Lecture 14: CUSUM and EWMA
Spanos
EE290H F05
1
CUSUM, MA and EWMA Control Charts
Increasing the sensitivity and getting ready for
automated control:
The Cumulative Sum chart, the Moving
Average and the Exponentially Weighted
Moving Average Charts.
Lecture 14: CUSUM and EWMA
Spanos
EE290H F05
2
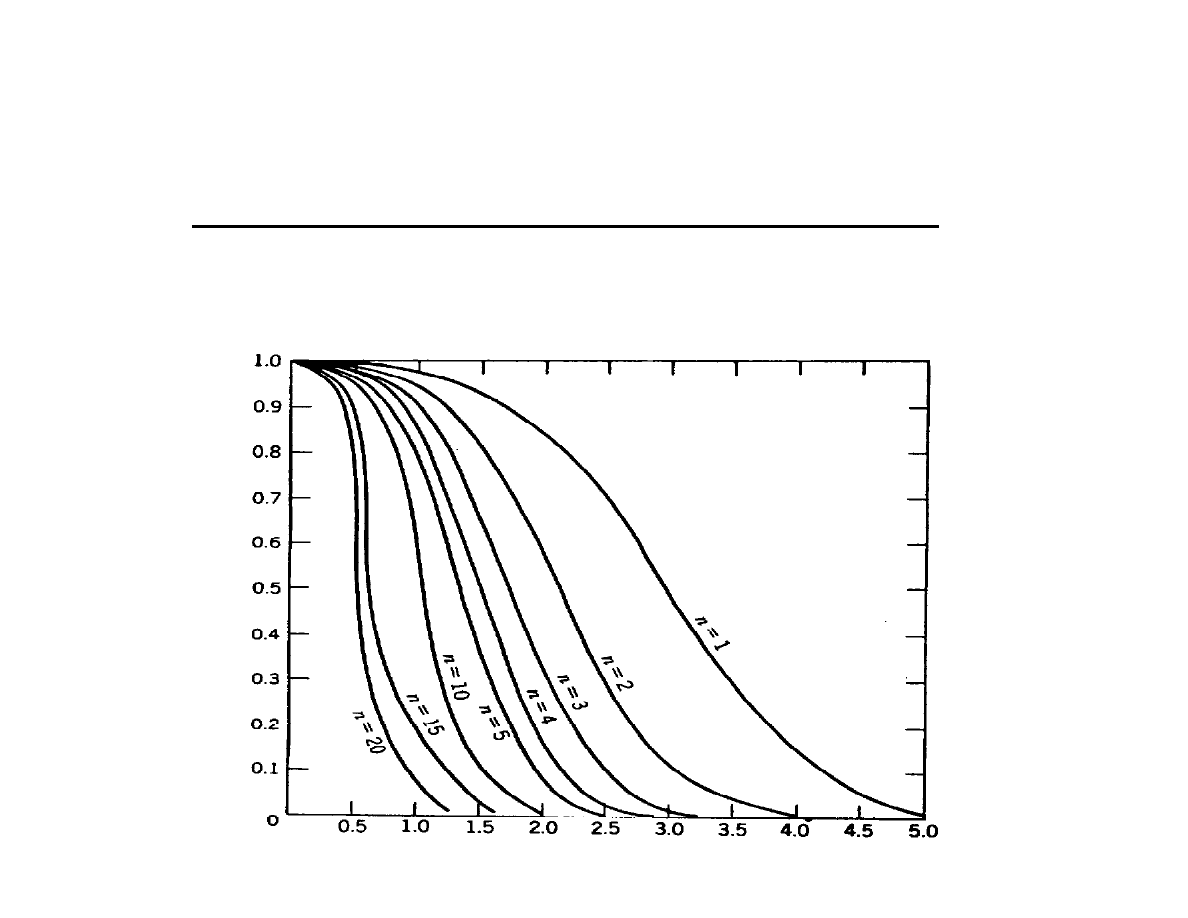
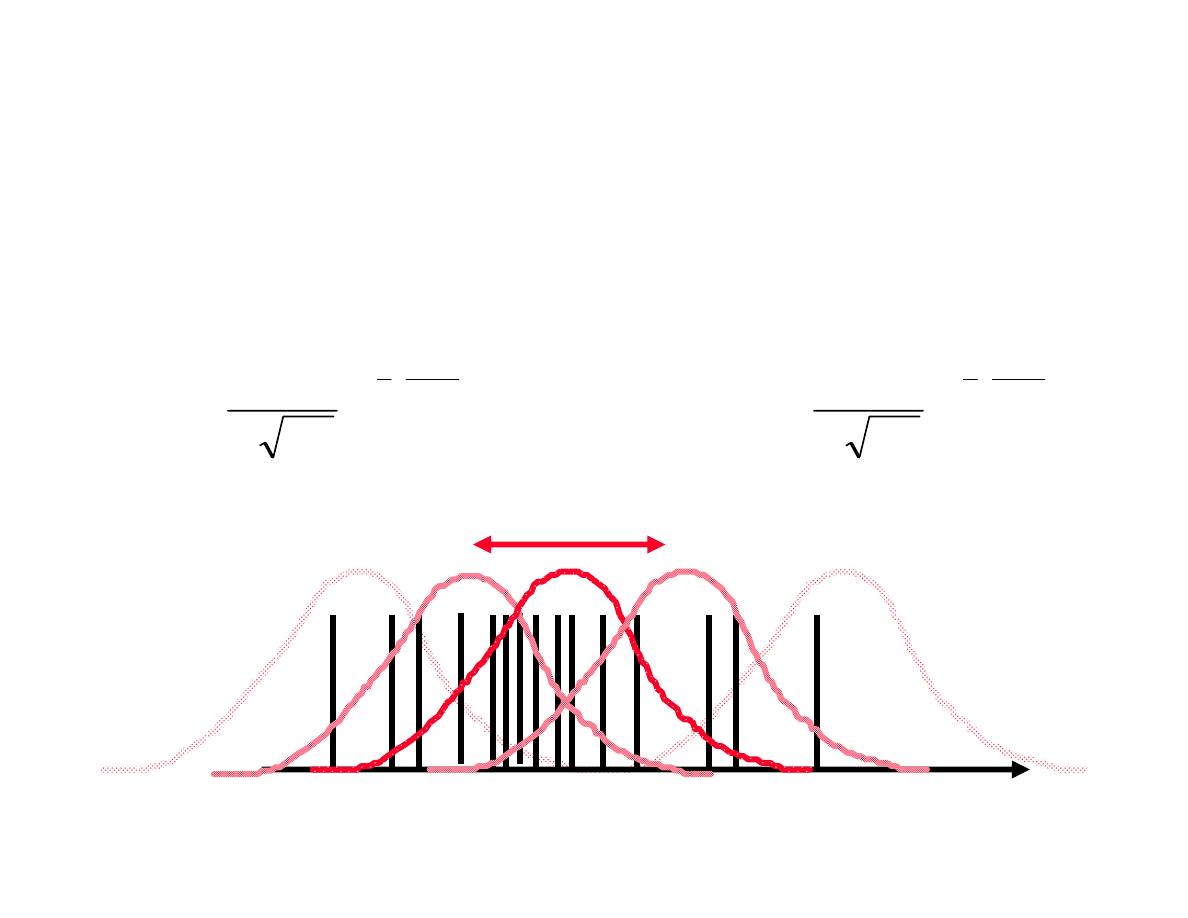
Shewhart Charts cannot detect small shifts
Fig 6-13 pp 195 Montgomery.
The charts discussed so far are variations of the Shewhart
chart: each new point depends only on one subgroup.
Shewhart charts are sensitive to large process shifts.
