7.WŁAŚCIWOŚCI
7.WŁAŚCIWOŚCI LEPKOSPRĘŻYSTE
LEPKOSPRĘŻYSTE
POLIMERÓW
POLIMERÓW
dr hab. inż. Józef Haponiuk
Katedra Technologii Polimerów
Wydział Chemiczny PG
Politechnika Gdaoska, 2011 r.
Publikacja współfinansowana
ze środków Unii Europejskiej
w ramach Europejskiego Funduszu Społecznego
WŁAŚCIWOŚCI LEPKOSPRĘŻYSTE POLIMERÓW
Polimery mają właściwości ciała lepkosprężystego, tzn. że pod wpływem sił
zewnętrznych odkształcają się sprężyście (odwracalnie) i niesprężyście
(nieodwracalnie), zależnie od czasu — płynięcie.
Zachowanie
sprężyste
Zachowanie
lepkie
2

WŁAŚCIWOŚCI LEPKOSPRĘŻYSTE POLIMERÓW
Polimery (jak również inne realne ciała) odkształcają się pod
wpływem zewnętrznych sił w skończonym czasie.
Nauka o tych zjawiskach zwana
reologią
obejmuje analityczny opis
ruchów jednych elementów ciała względem innych na poziomie
zarówno
makro-
(makroreologia)
jak
i
mikroskopowym
(mikroreologia).
W zakresie pojęcia makroreologia mieszczą się rozważania i sposoby
opisu realnych ciał w skali makro-, wynikające z koncepcji ciała jako
pewnego kontinuum materii, bez uwzględniania jego struktury
molekularnej.
3
WŁAŚCIWOŚCI LEPKOSPRĘŻYSTE POLIMERÓW
Mikroreologia
zajmuje
się
poznaniem
zależności
między
mikroskopową strukturą materiału a właściwościami reologicznymi
zarówno w stanie stałym, jak i stopionym.
Polimery (materiały) są ciałami stałymi o właściwościach
lepkosprężystych
(tj.ciałami stałymi, które podczas odkształcenia
mają właściwości lepkie w wyniku rozproszenia energii)
lub cieczami lepkosprężystymi
(tj. lepkimi płynami-cieczami, które
mają właściwości sprężyste).
4
W
ŁAŚCIWOŚCI
LEPKOSPRĘŻYSTE
POLIMERÓW
Odkształcenia polimerów pod wpływem naprężeń mogą być:
•sprężyste
•plastyczne
•lub lepkie (przepływ).
W realnych ciałach procesy odkształcania są bardzo złożone i zależą od
takich czynników, jak rodzaj naprężenia, szybkość obciążania lub czas
działania obciążenia.
Do ich opisu służą różne modele, np. mechaniczne, elektryczne itp.,
które symulują układy lepkosprężyste.
5

W
ŁAŚCIWOŚCI
LEPKOSPRĘŻYSTE
POLIMERÓW
Materialne układy reologiczne można podzielić pod względem
odkształcenia przy uwzględnieniu czasu na proste liniowe, proste
nieliniowe, złożone liniowe i złożone nieliniowe.
Do układów
prostych liniowych
zalicza się ciała idealnie sprężyste
spełniające prawo Hooke‘a:
(odkształcenie jest liniową funkcją naprężenia i nie zależy od szybkości
odkształcania, tj. od czasu
)
oraz ciała idealnie lepkie spełniające prawo Newtona:
(prędkość odkształcenia jest liniową funkcją naprężenia i nie zależy od
samego odkształcenia)
.
Do układów
prostych nieliniowych
zalicza się ciała, dla których
zależność odkształcenia (lub szybkości odkształcenia) od naprężenia jest
funkcją nieliniową (najczęściej wykładniczą).
6

W
ŁAŚCIWOŚCI
LEPKOSPRĘŻYSTE
POLIMERÓW
Do układów
złożonych liniowych
zalicza się ciała, dla których
odkształcenie zależy liniowo od naprężenia i jednocześnie od prędkości
odkształcania oraz od wyższych pochodnych odkształceń lub naprężeń
względem czasu. Układy te podlegają prawu superpozycji Boltzmanna.
Do układów
złożonych nieliniowych
zalicza się ciała wykazujące zarówno
anomalia czasowe jak też naprężeniowe odkształceń.
Układy złożone liniowe i nieliniowe są układami lepkosprężystymi.
7
W
ŁAŚCIWOŚCI
LEPKOSPRĘŻYSTE
POLIMERÓW
–
MODELE
MECHANICZNE
Modele mechaniczne ciał lepkosprężystych działają na zasadzie prostych modeli
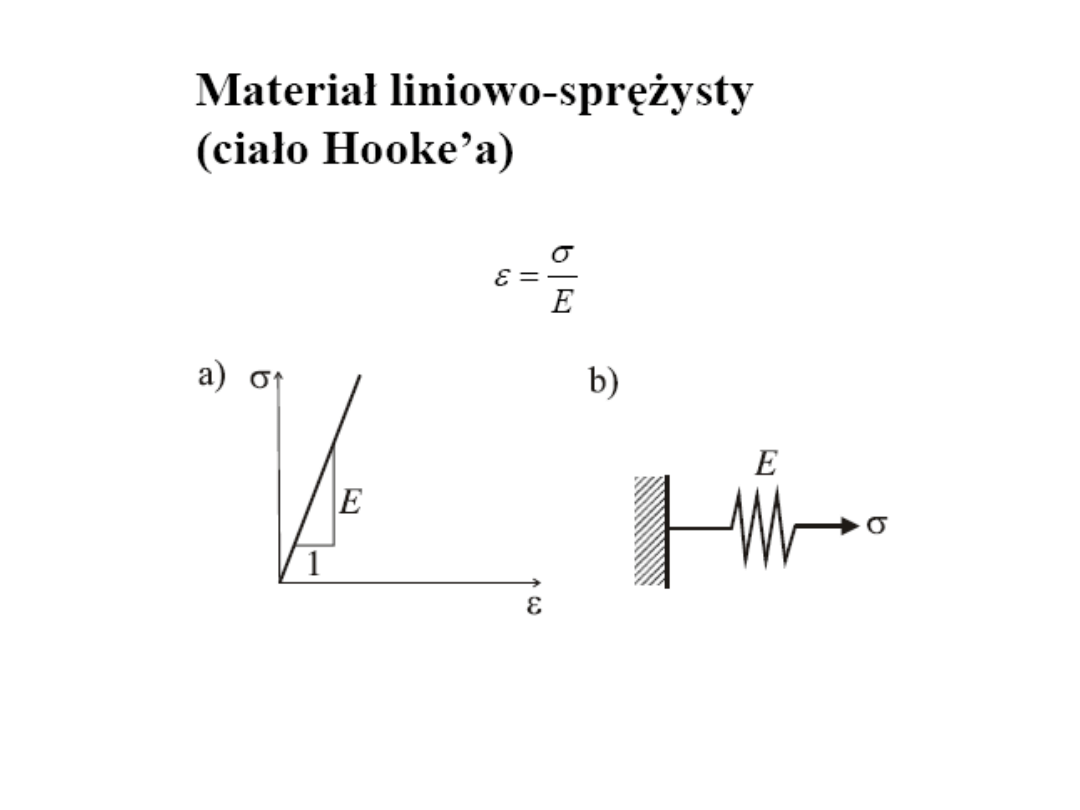
opisujących ciała idealnie sprężyste (ciało Hooke'a), idealnego płynu (ciało
Newtona) oraz ciała idealnie plastycznego (St.Venanta).
Prawo Hooke'a — odkształcenie g lub e ciała idealnie sprężystego jest
proporcjonalne do przyłożonego obciążenia F wywołującego naprężenia
t (lub s), zgodnie z równaniem stanu ciała liniowo-sprężystego.
gdzie: G — moduł sprężystości
postaciowej (Kirchhoffa),
E — moduł sprężystości podłużnej
(Younga),
t = F/A — naprężenie,
A — powierzchnia przekroju badanej
próbki.
