Jacek Kabziński
Automatyka i sterowanie
————————————————————————————————————————
2
Automatyka i sterowanie 10 Przykłady
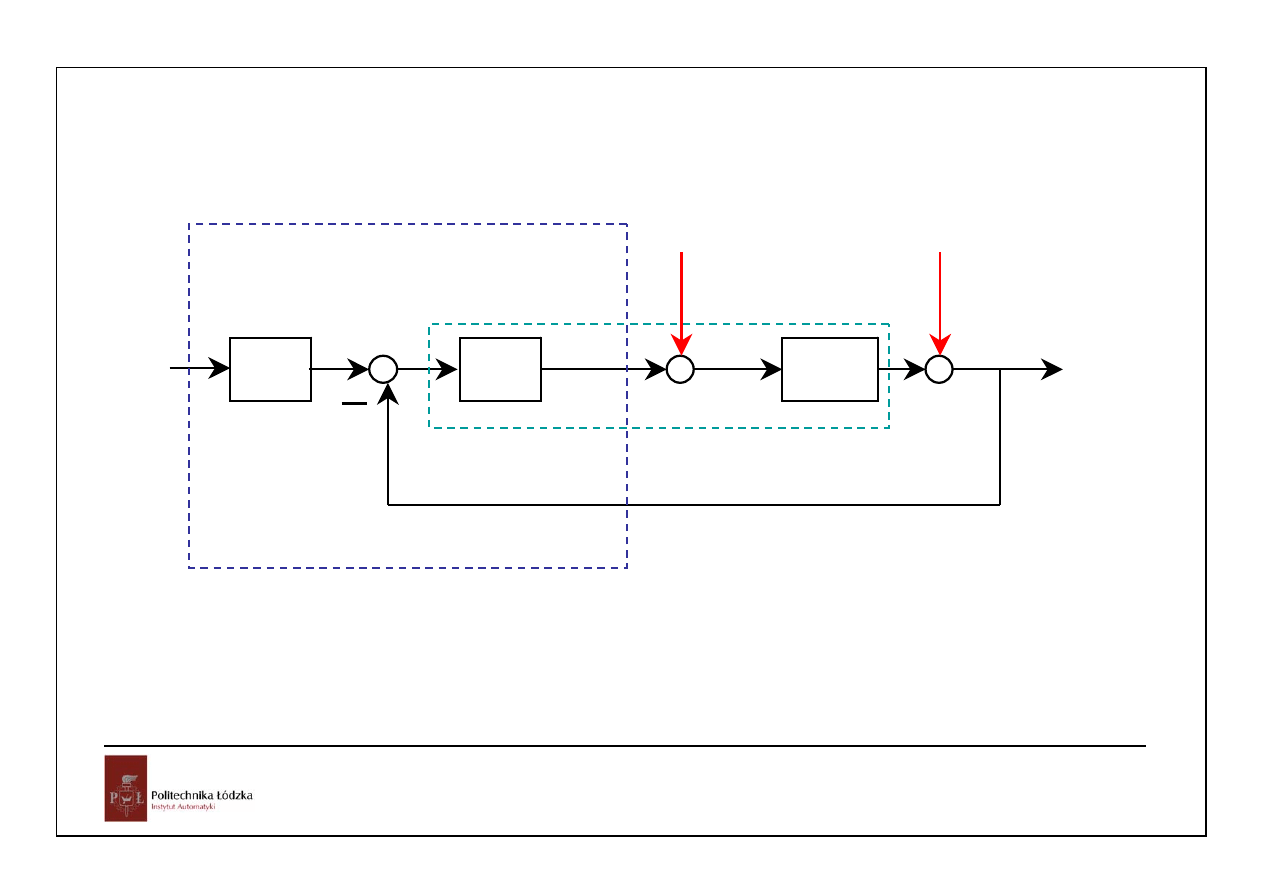
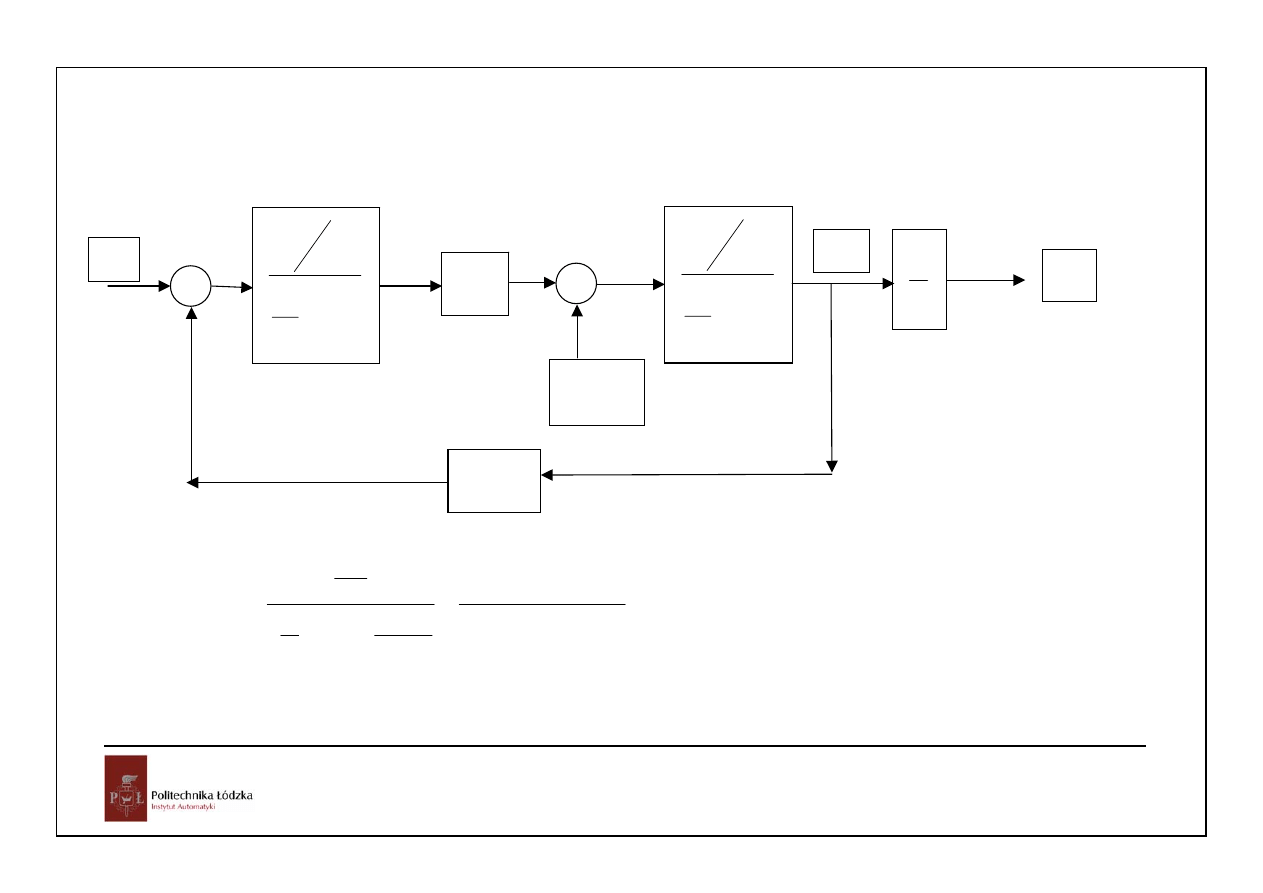
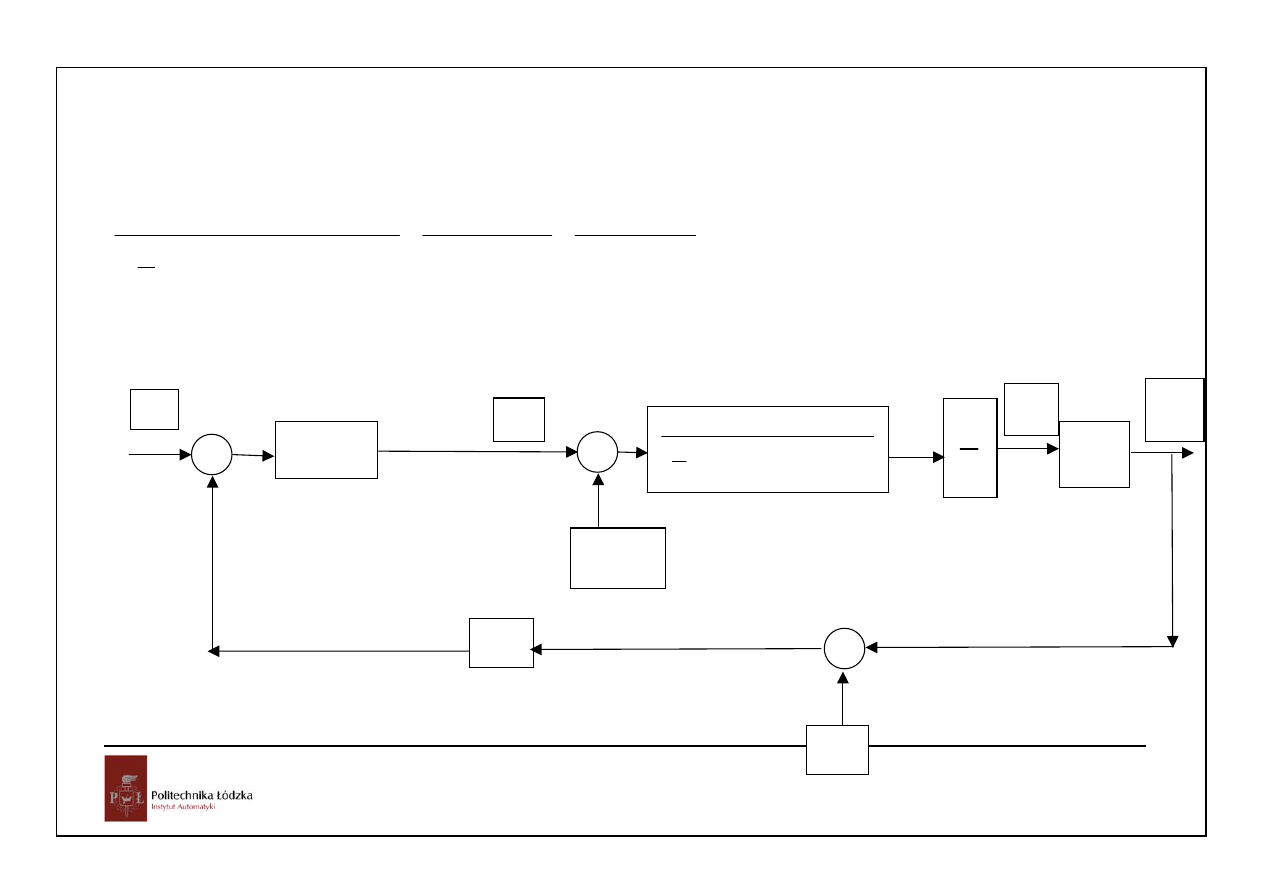
Układy czasu ciągłego
C(s)
P(s)
D(s)
R(s)
Y(s)
E(s)
U(s)
regulator
obiekt
N(s)
F(s)
v(s)
n(s)
F(s)=1 – sprz. od uchybu
3
Automatyka i sterowanie 10 Przykłady
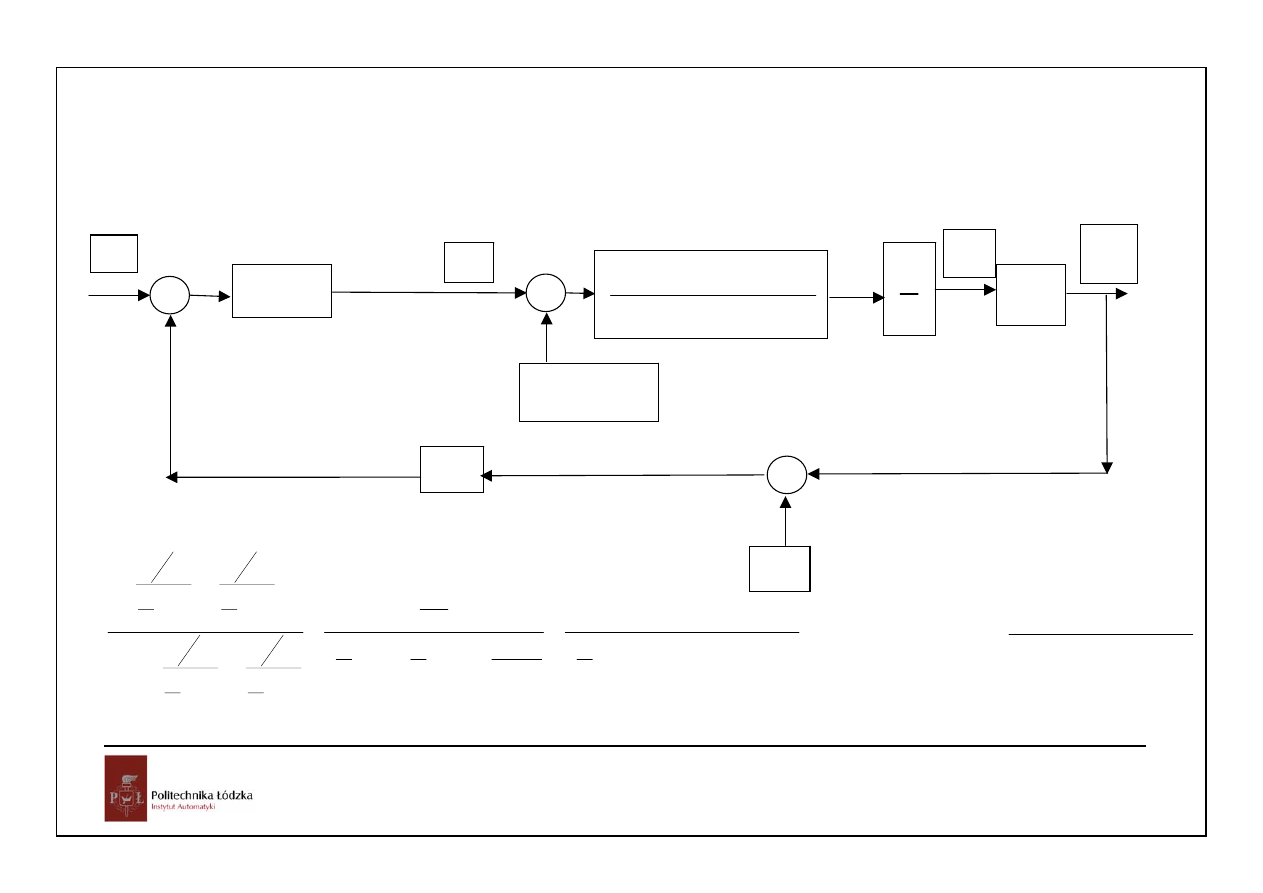
Układy czasu ciągłego
6 transmitancji:
YN
T
,
YD
T
,
YR
T
;
N
PC
D
PC
P
R
PC
FPC
Y
+
+
+
+
+
=
1
1
1
1
,
N
PC
PC
D
PC
P
R
PC
FPC
n
+
−
+
+
+
+
=
1
1
1
,
N
PC
C
D
PC
R
PC
FC
v
+
−
+
+
+
+
=
1
1
1
1
,
UN
T
,
UD
T
,
UR
T
:
N
PC
C
D
PC
PC
R
PC
FC
U
+
−
+
+
−
+
+
=
1
1
1
,
N
PC
D
PC
P
R
PC
F
E
+
−
+
+
−
+
+
=
1
1
1
1
Na sygnał zadający
Na szum pomiarowy