The probability of detecting small shifts fast is rather small:
Lecture 14: CUSUM and EWMA
Spanos
EE290H F05
3
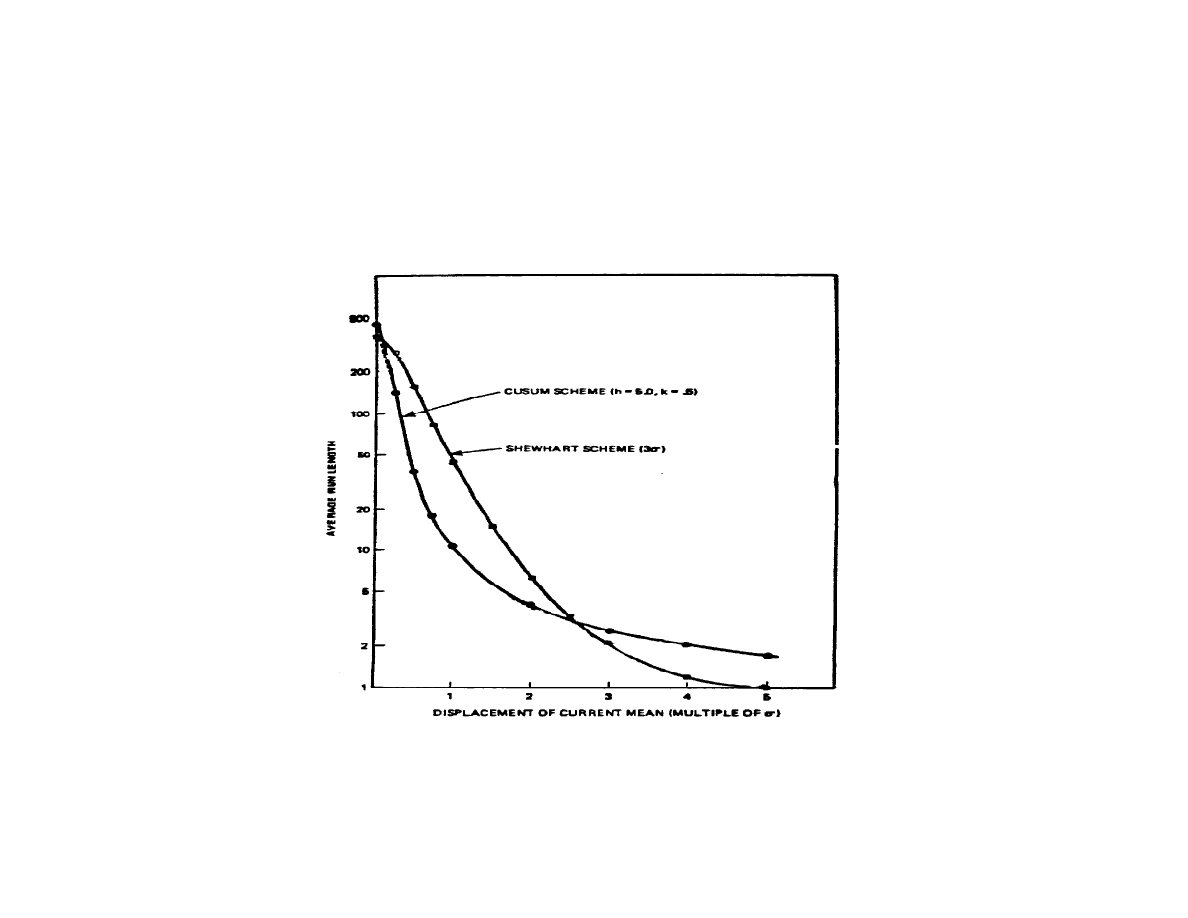
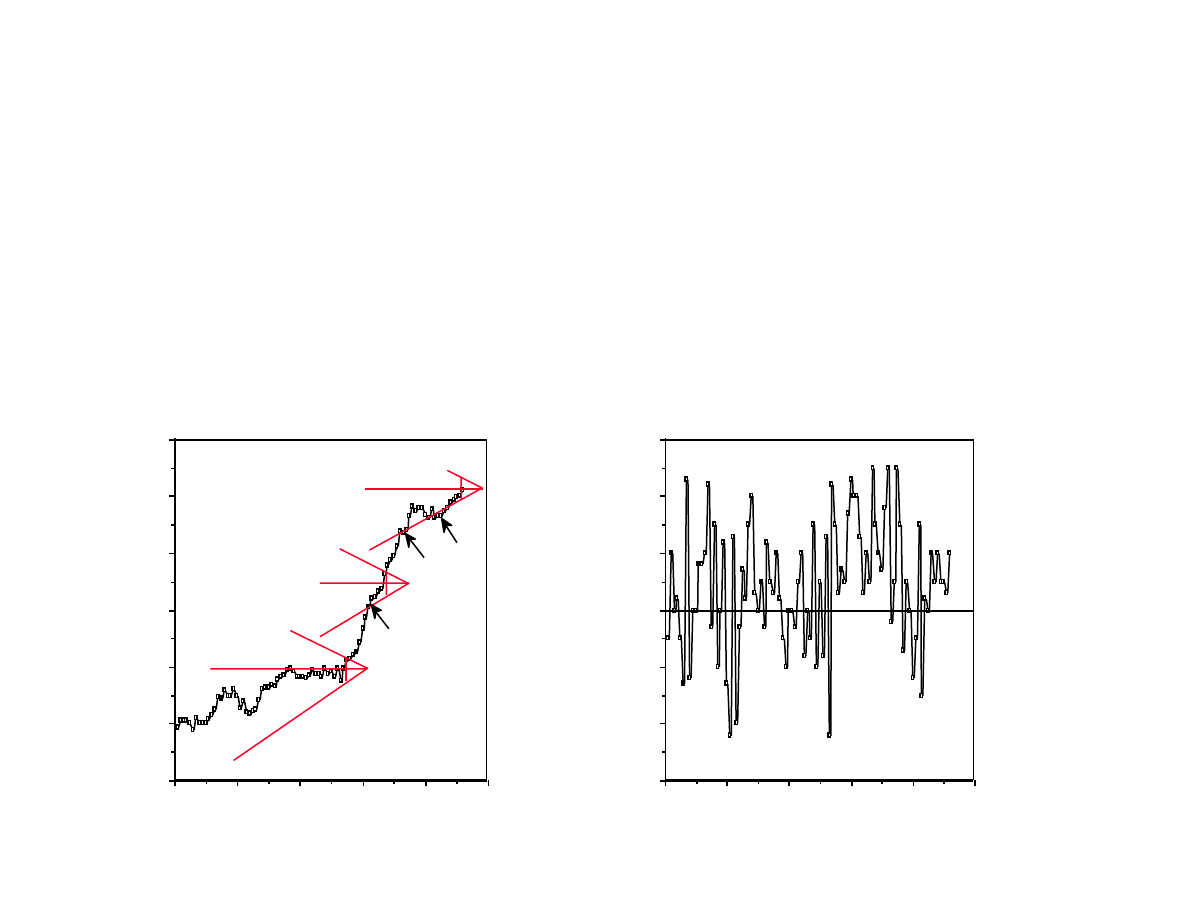
Cumulative-Sum Chart
If each point on the chart is the cumulative history (integral)
of the process, systematic shifts are easily detected. Large,
abrupt shifts are not detected as fast as in a Shewhart chart.
CUSUM charts are built on the principle of Maximum
Likelihood Estimation (MLE).
Lecture 14: CUSUM and EWMA
Spanos
EE290H F05
4
The "correct" choice of probability density function (pdf)
moments maximizes the collective likelihood of the
observations.
If x is distributed with a pdf(x,
θ) with unknown θ, then θ can
be estimated by solving the problem:
This concept is good for estimation as well as for comparison.
