Jacek Kabziński
Automatyka i sterowanie
————————————————————————————————————————
2
Automatyka i sterowanie 11 Metody czestotliwosciowe
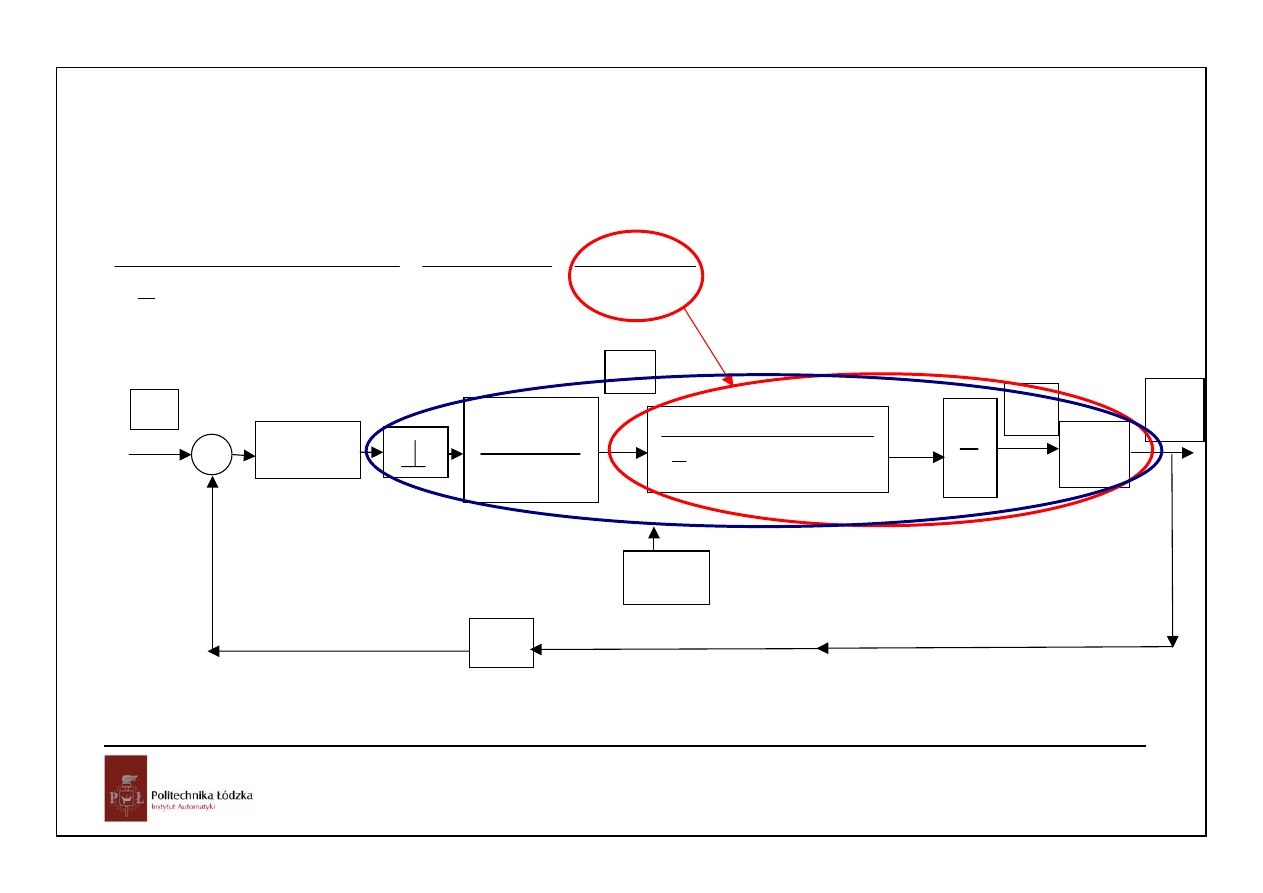
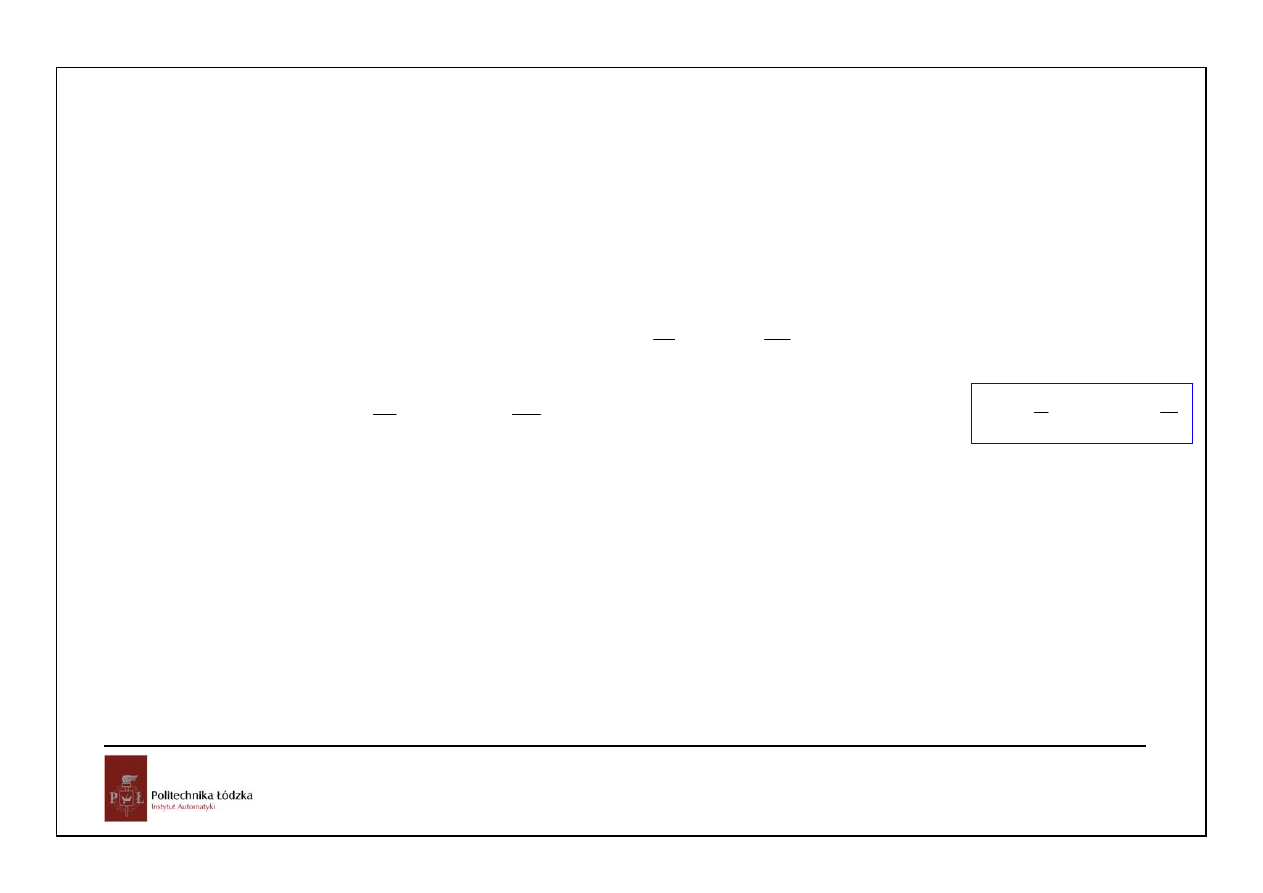
Układy czasu dyskretnego
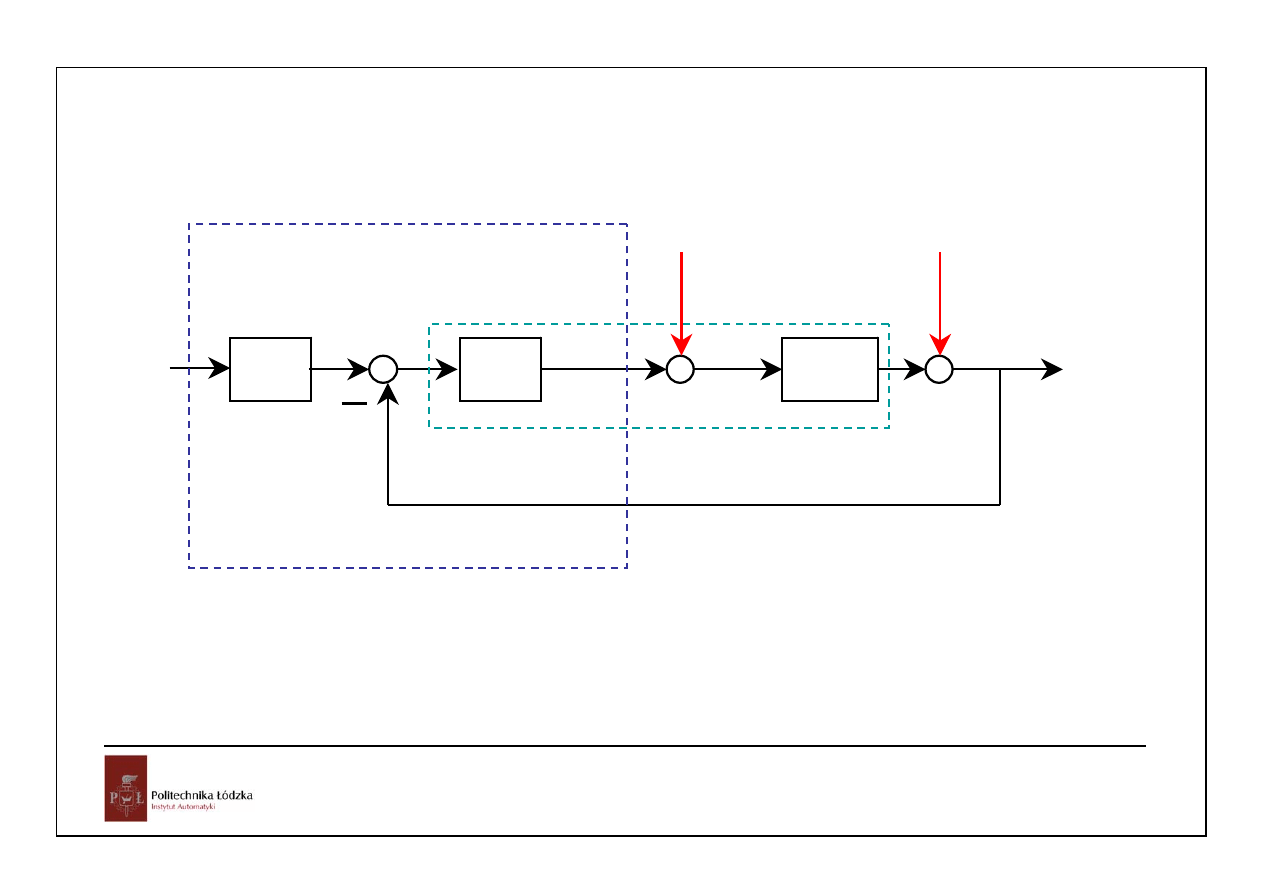
C(s)
P(s)
D(s)
R(s)
Y(s)
E(s)
U(s)
regulator
obiekt
N(s)
F(s)
v(s)
n(s)
F(s)=1 – sprz. od uchybu
3
Automatyka i sterowanie 11 Metody czestotliwosciowe
Układy czasu dyskretnego
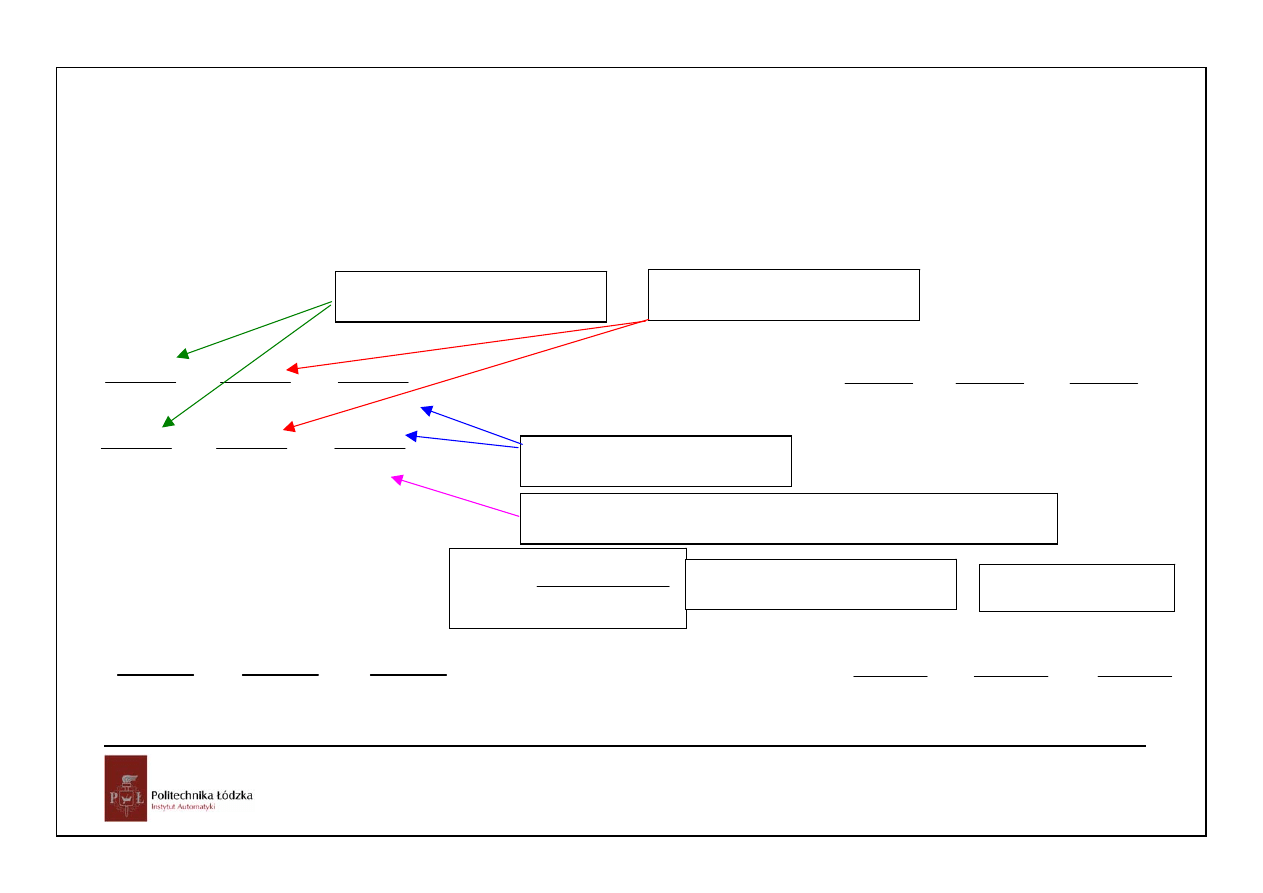
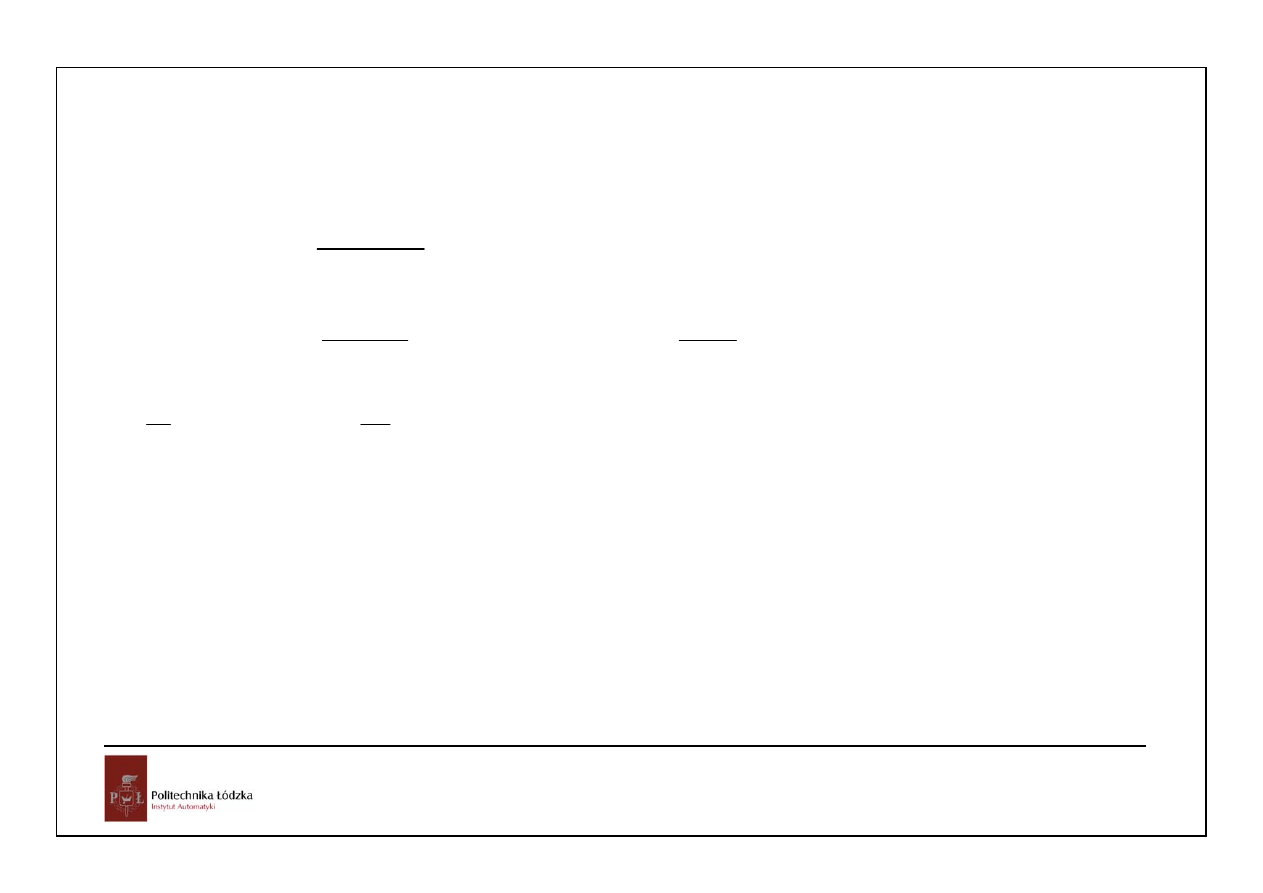
6 transmitancji:
YN
T
,
YD
T
,
YR
T
;
N
PC
D
PC
P
R
PC
FPC
Y
+
+
+
+
+
=
1
1
1
1
,
N
PC
PC
D
PC
P
R
PC
FPC
n
+
−
+
+
+
+
=
1
1
1
,
N
PC
C
D
PC
R
PC
FC
v
+
−
+
+
+
+
=
1
1
1
1
,
UN
T
,
UD
T
,
UR
T
:
N
PC
C
D
PC
PC
R
PC
FC
U
+
−
+
+
−
+
+
=
1
1
1
,
N
PC
D
PC
P
R
PC
F
E
+
−
+
+
−
+
+
=
1
1
1
1
Na sygnał zadający
Na szum pomiarowy
Na zakłócenie
P(s)C(s) Transmitancja układu otwartego
1
1
S( s )
P( s )C( s )
=
+
funkcja wrażliwości
1
YR
S( s ) T ( s )
+
=
4
Automatyka i sterowanie 11 Metody czestotliwosciowe
Układy czasu dyskretnego
Metoda częstotliwościowa dla układów dyskretnych w czasie
Transmitancja widmowa
)
sin(
)
(
t
U
t
u
ω
=
,
)
sin(
)
(
T
k
U
kT
u
ω
=
T
Ue
Ue
kT
U
i
jk
kT
j
i
ω
ω
ω
ω
=
=
=
)
(
~
i
j
e
z
z
U
z
G
z
U
z
G
z
Y
ω
−
=
=
)
(
)
(
~
)
(
)
(
~
ustalona część odpowiedzi:
i
i