Na zakłócenie
P(s)C(s) Transmitancja układu otwartego
1
1
S( s )
P( s )C( s )
=
+
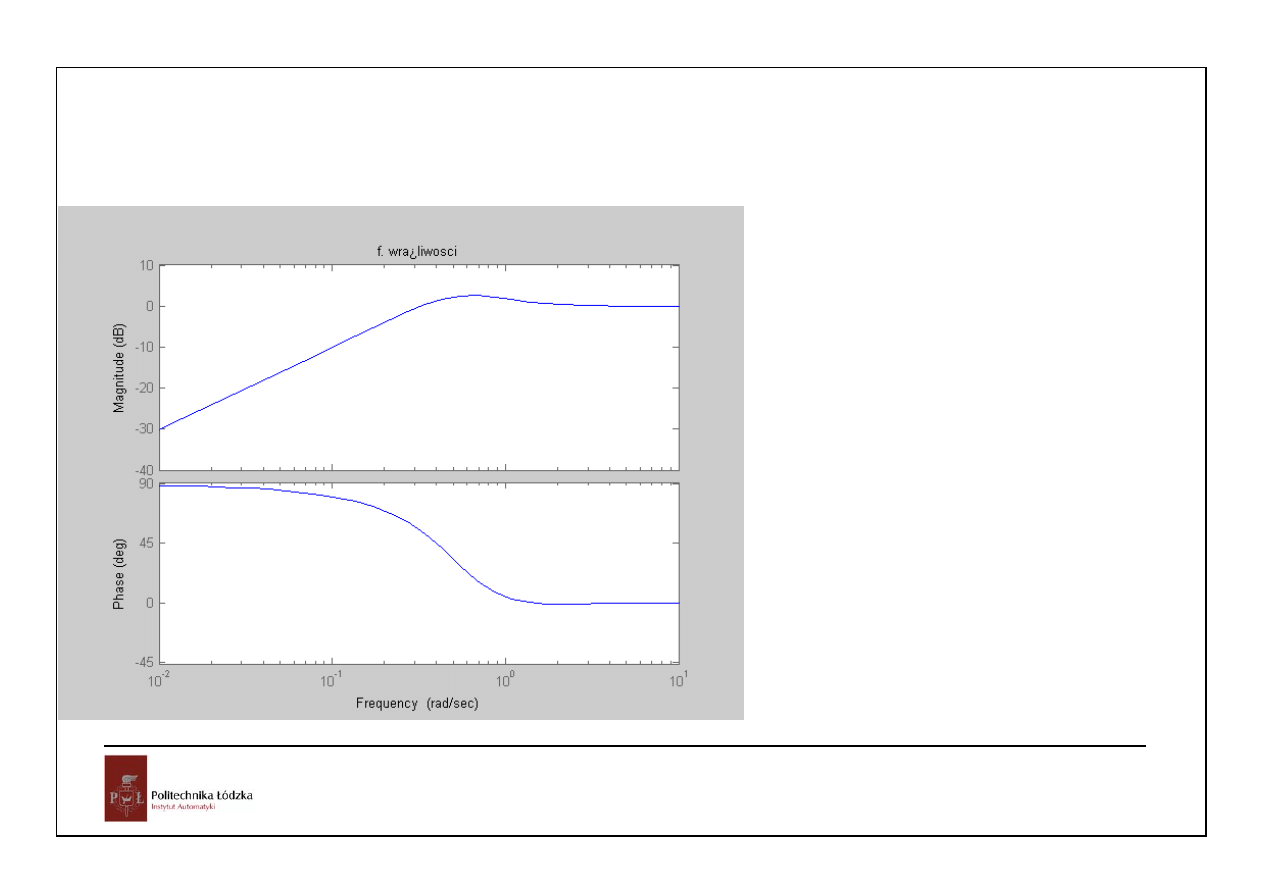
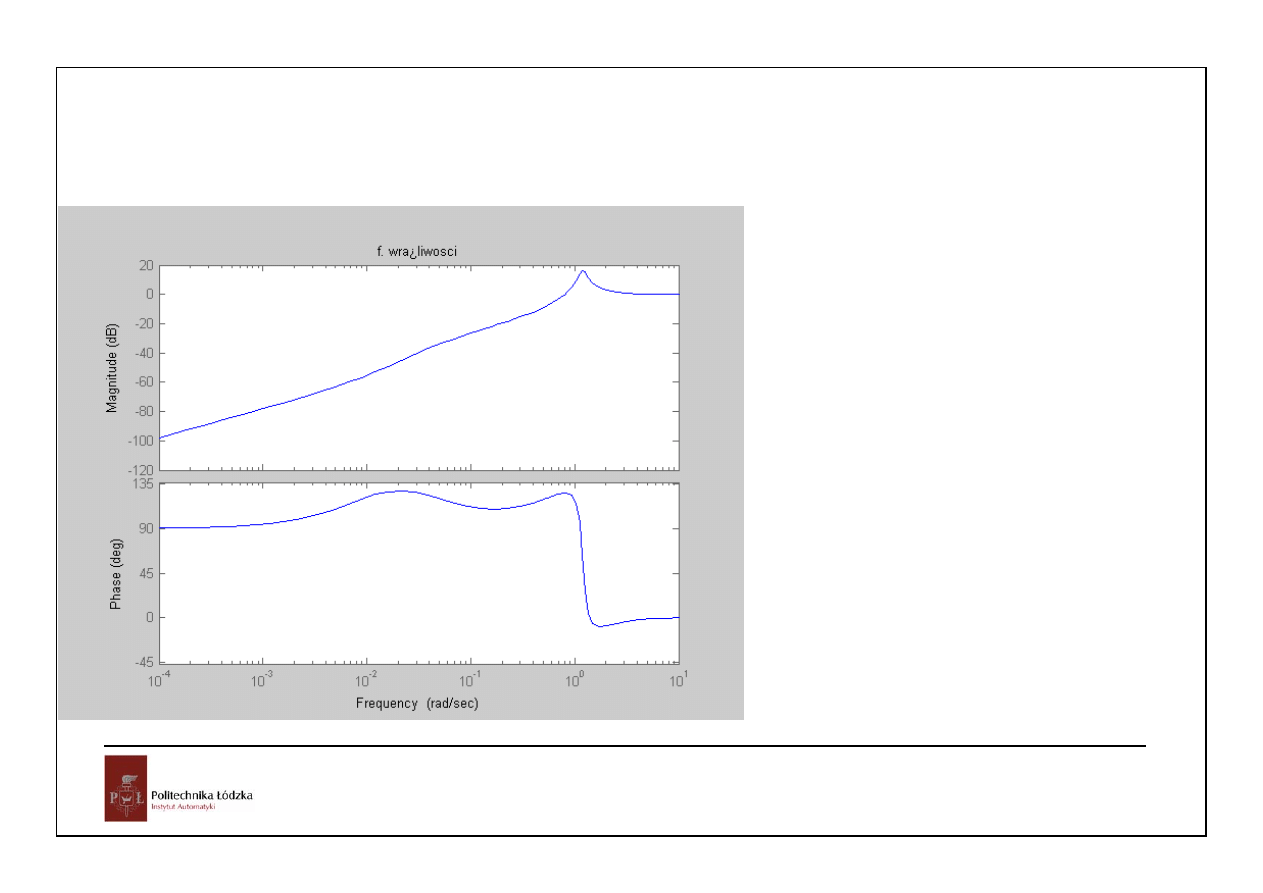
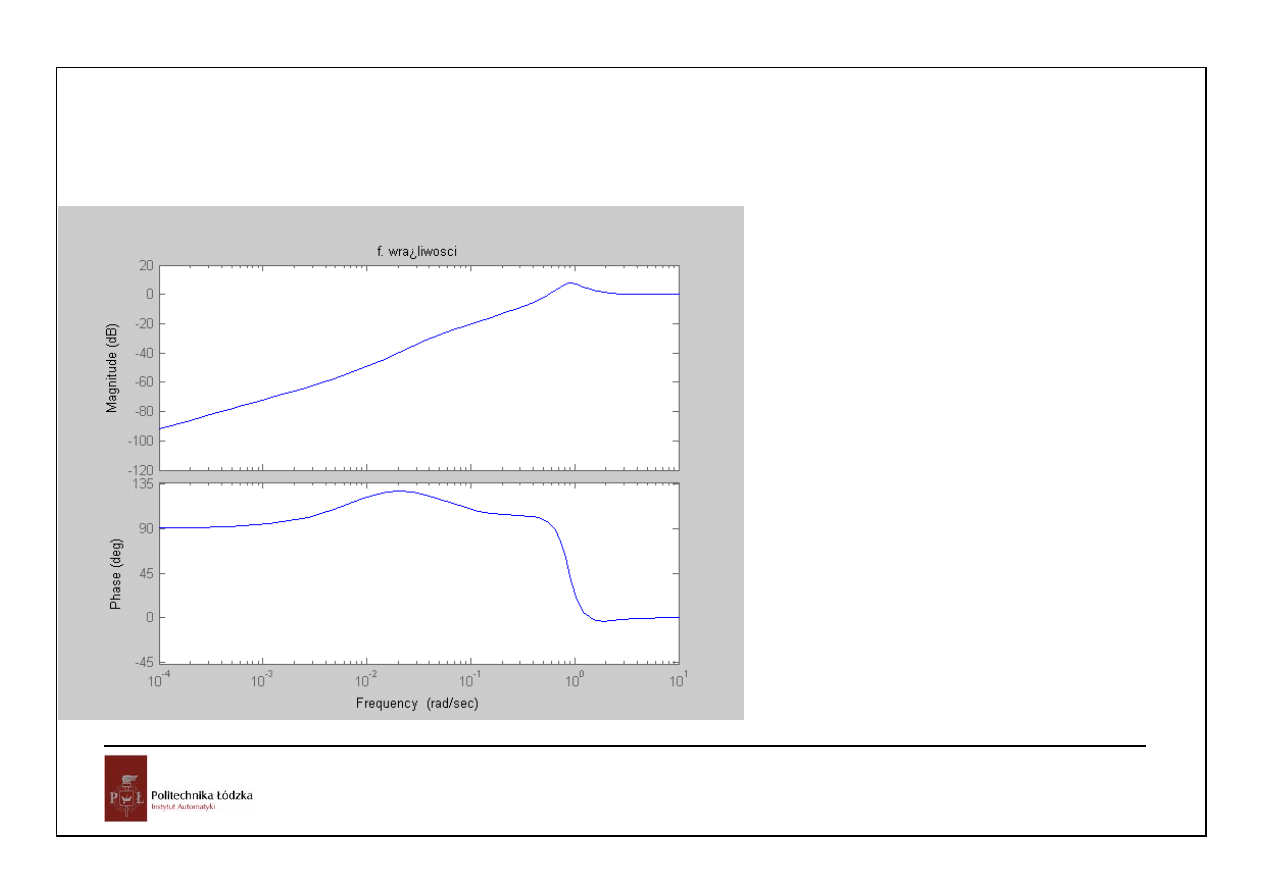
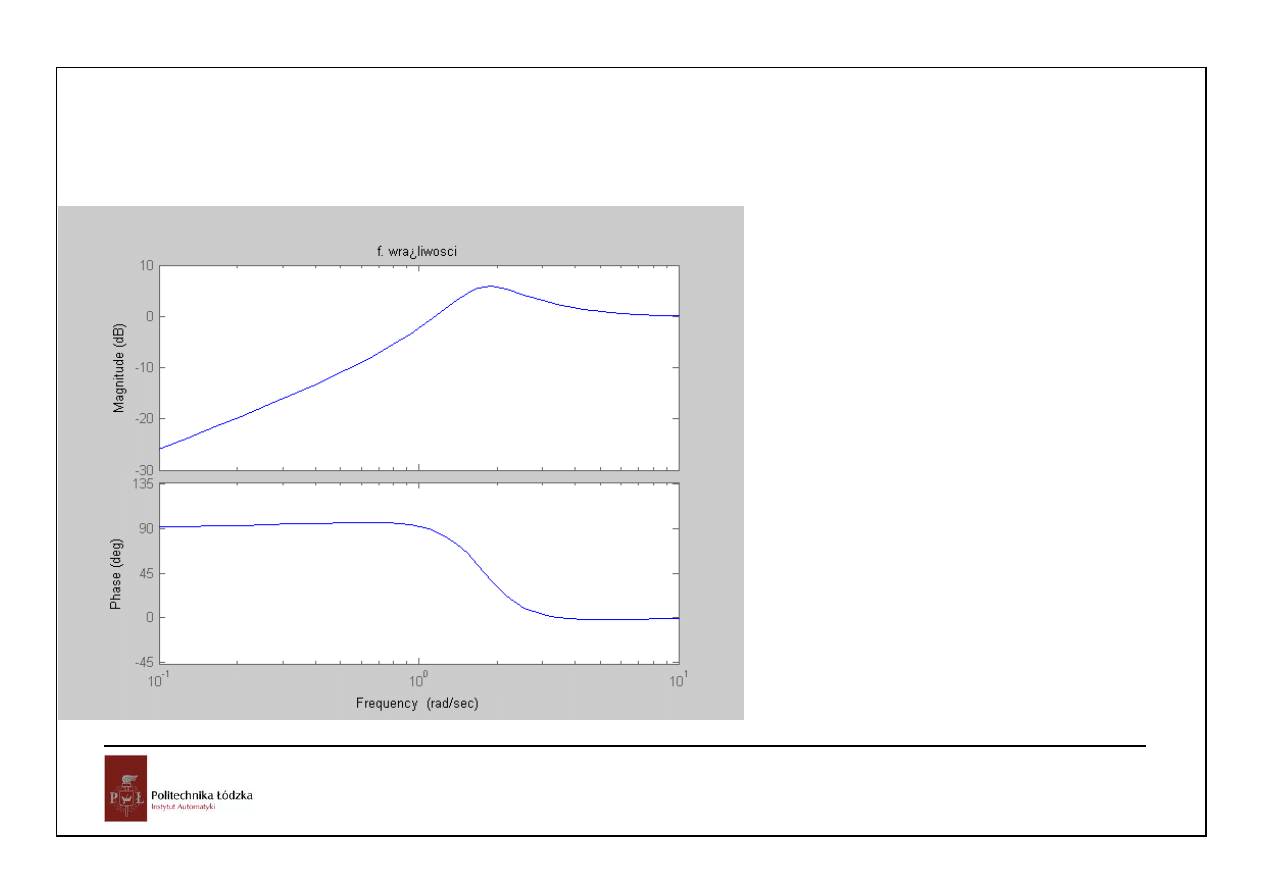
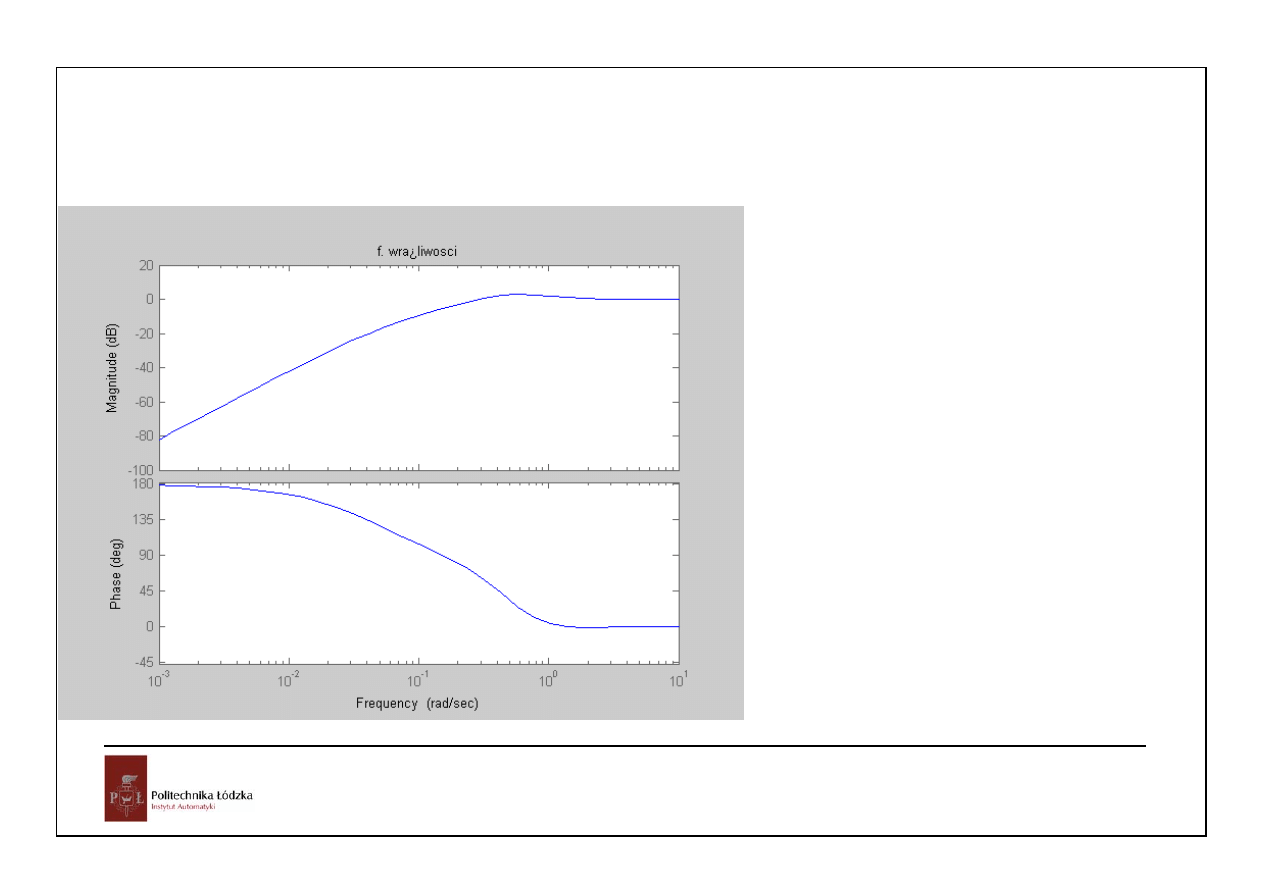
funkcja wrażliwości
1
YR
S( s ) T ( s )
+
=
4
Automatyka i sterowanie 10 Przykłady
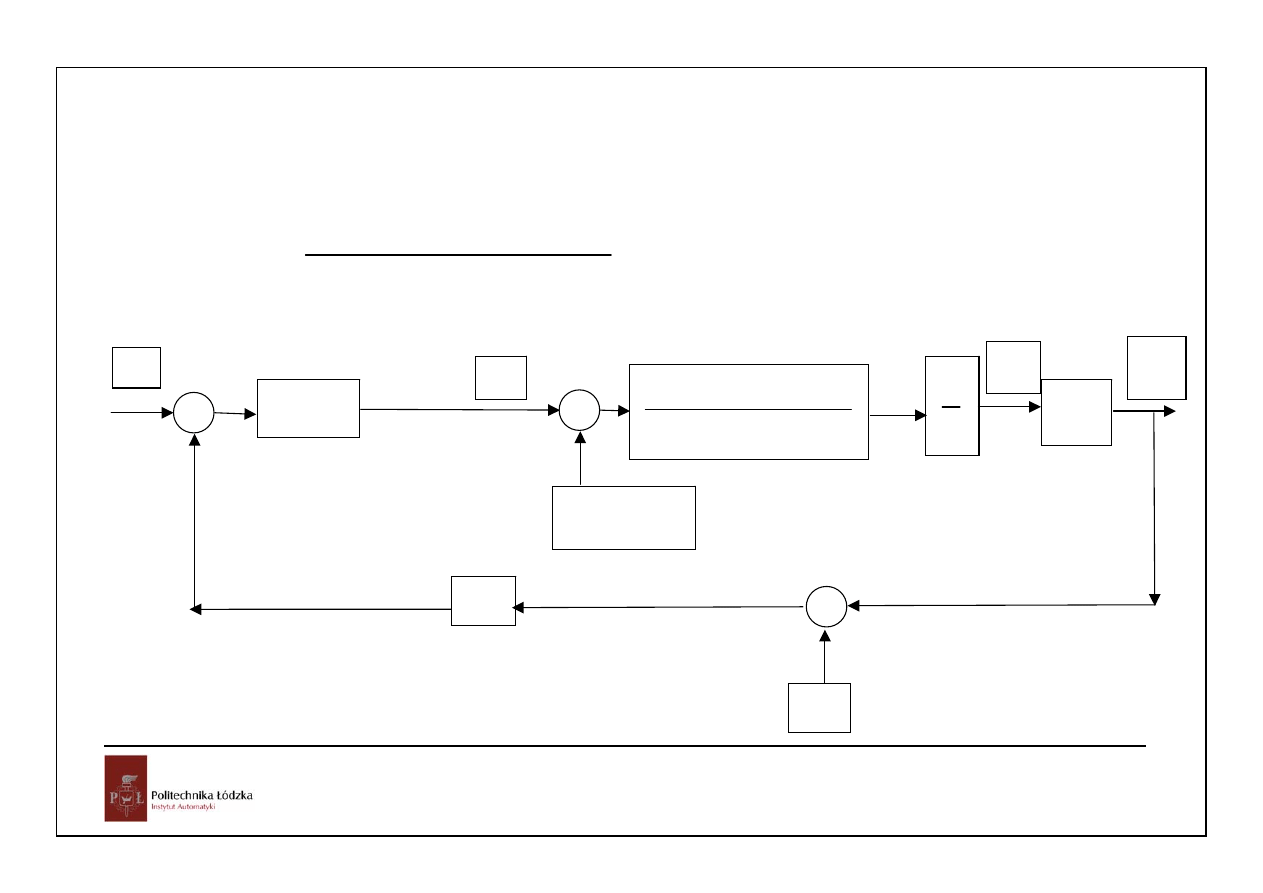
Układy czasu ciągłego
Silnik serwo
0
d
dt
d
J
( t ) B ( t ) M ( t )
dt
θ ω
ω τ
ω
=
=
−
−
( t ) K i( t ) K i( t )
τ
τ
ϕ
=
=
1
m
m
m
di
u( t ) L
Ri( t ) e ( t )
dt
e ( t ) K
( t ) K
( t )
ϕω
ω
=
+
+
=
=
silnik
Układ pomiaru i
sterowania
Wzmacniacz
mocy
θ
a
(t)
r(t)
e(t)
θ (t)
u(t)
r(t)
θ
a
(t)
zakłócenie
Uwzględnia maszynę roboczą
5
Automatyka i sterowanie 10 Przykłady