Maximum Likelihood Estimation
max
θ
m
Π
i=1
pdf( x
i
,
θ)
Lecture 14: CUSUM and EWMA
Spanos
EE290H F05
5
Maximum Likelihood Estimation Example
To estimate the mean value of a normal distribution, collect
the observations x
1
,x
2
, ... ,x
m
and solve the non-linear
programming problem:
⎪
⎪
⎭
⎪⎪
⎬
⎫
⎪
⎪
⎩
⎪⎪
⎨
⎧
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
Σ
⎪
⎭
⎪
⎬
⎫
⎪
⎩
⎪
⎨
⎧
Π
⎟
⎠
⎞
⎜
⎝
⎛ −
−
=
⎟
⎠
⎞
⎜
⎝
⎛ −
−
=
2
2
ˆ
2
1
1
ˆ
ˆ
2
1
1
ˆ
2
1
log
min
2
1
max
σ
μ
μ
σ
μ
μ
π
σ
π
σ
i
i
x
m
i
x
m
i
e
or
e
Lecture 14: CUSUM and EWMA
Spanos
EE290H F05
6
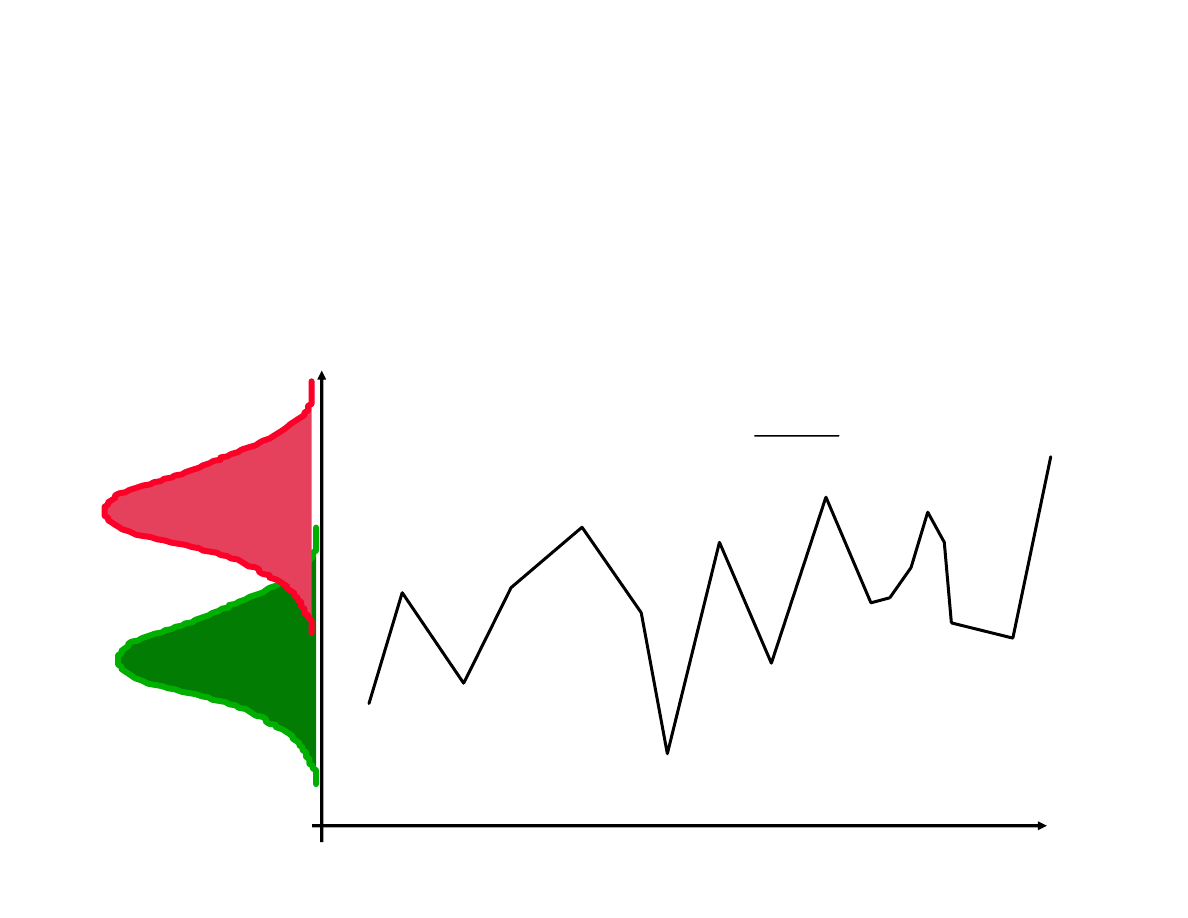
MLE Control Schemes
If a process can have a "
good
" or a "
bad
" state (with the control
variable distributed with a pdf f
G
or f
B
respectively).
This statistic will be small when the process is "
good
" and large when
"
bad
":
m
Σ
i=1
log
f
B
(x
i
)
f
G
(x
i
)
∑
=
=
=
Π
m
i
i
i
m
i
p
p
1
1
)
log(
)
log(
Lecture 14: CUSUM and EWMA
Spanos
EE290H F05
7
MLE Control Schemes (cont.)
S
m =
m
Σ
i=1
log
f
B
(x
i
)
f
G
(x
i
)
- min
k < m
k
Σ
i=1
log
f
B
(x
i
)
f
G
(x
i
)
> L
or
S
m
= max (S
m-1
+log
f
B
(x
m
)
f
G
(x
m
)
, 0) > L
Note that this counts from the beginning of the process. We
choose the best k points as "calibration" and we get:
This way, the statistic S
m
keeps a cumulative score of all the
"bad" points.
Notice that we need to know what the "bad"
process is!
Lecture 14: CUSUM and EWMA
Spanos
EE290H F05
8
The Cumulative Sum chart
S
m