i
i
j
jk
j
k
j
e
z
ust
Ue
e
G
z
e
z
z
U
z
G
s
kT
y
ω
ω
ω
ω
)
(
)
(
Re
)
(
~
1
=
⎭
⎬
⎫
⎩
⎨
⎧
−
=
−
=
=
))
(
arg(
(
)
(
i
j
i
i
e
G
k
j
j
Ue
e
G
ω
ω
ω
+
)))
(
arg(
sin(
)
(
)
(
i
i
j
j
ust
e
G
T
k
U
e
G
kT
y
ω
ω
ω
+
=
)
(
)
(
i
i
j
j
e
z
e
G
z
G
ω
ω
=
=
- transmitancja widmowa
)
(
i
j
G
ω
• okresowa o okresie T
•
)
(
)
(
)
(
i
i
i
jQ
P
j
G
ω
ω
ω
+
=
5
Automatyka i sterowanie 11 Metody czestotliwosciowe
Układy czasu dyskretnego
•
)
(
)
(
i
i
P
P
ω
ω
=
−
)
(
)
(
i
i
Q
Q
ω
ω
−
=
−
charakterystyki częstotliwościowe:
amplitudowo-fazowa, amplitudowa, fazowa,
logarytmiczne
– bezpośrednie przeniesienie metody wykresów Bodego z układów ciągłych niemożliwe
6
Automatyka i sterowanie 11 Metody czestotliwosciowe
Układy czasu dyskretnego
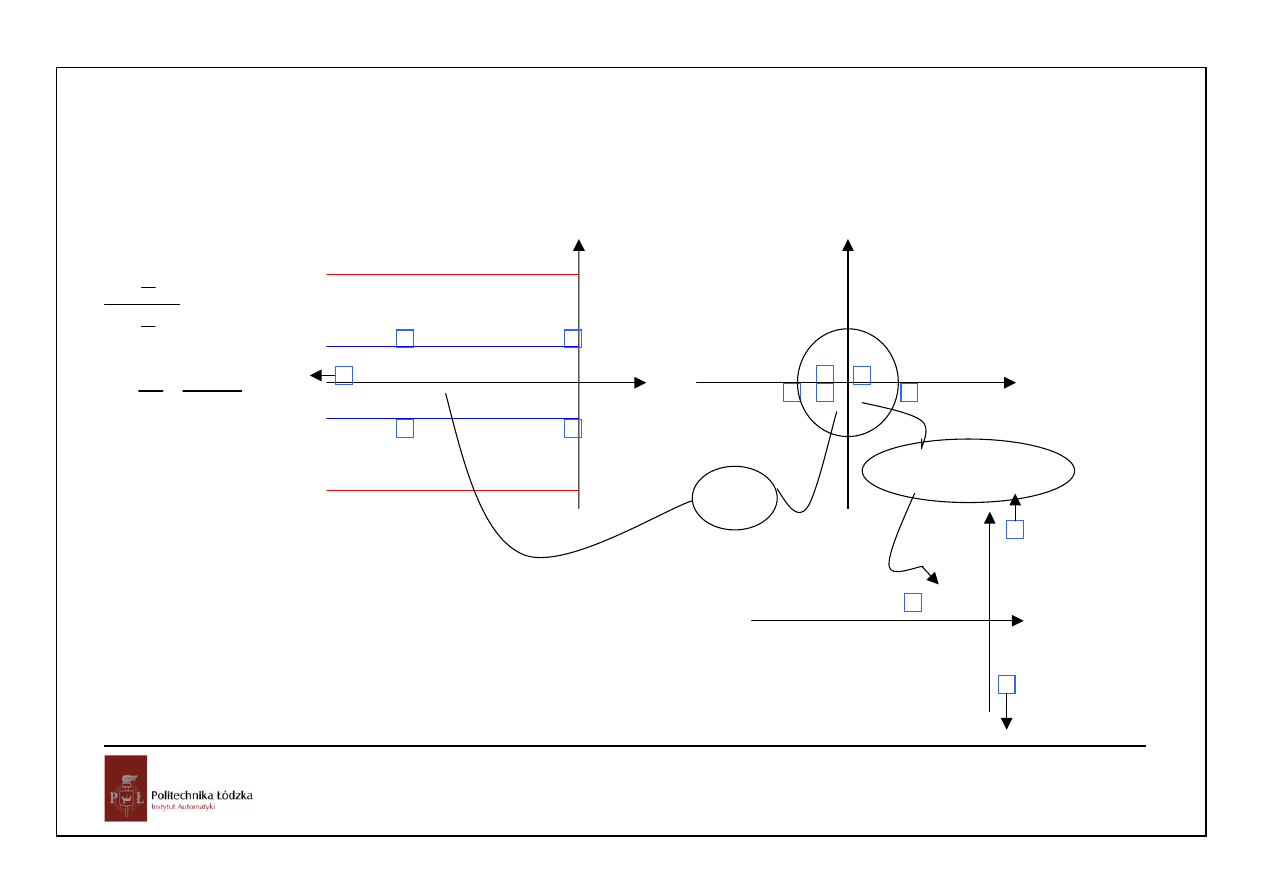
Stosuje się
przekształcenie dwuliniowe:
w
w
z
T
T
2
2
1
1
−
+
=
,
⎟
⎠
⎞
⎜
⎝
⎛
+
−
=
1
1
2
z
z
T
w
c
a
a
b
c
d
d
e
e
Płaszczyzna z
Płaszczyzna s
-jω
i
/2
-3jω
i
/2
jω
i
/2
3jω
i
/2
Płaszczyzna w
f
f
a
-2/T
f
z=e
Ts
w=(2/T)(z-1)/(z+1)
7
Automatyka i sterowanie 11 Metody czestotliwosciowe
Układy czasu dyskretnego
⎟
⎠
⎞
⎜
⎝
⎛
+
−
=
1
1
2
z
z
T
w
,
ν
j
w
=
odpowiada punktom
T
j
i
j
e
z
T
e
z
i
ω
ω
ω
ω
=
=
=
,
,
⎟
⎠
⎞
⎜
⎝
⎛
=
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
−
−
=
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
+
−
=
−
2
tan
2
2
1
1
2
5
.
