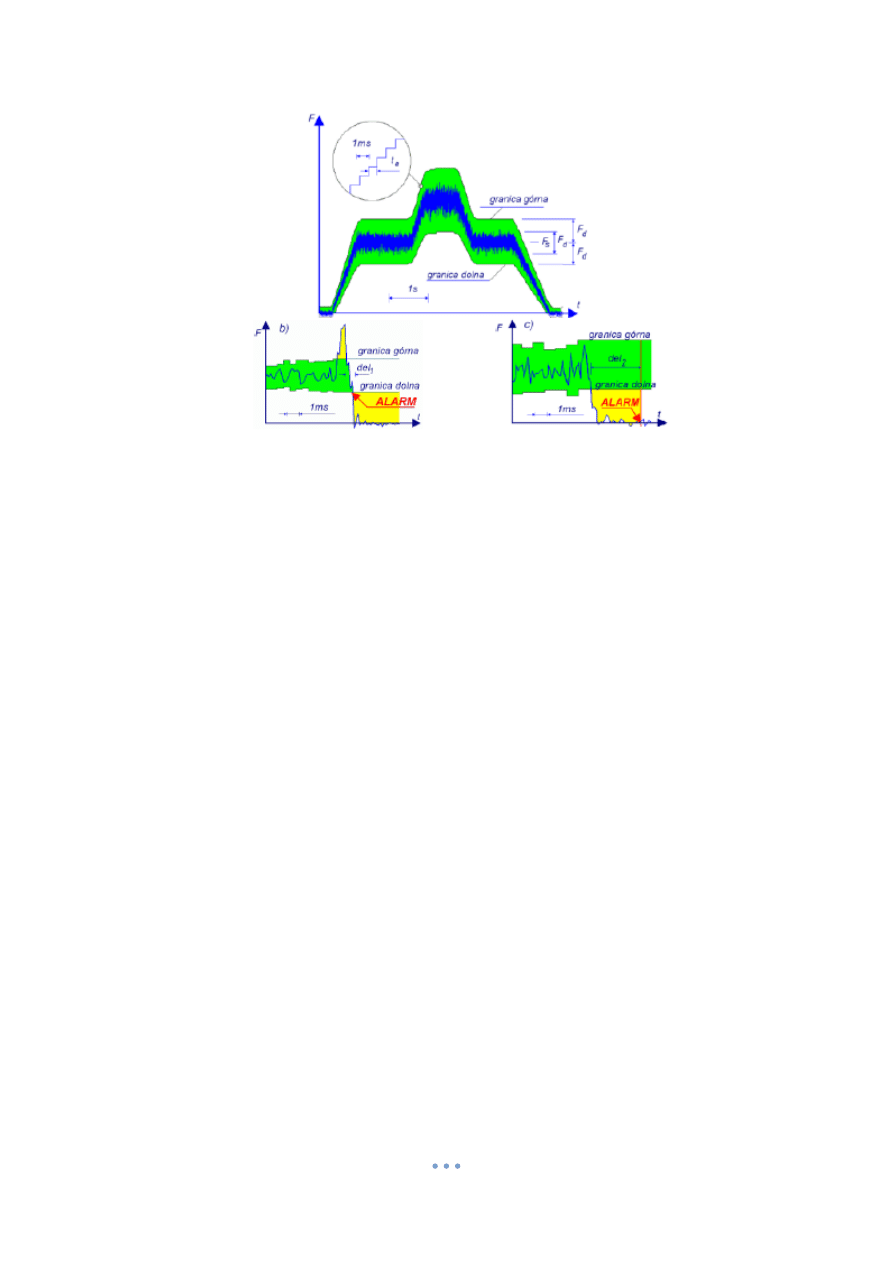
4. Strategia wykrywania KSO przy toczeniu opracowana w TH Aachen
Strategia opracowana w TH Aachen bazuje na granicach dynamicznych tzn. dopasowujących się
do wartości sygnału na bieżąco, lecz z ograniczoną szybkością. Strategii tej nie należy mylid z
wzorem przebiegu, który nie zmienia się w czasie jednego cyklu obróbki, czy rozpoznawaniem
obrazu. Tu wykrywane są bardzo szybkie zmiany sił powodujące przekroczenia jednej lub obu
granic, które po takim przekroczeniu przestają się dopasowywad. Układ monitorujący stale (tzn.
częściej niż co 1ms) oblicza dolną i górną granicę na podstawie średniej siły Fs oraz amplitudy
składowej dynamicznej Fd. W rezultacie uzyskuje się zmienne w czasie pasmo tolerancji. Dzięki
temu ignorowane są zmiany sił wynikające ze zmian warunków skrawania takich jak nawet 4-
krtnne zmiany głębokości skrawania czy twardości, które występują zwłaszcza przy wstępnej
obróbce lanych lub kutych przygotówek.
