1
5. Ruch w układach inercjalnych i nieinercjalnych. Siły pozorne.
Układ odniesienia - punkt lub układ punktów w przestrzeni, względem którego określa się położenie
lub zmianę położenia (ruch) wybranego ciała. Wybrany punkt często wskazuje się poprzez wskazanie
ciała, z którym związany jest układ współrzędnych.
Wybór układu odniesienia jest koniecznym warunkiem opisu ruchu lub spoczynku. Układ odniesienia
można wybrać dowolnie, tak, by wygodnie opisać ruch.
Układ inercjalny – w takim układzie jest spełniona pierwsza zasada dynamiki(Jeśli na ciało nie działa
żadna siła lub działają siły równoważące się to pozostaje ono w spoczynku lub porusza się ruchem
jednostajnym prostoliniowym.). Obiekt obserwowany w inercjalnym układzie odniesienia nie zmieni
swego stanu samoistnie. Zmieni go tylko wtedy, gdy będzie na niego działała jakaś różna od zera
wypadkowa siła.
Inaczej:
Układ inercjalny - układ odniesienia, względem którego każde ciało niepodlegające zewnętrznemu
oddziaływaniu z czymkolwiek porusza się bez przyspieszenia (tzn. ruchem jednostajnym
prostoliniowym). Istnienie takiego układu jest postulowane przez pierwszą zasadę dynamiki Newtona.
Zgodnie z zasadą względności Galileusza wszystkie inercjalne układy odniesienia są
równouprawnione i wszystkie prawa mechaniki są w nich identyczne. Identyczne są również
wszystkie prawa fizyki w układach inercjalnych.
Układ nieinercjalny- w takim układzie nie jest spełniona pierwsza zasada dynamiki. W takim układzie
działają siły bezwładności.
Układ nieinercjalny to układ odniesienia, którego wektor prędkości zmienia się, czyli taki, który ma
niezerowe przyspieszenie. Wektor prędkości może zmieniać tylko swoją wartość (ruch przyspieszony