g
8
9
10
11
12
13
W
ŁAŚCIWOŚCI
LEPKOSPRĘŻYSTE
POLIMERÓW
–
MODELE
MECHANICZNE
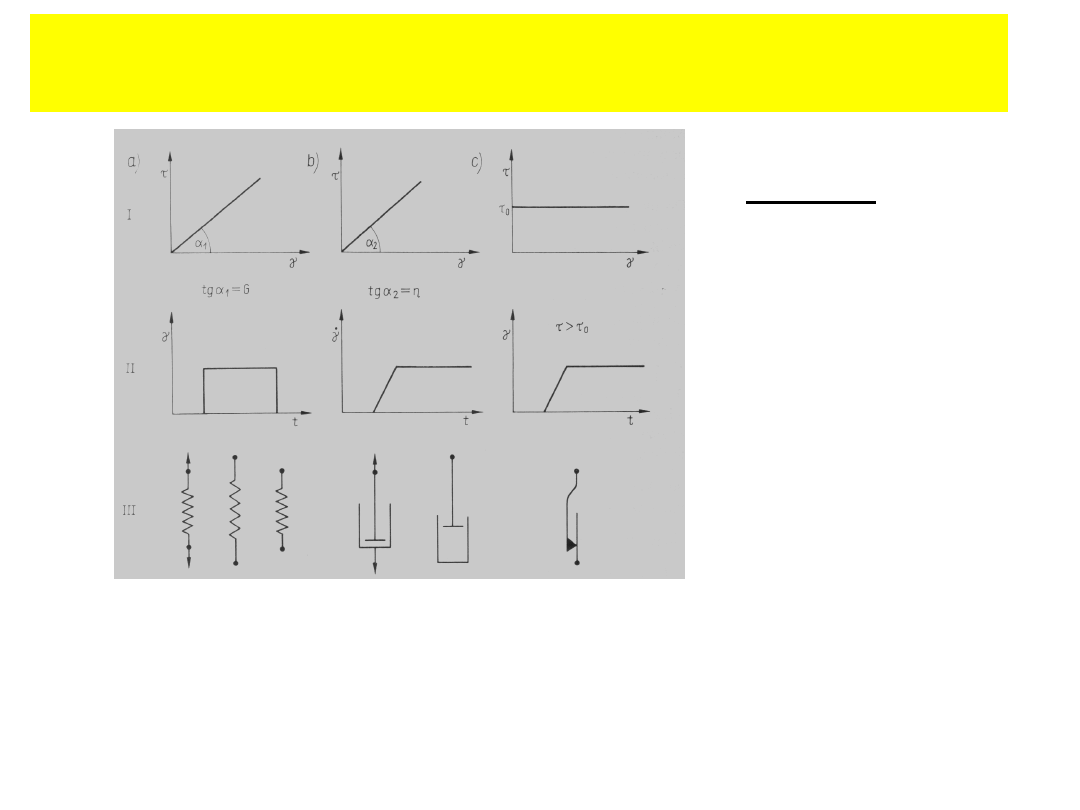
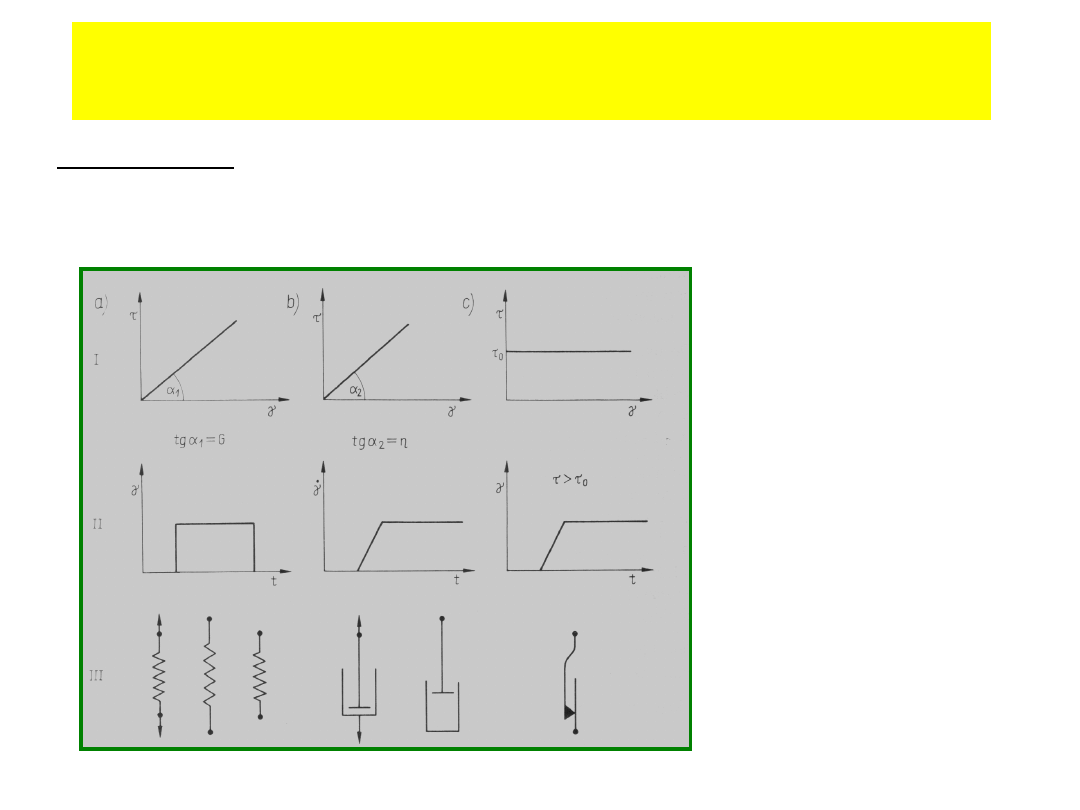
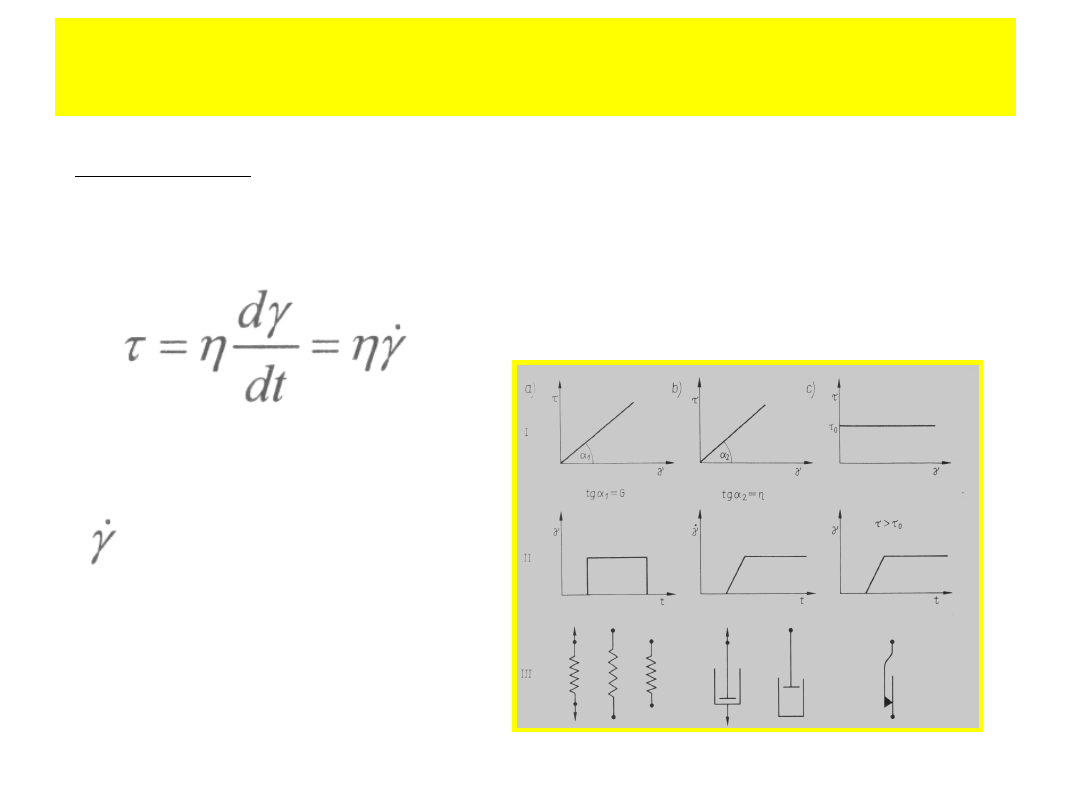
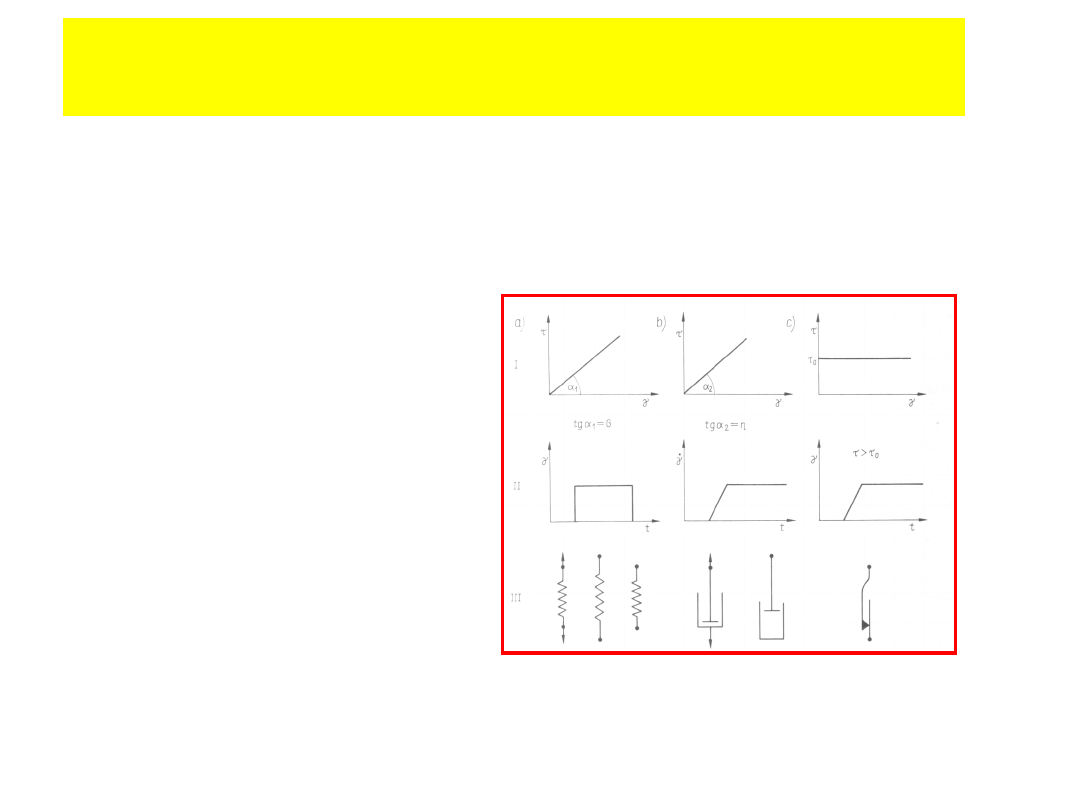
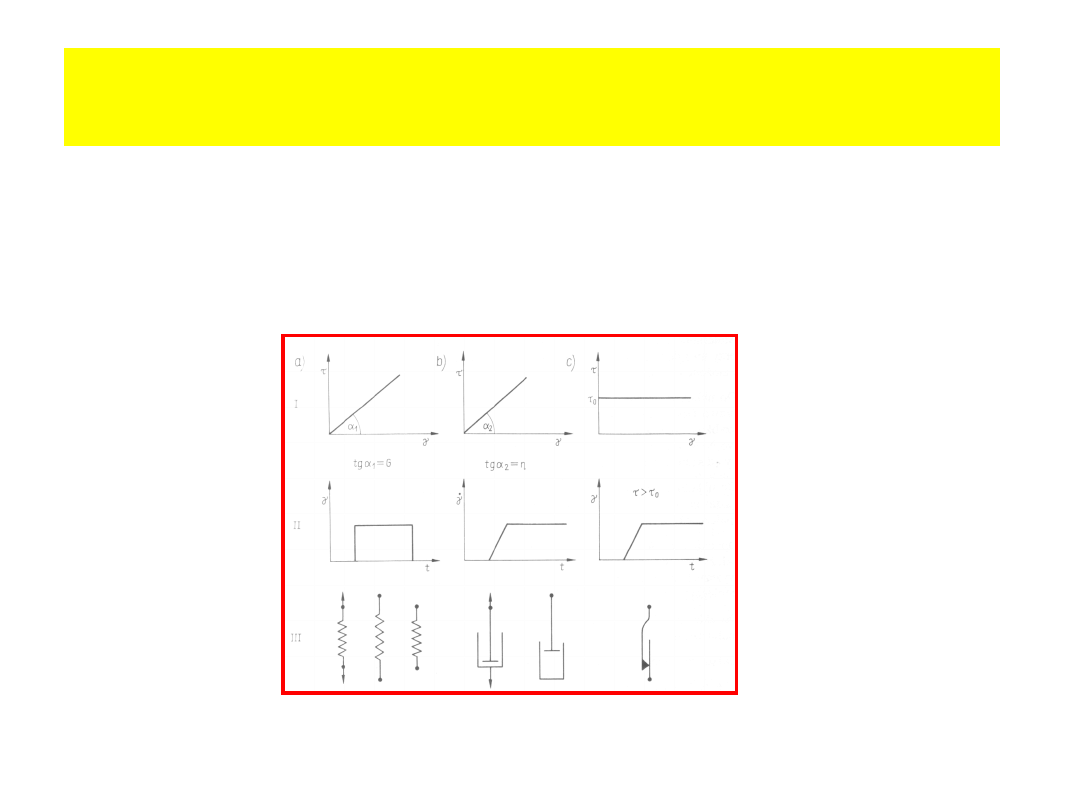
III — modele mechaniczne
a) ciało idealnie sprężyste
b) ciało idealnie lepkie
(płyn)
c) ciało idealnie plastyczne
Zależności:
I — naprężenia t od
odkształcenia g
II — odkształcenia
g
od czasu t
14
W
ŁAŚCIWOŚCI
LEPKOSPRĘŻYSTE
POLIMERÓW
–
MODELE
MECHANICZNE
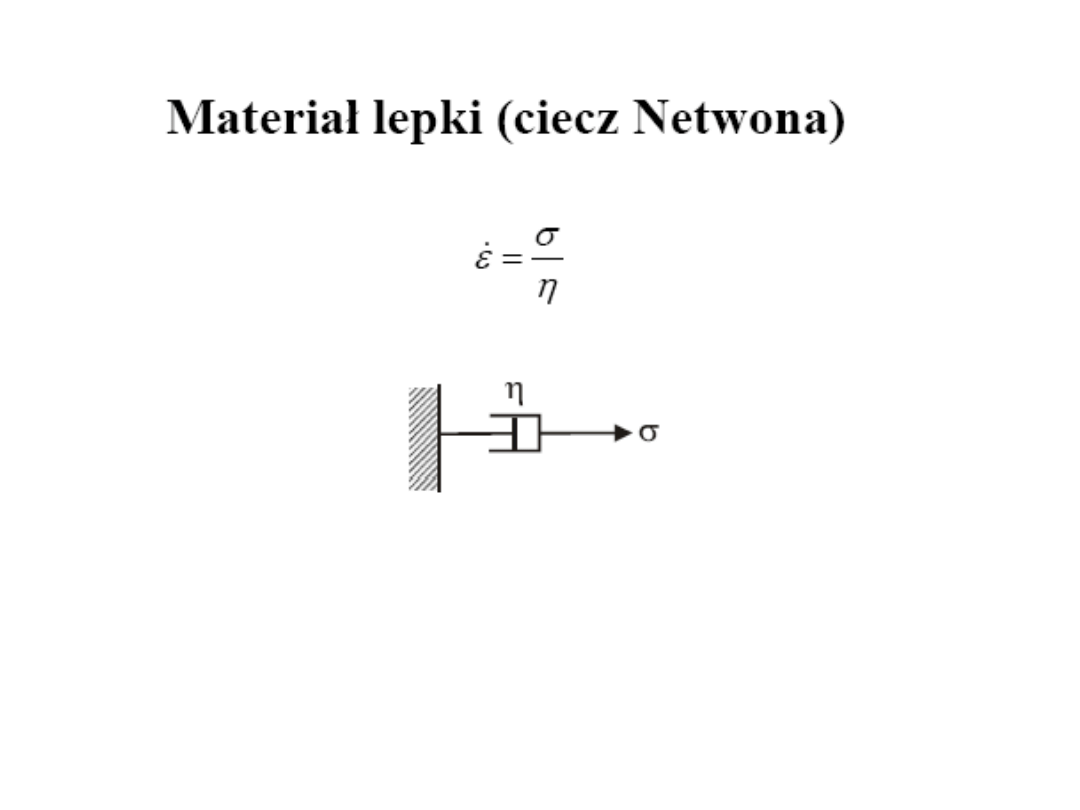
Prawo Newtona — odkształcenie ciała idealnie lepkiego zmienia się liniowo w czasie
pod wpływem działania naprężenia t i jest opisane równaniem stanu płynów liniowo-
lepkich (zwanych również cieczami newtonowskimi) .
15
W
ŁAŚCIWOŚCI
LEPKOSPRĘŻYSTE
POLIMERÓW
–
MODELE
MECHANICZNE
Prawo Newtona — odkształcenie ciała idealnie lepkiego zmienia się liniowo w czasie
pod wpływem działania naprężenia t i jest opisane równaniem stanu płynów liniowo-
lepkich (zwanych również cieczami newtonowskimi) .
h — lepkość postaciowa
—
prędkość ścinania
16
W
ŁAŚCIWOŚCI
LEPKOSPRĘŻYSTE
POLIMERÓW
–
MODELE
MECHANICZNE
Modelem ciała idealnie lepkiego jest tłumik hydrauliczny. Podczas działania
naprężenia odkształcenie zmienia się w czasie (t), lecz po odjęciu obciążenia ciało nie
wraca do pierwotnego stanu; odkształcenie jest nieodwracalne — trwałe
17
W
ŁAŚCIWOŚCI
LEPKOSPRĘŻYSTE
POLIMERÓW
–
MODELE
MECHANICZNE
Odkształcenie ciała plastycznego następuje po przekroczeniu pewnej wartości
naprężenia (równej sile tarcia statycznego), jest stałe i po odjęciu naprężenia nie wraca
do pierwotnego stanu, a energia zostaje rozproszona i przemienia się w ciepło.
Modelem ciała idealnie plastycznego St. Venanta jest suwak.