Układy czasu ciągłego
0
1
( s )
( s )
s
Js ( s ) K i( s ) B ( s ) M ( s )
τ
θ
ω
ω
ω
=
=
−
−
m
u( s ) Lsi( s ) Ri( s ) K
( s )
ω
=
+
+
(
)
(
)
1
1
1
m
m
R
i( s )
u( s ) K
( s )
u( s ) K
( s )
L
Ls R
s
R
ω
ω
=
−
=
−
+
+
(
)
(
)
0
0
1
1
1
B
( s )
K i( s ) M ( s )
K i( s ) M ( s )
J
Js B
s
B
τ
τ
ω
=
−
=
−
+
+
6
Automatyka i sterowanie 10 Przykłady
Układy czasu ciągłego
0
1
u
m
m
K
K
RB
L
T
J
K K
JRs RB K K
s
B
RB
τ
τ
ω
τ
τ
≈ ⇒
=
=
+
+
⎛
⎞
+ +
⎜
⎟
⎝
⎠
1
1
R
L
s
R
+
K
τ
1
1
B
J
s
B
+
0
M
−
m
K
−
1
s
θ
u
ω
7
Automatyka i sterowanie 10 Przykłady
Układy czasu ciągłego
(
)
1
1
1
1
1
1
1
1
1
1
1
1
u
m
m
m
R
B
K
L
J
K
s
s
K
R
B
RB
T
L
J
K K
L
s
s
s
JRs RB
K K
R
B
K
K
R
B
RB
R
L
J
s
s
R
B
τ
τ
τ
ω
τ
τ
τ
+
+
=
=
=
⎛
⎞⎛
⎞
⎛
⎞
+
+ +
+
+
+
⎜
⎟⎜
⎟
⎜
⎟
+
⎝
⎠⎝
⎠
⎝
⎠
+
+
(
)
0
u
m
K
L ~
T
JRs RB