po linii prostej), tylko kierunek (ruch po okręgu) lub w najogólniejszym przypadku kierunek i wartość
Siły pozorne – wyprowadzenie(na końcu opis poszczególnych sił pozornych)
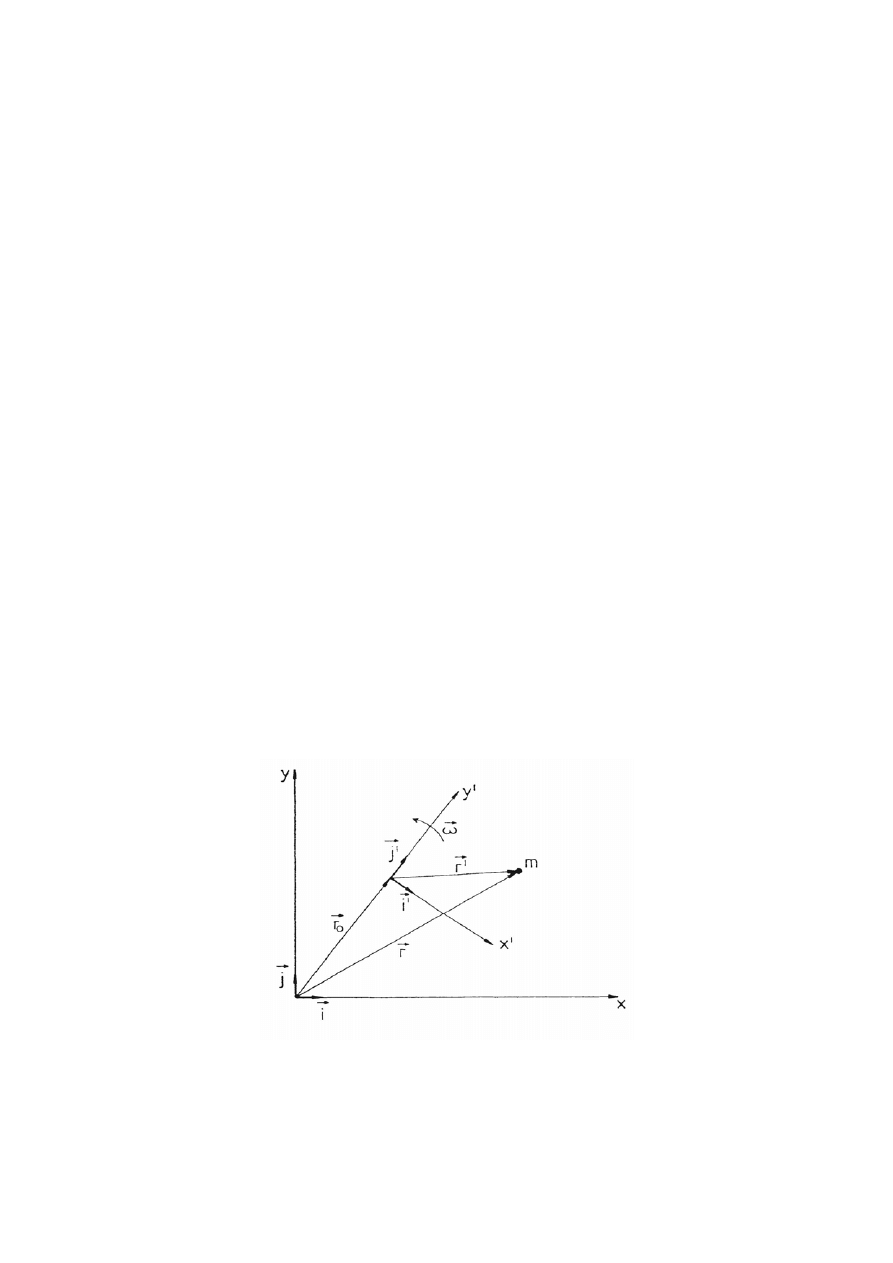
Rysunek przedstawia położenie cząstki m w pewnej wybranej chwili t. Opis położenia cząstki w
układzie inercjalnym XOY jest możliwy za pomocą wektora r (patrz oznaczenia poniżej) lub w
układzie nieinercjalnym X'O'Y', który może poruszać się z przyspieszeniem liniowym i wirować za
pomocą wektora r
'
(patrz oznaczenia poniżej). Dla uproszczenia rachunków przyjęliśmy, że ruch jest
płaski, a więc obrót układu X'O'Y' odbywa się w płaszczyźnie XOY.
2
Przyjęte oznaczenia:
r - wektor wodzący cząstki opisujący jej położenie w układzie inercjalnym (zewnętrznym), XOY
r
'
- wektor wodzący cząstki opisujący jej położenie w układzie nieinercjalnym
r
0
- wektor łączący początki obu układów od punktu O w układzie inercjalnym XOY do punktu O' w
układzie nieinercjalnym X'O'Y', który może poruszać się z przyspieszeniem liniowym i wirować
W każdym momencie, a więc i w chwili t zachodzi związek wektorowy:
r = r
'
+ r
o
Zgodnie z definicją wektora prędkości v cząstki m w układzie XOY:
t
y
t
t
dt
t
(t)
/
d
d
t
d
d
y
dt
dy
t
d
d
x
+
t
d
x
d
t
d
)
d(x
d
d
d
d
d(
d
d
/
/
/
/
/
/
0
/
/
0
/
r
j
i
r
r
r
r
v
+
+
+
=
+
=
+
=
+
=
=
/
/
/
/
j
j
i
i
)
0
r
Grupując odpowiednio wyrażenia otrzymamy:
• w pierwszym nawiasie - prędkość cząstki mierzoną w układzie X'O'Y' czyli v
/
• w drugim nawisie - efekt obrotu układu X'O'Y'
• pochodna wektora r
0
jest
prędkość liniową początku układu X'O'Y' względem punktu O
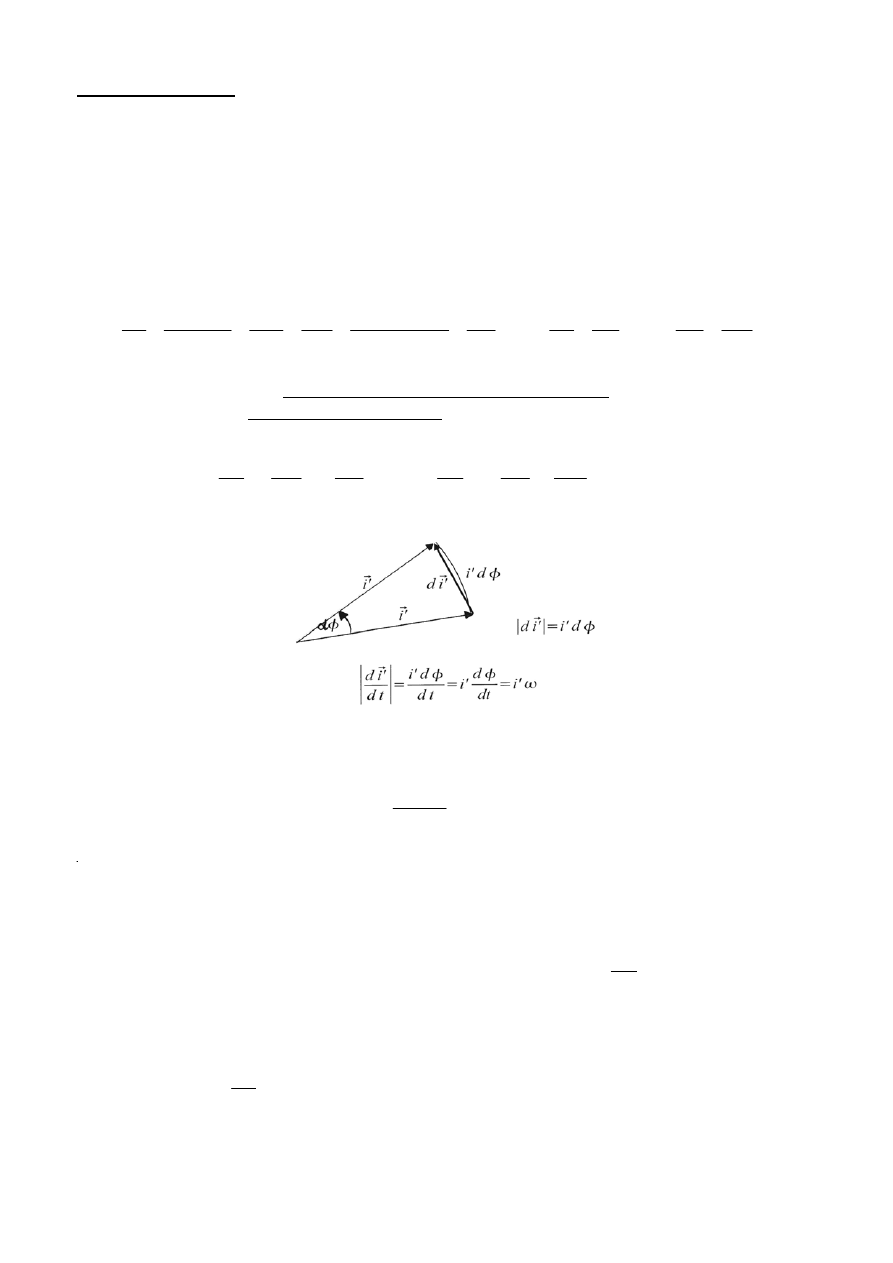