18
W
ŁAŚCIWOŚCI
LEPKOSPRĘŻYSTE
POLIMERÓW
–
MODELE
MECHANICZNE
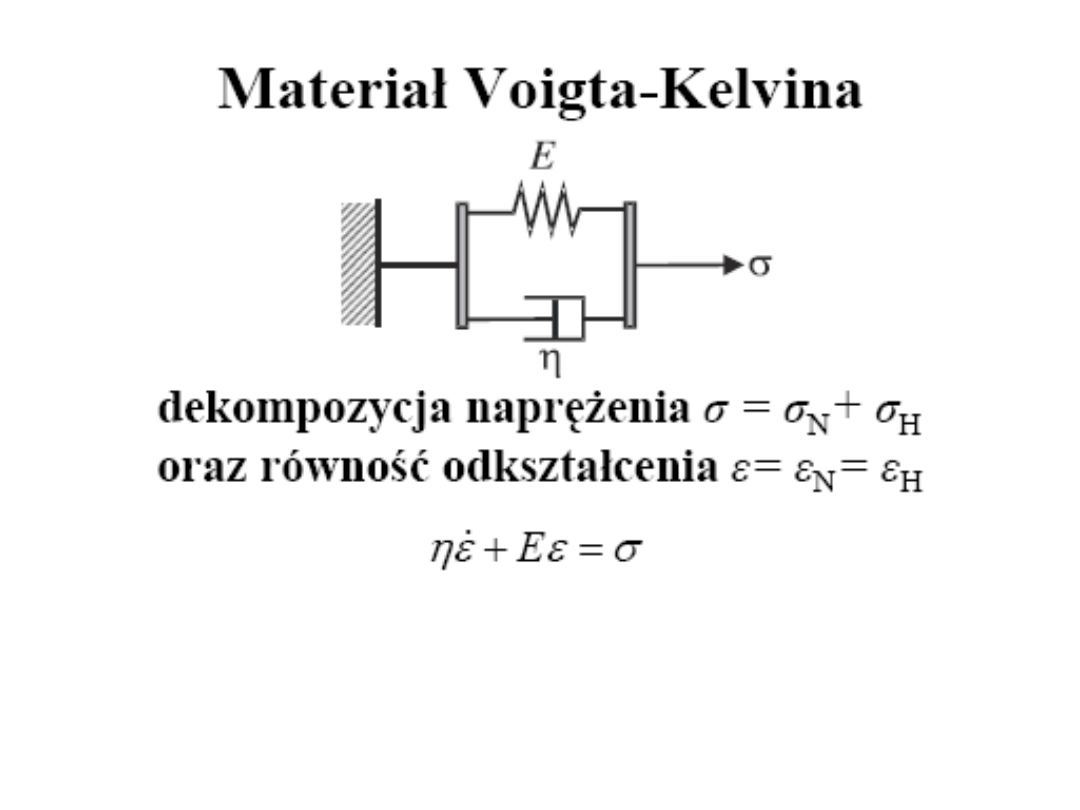
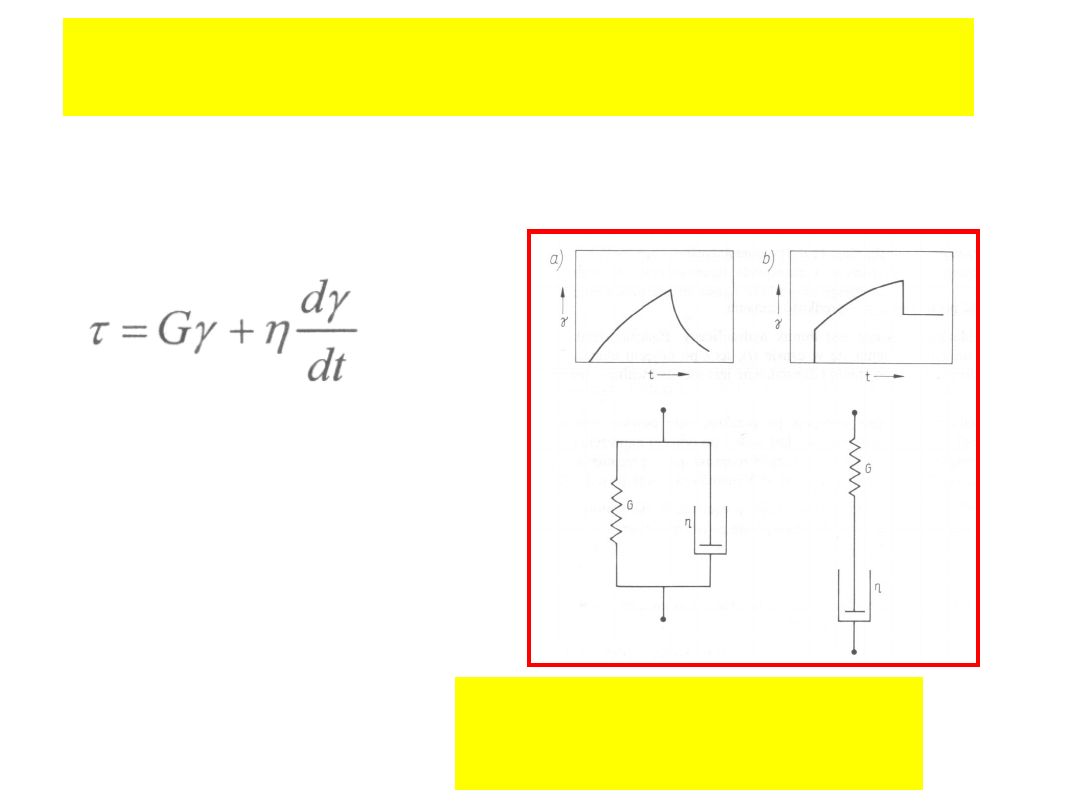
Model Voigta-Kelvina jest złożony z równolegle połączonych elementów modelu ciała
sprężystego i lepkiego opisuje go równanie stanu.
Pod
wpływem
naprężenia,
powstające
natychmiastowe
odkształcenie
powoduje,
że
odkształcenie całkowite jest
nieliniowe w czasie.
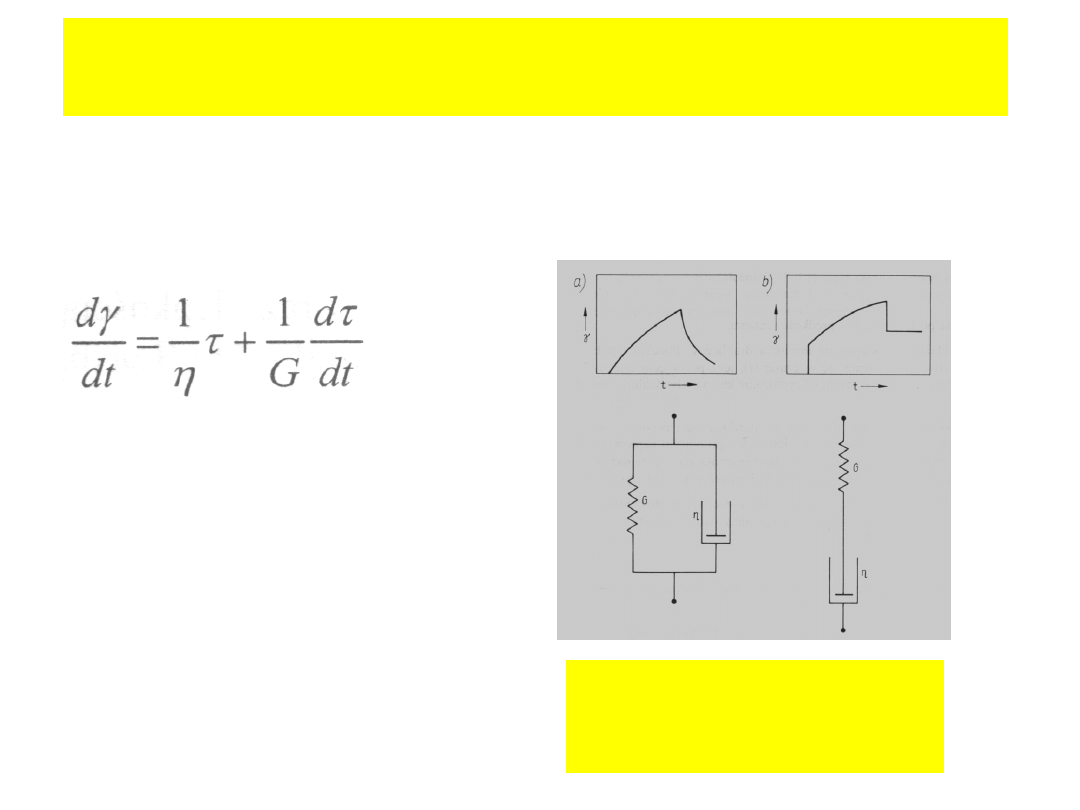
Modele ciał lepkosprężystych:
a) Voigta-Kelvina
b) Maxwella
19
W
ŁAŚCIWOŚCI
LEPKOSPRĘŻYSTE
POLIMERÓW
–
MODELE
MECHANICZNE
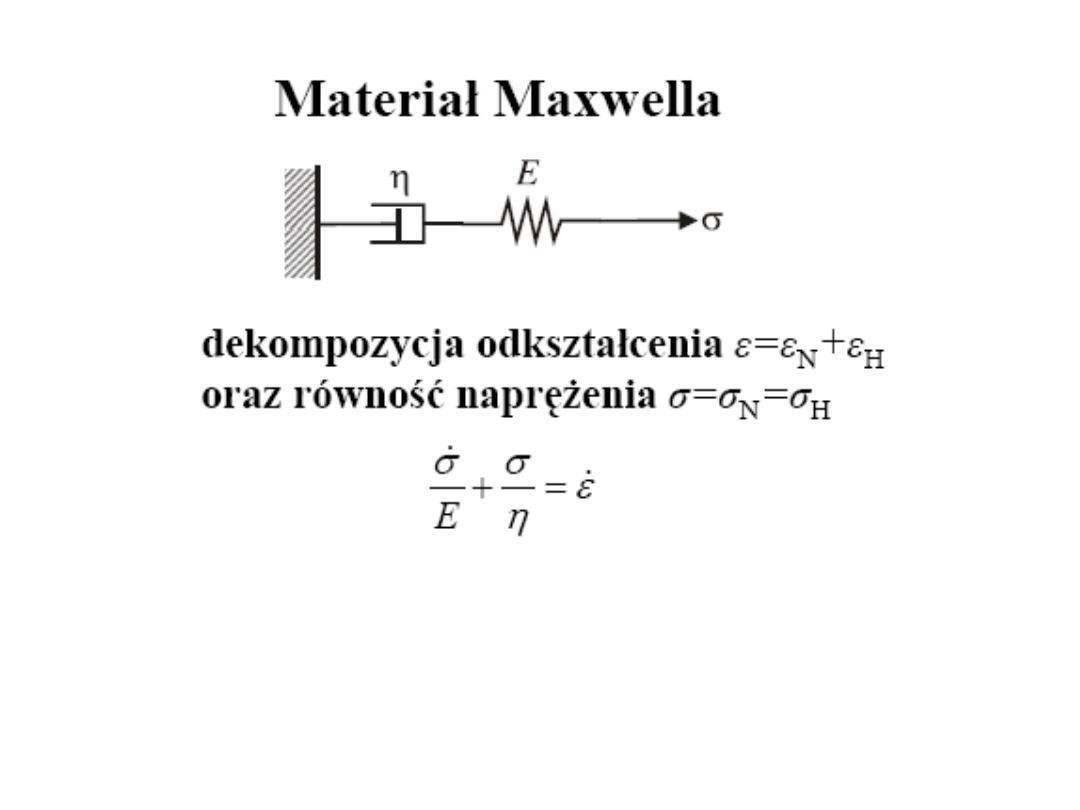
Model Maxwella jest złożony z szeregowo połączonych elementów ciała idealnie
sprężystego i lepkiego.