32
Wady:
potrzeba wykrycia szybkiego wzrostu i spadku siły, trwającego około 0,1ms sprawia że
koniczne jest stosowanie czujnika o bardzo dobrych właściwościach dynamicznych
nawet znacznym wyłamaniom ostrza nie musi towarzyszyd istotne zmniejszenie
przekroju warstwy skrawanej a w konsekwencji wyraźne zmniejszenie siły skrawani
5. Strategia wykrywania KSO przy toczeniu opracowana w ZAOiOS
W instytucie technologii maszyn PW podjęto próbę eliminacji wad strategii TH Aachen.
Oparto się przy tym na podstawowych cechach charakteryzujących przebieg sił skrawania po
wykruszeniu lub wyłamaniu ostrza, upraszczając je nieco:
średnie wartości sił skrawania zmieniają się na skutek KSO w czasie 0,5-2ms
po KSO siły utrzymują się na zmienionym poziomie przez co najmniej jeden obrót PO
Pierwsza z wyróżnionych cech umożliwia odróżnienie zmian sił spowodowanych przez KSO od
wynikających np. ze zmian naddatku. Druga pozwala na eliminację naturalnych, często bardzo
dużych i szybkich zakłóceo sił pochodzących od nierównomierności procesów zachodzących w
strefie skrawania oraz od łamania wióra. Nadzorowana może byd dowolna składowa siły
skrawania: Ff, Fp, Fc lub inna wygodna do pomiaru miara pod warunkiem wystarczających
właściwości dynamicznych układu pomiarowego.