=
m
Σ
i=1
(x
i
- µ
0
)
Advantages
The CUSUM chart is very effective for small shifts and
when the subgroup size n=1.
Disadvantages
The CUSUM is relatively slow to respond to large shifts.
Also, special patterns are hard to see and analyze.
If
θ is a mean value of a normal distribution
,
is simplified to:
where
μ
0
is the target mean of the process. This can be
monitored with V-shaped or tabular “limits”.
Lecture 14: CUSUM and EWMA
Spanos
EE290H F05
9
Example
-15
-10
-5
0
5
10
15
20
40
60
80
100
120
140
160
µ0=-0.1
LCL=-13.6
UCL=13.4
-60
-40
-20
0
20
40
60
80
100
120
0
20
40
60
80
100
120
140
160
0
Shewhart
small shift
CUSUM small shift
Lecture 14: CUSUM and EWMA
Spanos
EE290H F05
10
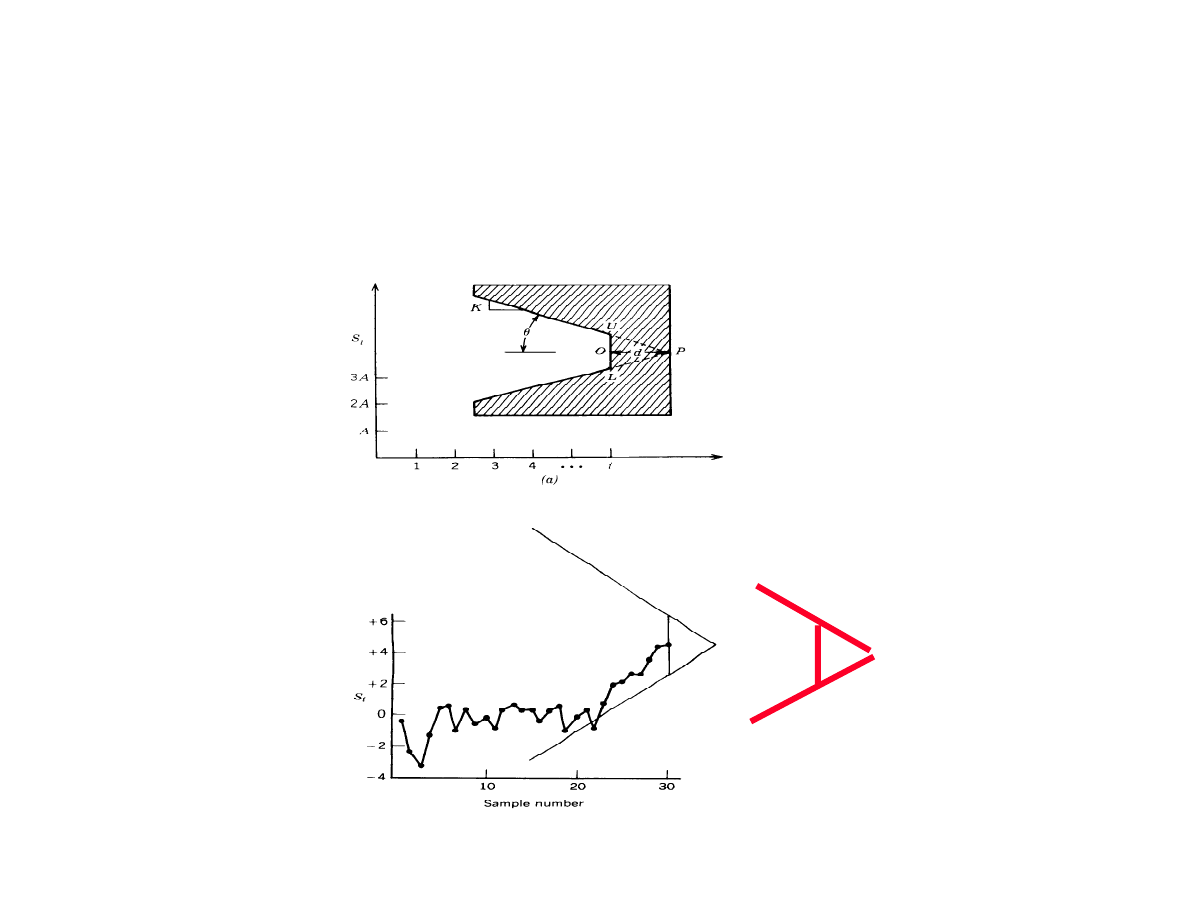
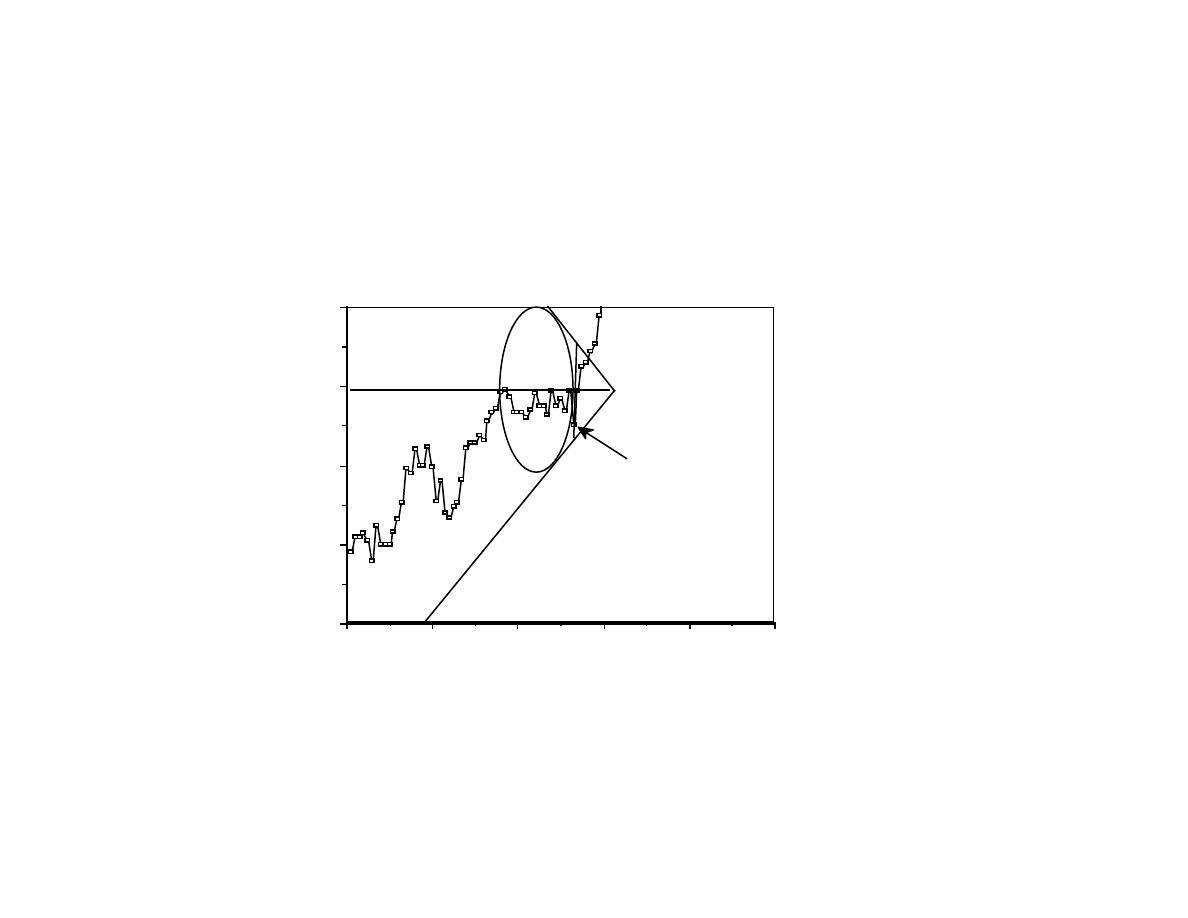
The V-Mask CUSUM design
for standardized observations y
i
=(x
i
-
μ
o
)/
σ
Figure 7-3 Montgomery pp 227
Need to set
L(0)
(i.e. the run length when the process is in
control), and
L(
δ)
(i.e. the run-length for a specific deviation).
Lecture 14: CUSUM and EWMA
Spanos
EE290H F05
11
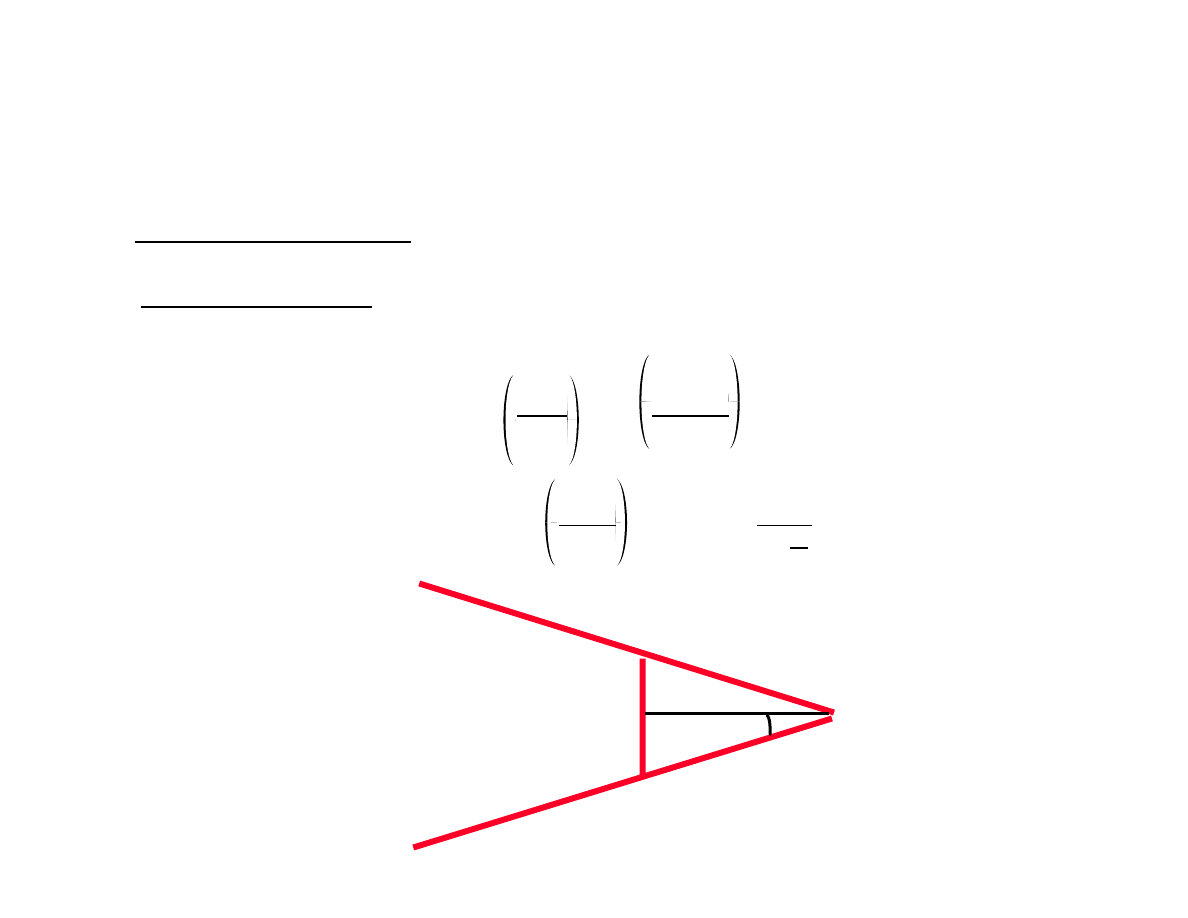
The V-Mask CUSUM design
for standardized observations y
i
=(x
i
-
μ
o
)/
σ
d = 2
δ
2
ln
1-
β
α
θ = tan
-1
δ
2A
δ = Δ
σ
x
d
θ
δ is the amount of shift (normalized to σ) that we wish to detect with type I
error
α and type II error β.
Α is a scaling factor: it is the horizontal distance between successive
points in terms of unit distance on the vertical axis.