K K
τ
ω
τ
≈
⇒
=
+
+
C( s )
m
K
JRs RB K K
τ
τ
+
+
0
M
K M
−
1
−
1
s
θ
u
p
K
a
θ
r
N
8
Automatyka i sterowanie 10 Przykłady
Układy czasu ciągłego
(
)
0
0
a
u
m
K
L
T
JRs RB K K s
θ
τ
≈ ⇒
=
+
+
C( s )
m
K
JRs RB K K
τ
τ
+
+
0
M
K M
−
1
−
1
s
θ
u
p
K
a
θ
r
N
9
Automatyka i sterowanie 10 Przykłady
Układy czasu ciągłego
(
)
0
2
4
4
1
2
3
2
1
a
u
m
K
T
s( s
)( s
)
s( s
s
)
L
s
JRs RB
K K
s
R
θ
τ
=
=
=
+
+
+ +
⎛
⎞
⎛
⎞
+
+
+
⎜
⎟
⎜
⎟
⎝
⎠
⎝
⎠
C( s )
(
)
1
m
K
L
s
JRs RB
K K
R
τ
τ
⎛
⎞
+
+
+
⎜
⎟
⎝
⎠
z
M
−
1
−
1
s
θ
u
p
K
a
θ
r
N
10
Automatyka i sterowanie 10 Przykłady
Układy czasu ciągłego
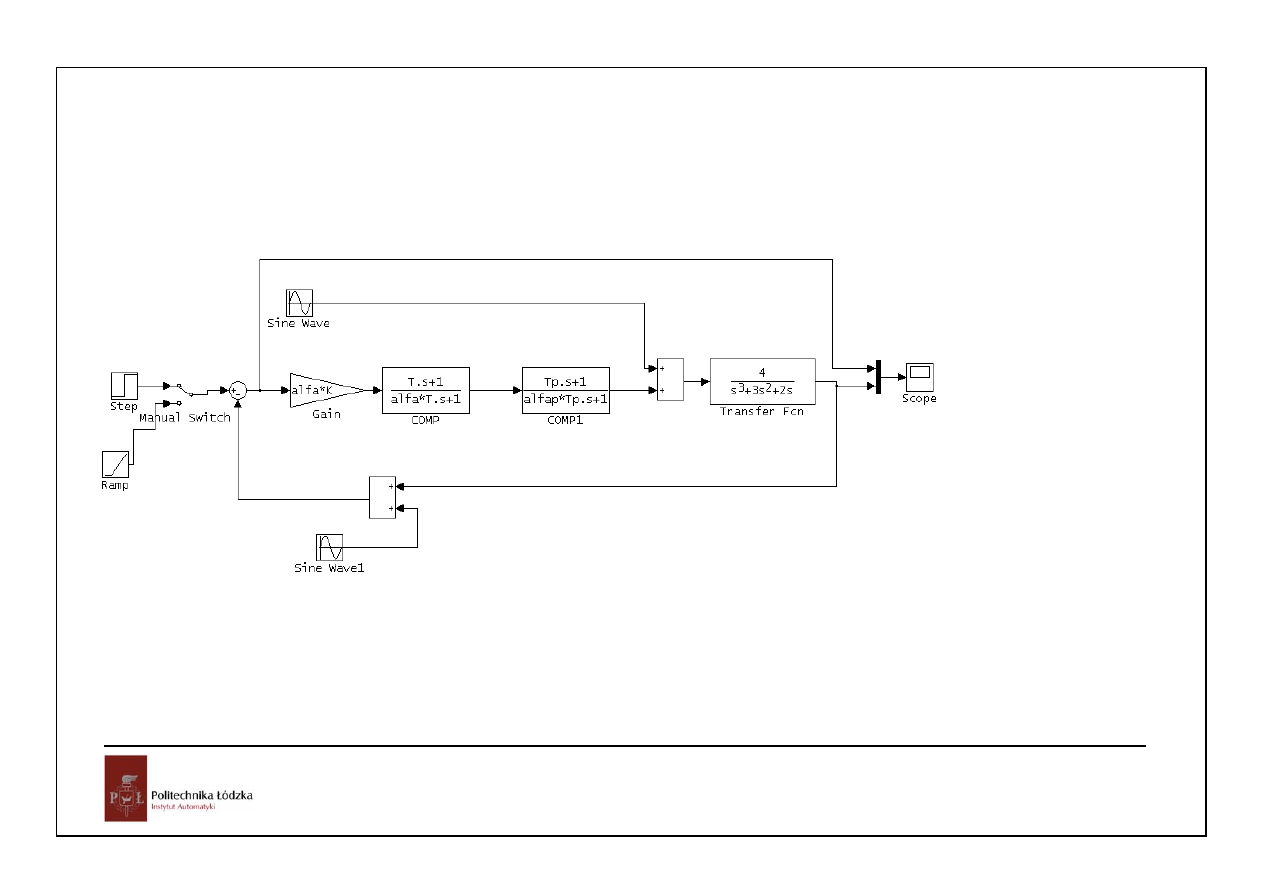
C(s)=1:
2
2
2
4
4
3
2
4
3
2
4
1
3
2
a
r
s( s
s
)
T
s( s
s
)
s( s
s
)
θ
+
+
=
=
+
+
+
+
+
+
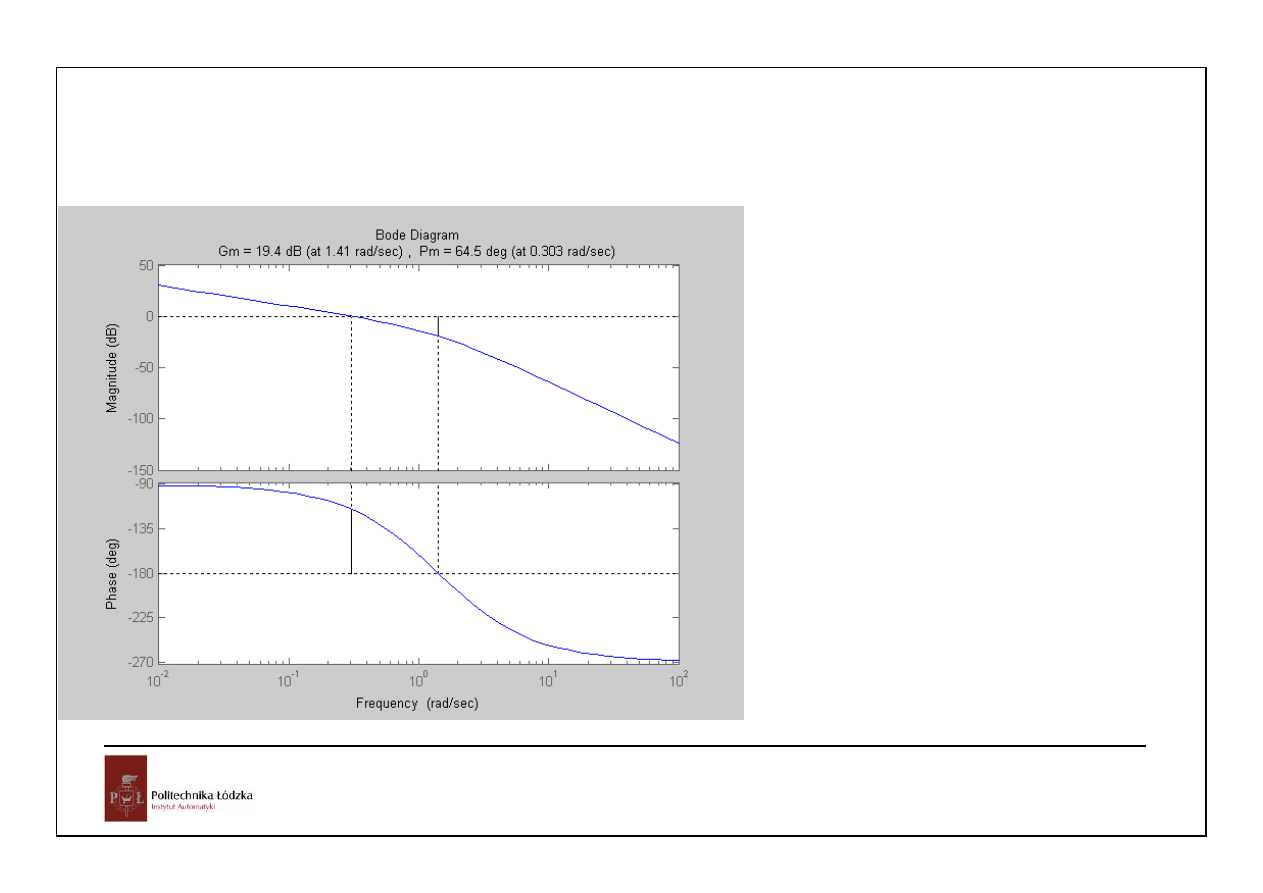
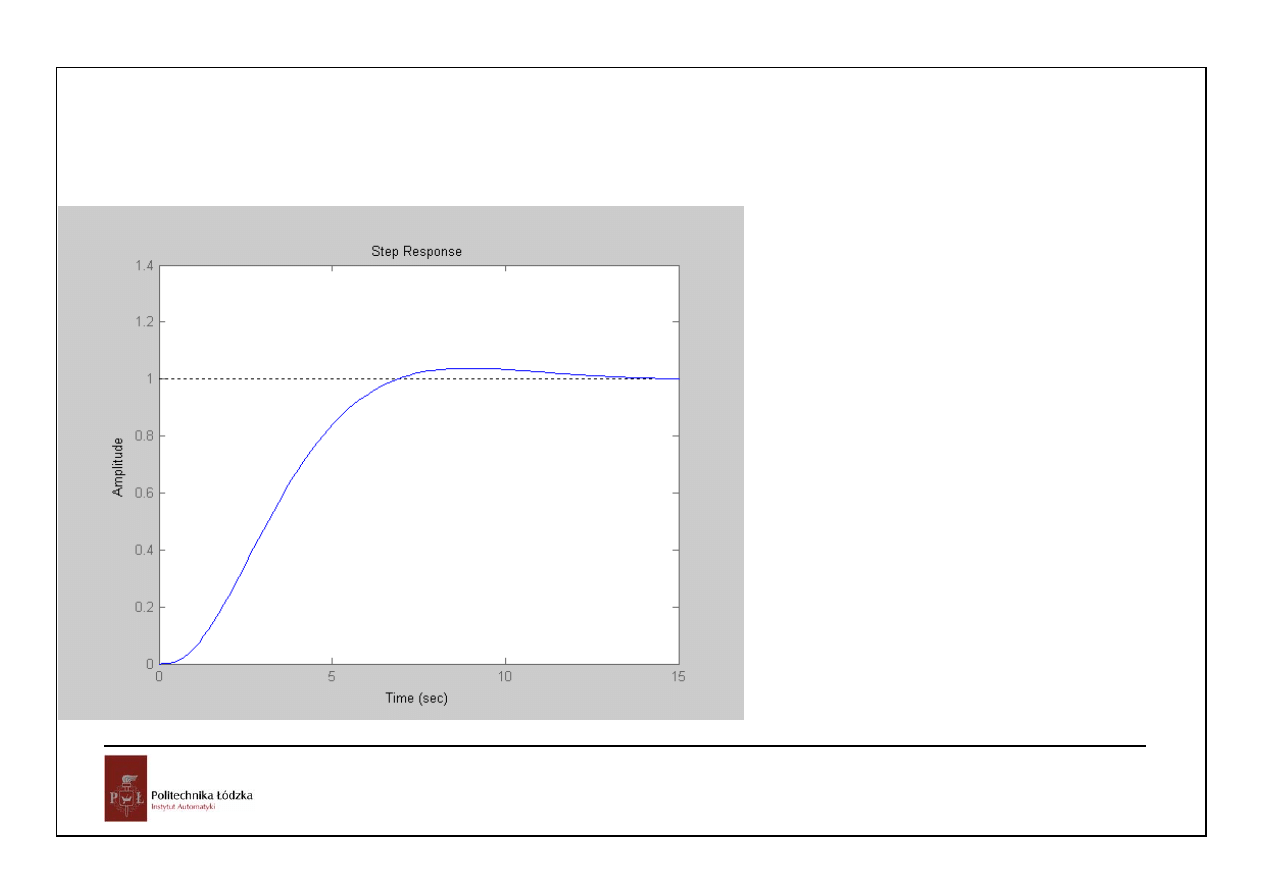