Odkształcenie układu opisuje równanie stanu:
Modele ciał lepkosprężystych:
a) Voigta-Kelvina
b) Maxwella
Działanie stałego naprężenia powoduje
natychmiastowe odkształcenie sprężyste,
a następnie układ zaczyna płynąć
nieograniczenie w sposób liniowy w
czasie t.
Po odjęciu obciążenia w układzie
pozostaje stałe odkształcenie.
20
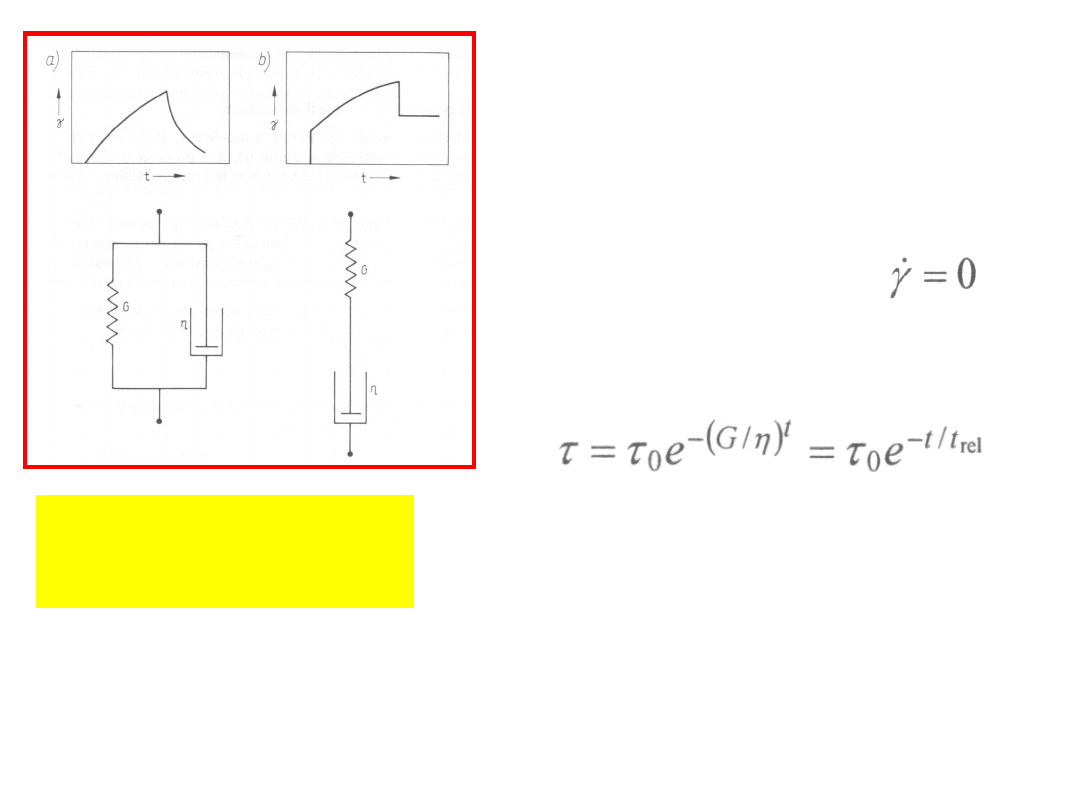
Modele ciał lepkosprężystych:
a) Voigta-Kelvina
b) Maxwella
Zachowanie się ciała
lepkosprężystego Maxwella zależy
od postaci funkcji tf(t) oraz gf(t)
Jeżeli odkształcenie jest stałe,
czyli gg
o
= const, oraz
To relaksacja naprężęń jest
opisana równaniem:
gdzie:
t
rel
= h/G - czas relaksacji
(zanikania, odprężenia)
naprężeń, po upływie którego
naprężenie maleje e-krotnie, tj. o
ok. 33% wartości początkowej.
21
W
ŁAŚCIWOŚCI
LEPKOSPRĘŻYSTE
POLIMERÓW
–
MODELE
MECHANICZNE
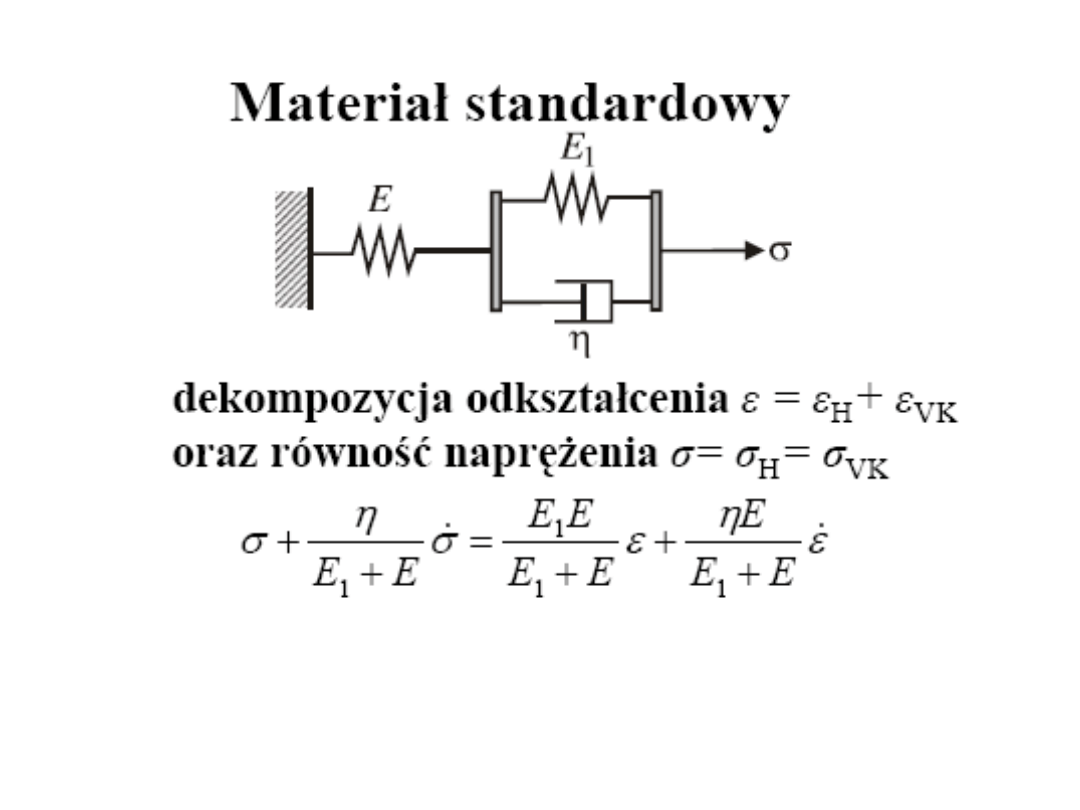
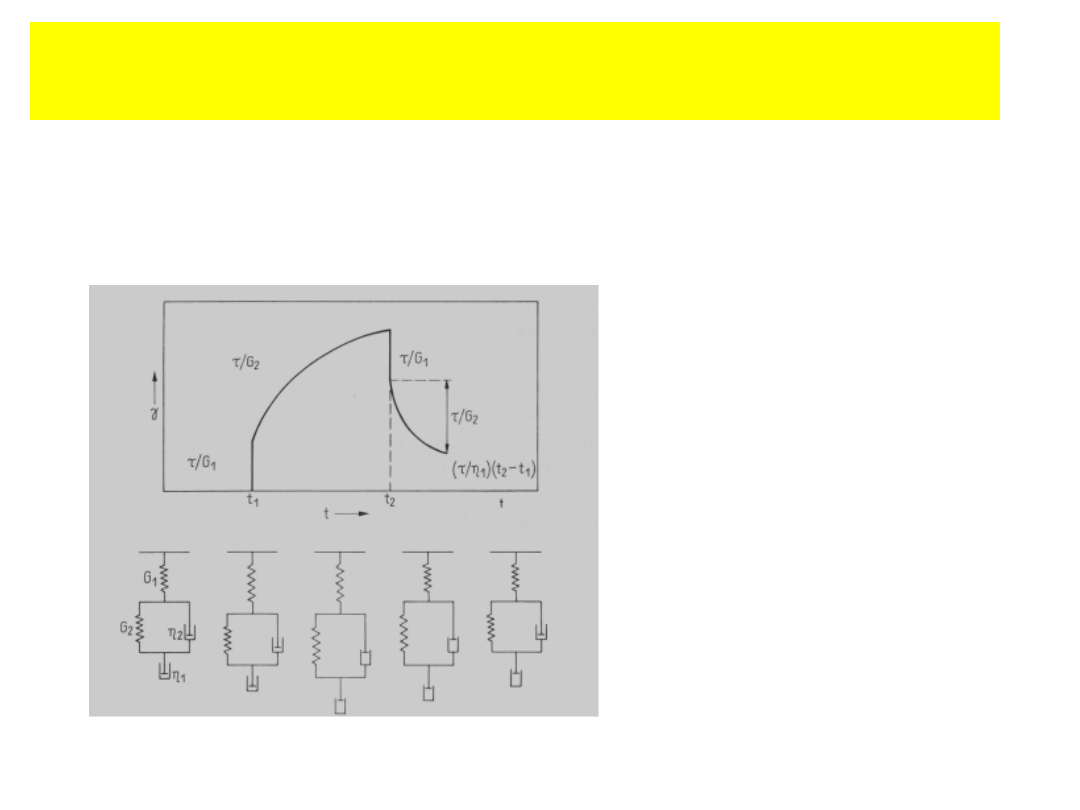
Model Burgersa lub ogólny model mechaniczny opisujący pełzanie polimerów
amorficznych składa się z kombinacji ciała Voigta-Kelvina i Maxwella.