Lecture 14: CUSUM and EWMA
Spanos
EE290H F05
12
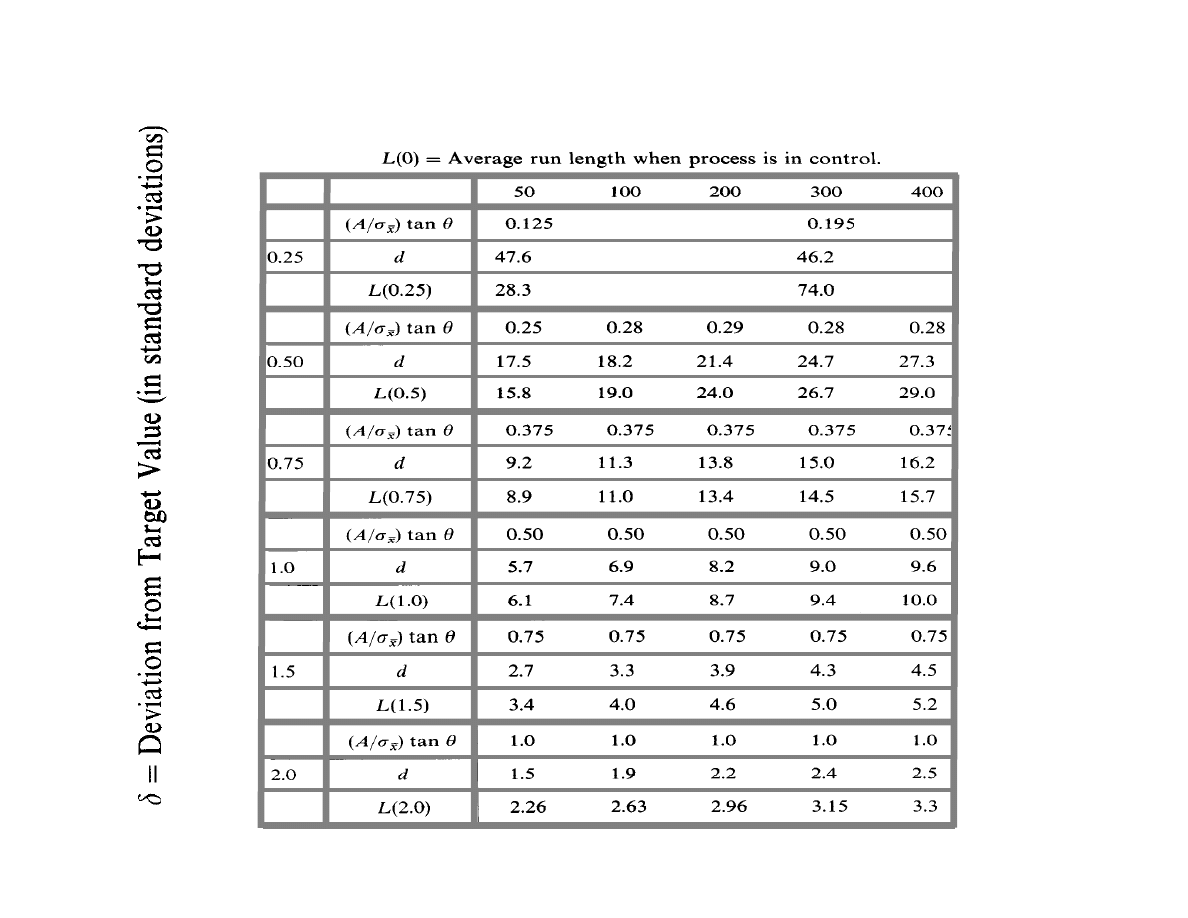
ARL vs. Deviation for V-Mask CUSUM
Lecture 14: CUSUM and EWMA
Spanos
EE290H F05
13
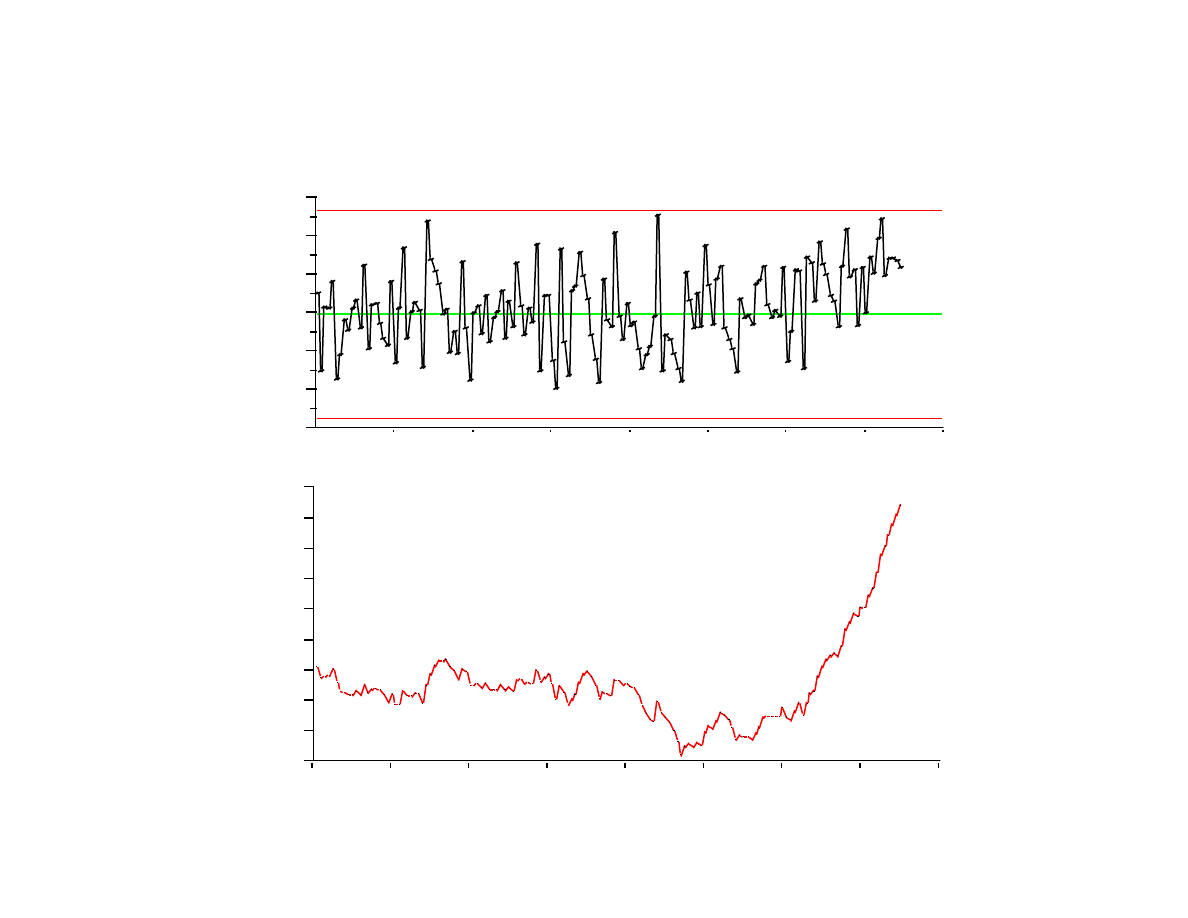
CUSUM chart of furnace Temperature difference
I
II
III
Detect 2C
o
,
σ =1.5C
o
, (i.e.