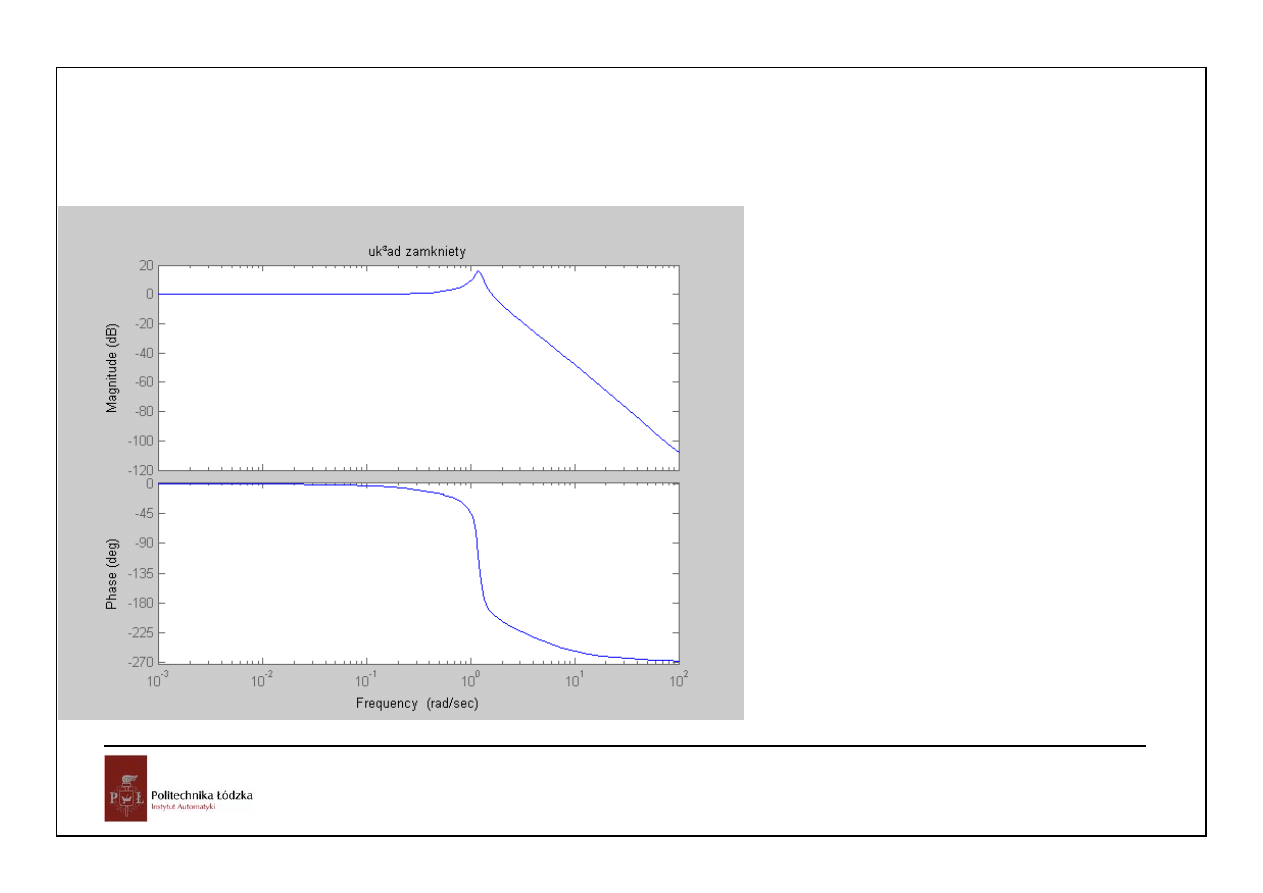
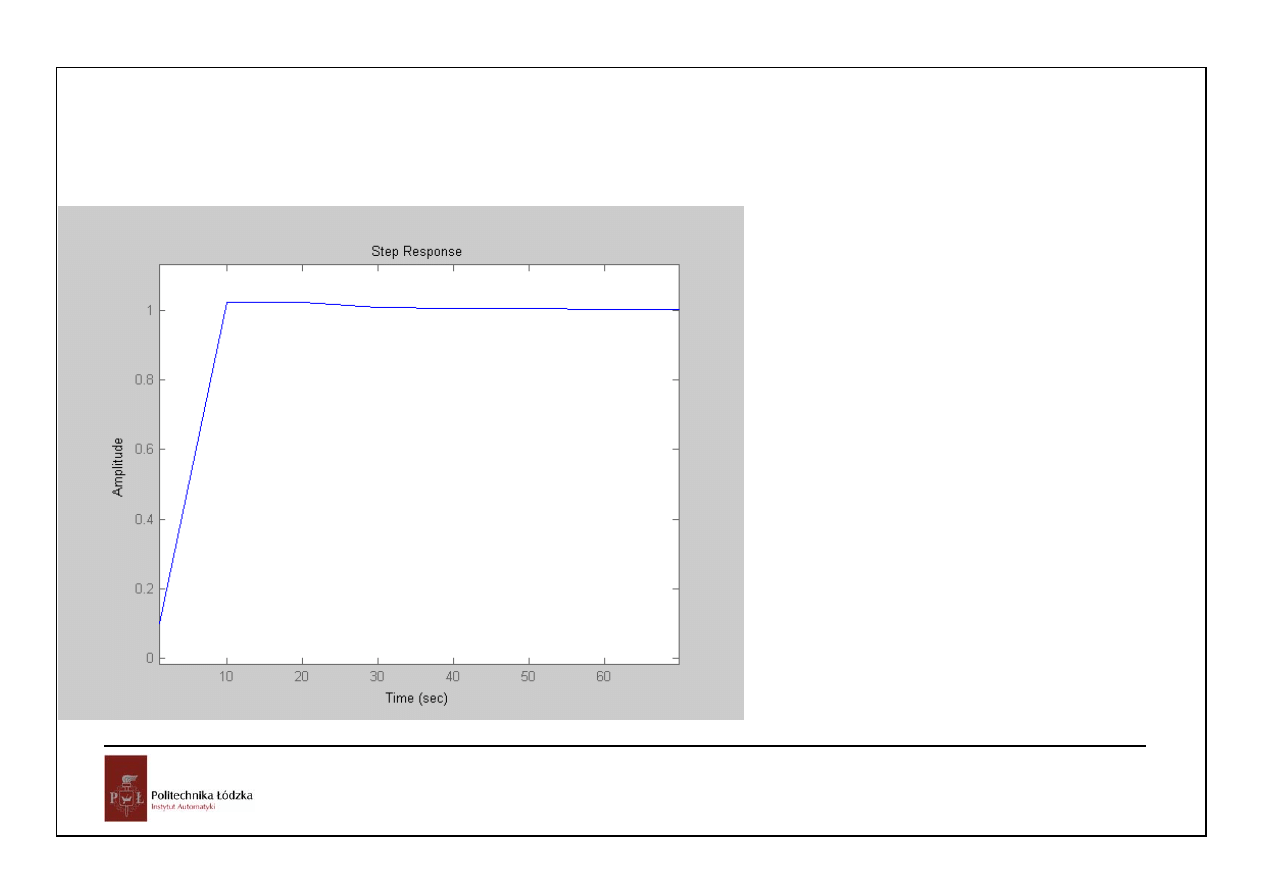
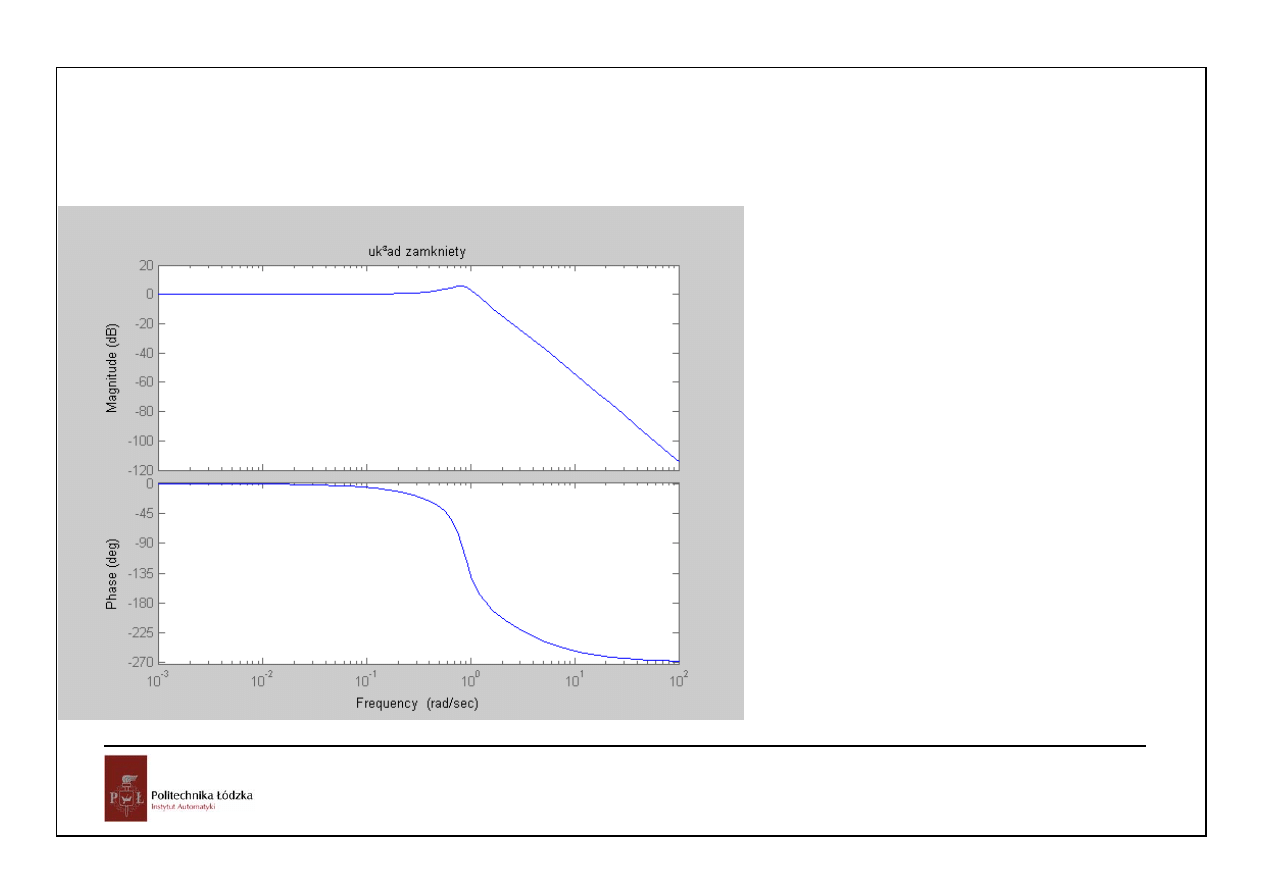
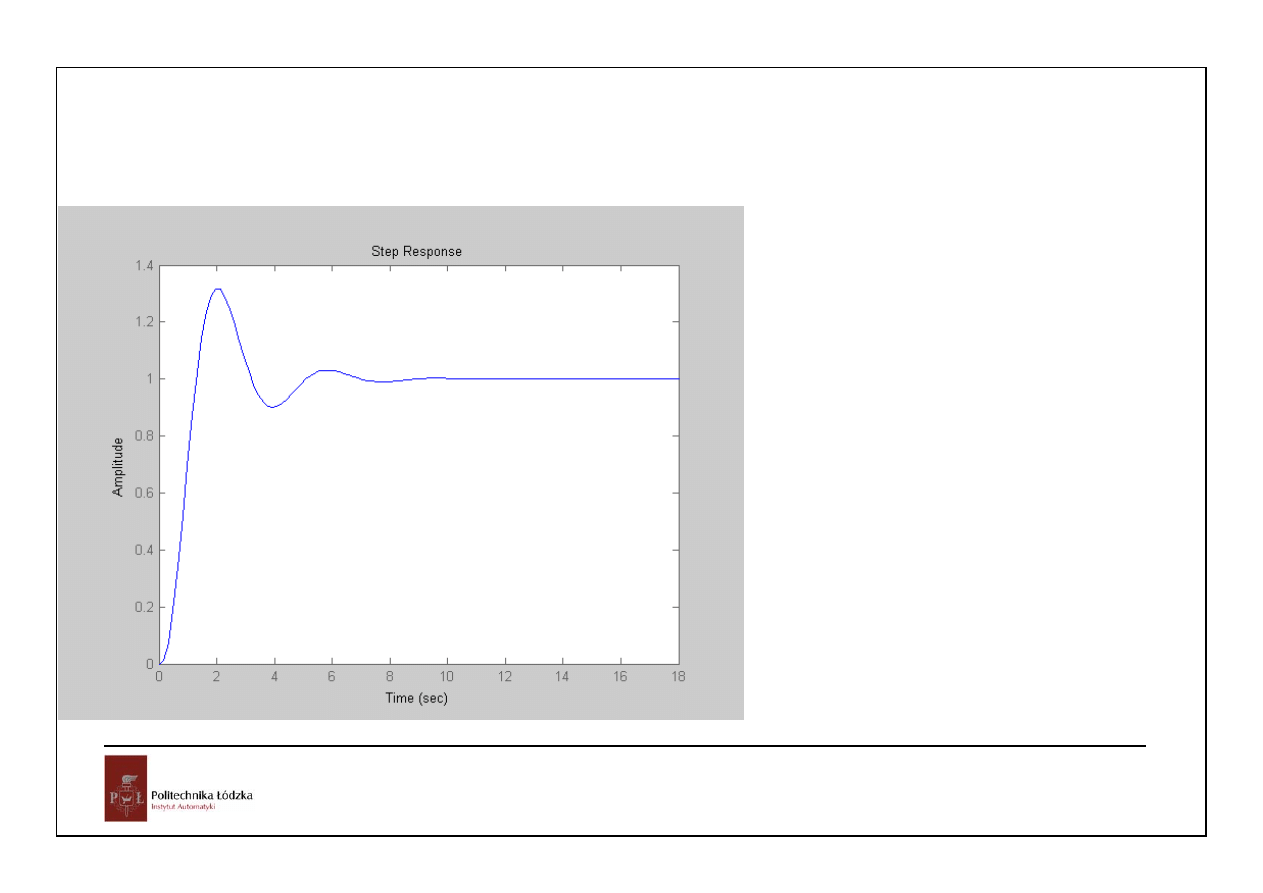
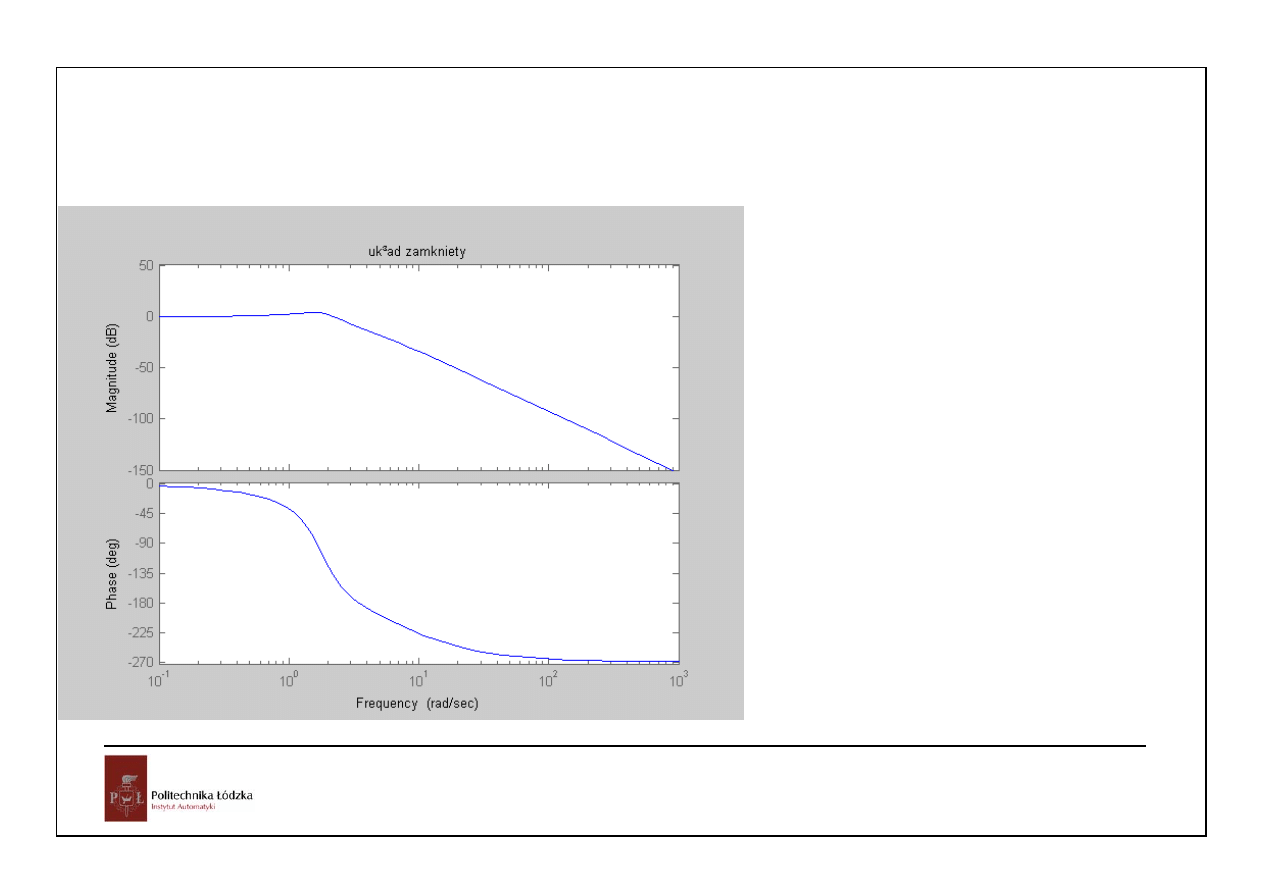
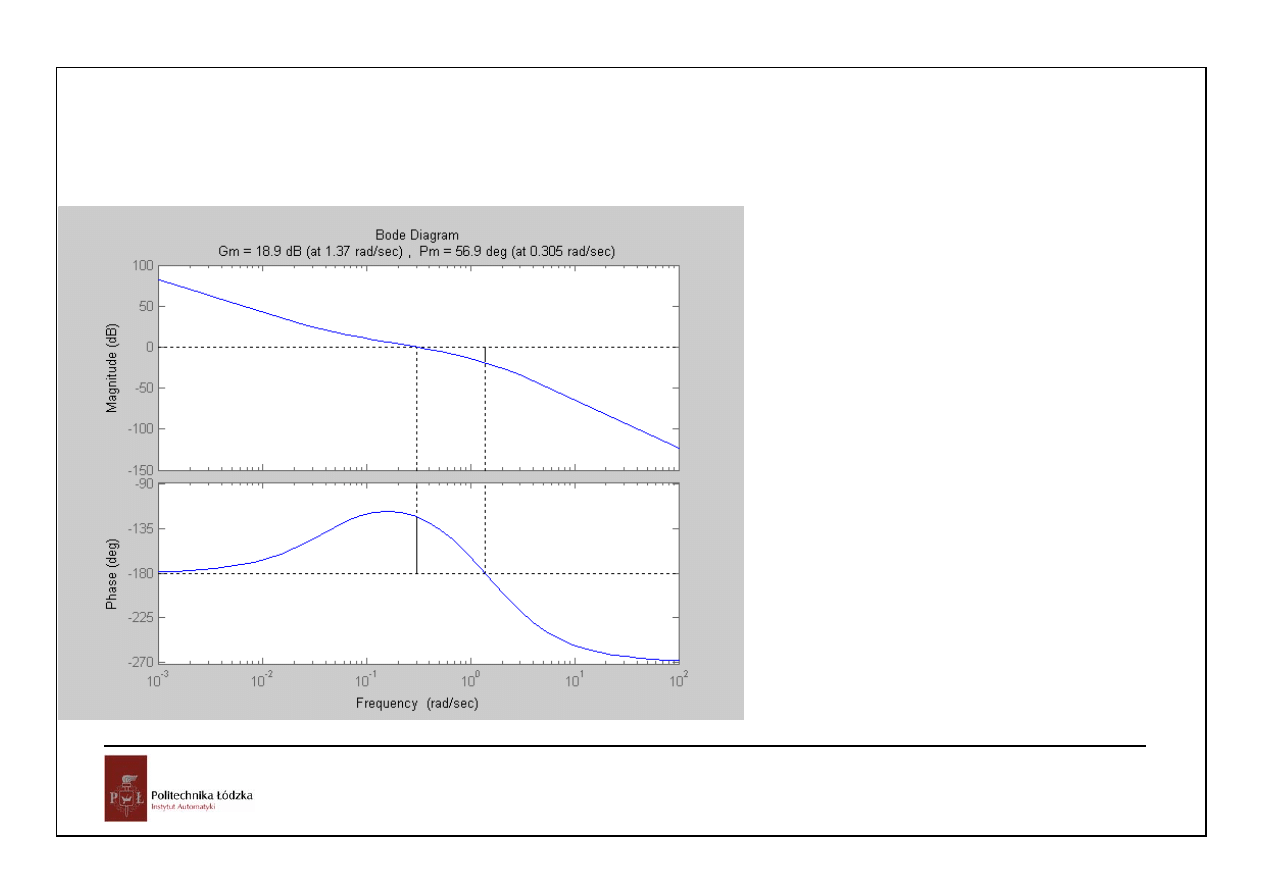
po zamknięciu stabilny,
małe zapasy stabilności,
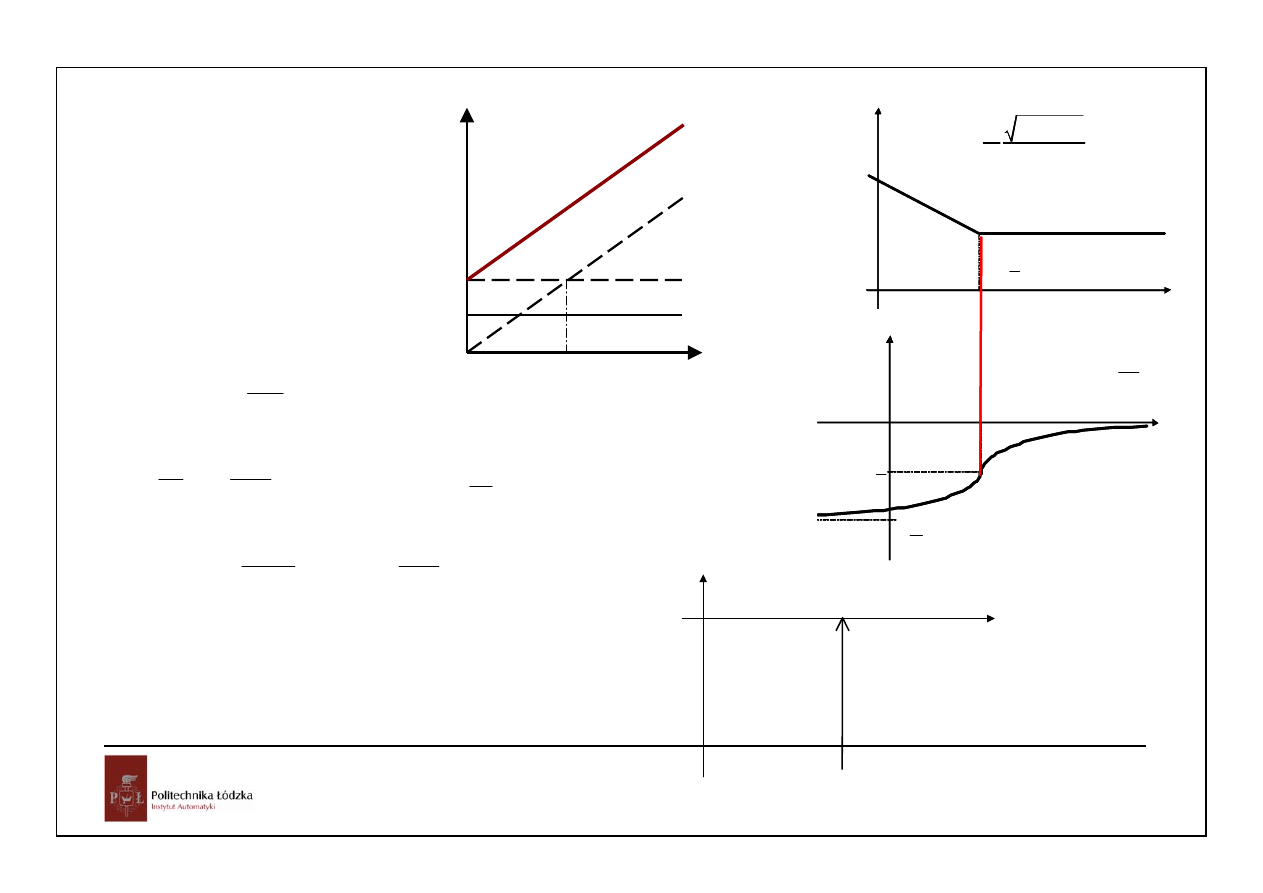
przy wymuszeniu jednostkowym uchyb
ustalony zerowy,
przy wymuszeniu narastającym liniowo
uchyb ustalony=0.5
bieguny układu zamkniętego:
3
2
3
2
4 0
s
s
s
+
+
+ =
:
-2.7963
-0.1018 + 1.1917j
-0.1018 - 1.1917j
0
-45
-90
11
Automatyka i sterowanie 10 Przykłady
Układy czasu ciągłego
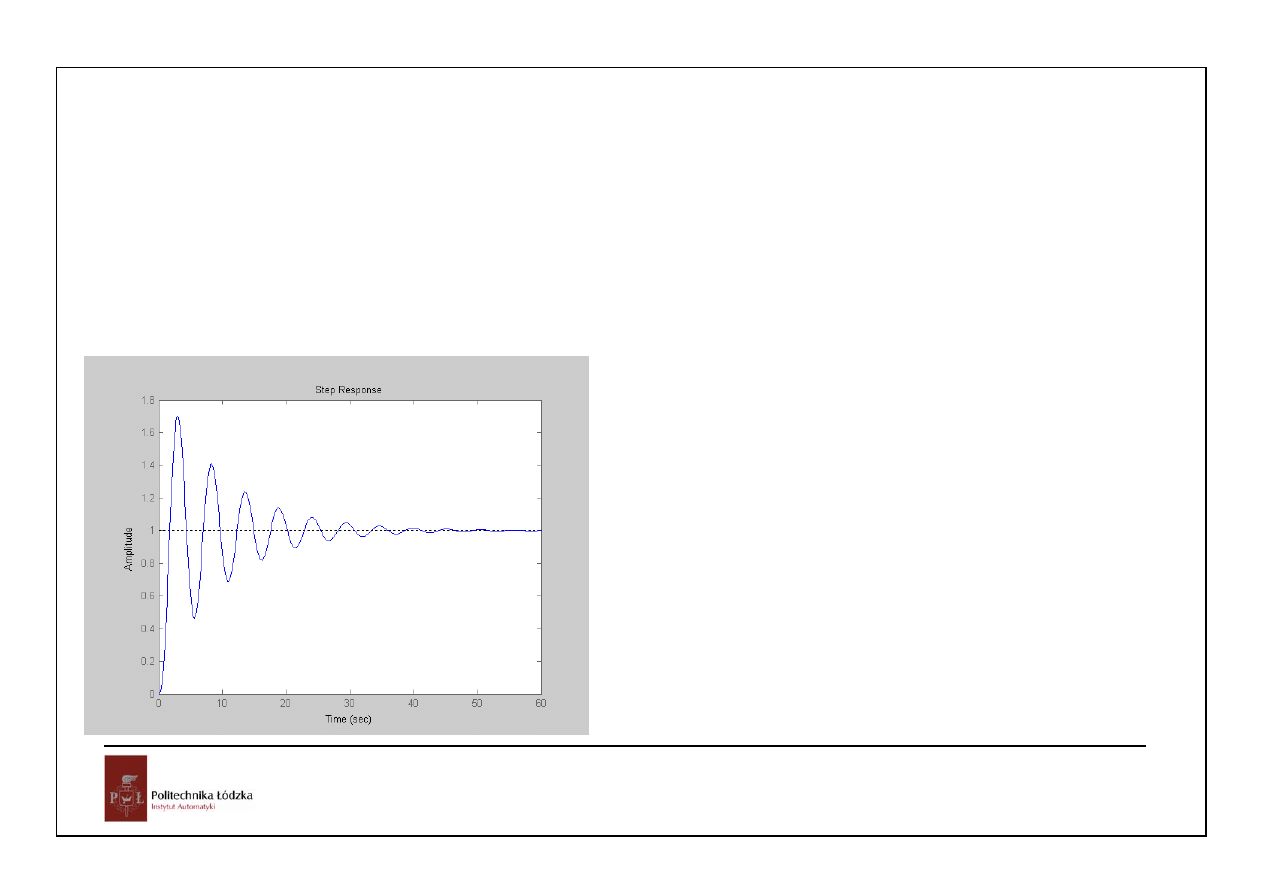
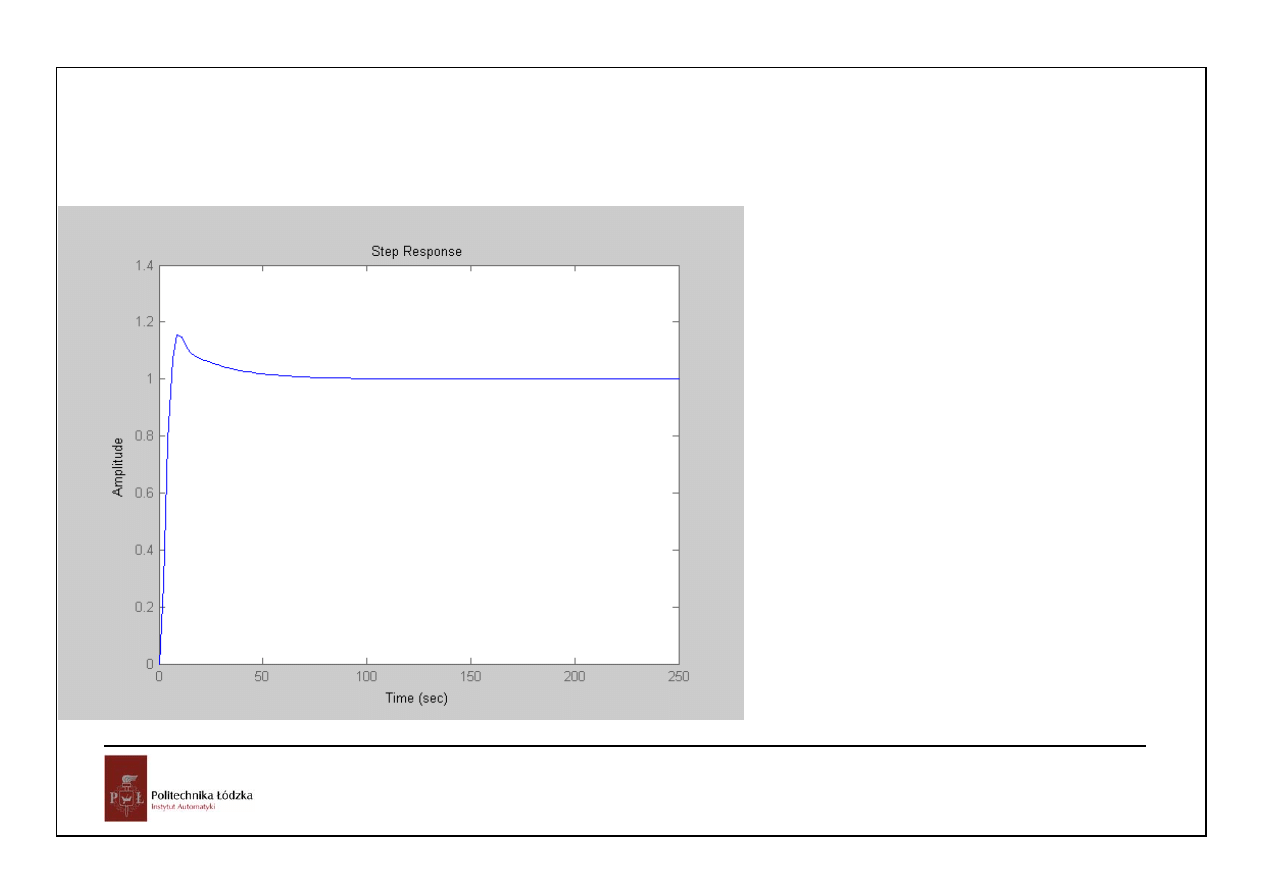
Taką transmitancję można przedstawić jako równoległe połączenie układu inercyjnego o biegunie