0
5
.
0
5
.
0
5
.
0
T
j
T
e
e
e
e
T
e
e
T
j
T
j
T
j
T
j
T
j
T
j
T
j
ω
ν
ω
ω
ω
ω
ω
ω
⎟
⎠
⎞
⎜
⎝
⎛
=
2
tan
2
T
T
ω
ν
- związek fikcyjnej pulsacji z płaszczyzny w i prawdziwej z płaszczyzny z(s)
Dla małych T
ω
ν
≈
. Dokładniej
ω
ν
≈
jeśli
2
2
T
T
tan
ω
ω
⎛
⎞ ≈
⎜
⎟
⎝
⎠
. Gdy
2
10
T
ω
π
<
, czyli
8
Automatyka i sterowanie 11 Metody czestotliwosciowe
Układy czasu dyskretnego
1 2
10 T
π
ω
<
błąd nie przekracza 4%
1. Wyznaczyć transmitancję dyskretną obiektu G(z)
2. Wyznaczyć G(w) po zastosowaniu transformacji dwuliniowej – T dostatecznie małe (10 razy pasmo
przenoszenia układu zamkniętego.
3. Podstawić
,
ν
j
w
=
wykreślić charakterystyki logarytmiczne
)
(
ν
j
G
.
4. Zaprojektować charakterystyki regulatora
)
(
ν
j
G
R
, pamiętając o przeskalowanej pulsacji
⎟
⎠
⎞
⎜
⎝
⎛
=
2
tan
2
T
T
ω
ν
.
5. Wyznaczyć transmitancję regulatora
)
(z
G
R
po zastosowaniu transformacji dwuliniowej
⎟
⎠
⎞
⎜
⎝
⎛
+
−
=
1
1
2
z
z
T
w
do
)
(w
G
R
.
6. Zrealizować algorytm
)
(z
G
R
.
9
Automatyka i sterowanie 11 Metody czestotliwosciowe
Układy czasu dyskretnego
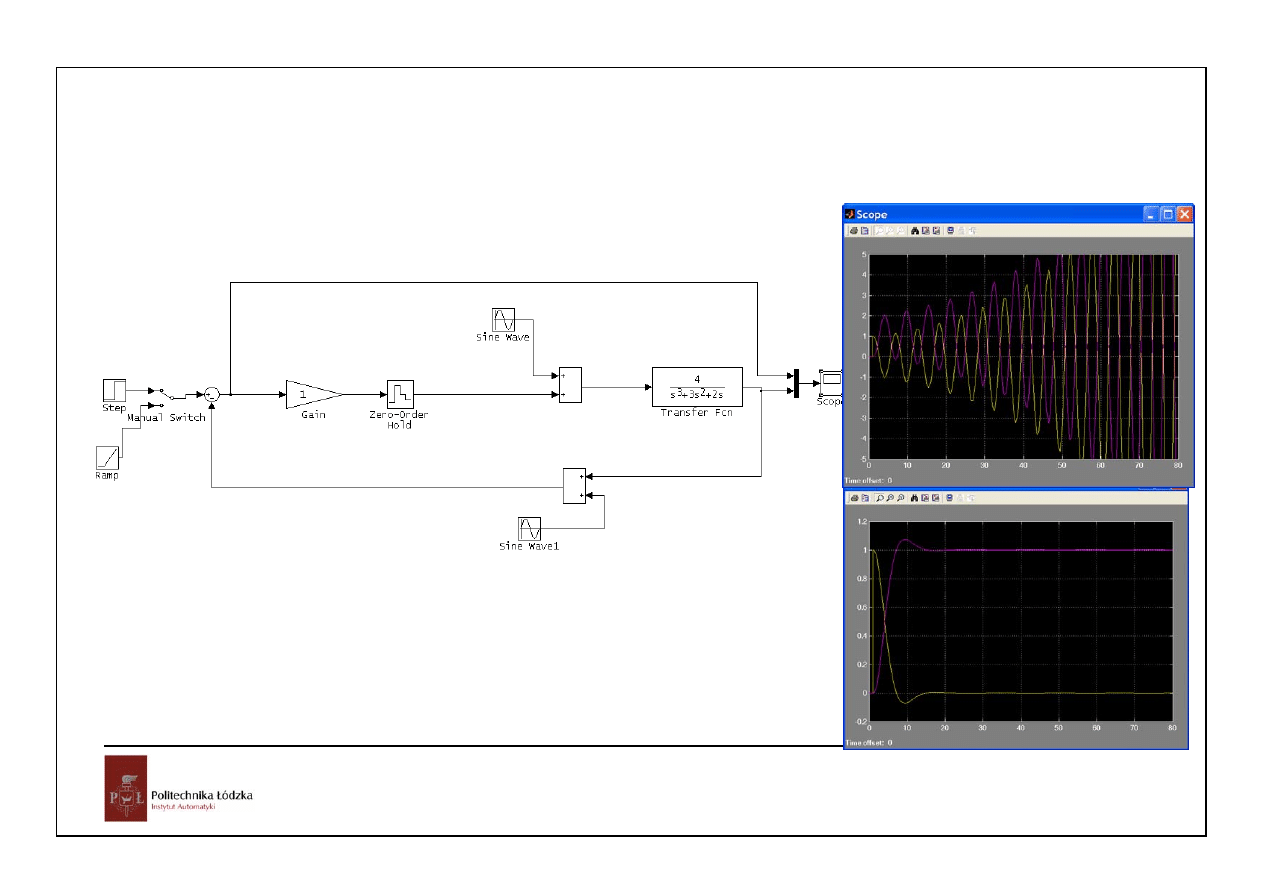
(
)
0
2
4
4
1
2
3
2
1
a
u
m
K
T
s( s
)( s
)
s( s
s
)
L
s
JRs RB
K K
s
R
θ
τ
=
=
=
+
+
+ +
⎛
⎞
⎛
⎞
+
+
+
⎜
⎟
⎜
⎟
⎝
⎠
⎝
⎠
,
T=0.5!
C( z )
(
)
1
m
K
L
s
JRs RB
K K
R
τ
τ
⎛
⎞
+
+
+
⎜
⎟
⎝
⎠
1
sT
e
s
−
−
1
−
1
s
θ
u
p
K
a
θ
r
G(z)
10
Automatyka i sterowanie 11 Metody czestotliwosciowe
Układy czasu dyskretnego
(
)
1
1
2
2
2
4
2
3
4
1
2
3 4
1
1
1
2
1
2
t
t
L
L
t
e
e
( t )
s ( s
)( s
)
s
s
( s
) ( s
)
−
−
−
−
⎧
⎫
⎧
⎫
−
−
=
+
+
+
=
− +
−
⎨
⎬
⎨
⎬
+
+
+
+
⎩
⎭
⎩
⎭
{
} {
}
(
)
(
)
2
0 5
2
0 5
1
2
2
3 4
1
3 4
1
3
4
1
1
3
4
1
0 6065
0 3679
1
kT
kT
. k
k
.
z
z
z
z
Z kT
e
e
Z k
e
e
z
z e
z e
z
z
z
z
z
z
z
.
z
.
z
−
−
−
−
−
−
− +
−
=
− +
−
=
−
+
−
=
−
−
−
−
=
−
+
−
−
−
−
−
(
)
(
)(
)(
)
2
2
2
3
2
1
1
3
4
1
0 6065
0 3679
1
0 05824
0 1629
0 02753
0 05824
0 1629
0 02753
1 9744
1 1975
0 2231
1
0 6065
0 3679
z
z
z
z
G( z )
z
z
z
.
z
.
z
.
z
.
z
.
.
z
.
z
.
z
.
z
.
z
.
z
z
.
z
.