Elementy w tym modelu różnią się wielkością modułów oraz lepkością
.
Pod wpływem naprężenia t
odkształcenie zmienia się w
czasie (t
1
-t
2
) i składa się z
odkształcenia atychmiastowego
(
t
/G
1
) i opóźnionego ((
t
/G
2
)
spowodowanego
działaniem
elementu lepkiego (tłumika),
którego szybkość płynięcia jest
równa t/h
3
.
Odkształcenie się ciała złożonego liniowo-lepkosprężystego
22
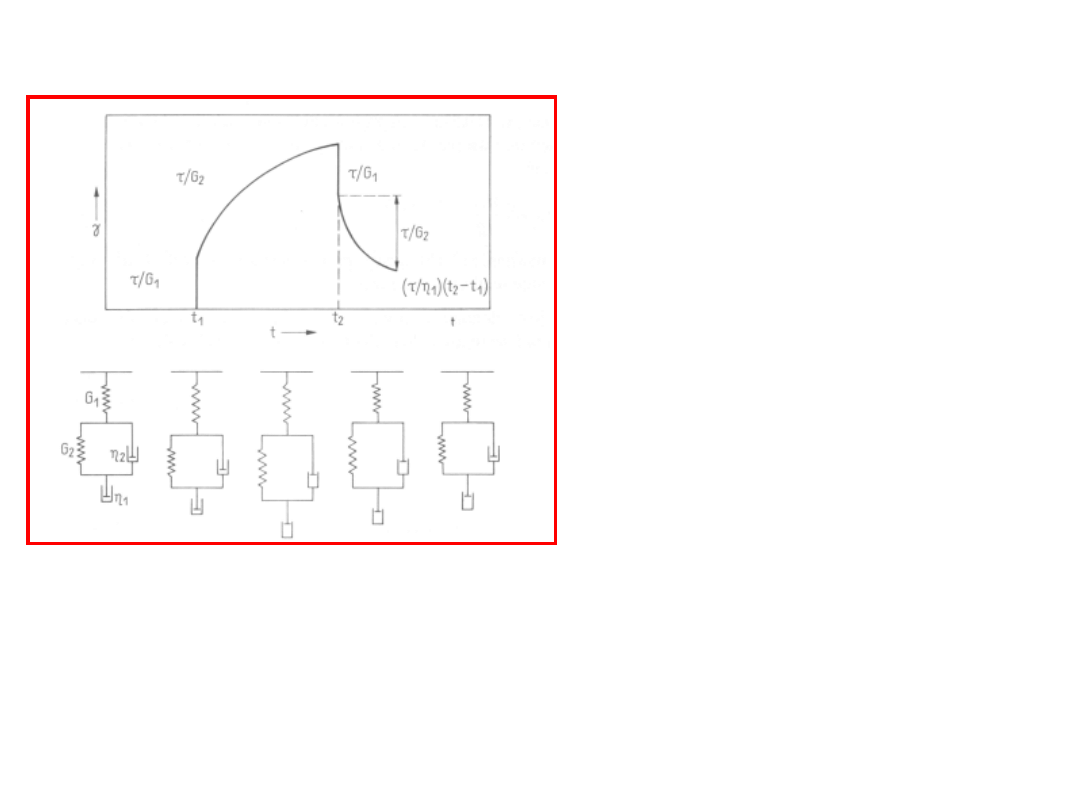
Po usunięciu obciążenia następuje
natychmiastowy powrót elementu
ciała idealnie sprężystego o wartość
t/G
1
oraz
powolny
powrót
poodkształceniowy elementu ciała
idealnie lepkiego t/G
2
, przy czym
pozostaje odkształcenie trwałe t/h
3
jako skutek płynięcia lepkiego.
Ten
model
opisuje
pełzanie
polimerów w sposób uproszczony,
ponieważ założenie, że wszystkie
elementy spełniają prawo Hooke'a i
Newtona jest przyjęte a priori.
Ponadto w tym modelu uwzględnia
się jeden czas relaksacji, a nie
spektrum czasów relaksacji.
23
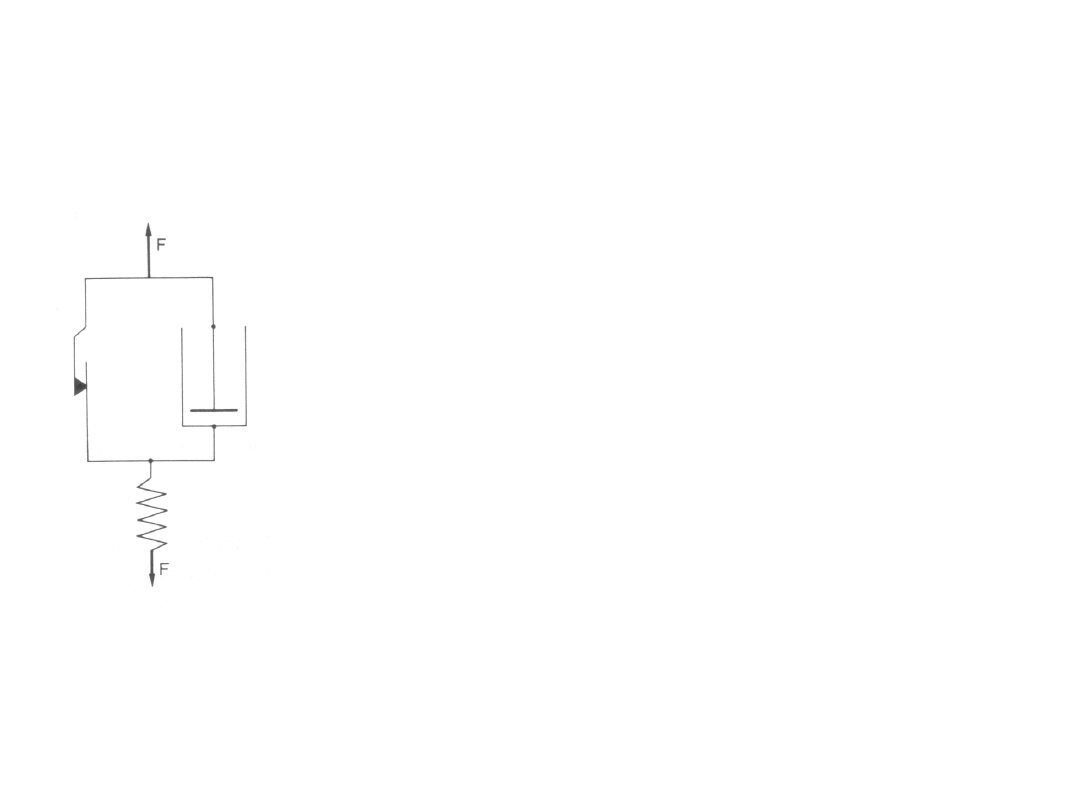
Model Binghama jest złożony z równolegle połączonych elementów ciała
Newtona i St.Venanta i szeregowo do nich ciała Hooke'a.
W zależności od wartości przyłożonego naprężenia
stycznego, ciało Binghama zachowuje się albo jak ciało
stałe, albo jak ciecz:
— przy naprężeniach małych, tj.
t
<
t
o
(
t
o
naprężenie
styczne, graniczne, równe
sile tarcia stycznego suwaka) odkształca się jedynie
sprężyna,
— po przekroczeniu naprężenia granicznego, tj. gdy t>
t
0
ciało zaczyna się odkształcać, płynąć.
24
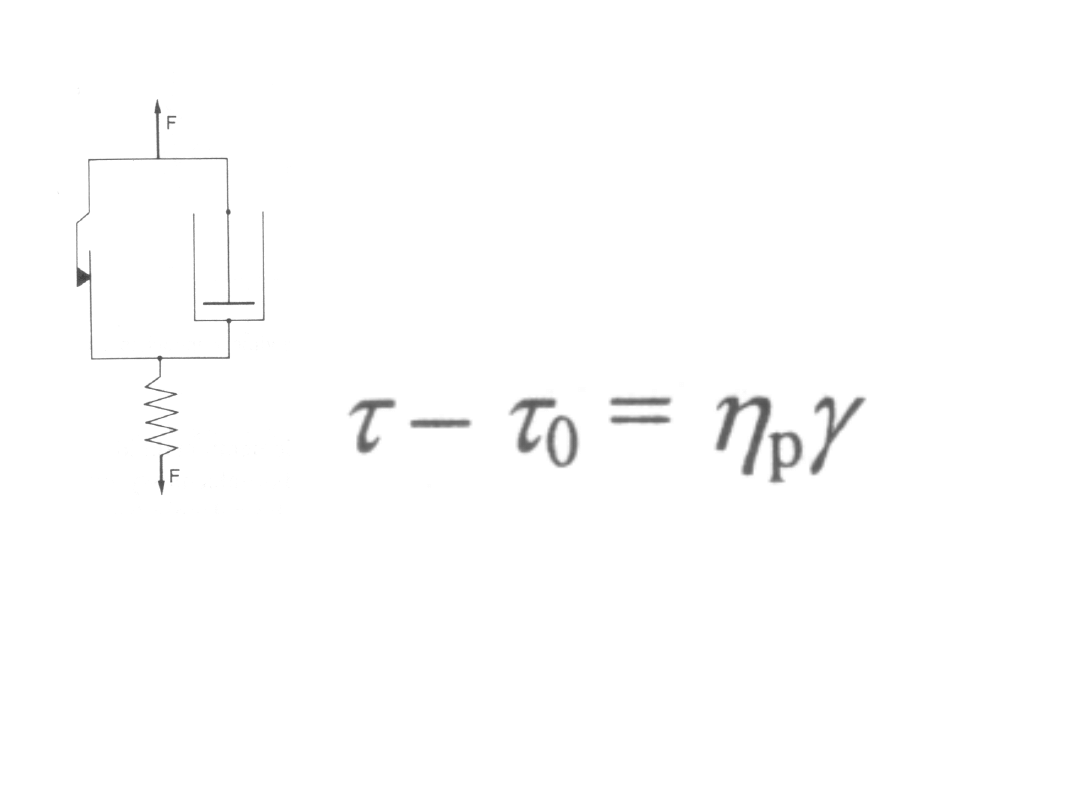
Reologiczne równanie stanu ciała Binghama dla
naprężeń stycznych większych od naprężenia
granicznego ma postać:
gdzie
h
p
— lepkość plastyczna
25

Do opisu pełzania polimerów lub relaksacji naprężeń
wykorzystuje się model uogólnionego ciała Voigta-Kelvina
lub Maxwella.