-2.7963 i oscylacyjnego o biegunach -0.1018 + 1.1917j i -0.1018 - 1.1917j. W odpowiedzi możemy
spodziewać się składowej aperiodycznej zanikającej jak exp(-2.7963t), czyli ze stałą czasową
1/2.7963=0.3576 i składowej oscylacyjnej o obwiedni zanikającej jak exp(-0.1018t), czyli ze stałą
czasową 1/0.1018=9.82, wypełnionej oscylacjami o okresie 2π/1.1917=5.27.
Dla tego układu można wyznaczyć opis w przestrzeni stanów:
a
równanie sta
d
x( t ) Ax( t ) Br( t )
dt
( t ) Cx( t ) Dr
nu
równanie wyjśc a
( t )
i
θ
=
+
=
+
np.
[
]
0
1
0
0
0
0
1
0
4 0 0
0
4
2 3
1
A
B
C
D
⎡
⎤
⎡ ⎤
⎢
⎥
⎢ ⎥
=
=
=
=
⎢
⎥
⎢ ⎥
⎢
⎥
⎢ ⎥
−
−
⎣
⎦
⎣ ⎦
wartości własne macierzy A są takie same jak bieguny transmitancji i
(
)
(
)
(
)
1
a
r
adj sI
A
T ( s ) C sI
A
B D C
B D
det sI
A
θ
−
−
=
−
+ =
+
−
.