⎛
⎞
⎛
⎞
= −
−
+
−
=
⎜
⎟
⎜
⎟⎜
⎟
−
−
−
⎝
⎠
−
⎝
⎠
+
+
+
+
=
=
−
+
−
−
−
−
11
Automatyka i sterowanie 11 Metody czestotliwosciowe
Układy czasu dyskretnego
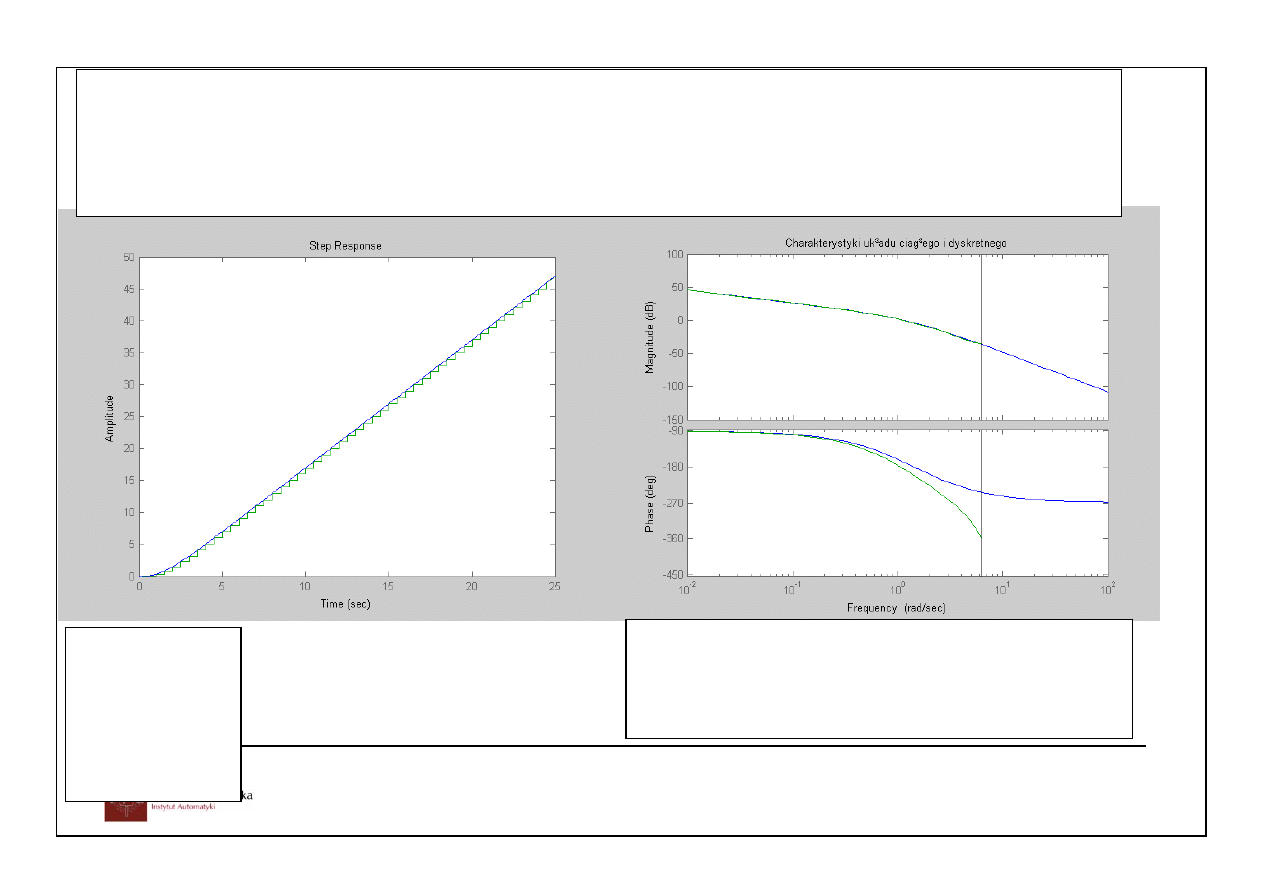
figure(1)
step(P)
hold on
step(G)
hold off
Ti=0.5; disp('transmitancja obiektu')
P=tf(4,[1 3 2 0])
disp('transmitancja dyskretna')
G=tf([0.05824 0.1629 0.02753], [1 -1.9744 1.1975 -0.2231],Ti)
bode(P,G)
title('Charakterystyki układu ciągłego i
dyskretnego')
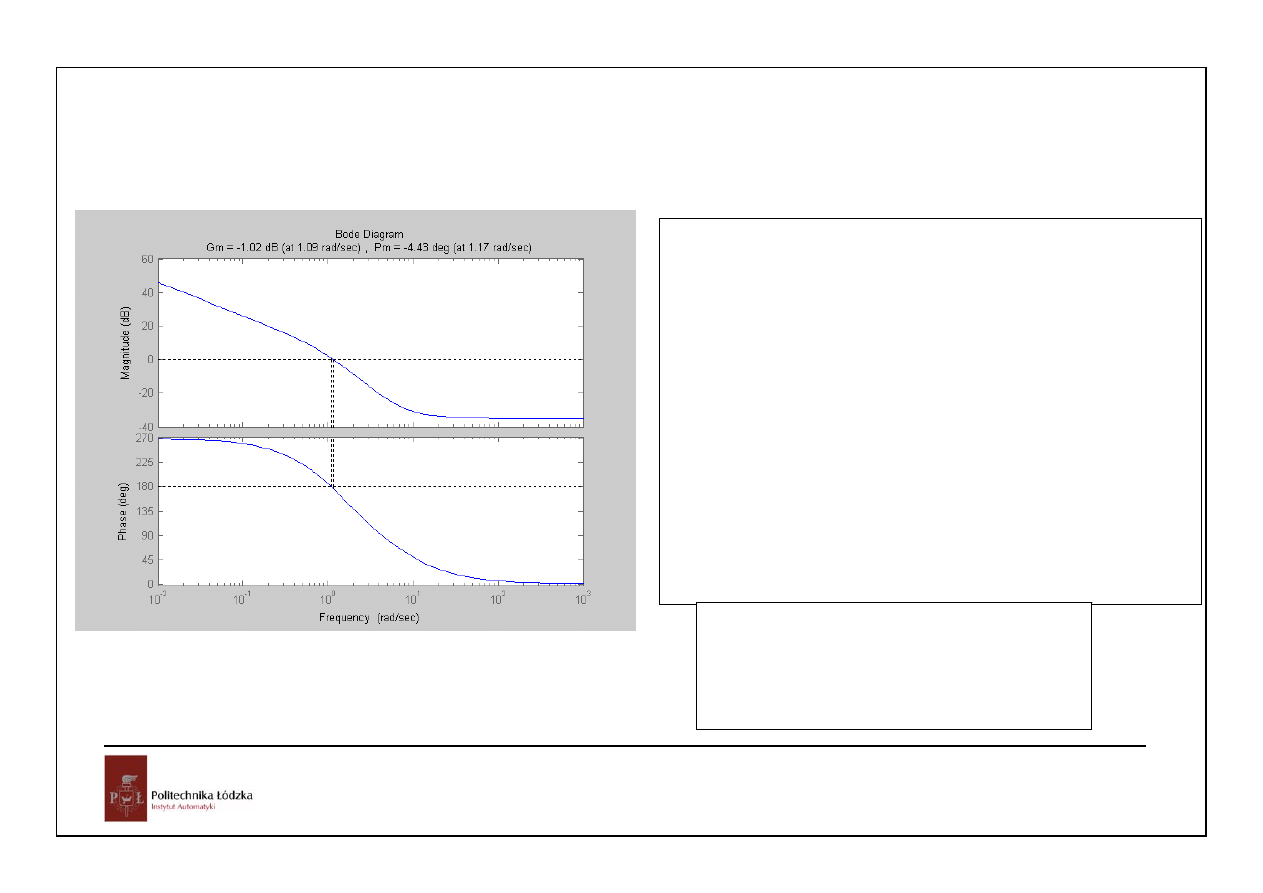
12
Automatyka i sterowanie 11 Metody czestotliwosciowe
Układy czasu dyskretnego
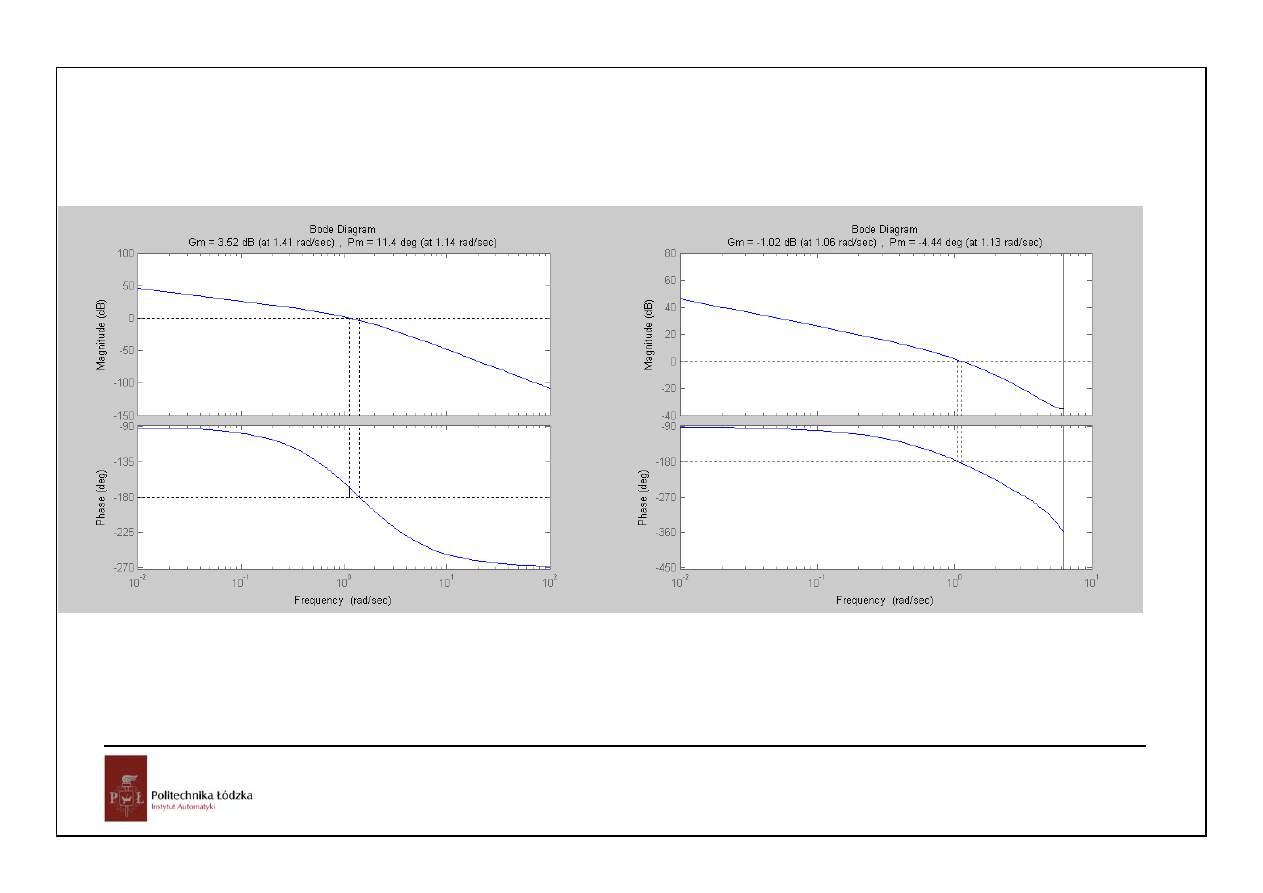
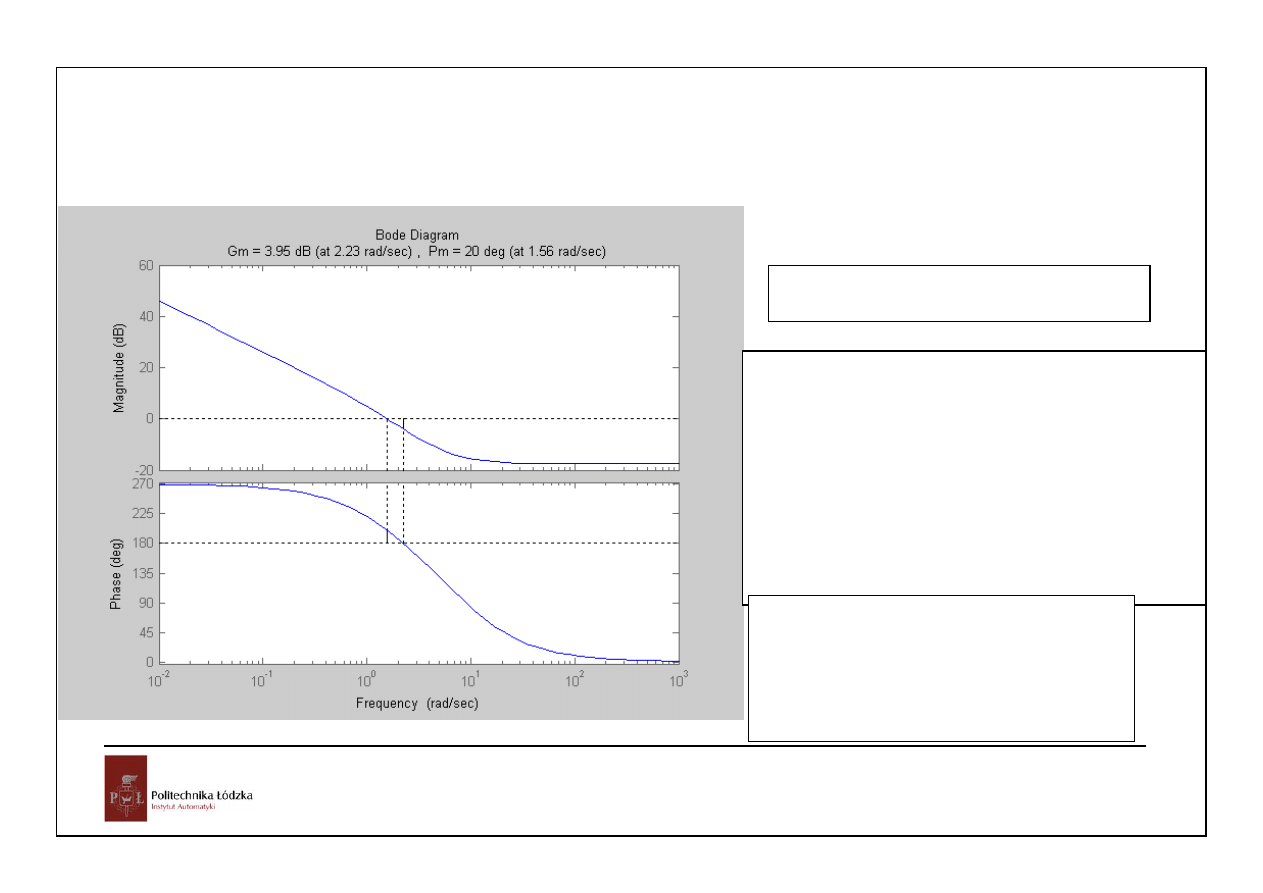
figure(3); margin(P)
figure(4); margin(G)
13
Automatyka i sterowanie 11 Metody czestotliwosciowe
Układy czasu dyskretnego
C(s)=0.16
14
Automatyka i sterowanie 11 Metody czestotliwosciowe
Układy czasu dyskretnego
% po przekształceniu dwuliniowym
syms z;
PS=poly2sym([0.05824 0.1629 0.02753],z)/poly2sym([1 -1.9744
1.1975 -0.2231],z);
syms w;
PWS=factor(subs(PS,z,(1+w*Ti/2)/(1-w*Ti/2)));
[n d]=numden(PWS);
n=expand(n);
d=expand(d);
d=sym2poly(d);d1=d(1);
d=d/d1;
n=sym2poly(n);
n=n/d1;
disp('transmitancja płaszczyzny w')
PW=tf(n,d)
figure(5)
margin(PW)
transmitancja płaszczyzny w
Transfer function:
0.01755 s^3 - 0.1261 s^2 - 0.6817 s + 3.621
-------------------------------------------
s^3 + 2.828 s^2 + 1.811 s
15
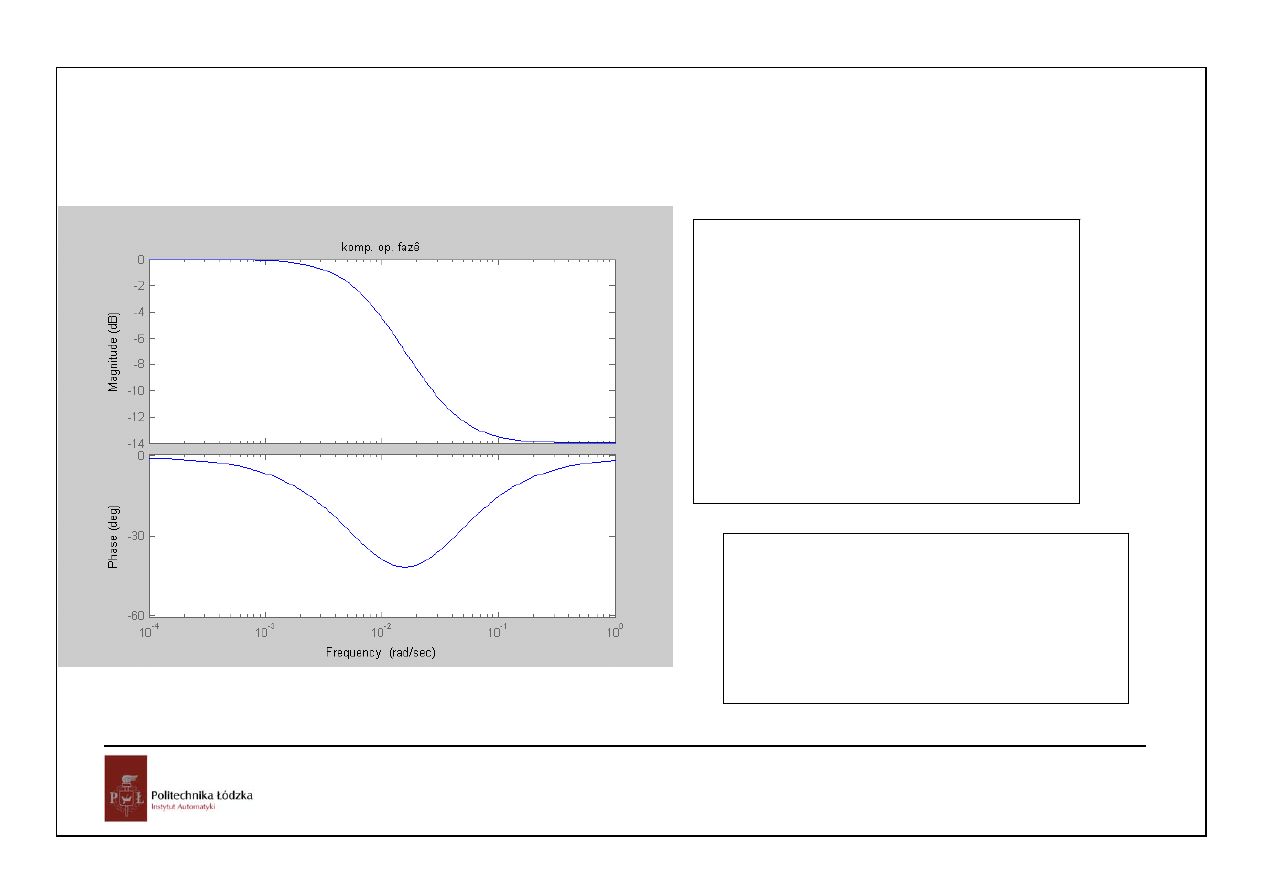
Automatyka i sterowanie 11 Metody czestotliwosciowe
Układy czasu dyskretnego
%opóźniajacy fazę
KD=0.2
alfa=5
T=1/0.035
disp('transmitancja komp. op. fazę pł. w')
D=tf(KD*alfa*[T 1],[alfa*T 1])
figure(6)
bode(D)
title('komp. op. fazę')
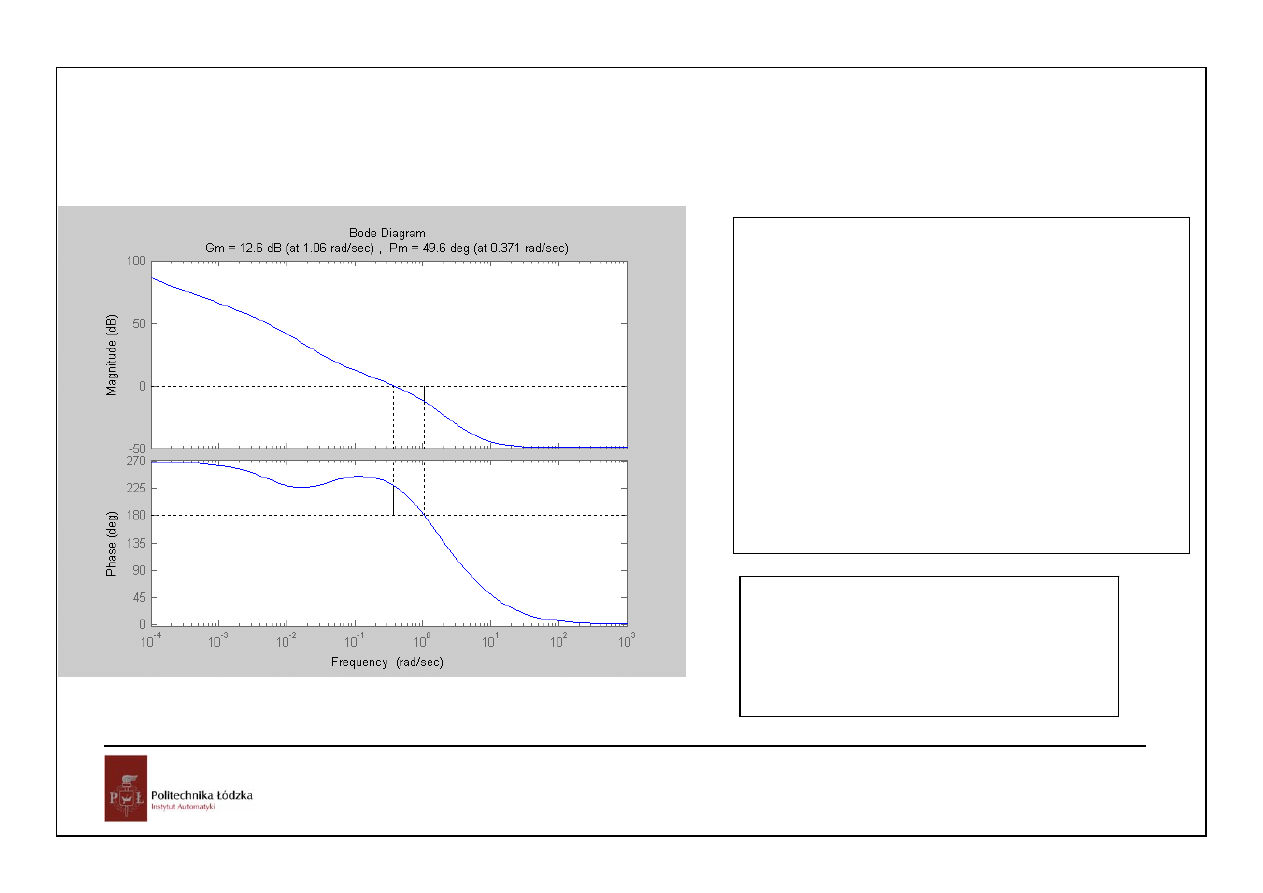
figure(7)
margin(series(D,PW))
transmitancja komp. op. fazę pł. w