Ponieważ układ X'O'Y' wiruje to pochodna wersora osi 'O'X ' i
'
nie znika i musimy ją obliczyć.
Na rysunku obok naszkicowane jest położenie wersora i
'
układu wirującego w chwili t oraz bardzo
blisko po niej następującej chwili t+dt. Po obrocie w czasie dt o granicznie mały kąt dωdługość łuku,
który zakreślił wersor jest równa dωponieważ długość tego wersora wynosi 1. W przypadku
dowolnie małego czasu dt długość łuku i cięciwy są sobie równe, mamy stąd wielkość
przemieszczenia wersora i
'
układu wirującego oraz długość wektora t
d
d
/
i
(patrz na podpisy pod
rysunkiem). Potrzeba nam jeszcze informacji o jego kierunku.
W tym celu pokażę, że wektor równy pochodnej po czasie obracającego się dowolnego wektora A o
stałej długości, czyli dt
dA
jest do wektora A prostopadłe.
Obliczmy iloczyn skalarny:
A
A o = A
2
. Jest to pewna stała w czasie wartość. Wynika stąd, że jej
pochodna po czasie musi być zerem. Z drugiej strony można formalnie policzyć pochodną iloczynu
dwóch funkcji czasu
A oraz A:
t
d
d
/
i
/
0
d i
d t
→
≠
t
t
(t)
d
d
t
d
d
y
t
d
d
x
dt
dy
+
t
d
x
d
d
d
/
/
/
/
0
r
r
v
+
⎥
⎦
⎤
⎢
⎣
⎡
+
+
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
=
=
/
/
/
/
j
i
j
i
3
A
A
A
A
A
A
A)
A
o
o
o
o
t
d
d
2
t
d
d
t
d
d
(
t
d
d
=
+
=
Ponieważ wektor A miał stałą długość, to:
( )
0
t
d
A
d
(
t
d
d
2
=
=
A)
A o
Porównując prawe strony tych przekształceń otrzymamy w wyniku:
Ponieważ wektor A nie był wektorem zerowym (miał różną od zera długość), oraz jego pochodna
0
dt
d ≠
A
to te wektory są do siebie prostopadłe. Ta sama zależność ma miejsce dla wektorów o
długości jednostkowej - wersorów. Stąd wynika zależność:
czyli pochodna (wersora osi 'O'X ' ) i
'
ma kierunek wersora osi O'Y', czyli kierunek j' .