δ=1.33), α=.0027 β=0.05,
A=1
=>
θ = 18.43
o
, d = 6.6
100
80
60
40
20
0
-10
0
10
20
30
40
50
100
80
60
40
20
0
-3
-2
-1
0
1
2
3
Lecture 14: CUSUM and EWMA
Spanos
EE290H F05
14
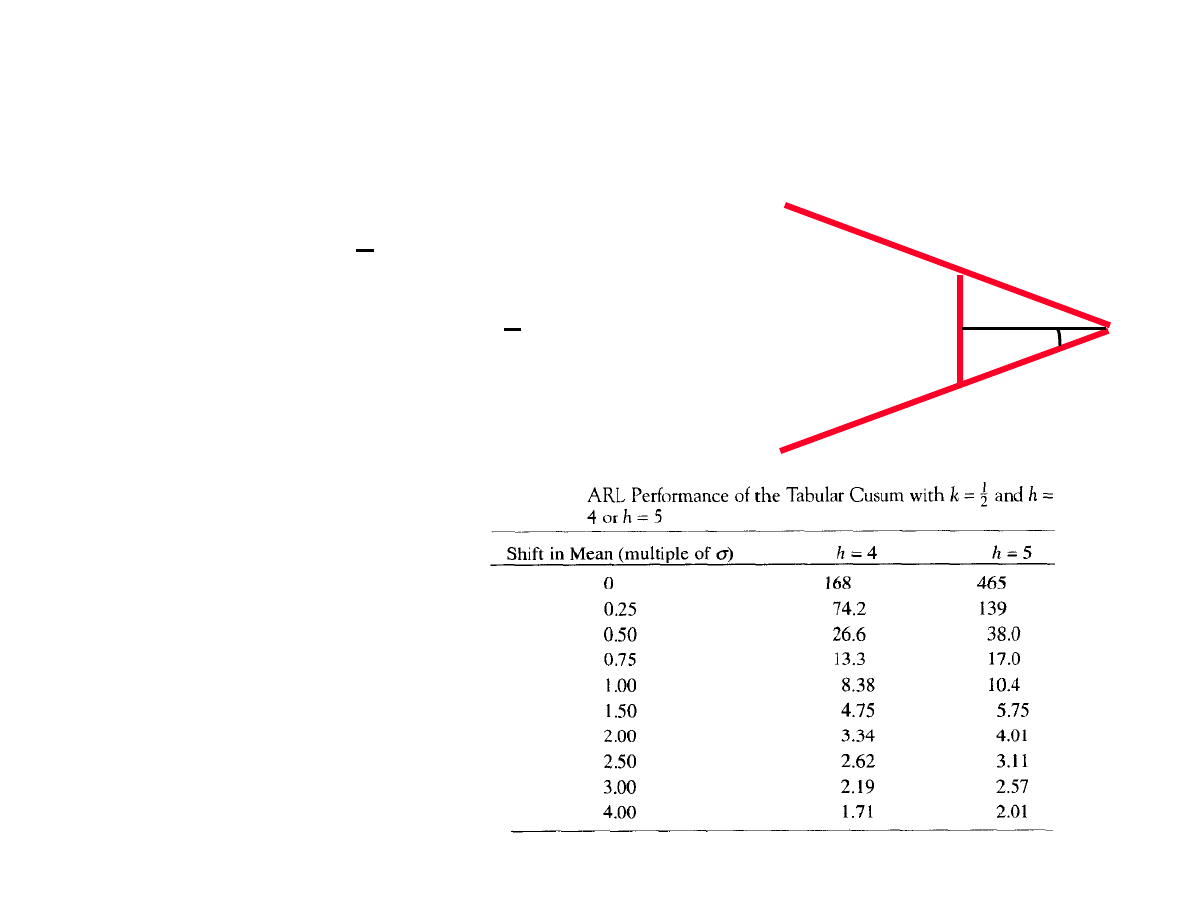
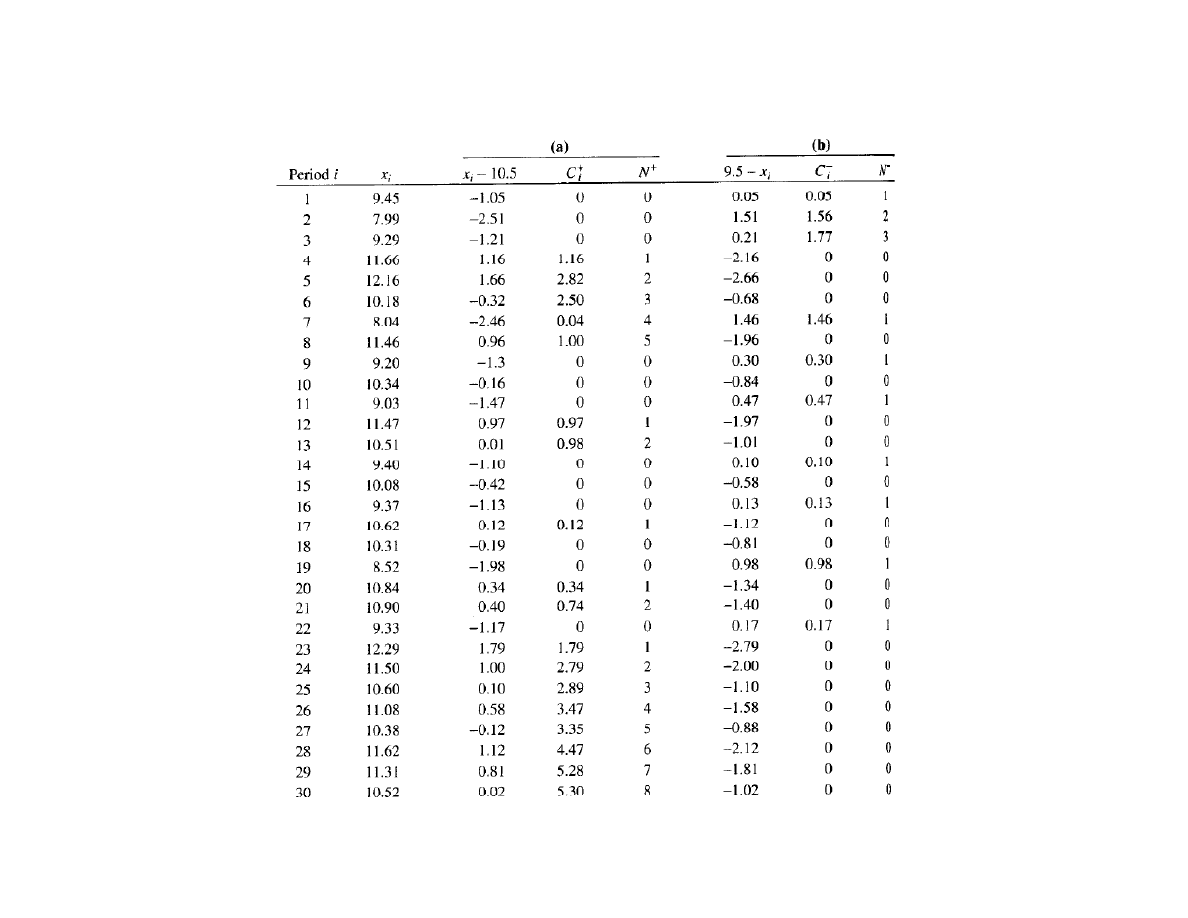
Tabular CUSUM
A tabular form is easier to implement in a CAM system
C
i
+
= max [ 0, x
i
- (
μ
o
+ k ) + C
i-1
+
]
C
i
-
= max [ 0, (
μ
o
- k ) - x
i
+ C
i-1
-
]
C
0
+
= C
0
-
= 0
k = (
δ/2)/σ
h = d
σ
x
tan(
θ)
d
θ
h
Lecture 14: CUSUM and EWMA
Spanos
EE290H F05
15
Tabular CUSUM Example
Lecture 14: CUSUM and EWMA
Spanos
EE290H F05
16
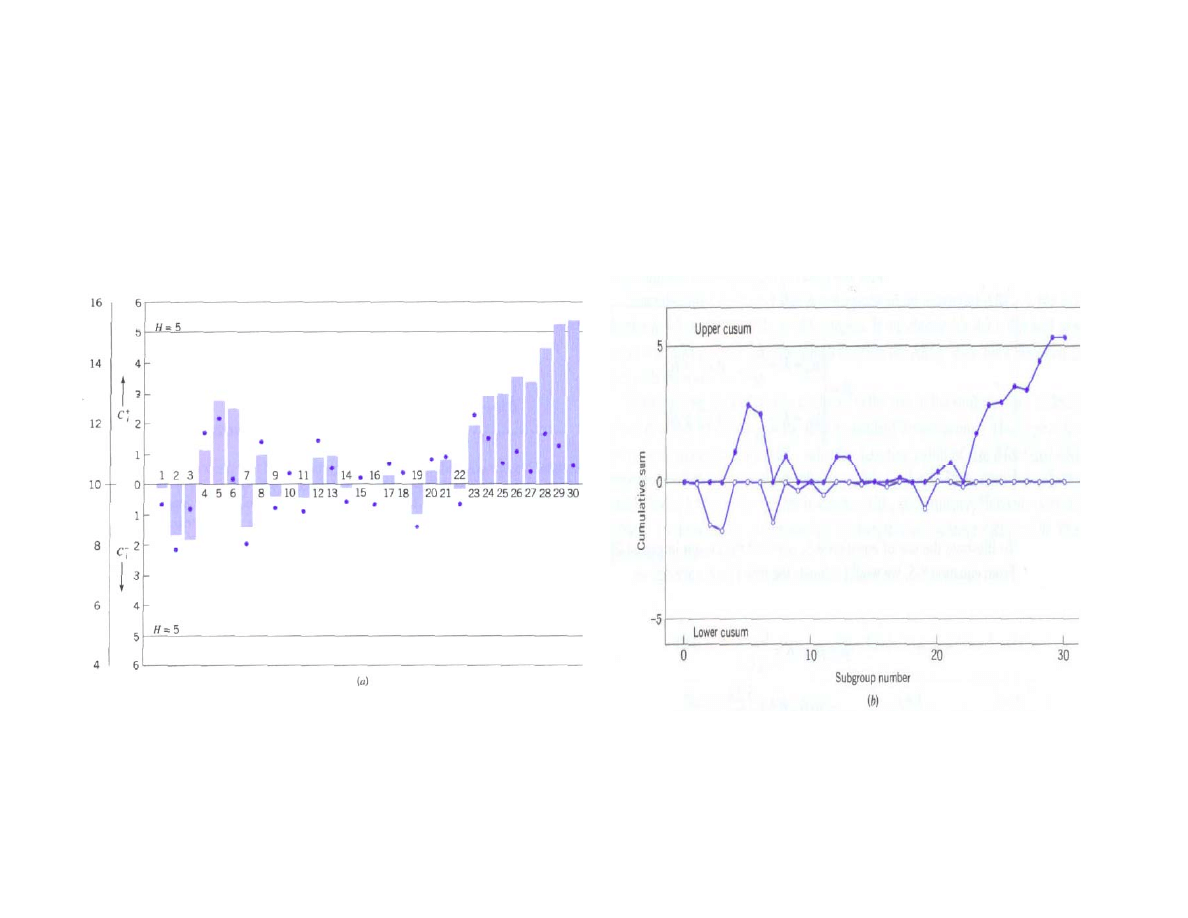
Various Tabular CUSUM Representations
Lecture 14: CUSUM and EWMA
Spanos
EE290H F05
17
CUSUM Enhancements
Other solutions include the application of Fast Initial
Response (FIR) CUSUM, or the use of combined CUSUM-
Shewhart charts.