12
Automatyka i sterowanie 10 Przykłady
Układy czasu ciągłego
Rozwiązanie równania stanu można otrzymać np. ze wzoru
( )
0
0
1
1
1
0
0
i
i
i
i
t
t
n
n
n
s t
s t
s t
s
T
T
T
i
i
i
i
i
i
i
i
i
x( t )
e v w x
e
v w Bu( )d
e v w x
e
Bu( )d
τ
τ
τ τ
τ τ
−
−
=
=
=
⎡
⎤
=
+
=
+
⎢
⎥
⎣
⎦
∑
∑
∑
∫
∫
13
Automatyka i sterowanie 10 Przykłady
Układy czasu ciągłego
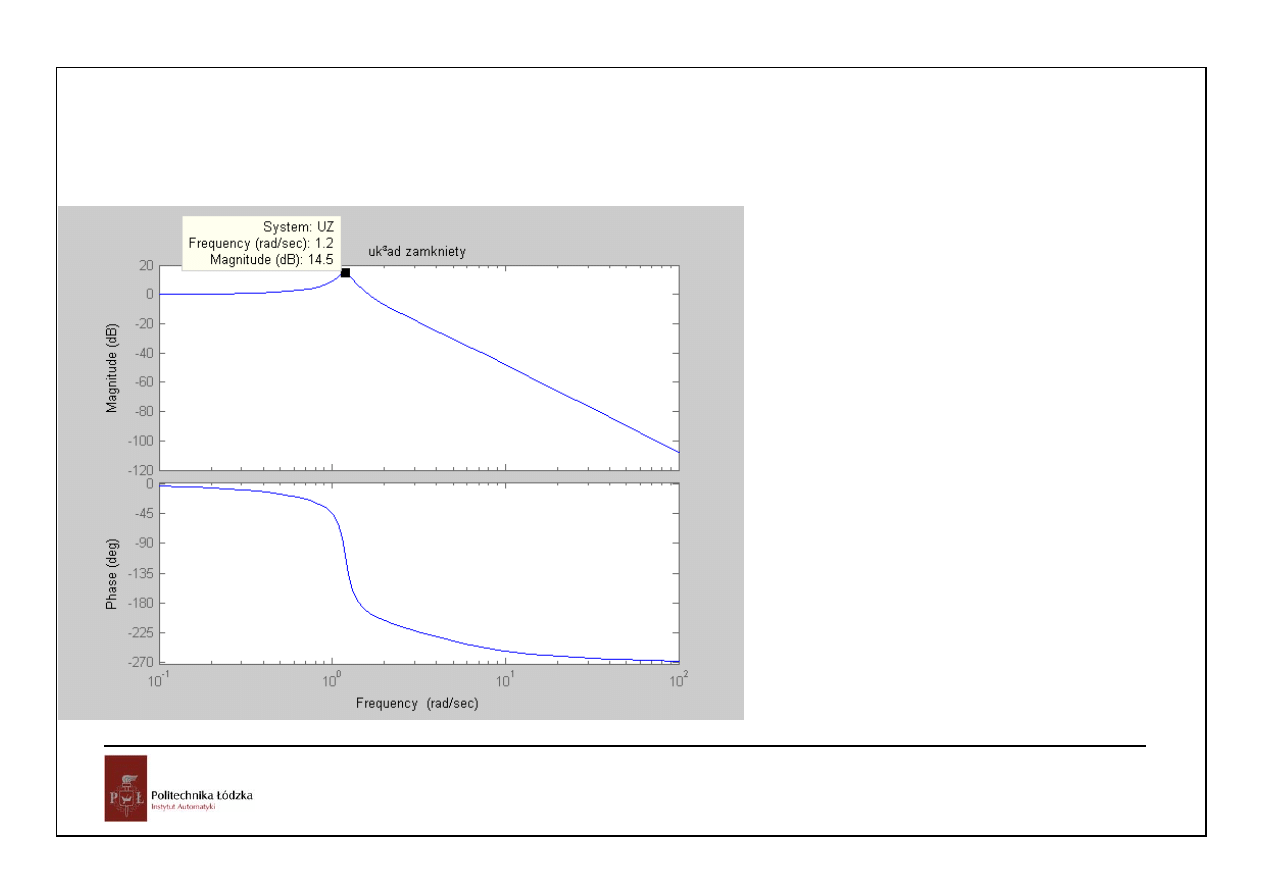
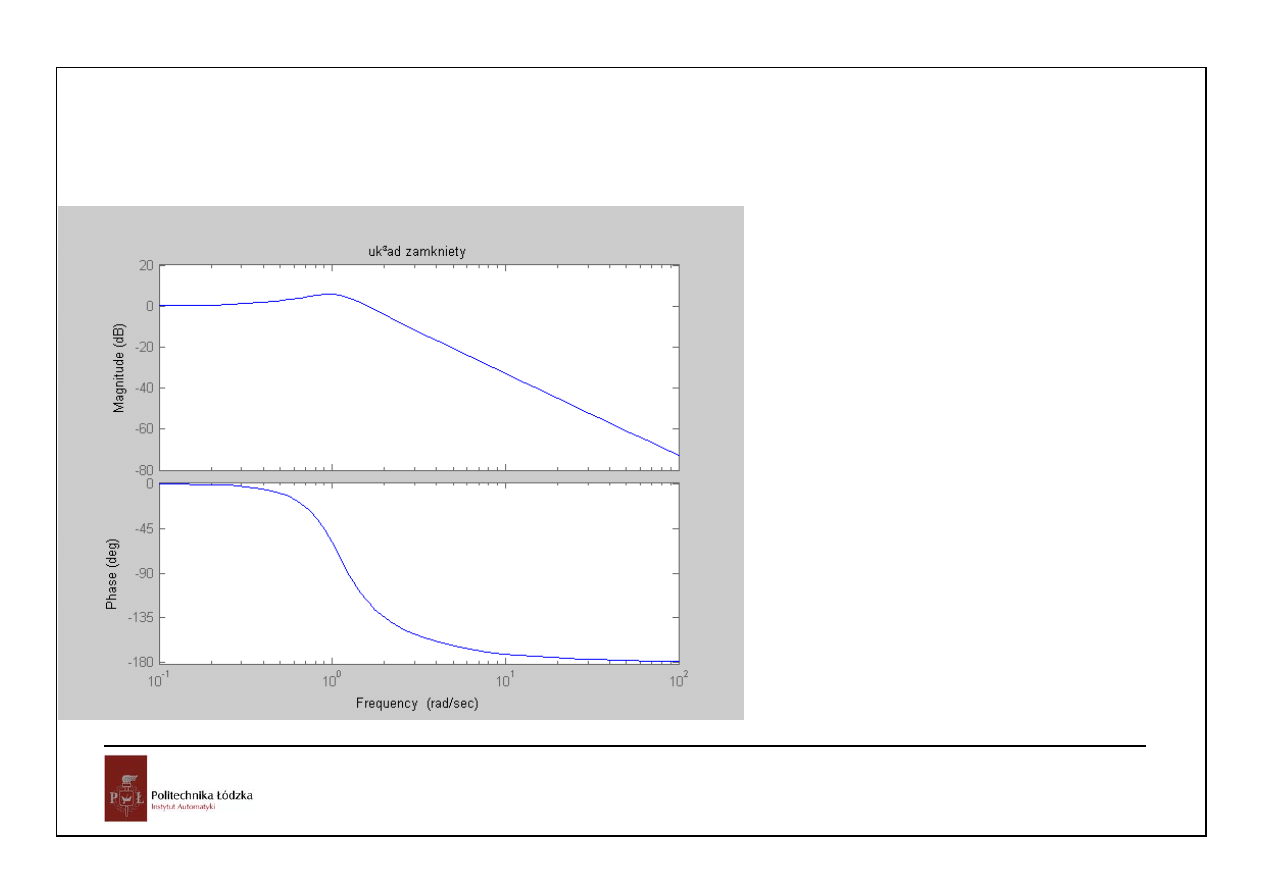