Transfer function:
28.57 s + 1
-----------
142.9 s + 1
16
Automatyka i sterowanie 11 Metody czestotliwosciowe
Układy czasu dyskretnego
%powrót do z
DS=poly2sym(KD*alfa*[T 1],w)/poly2sym([alfa*T 1],w);
DZS=factor(subs(DS,w,(2/Ti)*(z-1)/(z+1)));
[n d]=numden(DZS);
n=expand(n);
d=expand(d);
d=sym2poly(d);d1=d(1);
d=d/d1;
n=sym2poly(n);
n=n/d1;
disp('transmitancja komp. op. faz. płaszczyzny z')
DZ=tf(n,d,Ti)
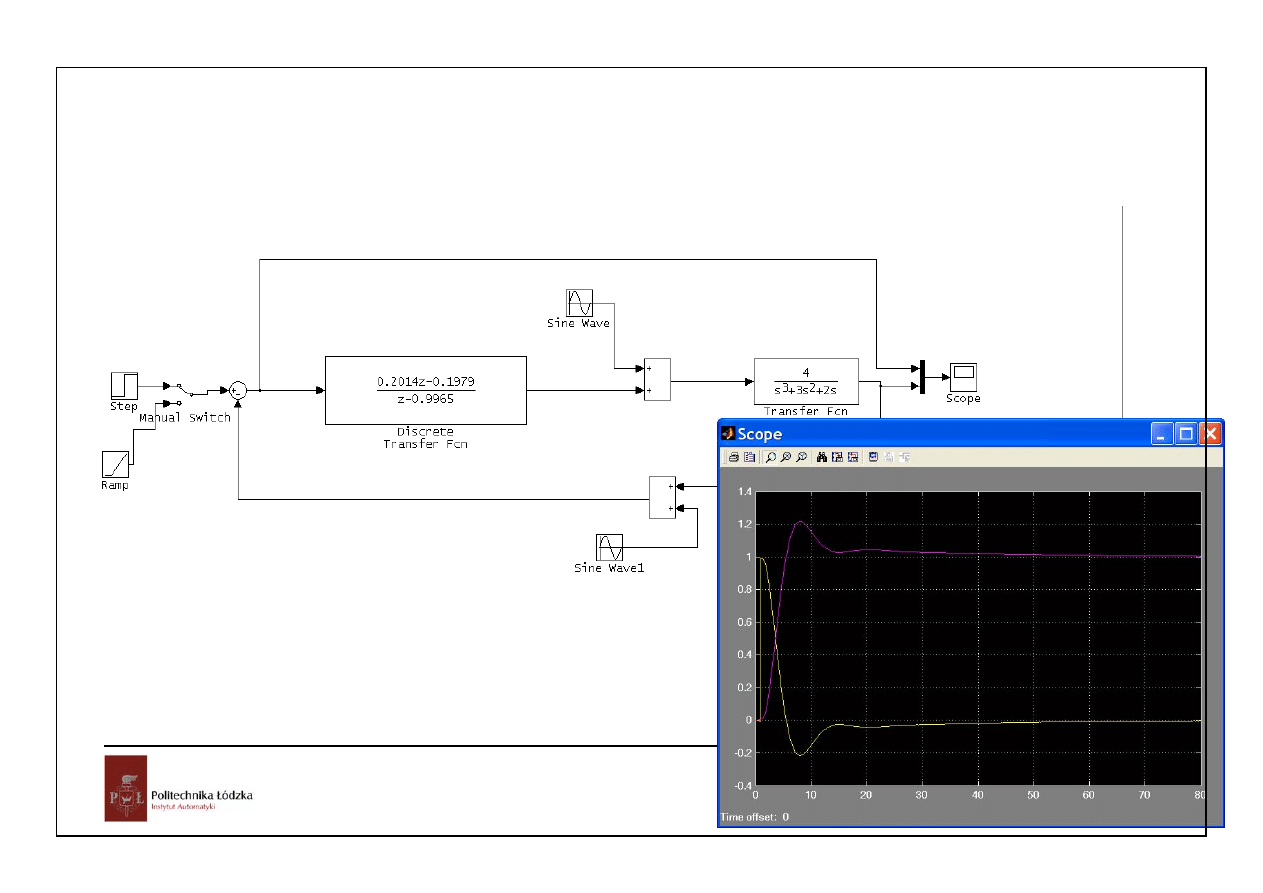
transmitancja komp. op. faz. płaszczyzny z
Transfer function:
0.2014 z - 0.1979
-----------------
z - 0.9965
17
Automatyka i sterowanie 11 Metody czestotliwosciowe
Układy czasu dyskretnego
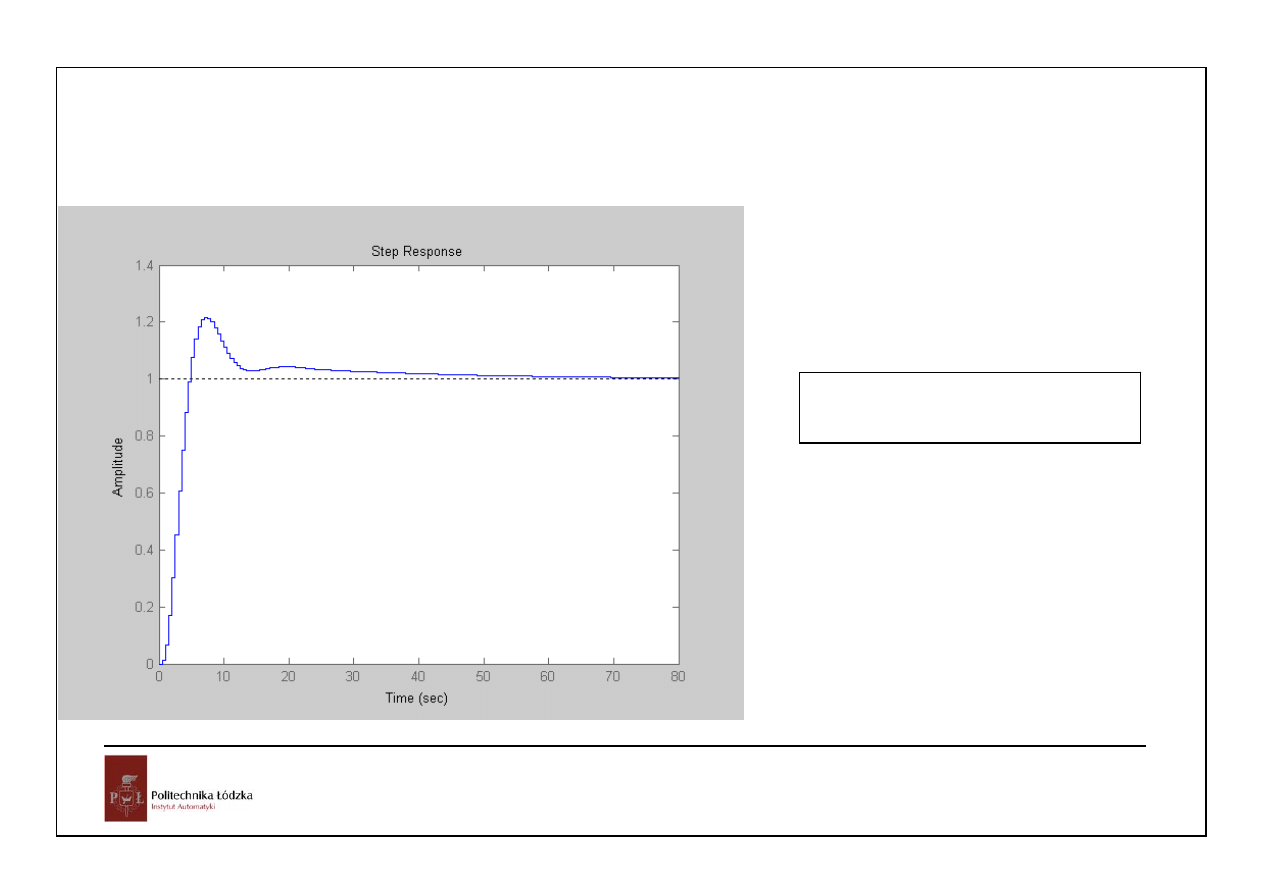
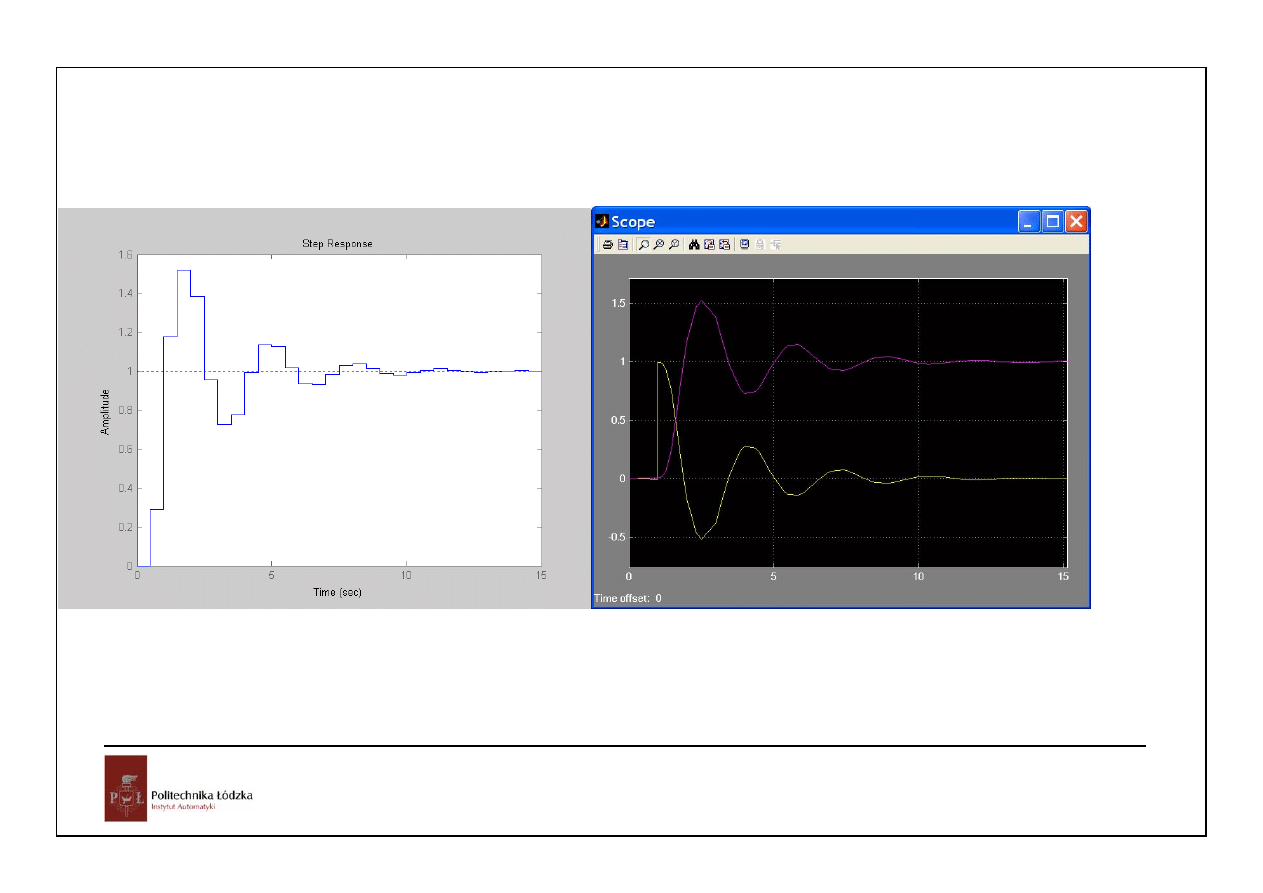
figure(8)
step(feedback(series(DZ,G),1))
18
Automatyka i sterowanie 11 Metody czestotliwosciowe
Układy czasu dyskretnego
19
Automatyka i sterowanie 11 Metody czestotliwosciowe
Układy czasu dyskretnego
% przyśp fazę
Tp=1/1.1
alfap=(1-sin(pi*50/180))/(1+sin(pi*50/180))
K=1
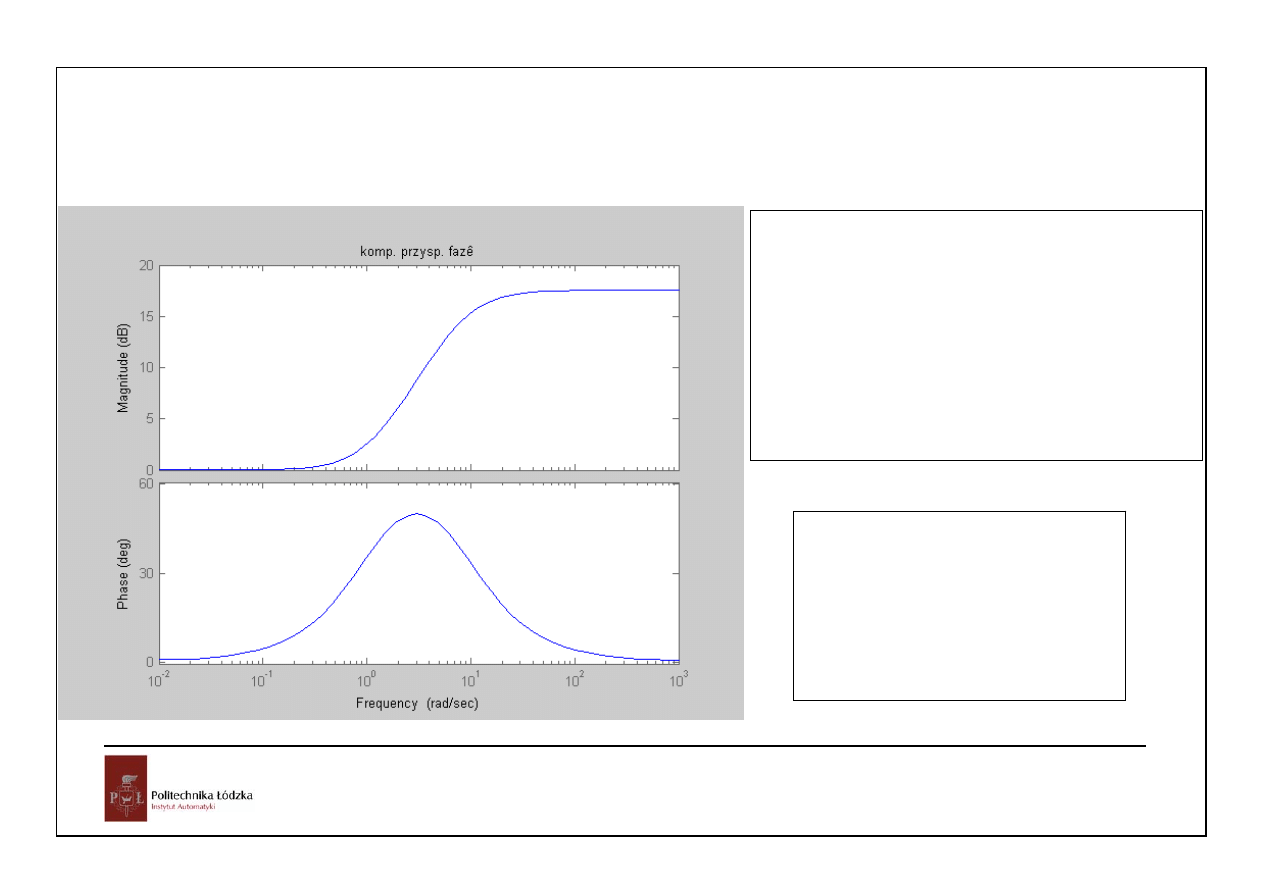
disp('transmitancja komp. przyśp. fazę pł. w')
%COMPp=tf([1.154 1],[0.03329 1])
COMPp=K*tf([Tp 1],[alfap*Tp 1])
figure(9)
bode(COMPp)
transmitancja komp. przyśp. fazę pł. w
Transfer function:
0.9091 s + 1
------------
0.1204 s + 1
20
Automatyka i sterowanie 11 Metody czestotliwosciowe
Układy czasu dyskretnego
figure(10)
margin(series(COMPp,PW)
COMPpZS=factor(subs(COMPpS,w,(2/Ti)*(z-1)/(z+1)));
[n d]=numden(COMPpZS);
n=expand(n);
d=expand(d);
d=sym2poly(d);d1=d(1);
d=d/d1;
n=sym2poly(n);
n=n/d1;
disp('transmitancja komp. pzysp. faz. płaszczyzny z')
COMPpZ=tf(n,d,Ti)
transmitancja komp. przysp. faz. płaszczyzny z
Transfer function:
4.956 z - 3.191
---------------
z + 0.765
21
Automatyka i sterowanie 11 Metody czestotliwosciowe