To speed up CUSUM response one can use "modified" V
masks:
100
80
60
40
20
0
-5
0
5
10
15

Lecture 14: CUSUM and EWMA
Spanos
EE290H F05
18
General MLE Control Schemes
Since the MLE principle is so general, control
schemes can be built to detect:
• single or multivariate deviation in means
• deviation in variances
• deviation in covariances
An important point to remember is that MLE
schemes need, implicitly or explicitly, a definition of
the "
bad
" process.
The calculation of the ARL is complex but possible.
Lecture 14: CUSUM and EWMA
Spanos
EE290H F05
19
Control Charts Based on Weighted Averages
The 3-sigma control limits for M
t
are:
M
t
=
x
t
+ x
t-1
+ ... +x
t-w+1
w
V(M
t
) = σ
2
n w
UCL = x + 3 σ
n w
LCL = x - 3 σ
n w
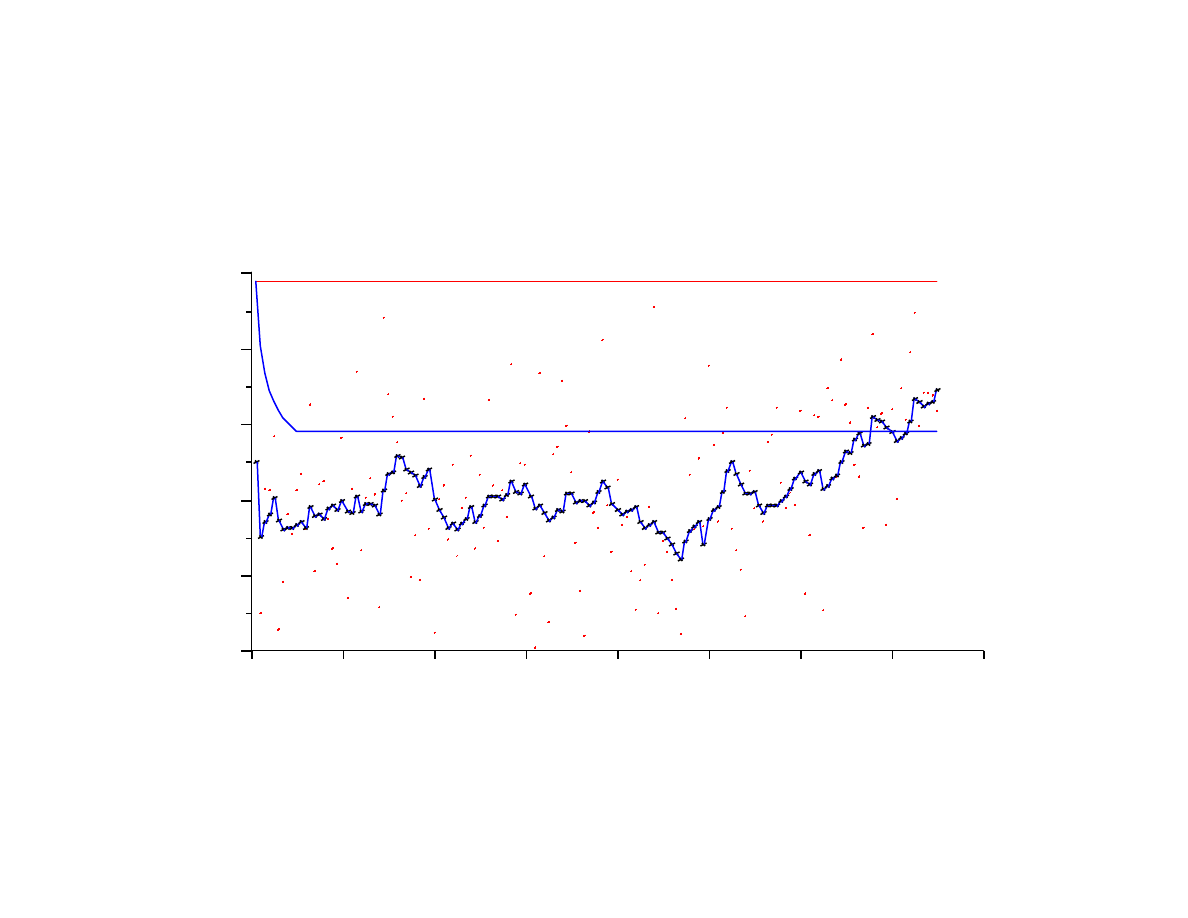
Small shifts can be detected more easily when multiple
samples are combined.
Consider the average over a "moving window" that contains
w subgroups of size n:
Limits are wider during start-up and stabilize after the first w
groups have been collected.
Lecture 14: CUSUM and EWMA
Spanos
EE290H F05
20
Example - Moving average chart
-10
-5
0
5
10
15
0
20
40
60
80
100
120
140
160
sample
w = 10
Lecture 14: CUSUM and EWMA
Spanos
EE290H F05
21
The Exponentially Weighted Moving Average
If the CUSUM chart is the sum of the entire process history,
maybe a weighed sum of the recent history would be more
meaningful:
z
t
=
λx
t
+ (1 -
λ)z
t -1
0 <
λ < 1 z
0
= x
It can be shown that the weights decrease geometrically
and that they sum up to unity.