33
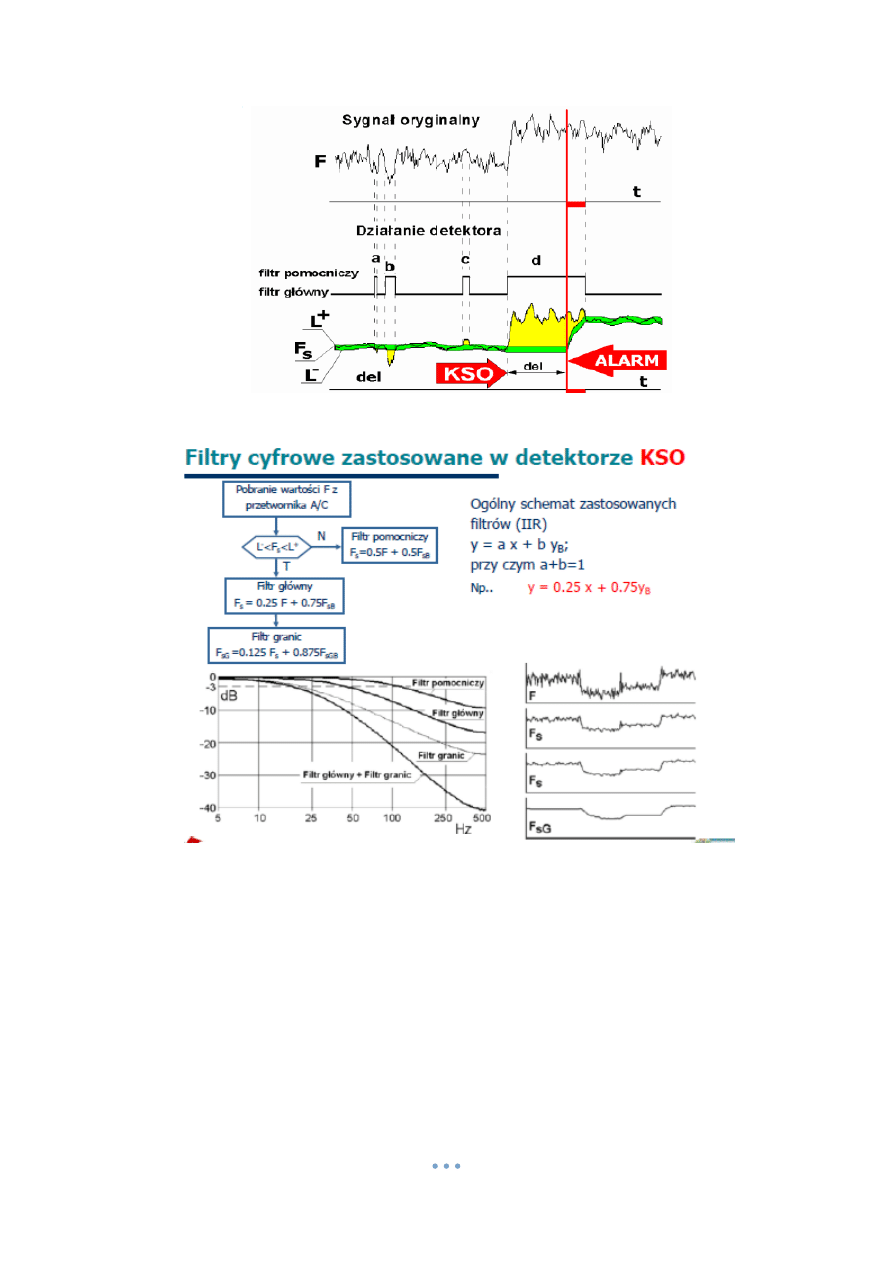
6. Filtry cyfrowe zastosowane w detektorze KSO ZAOiOS
Z prawej strony pokazano przebieg zmiennej składowej siły po kolejnych etapach tej obróbki,
czyli skutki filtrowania.
Cyfrowe filtry zastosowane w detektorze oparte są na ogólnym schemacie:
y=2
-sh
x+(1-2
-sh
)y
B
gdzie: sh- stała filtru będąca liczbą naturalną
x= wielkośd wejściowa (poddawana filtrowaniu)
y- wielkośd wyjściowa (wynik filtrowania)
y
B
- poprzednia wartośd wielkości wyjściowej y.
34
Filtry te są bardzo szybkie, ponieważ wykorzystują jedynie operacje dodawania, odejmowania i
przesuwania bitowego w prawo (shr- Shift right) liczb całkowitych.
Na wstępie detektor pobiera wartośd siły F z przetwornika analogowo-cyfrowego. Jeżeli
poprzednia wartośd siły F
s
nie mieści się w wyznaczonych granicach, sygnał jest filtrowany słabym
filtrem pomocniczym (sh=1), który eliminuje jedynie impulsowe zmiany siły. Jeśli wartośd F
s
jest
zawarta w wyznaczonych granicach, stosowany jest filtr główny (sh=2). Jak widad na rys
amplituda zmian Fs jest po takim filtrowaniu znacznie mniejsza od amplitudy oryginalnej wartości
siły F. Z kolei na podstawie Fs oblicza się wolnozmienną składową siły skrawania F
sG
, stanowiącą
podstawę do wyznaczania szerokości pasma tolerancji.