Uogólniony model zawiera nieograniczoną liczbę n prostych
modeli (Voigta-Kelvina lub Maxwella) o założonych wartościach
(modułu i lepkości) poszczególnych składowych modelu.
26
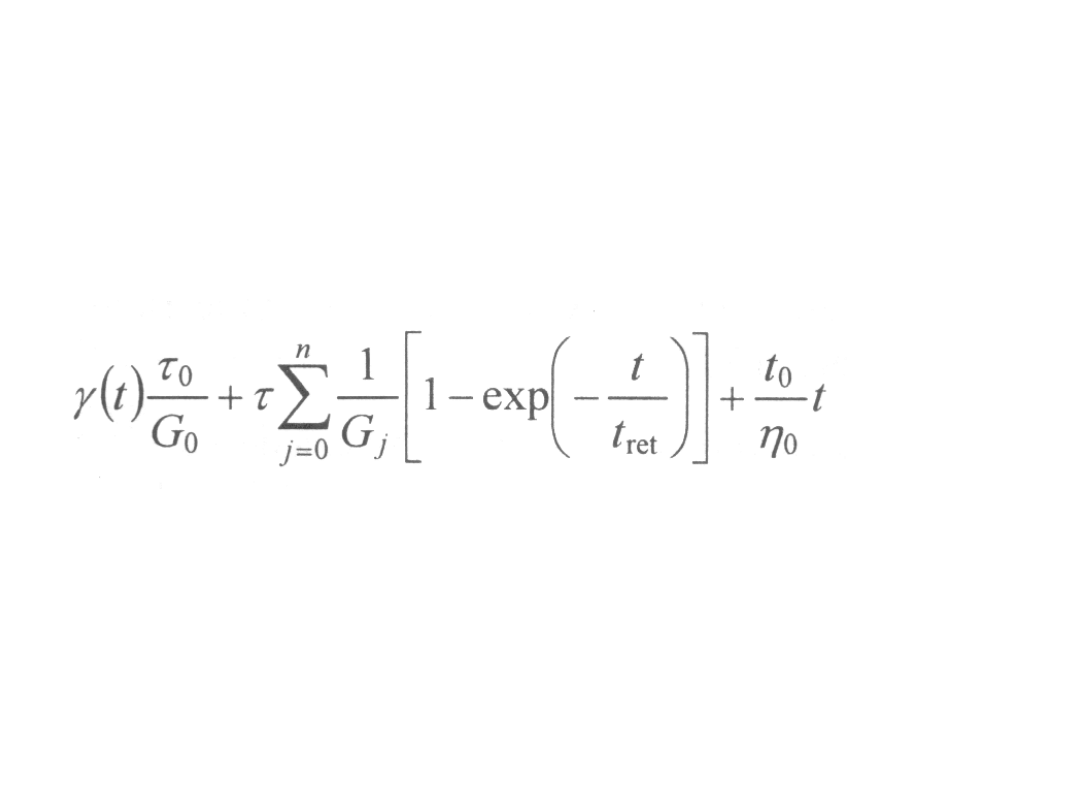
Sumaryczne odkształcenie modelu składającego się z nieograniczonej liczby n
połączonych szeregowo modeli Voigta-Kelvina oraz dołączonego szeregowo
modelu sprężyny o module G
o
i tłumika o lepkości h
o
przy założeniu, że
naprężenie t
o
= const opisuje równanie:
27
Widmo czasów relaksacji jest wynikiem złożonej morfologii
polimerów.
Długie sztywne segmenty lub łańcuchy wykonują powoli
ruchy cieplne, czas relaksacji jest długi
(t
rel
).
Giętkie łańcuchy wykonują szybkie ruchy oscylacyjne i
wówczas czas relaksacji jest krótki.
Cechy szczególne
28

Przegrupowania cząsteczek do stanu równowagi
zachodzą w czasie t
rel
= 1/f.
Ponieważ f 10
11
Hz jest częstotliwością ruchów
oscylacyjnych wokół położeń równowagi atomów i
cząsteczek, więc t
rel
jest wartością średnią
obejmującą dużą liczbę cząsteczek.
29
Ze wzrostem temperatury intensywność ruchów
cieplnych oraz przegrupowania elementów
struktury zachodzi szybciej, a zatem czas relaksacji
maleje
(T
t
rel
30

Cechy szczególne
Polimery amorficzne wykazują duże, a
polimery krystaliczne i usieciowane małe
relaksacje naprężeń i małe pełzanie.
W temperaturze pokojowej dla większości
metali i stopów pełzanie jest pomijalnie małe
— obserwuje się je dopiero w wysokich
temperaturach i pod dużym naprężeniem.
31
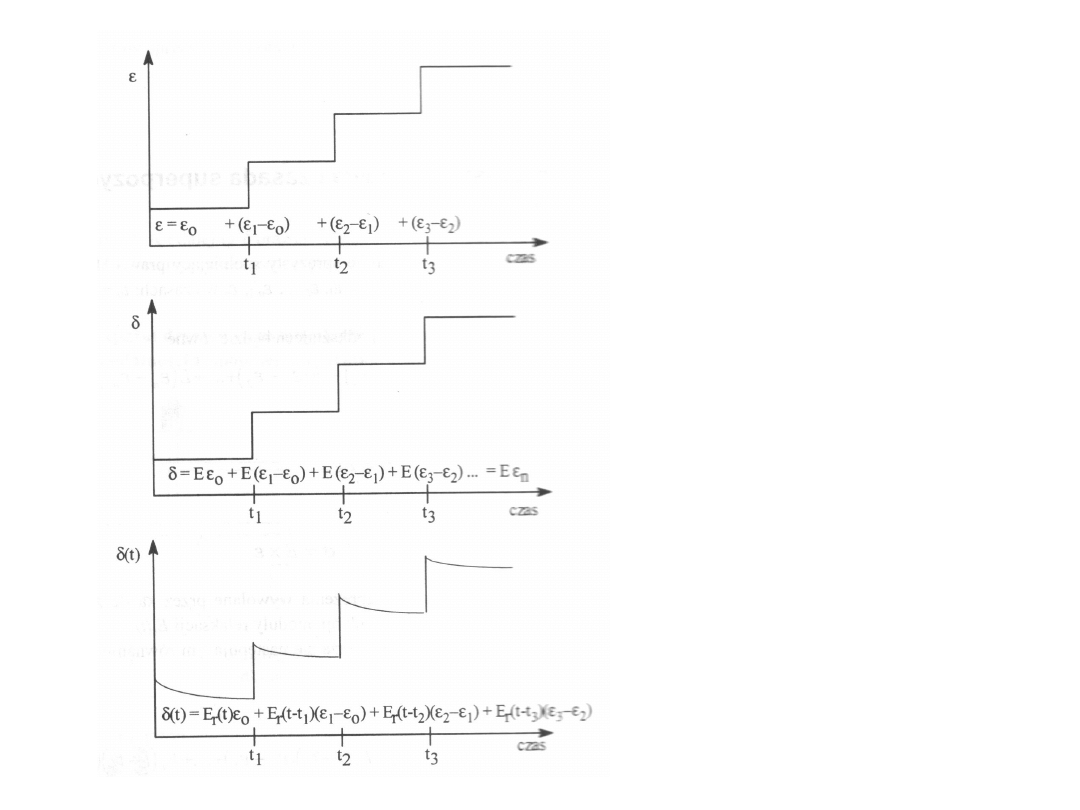
Zasada superpozycji Boltzmanna
Zasada superpozycji Boltzmanna powstała na podstawie
hipotezy, że wynik jakiegoś działania jest sumą wszystkich
jednostkowych działań.
Zachowanie
się
układów
liniowych
(sprężystych
lub
lepkosprężystych) w danej chwili jest związane z historią
obciążenia. Całkowite skutki działania naprężenia (lub
odkształcenia) w danej chwili są złożone z sumy przyrostów
(naprężeń lub odkształceń), które miały miejsce uprzednio.
W przypadku układów lepkosprężystych trzeba uwzględnić
zmienność modułów w czasie (G(t), E(t)\ czyli moduł relaksacji
oraz relaksacyjne zmniejszenie się kolejnych modułów.
32
33

Liniowe własności lepkosprężyste wykazują tylko te
materiały, które nie wykazują zmian struktury podczas
doświadczenia, np. nie ulegają krystalizacji.
Aby więc badać lepkosprężystość liniową, trzeba
prowadzić doświadczenia, stosując:
•bardzo małe obciążenia,
•temperatury, w których nie zachodzi krystalizacja.