Układy czasu dyskretnego
22
Automatyka i sterowanie 11 Metody czestotliwosciowe
Układy czasu dyskretnego
Dyskretny regulator PID:
⎥
⎦
⎤
⎢
⎣
⎡
+
+
=
∫
)
t
(
e
dt
d
T
d
)
(
e
T
)
t
(
e
k
)
t
(
u
d
t
i
p
0
1
τ
τ
,
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
+
+
=
d
i
p
sT
sT
k
)
s
(
C
1
1
Algorytm I (pozycyjny)
kwadratura prostokątów – wariant punktu początkowego
0
1
k
p
d
i
i
T
e( kT ) e(( k
)T )
u( kT ) k e( kT )
e( iT ) T
T
T
=
⎛
⎞
−
−
=
+
+
⎜
⎟
⎝
⎠
∑
∑
=
=
k
i
)
iT
(
e
:
)
kT
(
0
α
,
)
kT
(
e
)
T
)
k
((
)
kT
(
=
−
−
1
α
α
)
z
(
e
)
z
(
z
)
z
(
=
−
−
α
α
1
,
)
z
(
e
z
z
)
z
(
1
−
=
α
1
1
1
d
p
i
T z
T z
u( z ) k
e( z )
T z
T
z
⎛
⎞
−
=
+
+
⎜
⎟
−
⎝
⎠
23
Automatyka i sterowanie 11 Metody czestotliwosciowe
Układy czasu dyskretnego
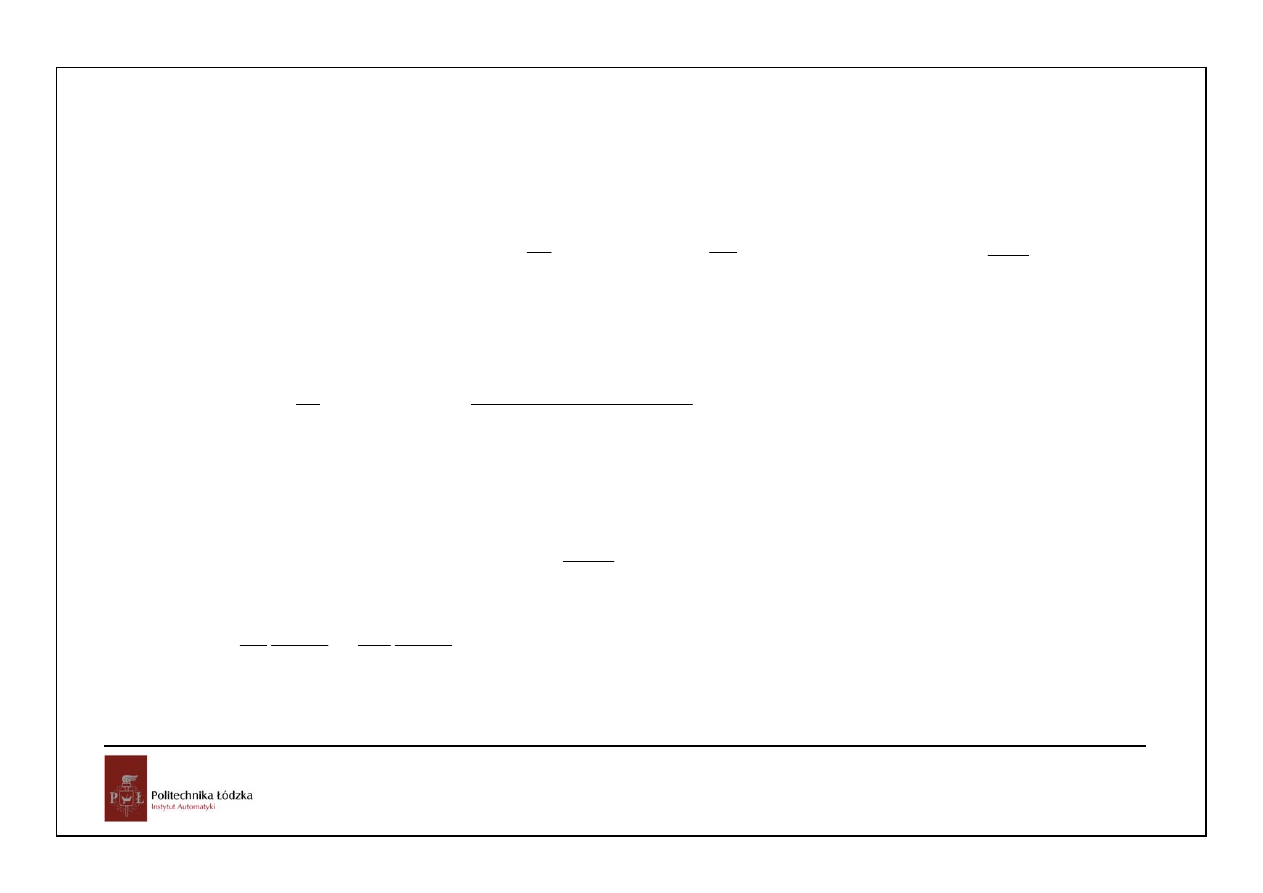
T
D
=1, kp=1.6, Ti =1/0.04, T=0.1, 0.35
24
Automatyka i sterowanie 11 Metody czestotliwosciowe
Układy czasu dyskretnego
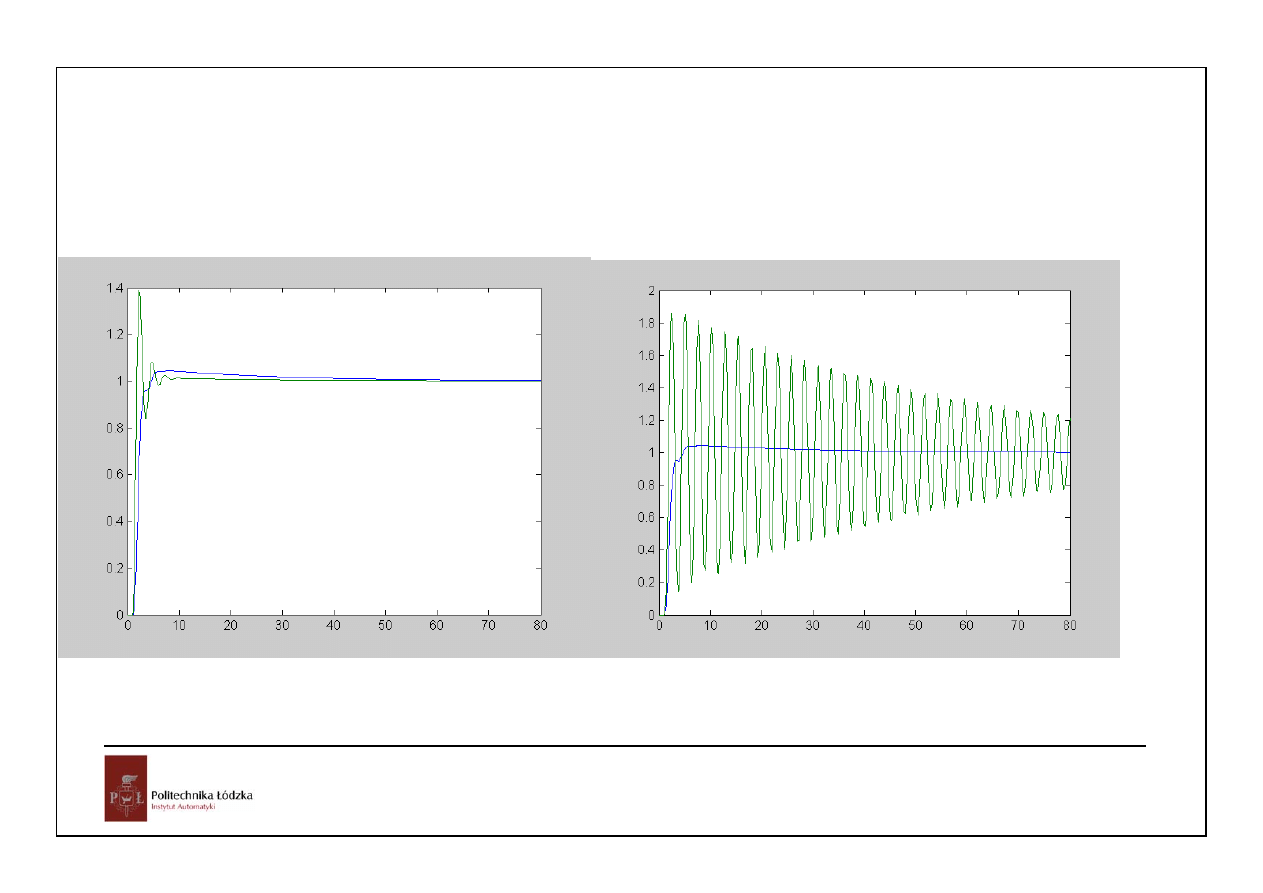
T
D
=0, kp=1.6, Ti =1/0.04, T= 0.35,
T=0.5
25
Automatyka i sterowanie 11 Metody czestotliwosciowe
Układy czasu dyskretnego
Algorytm II (pozycyjny)
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
+
+
=
∫
)
t
(
e
dt
d
T
d
)
(
e
T
)
t
(
e
K
)
t
(
u
d
t
i 0
1
τ
τ
kwadratura trapezów
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
−
−
+
+
−
+
=
∑
=
T
)
T
)
k
((
e
)
kT
(
e
T
)
iT
(
e
)
T
)
i
((
e
T
T
)
kT
(
e
K
)
kT
(
u
d
k
i
i
1
2
1
1
∑
=
+
−
=
k
i
)
iT
(
e
)
T
)
i
((
e
:
)
kT
(
g
1
2
1
,
0
0
=
)
(
g
0
0
2
1
=
+
−
=
)
(
f
,
)
iT
(
e
)
T
)
i
((
e
:
)
iT
(
f
)
z
(
e
z
z
)
z
(
e
)
z
(
e
z
)
z
(
f
1
2
1
+
=
+
=
−
∑
=
=
k
i
)
iT
(
f
)
kT
(
g
1
26
Automatyka i sterowanie 11 Metody czestotliwosciowe
Układy czasu dyskretnego
)
kT
(
f
)
T
)
k
((
g
)
kT
(
g
=
−
−
1
)
z
(
f