Podobne rozumowanie dla wersora osi O'Y' prowadzi do wyniku:
W oparciu o analizę ruchu obrotowego wersorów (patrz ruch obrotowy - omówienie na wykładzie
związku: v=
=
t
d
dr
ω
r
×
gdzie r jest wektorem obracającym się o stałej długości) możemy znaleźć
następujące zależności:
/
/
i
i
×
=
ω
t
d
d
/
/
j
j
×
=
ω
dt
d
(ponieważ wersory te są to to też wektory obracające się o stałej długości).
Powracając do wzoru:
otrzymamy po zastosowaniu związków dla pochodnych wersorów:
[
]
t
d
d
y
x
dt
dy
+
t
d
x
d
(t)
/
/
/
/
0
r
+
×
+
×
+
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
=
/
/
/
/
i
i
j
i
ω
ω
v
[
]
t
d
d
)
y
x
(
dt
dy
+
t
d
x
d
(t)
/
/
/
/
0
r
+
+
×
+
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
=
/
/
/
/
i
i
j
i
ω
v
0
t
d
d
2
=
A
A
o
/
/
j
i
ω
=
t
d
d
/
/
i
j
ω
−
=
t
d
d
t
t
(t)
d
d
t
d
d
y
t
d
d
x
dt
dy
+
t
d
x
d
d
d
/
/
/
/
0
r
r
v
+
⎥
⎦
⎤
⎢
⎣
⎡
+
+
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
=
=
/
/
/
/
j
i
j
i
[
]
t
t
(t)
d
d
y
x
dt
dy
+
t
d
x
d
d
d
/
/
/
/
0
r
r
v
+
×
+
×
+
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
=
=
/
/
/
/
i
i
j
i
ω
ω
4
Oznaczmy przez:
/
/
j
i
dt
dy
+
t
d
x
d
d
/
/
/
=
=
t
(t)
r
v
/
δ
,
gdzie symbolem
t
d
/
r
δ
oznaczona jest prędkość cząstki m w układzie X'O'Y'.
Zauważmy również, że: r' = x' i' + y' j'. Możemy napisać więc następujący związek dla prędkości v.
Przypomnijmy, że na początku tego rozumowania obliczaliśmy:
t
t
dt
t
(t)
d
d
d
d
d(
d
d
/
0
/
r
r
r
r
v
+
=
+
=
=
)
0
r
Widać więc, że otrzymaliśmy związek pochodnej wektora r' obliczanej w układzie XOY, czyli
t
d
d
/
r
z pochodną tego wektora liczoną w układzie X'O'Y' oznaczoną jako
t
d
/
r
δ
.
Zależność tę można zapisać teraz tak:
/
r
×
+
=
ω
t
t
d
d
d
/
r
r
/
δ
Przedstawiona w ramce zależność jest słuszna dla dowolnej wielkości wektorowej, ponieważ nie
wykorzystaliśmy nigdzie w powyższym rozumowaniu faktu, że jest to właśnie transformacja
położenia. Formalnie można więc zastąpić we wzorze w ramce wektor położenia wektorem prędkości
v':
/
v
×
+
=
ω
t
t
d
d
d
/
v
v
/
δ
Otrzymaliśmy związek, który pokazuje jak transformuje się pochodna wektora przy przejściu z układu
XOY do układu X'O'Y'.
Możemy teraz podać związek prędkości punktu m w obu układach:
Napiszmy ten związek jeszcze raz:
o
v
ω
v
+
×
+
=
/
/
r
v
Ponownie należy podkreślić, że jest to związek słuszny w dowolnej chwili t, a więc zawsze.