z
t
=
λ
( 1 -
λ )
j
x
t - j
+ ( 1 -
λ )
t
z
0
Σ
j = 0
t - 1
UCL
=
x
+
3
σ
λ
( 2 -
λ ) n
LCL
=
x
-
3
σ
λ
( 2 -
λ ) n
Lecture 14: CUSUM and EWMA
Spanos
EE290H F05
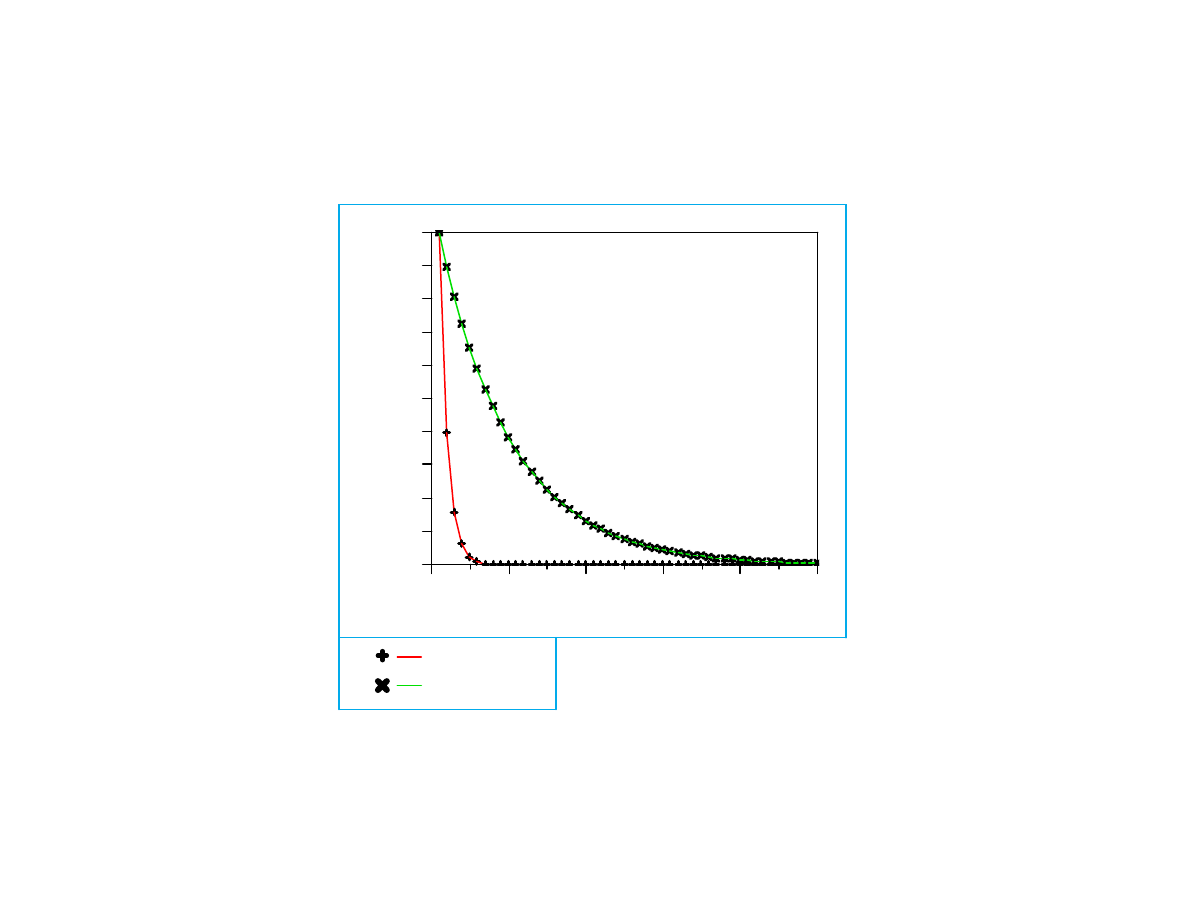
22
Two example Weighting Envelopes
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
0
10
20
30
40
50
EWMA 0.6
EWMA 0.1
-> age of sample
relative
importance
Lecture 14: CUSUM and EWMA
Spanos
EE290H F05
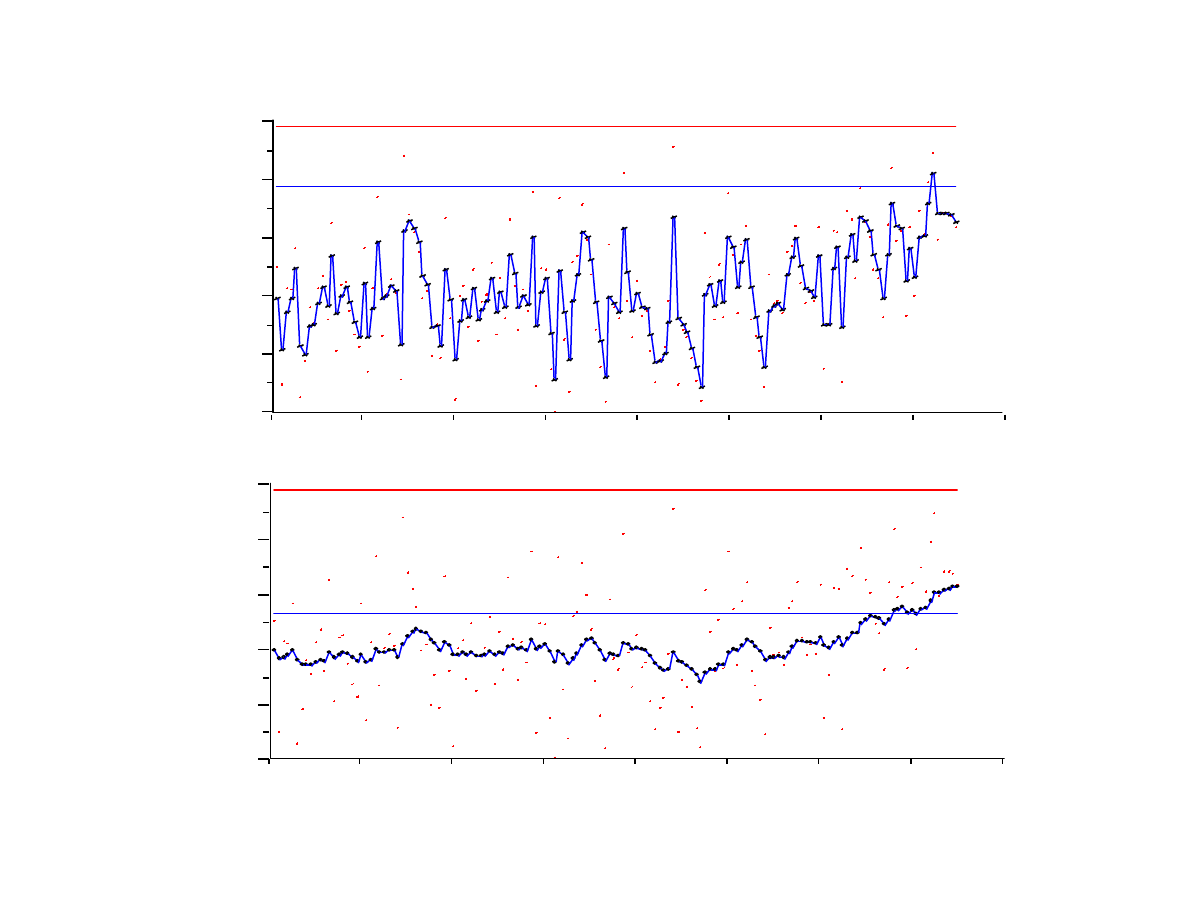
23
EWMA Comparisons
-10
-5
0
5
10
15
0
20
40
60
80
100
120
140
160
sample
-10
-5
0
5
10
15
0
20
40
60
80
100
120
140
160
λ=0.6
λ=0.1
Lecture 14: CUSUM and EWMA
Spanos
EE290H F05
24
Another View of the EWMA
• The EWMA value z
t
is a forecast of the sample at the t+1
period.
• Because of this, EWMA belongs to a general category of
filters that are known as “time series” filters.
• The proper formulation of these filters can be used for
forecasting and feedback / feed-forward control!
• Also, for quality control purposes, these filters can be used
to translate a non-IIND signal to an IIND residual...
x
t
= f ( x
t - 1
, x
t - 2
, x
t - 3
,... )
x
t
- x
t
= a
t
Usually:
x
t
=
φ
i
x
t - i
Σ
i = 1
p
+
θ
j
a
t - j
Σ
j = 1
q
Lecture 14: CUSUM and EWMA
Spanos
EE290H F05
25
Summary so far…
While simple control charts are great tools for visualizing
the process,it is possible to look at them from another
perspective:
Control charts are useful “summaries” of the process
statistics.
Charts can be designed to increase sensitivity without
sacrificing type I error.
It is this type of advanced charts that can form the
foundation of the automation control of the (near) future.
Next stop before we get there: multivariate and model-
based SPC!
Wyszukiwarka
Podobne podstrony:
Leki ukladu wspolczulnego id 26 Nieznany
legalne wzory kolokwium 5 id 26 Nieznany
2008 czerwiec (egzwst) (1)id 26 Nieznany
lab6 rozwiazywanie rownan id 26 Nieznany
F 14 fale sprezyste 2006 id 166 Nieznany
Laboratorium zadania cz 1 id 26 Nieznany
Laboratorium nr 3 funkcje id 26 Nieznany
Between Life and Death id 83155 Nieznany (2)
Laboratorium nr 2 tablice id 26 Nieznany
Laborant budowlany 311202 id 26 Nieznany
Leki ukladu wspolczulnego id 26 Nieznany
legalne wzory kolokwium 5 id 26 Nieznany
antropomotoryka 26 2004 id 6611 Nieznany (2)
cwiczenie 14 id 125164 Nieznany
Cwiczenia nr 10 (z 14) id 98678 Nieznany
5 14 id 39504 Nieznany (2)
piel 38 1 14 79 id 356923 Nieznany
B 14 id 74811 Nieznany (2)
więcej podobnych podstron