)
z
(
g
z
)
z
(
g
=
−
−1
)
z
(
e
)
z
(
z
)
z
(
f
z
z
)
z
(
g
1
2
1
1
−
+
=
−
=
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
−
−
+
+
=
T
)
T
)
k
((
e
)
kT
(
e
T
)
kT
(
g
T
T
)
kT
(
e
K
)
kT
(
u
d
i
1
)
z
(
e
z
z
T
T
z
z
T
T
K
)
z
(
u
d
i
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
−
+
−
+
+
=
1
1
1
2
1
,
1
2
1
1
1
−
+
−
=
−
+
z
z
z
z
)
z
(
e
z
z
T
T
z
z
T
T
T
T
K
)
z
(
u
d
i
i
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
−
+
−
+
−
=
1
1
2
1
27
Automatyka i sterowanie 11 Metody czestotliwosciowe
Układy czasu dyskretnego
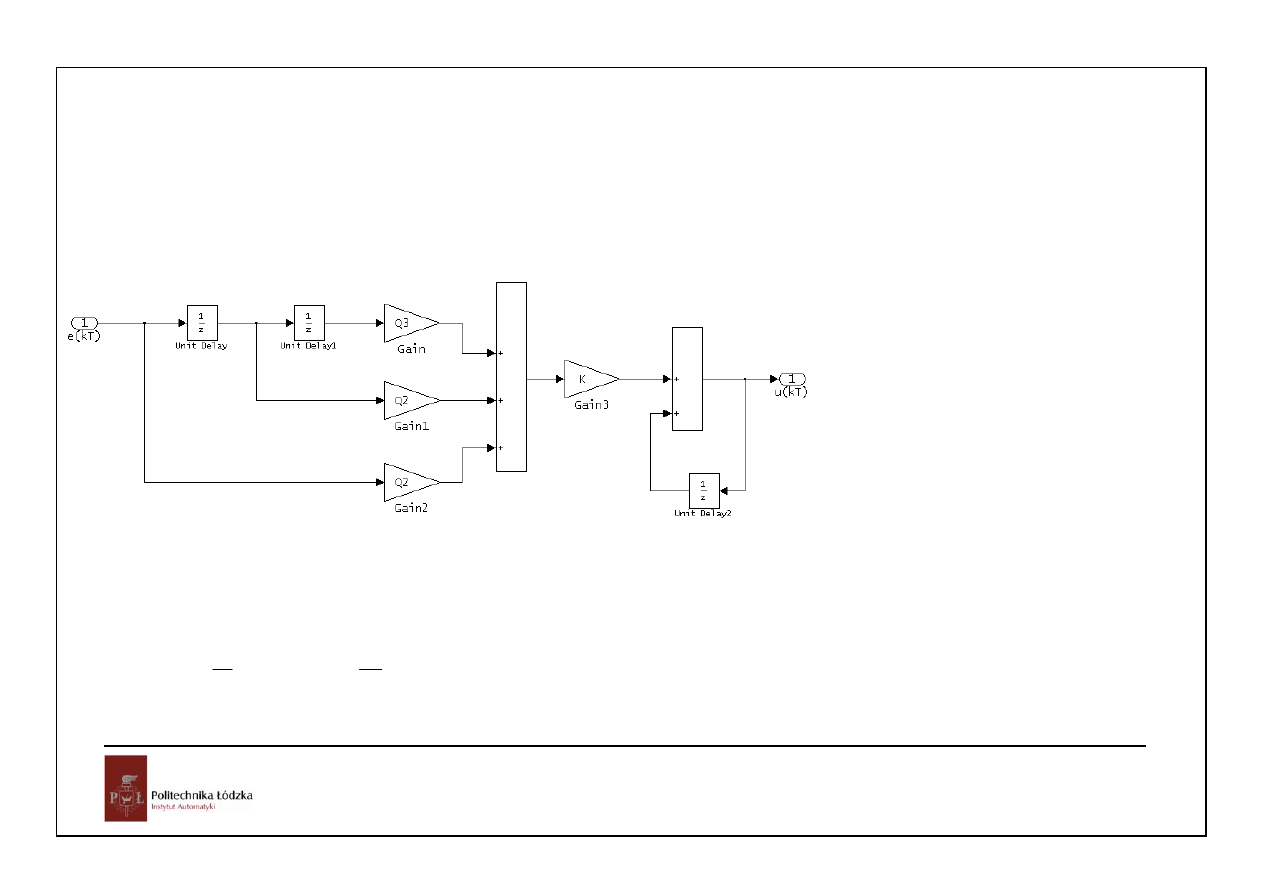
Algorytm III (prędkościowy):
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
+
+
=
∫
)
t
(
e
dt
d
T
d
)
(
e
T
)
t
(
e
K
)
t
(
u
d
t
i 0
1
τ
τ
(
)
1
1
2
1
2
d
i
T
T
u( kT ) u( kT ) u(( k
)T ) K e( kT ) e(( k
)T )
e( kT )
e( kT )
e(( k
)T ) e(( k
)T )
T
T
⎛
⎞
∇
=
−
−
=
−
−
+
+
−
−
+
−
⎜
⎟
⎝
⎠
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
+
−
⎟
⎠
⎞
⎜
⎝
⎛
−
−
+
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
+
+
=
)
T
)
k
((
e
T
T
)
T
)
k
((
e
T
T
)
kT
(
e
T
T
T
T
K
d
d
d
i
2
1
2
1
1
(
)
)
T
)
k
((
e
Q
)
T
)
k
((
e
Q
)
kT
(
e
Q
K
2
1
3
2
1
−
+
−
+
=
=
−
−
)
z
(
u
)
z
(
1
1
(
)
)
z
(
e
Q
z
Q
z
Q
K
3
2
2
1
1
−
−
+
+
28
Automatyka i sterowanie 11 Metody czestotliwosciowe
Układy czasu dyskretnego
Dla wolnozmiennych sygnałów zadających
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
+
+
=
∫
)
t
(
e
dt
d
T
d
)
(
e
T
)
t
(
e
K
)
t
(
u
d
t
i 0
1
τ
τ
29
Automatyka i sterowanie 11 Metody czestotliwosciowe
Układy czasu dyskretnego
)
kT
(
y
)
kT
(
y
)
kT
(
e
−
=
0
)
T
)
k
((
y
)
T
)
k
((
y
)
kT
(
y
2
1
0
0
0
−
=
−
=
(
)
1
1
2
1
2
d
i
T
T
u( kT ) u( kT ) u(( k
)T ) K e( kT ) e(( k
)T )
e( kT )
e( kT )
e(( k
)T ) e(( k
)T )
T
T
⎛
⎞