Można wprowadzić pojęcie prędkości unoszenia układu:
o
u
v
ω
v
+
×
=
/
r
, wtedy
u
v
v +
=
/
v
.
t
t
t
(t)
d
d
d
d
d
/
0
r
r
r
v
+
×
+
=
=
/
r
ω
δ
o
v
ω
v
ω
+
×
+
=
+
×
+
=
=
/
/
/
r
r
t
t
t
(t)
d
d
d
d
d
/
0
r
r
r
v
δ
5
Obliczenie przyspieszenia:
W układzie XOY mamy związek:
(
)
(
)
t
d
d
t
d
d
t
d
d
t
d
d
t
d
d
o
o
v
ω
v
v
ω
v
v
+
×
+
=
+
×
+
=
=
/
/
/
/
r
r
a
. Korzystając ze związku na transformację
wektora prędkości:
/
v
×
+
=
ω
t
t
d
d
d
/
v
v
/
δ
i obliczając pochodną iloczynu wektorowego
(
)
/
r
×
ω
t
d
d
otrzymamy:
t
d
d
t
d
d
t
d
d
d
t
d
d
/
o
v
ω
ω
ω
v
a
+
×
+
×
+
×
+
=
=
/
/
/
r
r
v
t
v
δ
Ponieważ wiemy, że:
/
r
×
+
=
ω
t
t
d
d
d
/
r
r
/
δ
to
t
d
d
d
t
d
d
d
t
d
d
/
/
o
v
ω
ω
ω
ω
v
a
+
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
×
+
×
+
×
+
×
+
=
=
/
/
/
r
r
v
t
t
r
v
δ
δ
.
Uwzględniając:
związek dla przyspieszenia cząstki m widzianego przez obserwatora w układzie X'O'Y':
dt
δv
a
′
=
′
Przyspieszenie układu X'O'Y' względem układu XOY:
Przyspieszenie kątowe układu wirującego X'O'Y':
Zależność podwójnego iloczynu wektorowego (bez dowodu):
(
)
/
/
r
r
2
-
ϖ
=
×
× ω
ω
Otrzymamy:
0
/
a
ω
a
a
+
−
×
+
×
+
=
/
/
/
r
r
v
2
2
ϖ
ε
Chcemy znaleźć przyspieszenie w układzie X'O'Y', tak więc przekształcamy nasz wynik:
0
/
a
ω
a
a
−
+
×
−
×
−
=
/
/
/
r
r
v
2
2
ϖ
ε
Mnożąc wyrażenie przez masę cząstki uzyskujemy wyrażenie na siły działającą na cząstkę w obu
układach odniesienia:
0
/
a
ω
a
a
m
m
m
m
2
m
2
−
+
×
−
×
−
=
/
/
/
r
r
v
ϖ
ε
m
Widać, że obok zwykłej siły równej ma znanej z układu inercjalnego otrzymaliśmy cztery nowe siły
zwane pozornymi, bo wynikają one z wyboru układu współrzędnych, nie zaś z fundamentalnych
oddziaływań w przyrodzie .
t
d
d
0
r
=
o
a
t
d
d
ω
ε =

6
Cztery siły pozorne, które pojawiają się w ostatnim równaniu to:
• siła bezwładności ruchu postępowego: F
b
= m(-a
0
) . Występuje ona zawsze gdy układ
odniesienia porusza się ruchem postępowym z przyspieszeniem a
0
względem inercjalnego
układu odniesienia
• siła odśrodkowa bezwładności: F
od
= mω
2
r. Do jej pojawienia się konieczny jest układ
odniesienia, który obraca się względem inercjalnego układu odniesienia z prędkością kątową
• siła bezwładności ruchu obrotowego: F
b obr
=
m (-
/
r
×
ε
). Tu niezbędne jest aby układ
odniesienia obracał się względem inercjalnego układu odniesienia ze zmienną w czasie
prędkością kątową Wtedy przyspieszenie kątowe jest niezerowe i występuje pozorna siła
styczna do toru w ruchu obrotowym.
• siła Coriolisa: F
C
=
/
v
×
−
ω
m
2
.
Aby można ją było zaobserwować cząstka musi poruszać się
z niezerową prędkością w nieinercjalnym układzie odniesienia, który obraca się względem
inercjalnego układu odniesienia z prędkością kątową a ponadto wektor prędkości cząstki nie
jest równoległy do osi obrotu układu odniesienia
Wyszukiwarka
Podobne podstrony:
Wykł 05 Ruch drgający
Kurs 05 Ruch drgający
Wyklad-10 ruch w ukladach nieinercjalnych
05 ruch drgajacy w
05 ruch drgajacy w
87 Nw 05 Kostka ukladanka id 47 Nieznany (2)
Wykł 05 Ruch drgający
Ruch w układach nieinerjalnych
87 Nw 05 Kostka ukladanka
05 Dynamika ruchu postepowego i po okregu Ruch obrotowy bryly sztywnej
05 Sprawozdanie z rownowag w ukladach heterogenicznych (1)
05 Br Roberts Ruch, Zbór, Jednostka
podrecznik 2 18 03 05
regul praw stan wyjątk 05
prezentacja Ruch konsumencki
więcej podobnych podstron