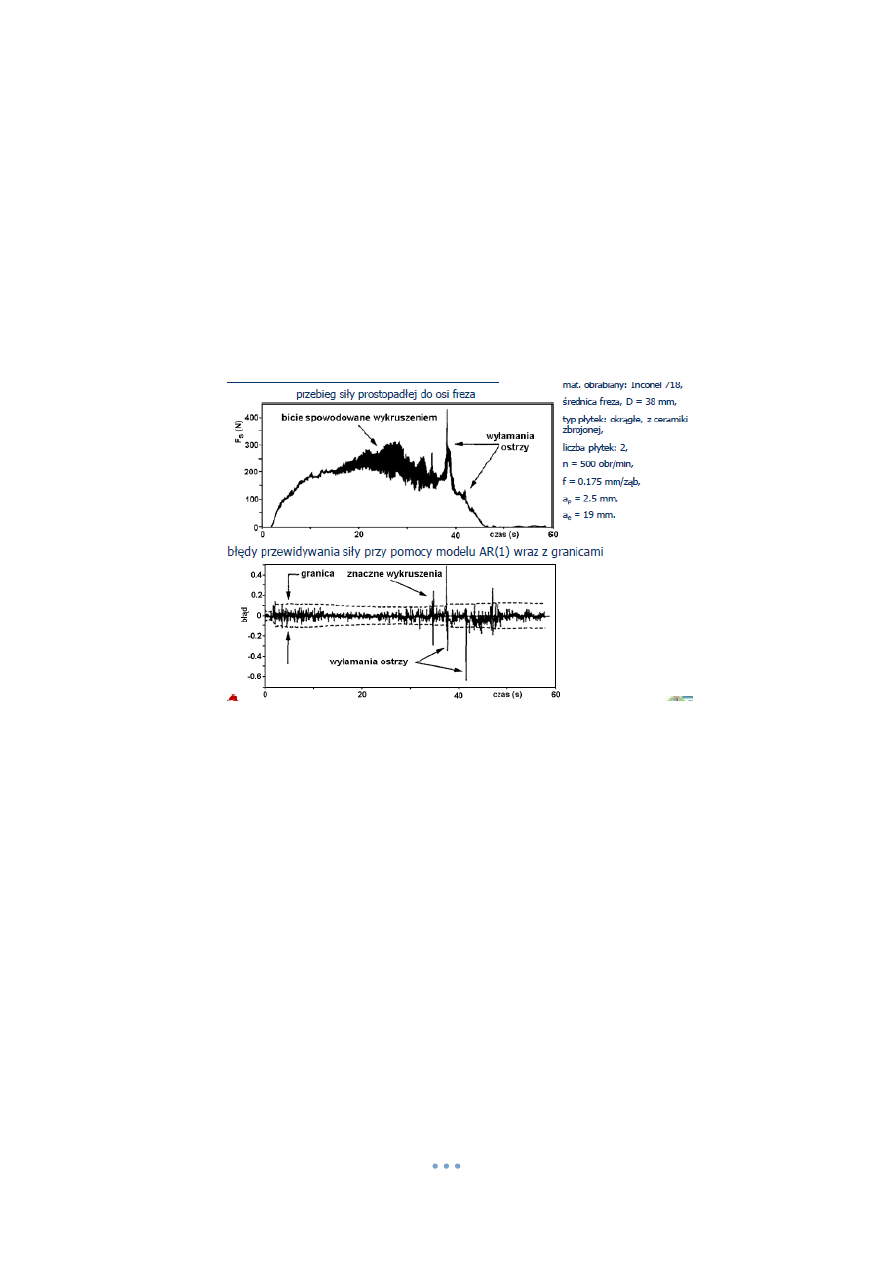
7. Wykrywanie KSO przy frezowaniu
Na powyższym rysunku przedstawiono strategie wykrywania KSO przy frezowaniu opartą na
śledzeniu błędów przewidywania przebiegu siły Fs prostopadłej do osi frezu za pomocą modelu
autoregresji pierwszego rzędu. Siłę tę wyznaczono jako pierwiastek sumy kwadratów sił
mierzonych siłomierzem w dwóch osiach Fx i Fy.
Wykruszenia, a tym bardziej wyłamania powodują nagłe zmiany w powtarzalnym przebiegu
śledzonej siły. Chwilowy znaczny wzrost błędu przewidywania przekraczający bezwładne granice
może byd wykorzystywany jako sygnał KSO.
35
W tym rozwiązaniu śledzona cecha sygnału jest szczególnie wrażliwa na zmiany przebiegu
sygnału towarzyszące KSO, przy czym tym razem nie jest on uśredniany co jedno przejście ostrza.
Wykrycie KSO następuje w ciągu 5ms od jego rzeczywistego wystąpienia. Wzmocnienie sygnału
jest automatycznie dopasowywane do różnych rzeczywistych wartości siły w celu utrzymania go
na poziomie najbardziej odpowiednim do zastosowanego algorytmu. Dzięki temu układ może
monitorowad zarówno duże narzędzia wykonujące obróbkę zgrubną, jak i małe narzędzia
wykaoczające, na zupełnie różnych obrabiarkach, bez ręcznego ustawiania układu czy fazy
uczenia.