∇
=
−
−
=
−
−
+
+
−
−
+
−
⎜
⎟
⎝
⎠
(
)
(
)
)
T
)
k
((
e
)
T
)
k
((
e
)
kT
(
e
T
T
K
)
kT
(
e
T
T
K
)
T
)
k
((
e
)
kT
(
e
K
d
i
2
1
2
1
−
+
−
−
+
+
−
−
=
=
(
)
(
)
)
T
)
k
((
e
)
T
)
k
((
e
)
kT
(
e
K
)
kT
(
e
K
)
T
)
k
((
e
)
kT
(
e
K
d
i
2
1
2
1
−
+
−
−
+
+
−
−
=
=
(
)
(
)
(
)
0
1
2
1
2
i
d
K
y( kT ) y(( k
)T )
K y ( kT ) y( kT )
K
y( kT )
y(( k
)T ) y(( k
)T )
=
−
+
−
+
−
+
−
+
−
−
−
=
(
)
(
)
(
)
0
1
2
1
2
i
d
K y( kT ) y(( k
)T )
K y ( kT ) y( kT )
K y( kT )
y(( k
)T ) y(( k
)T )
= −
−
−
+
−
−
−
−
+
−
(
)
(
)
(
)
1
1
1
2
0
1
1
1 2
i
d
(
z )u( z )
K
z
y( z ) K y ( z ) y( z )
K
z
z
y( z )
−
−
−
−
−
= −
−
+
−
−
−
+
d
i
d
i
T
T
K
K
e( kT ) K
K
T
T
=
=
30
Automatyka i sterowanie 11 Metody czestotliwosciowe
Układy czasu dyskretnego
(
)
)
z
(
y
)
z
(
K
)
z
(
y
)
z
(
y
)
z
(
K
)
z
(
Ky
)
z
(
u
d
i
1
0
1
1
1
1
−
−
−
−
−
−
+
−
=
(
)
)
z
(
y
)
z
z
(
K
)
z
(
y
)
z
(
y
)
z
(
z
K
)
z
(
Ky
)
z
(
u
d
i
1
1
0
−
−
−
−
+
−
=
d
i
d
i
T
T
K
K
e( kT ) K
K
T
T
=
=
Wyszukiwarka
Podobne podstrony:
automatyka i sterowanie wyklad 11
automatyka i sterowanie wyklad 15
automatyka i sterowanie wyklad Nieznany (8)
automatyka i sterowanie wyklad Nieznany (2)
automatyka i sterowanie wyklad 3
automatyka i sterowanie wyklad Nieznany (7)
automatyka i sterowanie wyklad Nieznany (14)
automatyka i sterowanie wyklad 16
automatyka i sterowanie wyklad Nieznany (12)
automatyka i sterowanie wyklad Nieznany (16)
automatyka i sterowanie wyklad Nieznany (5)
automatyka i sterowanie wyklad 9
automatyka i sterowanie wyklad 4
automatyka i sterowanie wyklad 5
automatyka i sterowanie wyklad Nieznany (10)
automatyka i sterowanie wyklad Nieznany (3)
automatyka i sterowanie wyklad 8
automatyka i sterowanie wyklad 2
automatyka i sterowanie wyklad 15
więcej podobnych podstron