34
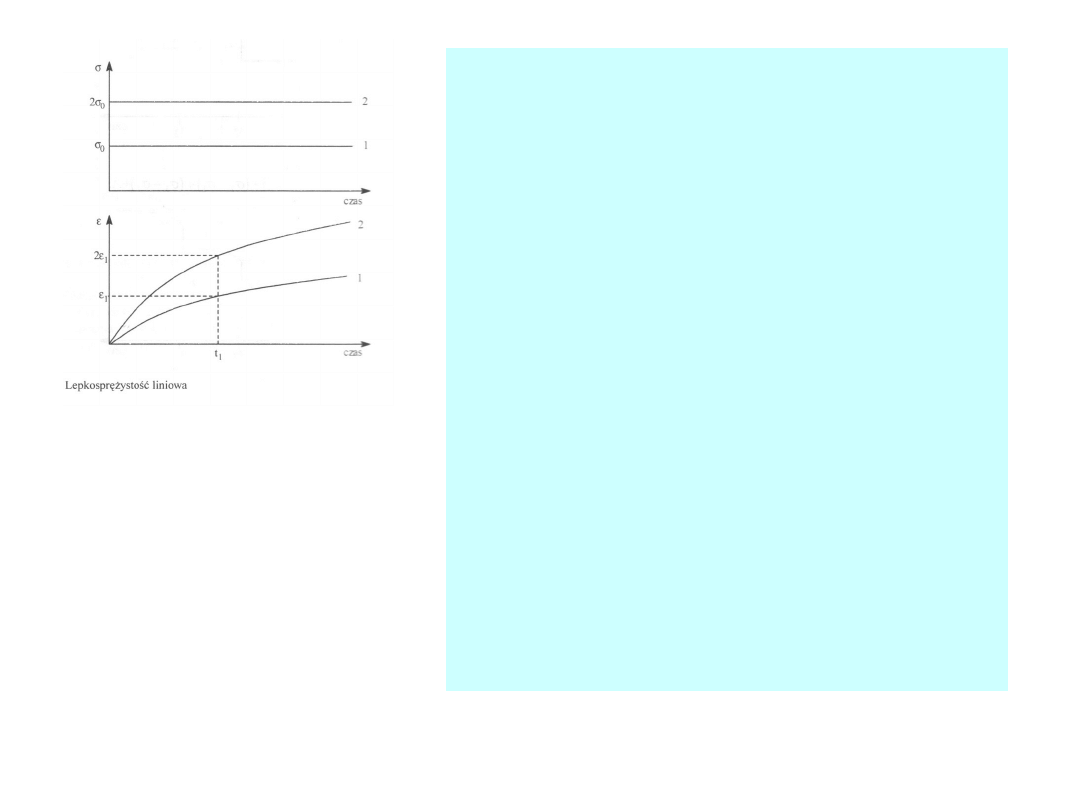
Lepkosprężystość liniowa polega na
tym, że materiał wykazuje prostą
proporcjonalność
naprężenia
od
odkształcenia, a stosunek naprężenia
do odkształcenia zależy od czasu.
Jeżeli w czasie t = 0 przyłożymy w
doświadczeniu
na
pełzanie
naprężenie σ
0
i po czasie t
1
odkształcenie będzie wynosić ε
1
, a
następnie prowadzimy badania przy
naprężeniu początkowym 2 x σ
2
i po
czasie t
1
uzyskamy odkształcenie
2xε
1
to mamy wówczas zachowanie
liniowo-lepkosprężyste.
35

Liniową lepkosprężystość materiału można również
przedstawić za pomocą modeli mechanicznych
składających się ze sprężyn Hooke'a i tłumików
newtonowskich.
Sprężyna reprezentuje zachowanie sprężyste, dla
którego
naprężenie
jest
proporcjonalne
do
odkształcenia. Tłumik reprezentuje zachowanie lepkie,
dla którego naprężenie jest proporcjonalne do szybkości
odkształcania.
36

Zasada równoważności temperaturowo-czasowej
Jeżeli polimer poddamy (powyżej jego Tg) działaniu naprężenia lub
będzie odkształcany, łańcuchy jego dążą do przyjęcia nowych
konformacji.
Szybkość zmian konformacji zależy od oporów napotykanych przez
łańcuchy. Opór ten reprezentowany jest przez współczynnik tarcia
lepkiego, który równa się sile potrzebnej na przesuwanie łańcucha w
jego otoczeniu z jednostkową prędkością.
Tak więc im szybsze wymagane jest przesunięcie łańcucha, tym większą
siłę trzeba zastosować. Podobnie większej siły na przesunięcie łańcucha
wymaga układ, gdy obniżymy temperaturę. Wynika stąd, że powinien
istnieć pewien związek pomiędzy czasową i temperaturową zależnością
własności lepkosprężystych.
37
Zasada równoważności temperaturowo-czasowej
Właściwości układów lepkosprężystych zależą od ruchliwości segmentów
łańcucha, którą obrazuje czas relaksacji lub lepkość zmieniająca się wraz z
temperaturą w sposób wykładniczy.
Na podstawie zachowania się polimeru relaksacyjnego w danej temperaturze
można przewidzieć zachowanie się polimeru w innej temperaturze jedynie
przez zmianę czasu.
Zasadę tę opisuje równanie:
gdzie:
a
T
- współczynnik przesunięcia (redukcji), - czas relaksacji w temperaturze
T i T
0
,
h
- lepkość w temperaturze T i T
0
.
38
Współczynnik przesunięcia a
T
zależy wykładniczo od temperatury i
jest opisany równaniem WLF (Williamsa, Landela, Ferry’ego)
gdzie: T
0
- temperatura odniesienia,
T
0
= T
g
+ 50 K,
C
1
, C
2
- stałe (C
1
= 8,86; C
2
= 101,6).
Dla T
0
= T
g
wartość stałych C
1
= 17, C
2
= 52.
39
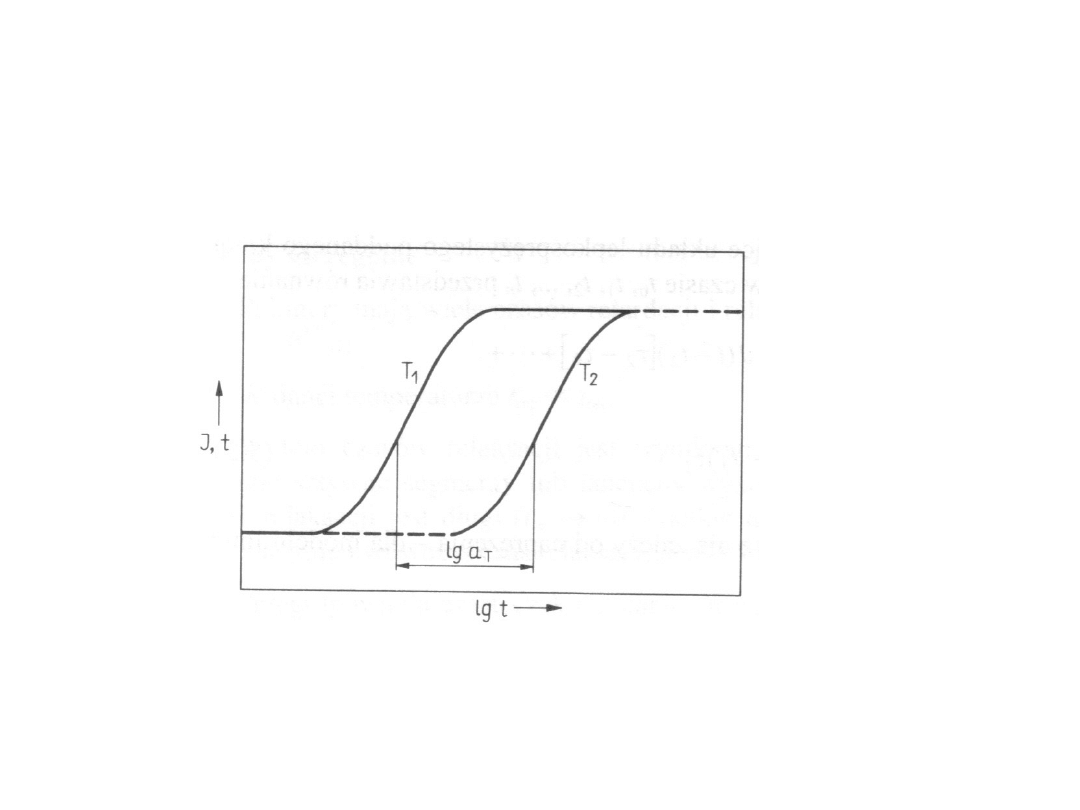
Zgodnie z zasadą równoważności temperaturowo-czasowej krzywe,
np. rozkładu czasów relaksacji lub modułów dla poszczególnych
temperatur, można przesunąć równolegle wzdłuż osi czasu (t) do
zetknięcia z krzywą obowiązującą dla dowolnej temperatury
odniesienia.
Równoważność temperaturowo
Równoważność temperaturowo--czasowa, podatności na pełzanie
czasowa, podatności na pełzanie J(t)
J(t)
40
Wyszukiwarka
Podobne podstrony:
wyk13 Rown Maxwella
Rownanie Maxwella
Ustalony ruch przez dyfuzje gazow wg Maxwella
instrukcja METODA MAXWELLA MOHRA info
wahadło Maxwella
Rzepkoteka Równania Maxwella i?la płaska 15 2016 streszczenie
mechana, maxwel z bledem, Wydział - Mech
7 Twierdzenie Betti - Maxwella i jego wykorzystanie b, ˙wiczenia wykonywali˙my dla belki teowej o na
Metoda Maxwella
SPRAB12, rozk˙ad Maxwella
MAXWELL2, Sekcja 3
Maxwell, 1
Maxwell, 1
więcej podobnych podstron