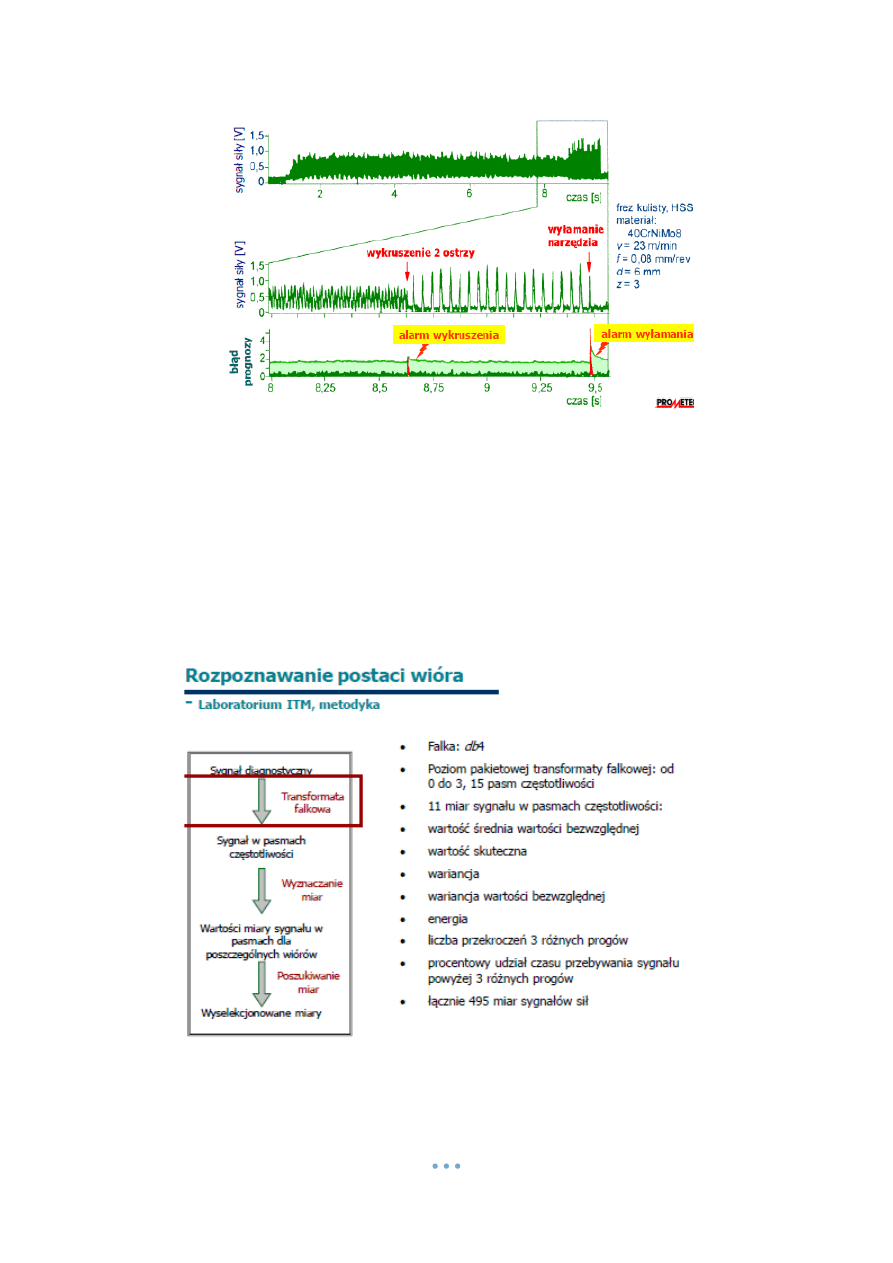
8. Rozpoznawanie postaci wióra z wykorzystaniem transformaty falkowej sygnału sił
Wyszukiwarka
Podobne podstrony:
drugi kolos z zabytków, Archeologia, Archeologia Pradziejowa, materiały na kolosy
Drugi Kolos
drugi kolos z zabytków
zadania msg licencjat, Studia, Makroekonomia, drugi kolos, SORDYL
makro3 bezrobocie, Studia, Makroekonomia, drugi kolos
DeterminantyRomer, Studia, Makroekonomia, drugi kolos
drugi kolos makro
Kolos, Studia, Makroekonomia, drugi kolos, SORDYL
MSG DRUGI KOLOS
drugi kolos Gałaj
drugi kolos z zabytków, Archeologia, Archeologia Pradziejowa, materiały na kolosy
kolos 2, studia, studia I rok, z dziennych od Majki, drugi semestr, chemia, chemiczna analiza instru
kolos drugi
przemyslowe kolos 1 id 405455 Nieznany
kolos 1
(subsydia profesorskie po raz drugi) FLPELPZE34MTBQ3W3YL34RY5OCNVWBTZZH5FFAA
bezp kolos id 83333 Nieznany (2)
więcej podobnych podstron