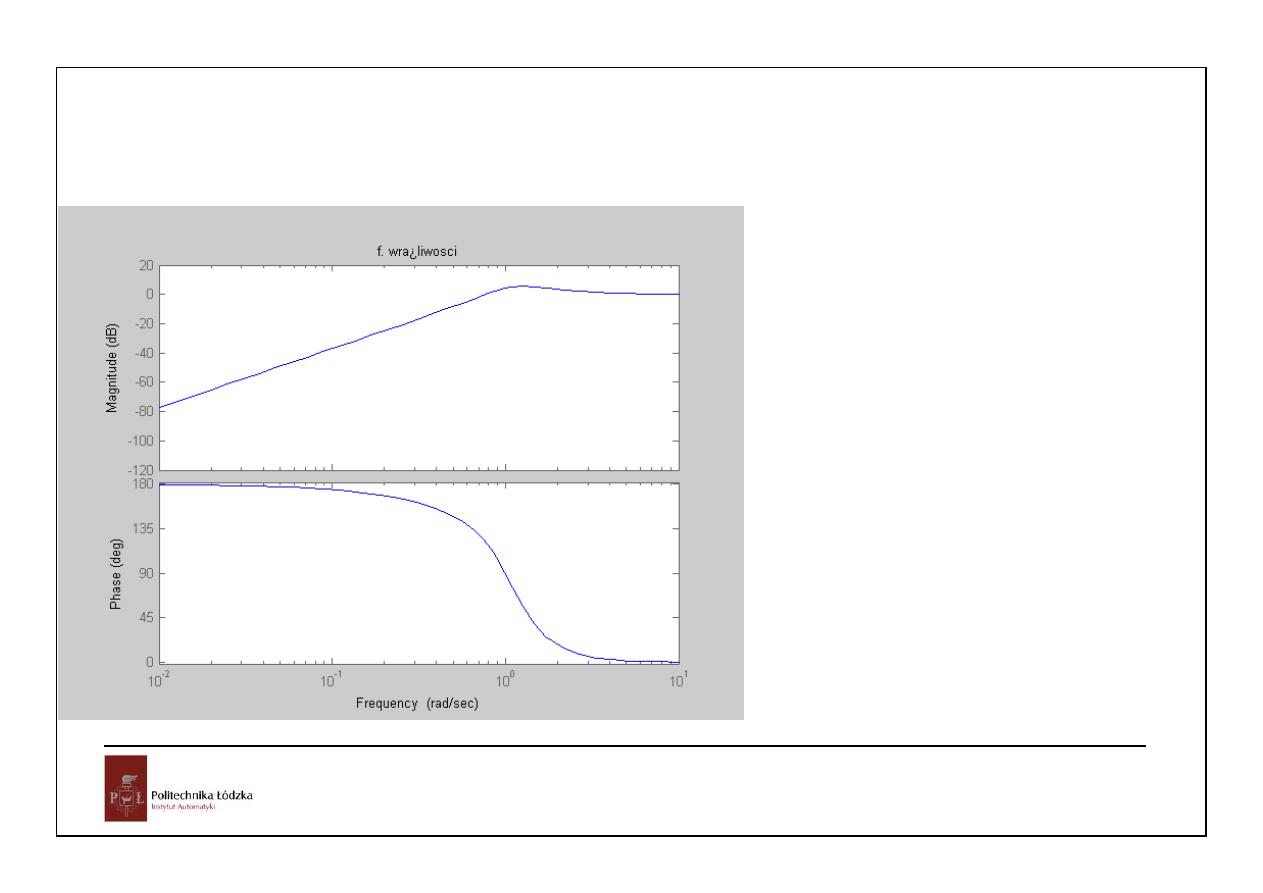
14
Automatyka i sterowanie 10 Przykłady
Układy czasu ciągłego
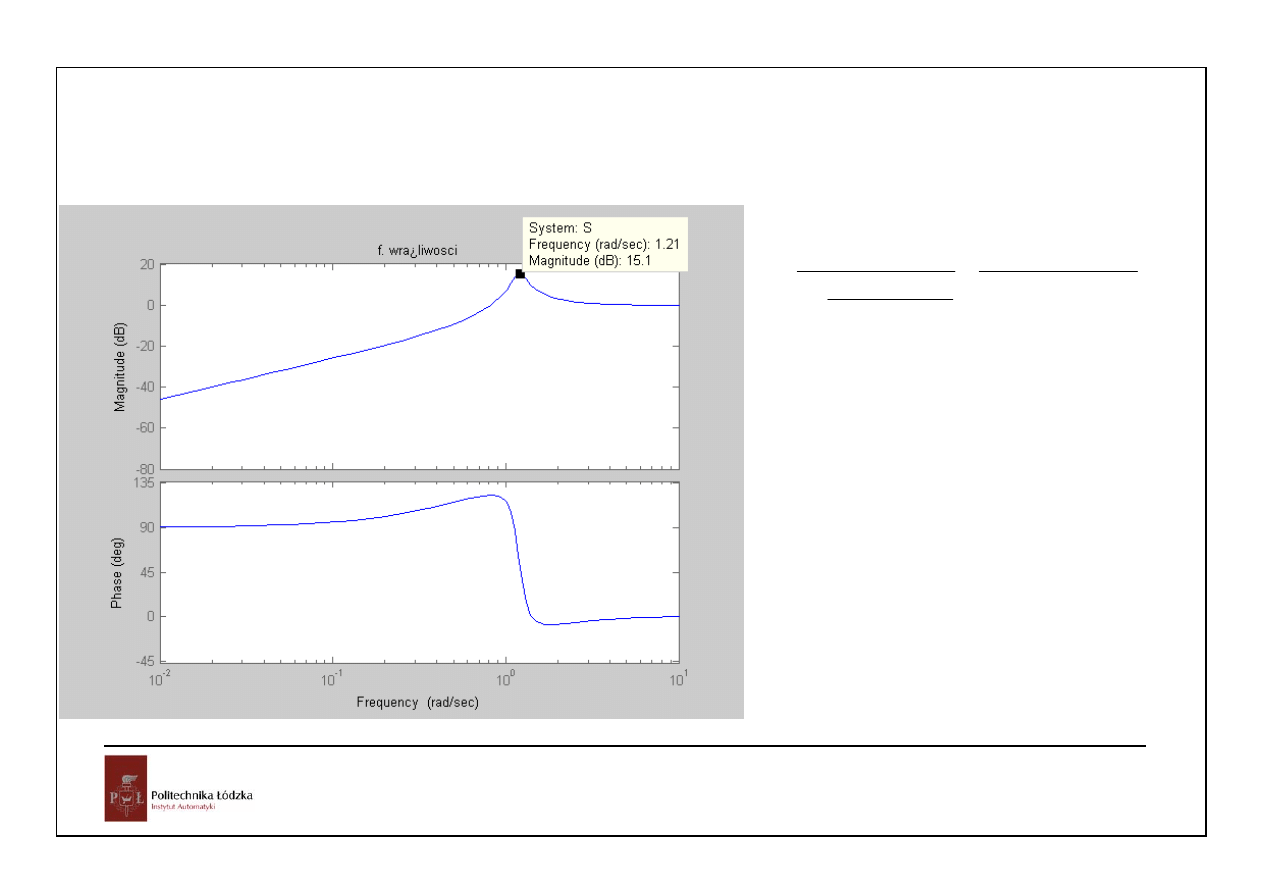
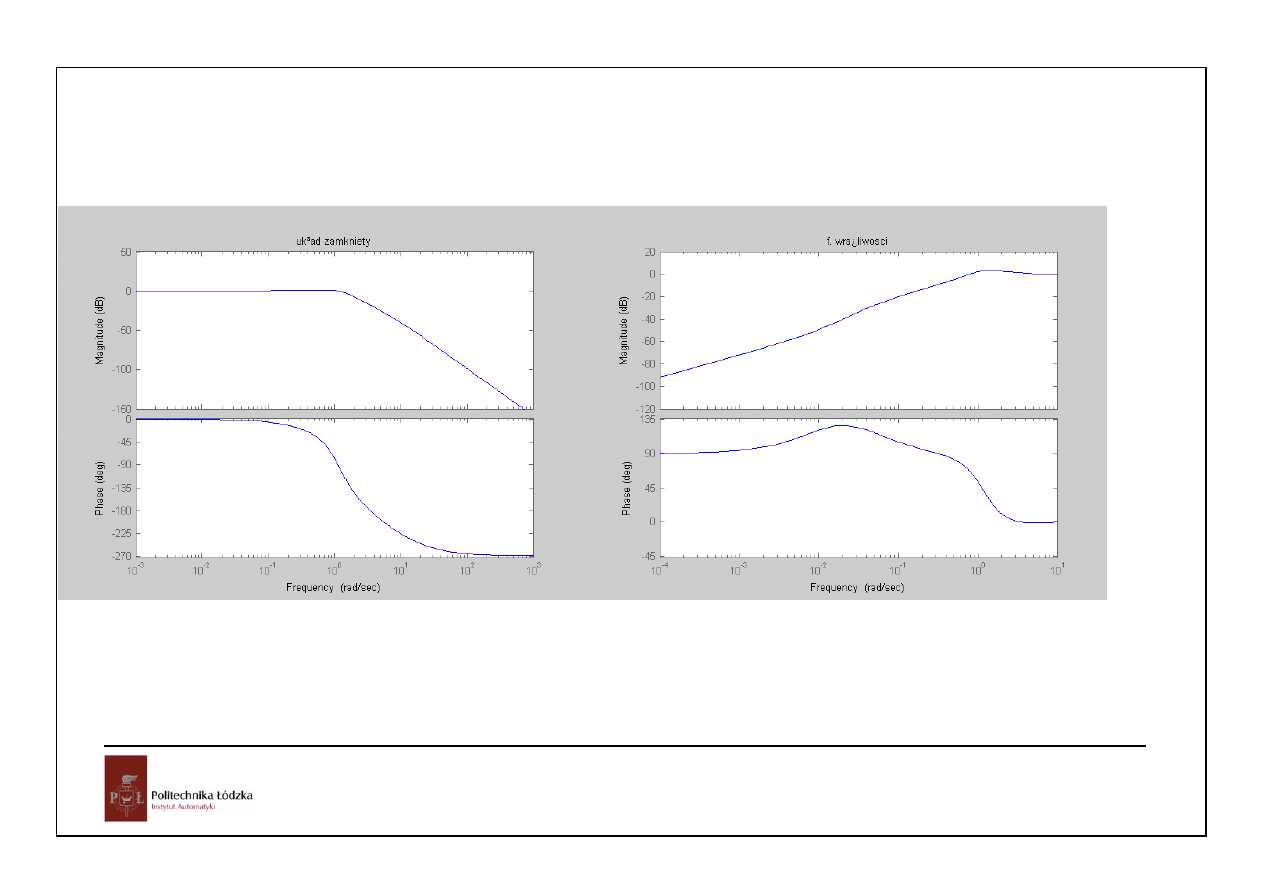
2
2
2
1
3
2
4
3
2
4
1
3
2
s( s
s
)
S
s( s
s
)
s( s
s
)
+
+
=
=
+
+
+
+
+
+
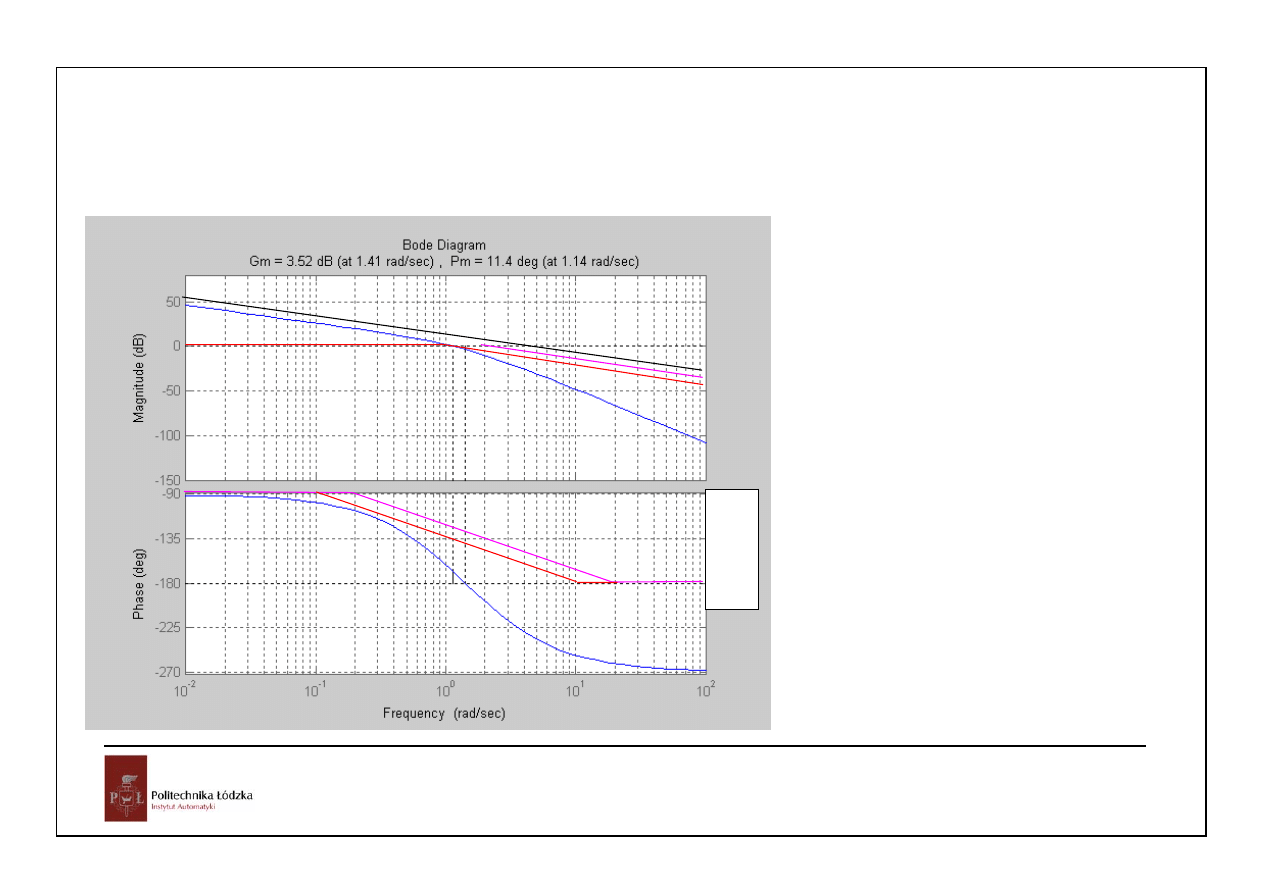
15
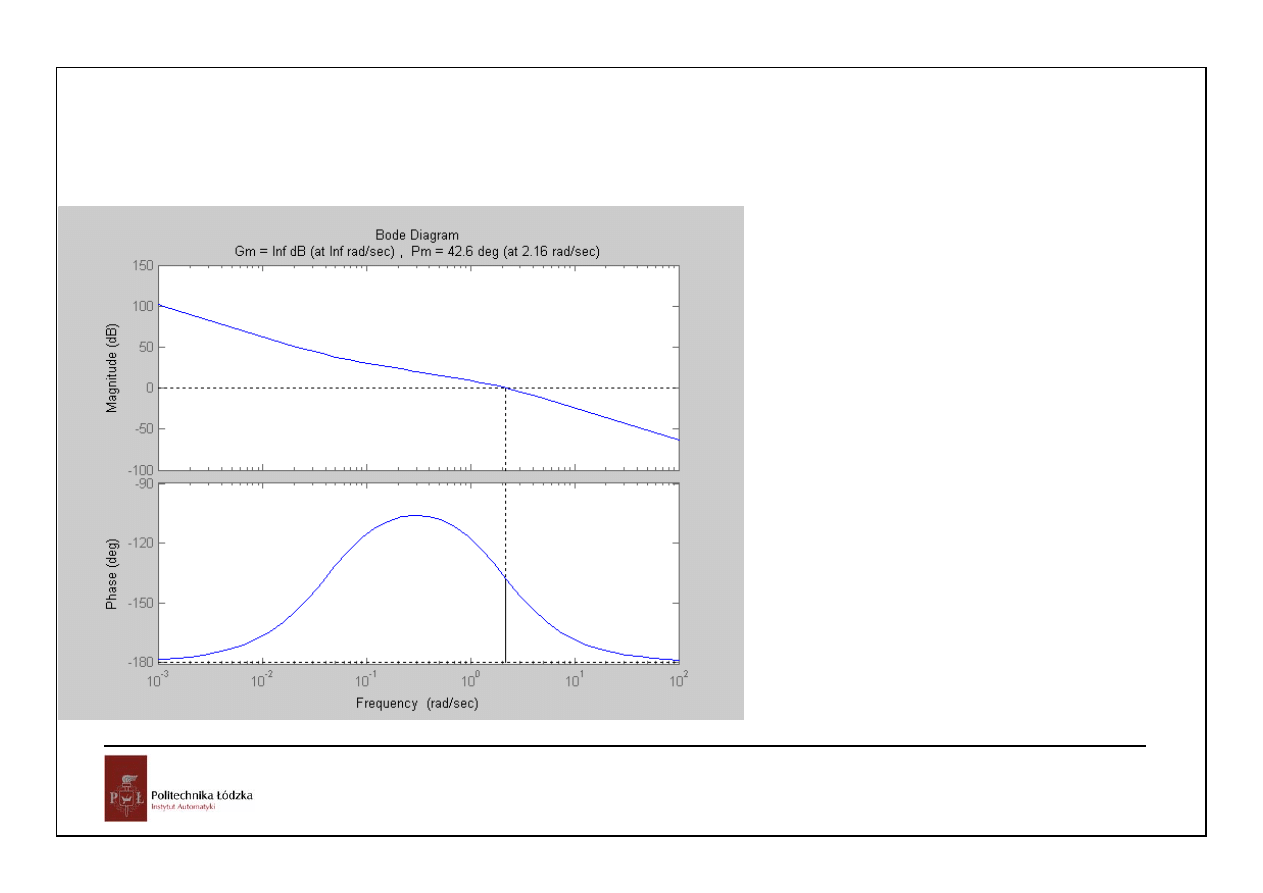
Automatyka i sterowanie 10 Przykłady
Układy czasu ciągłego
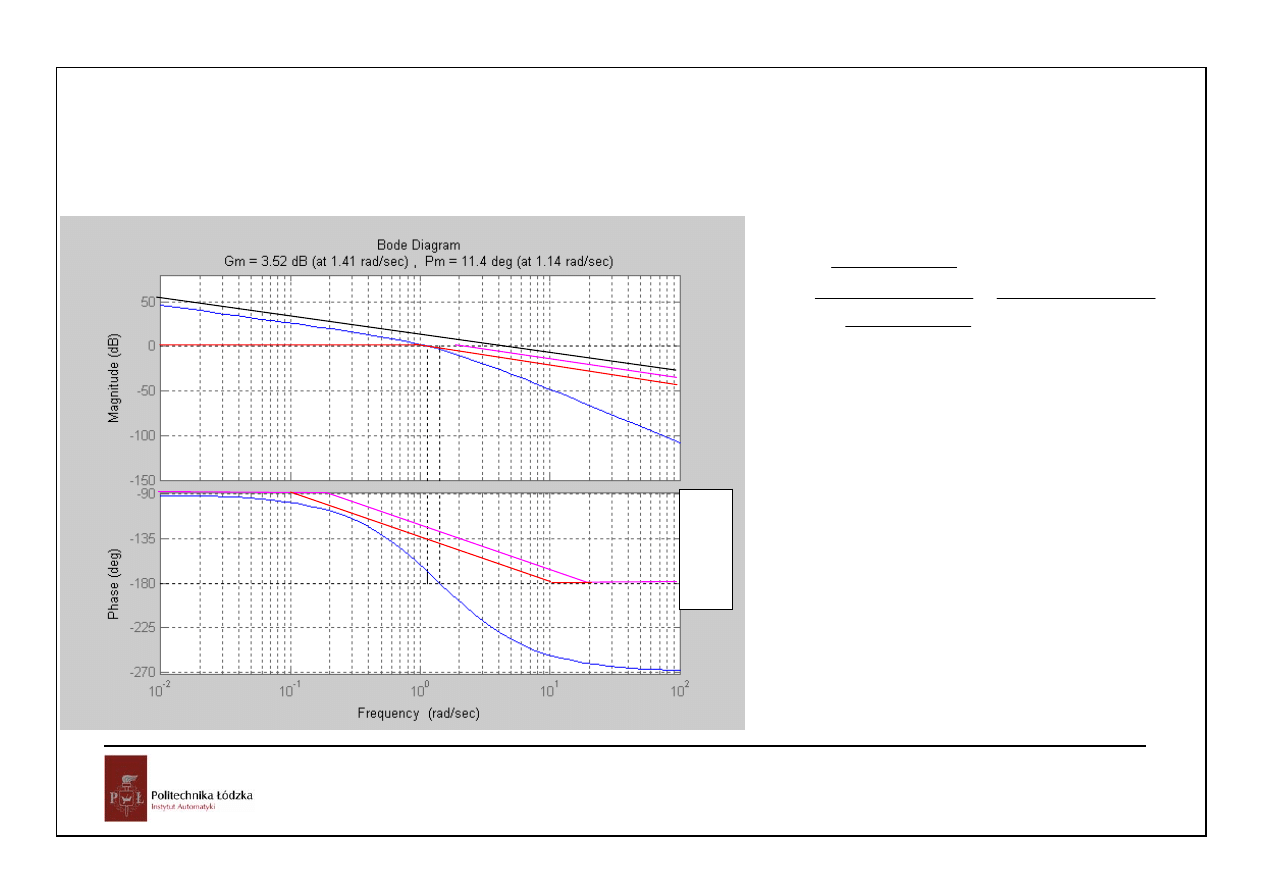
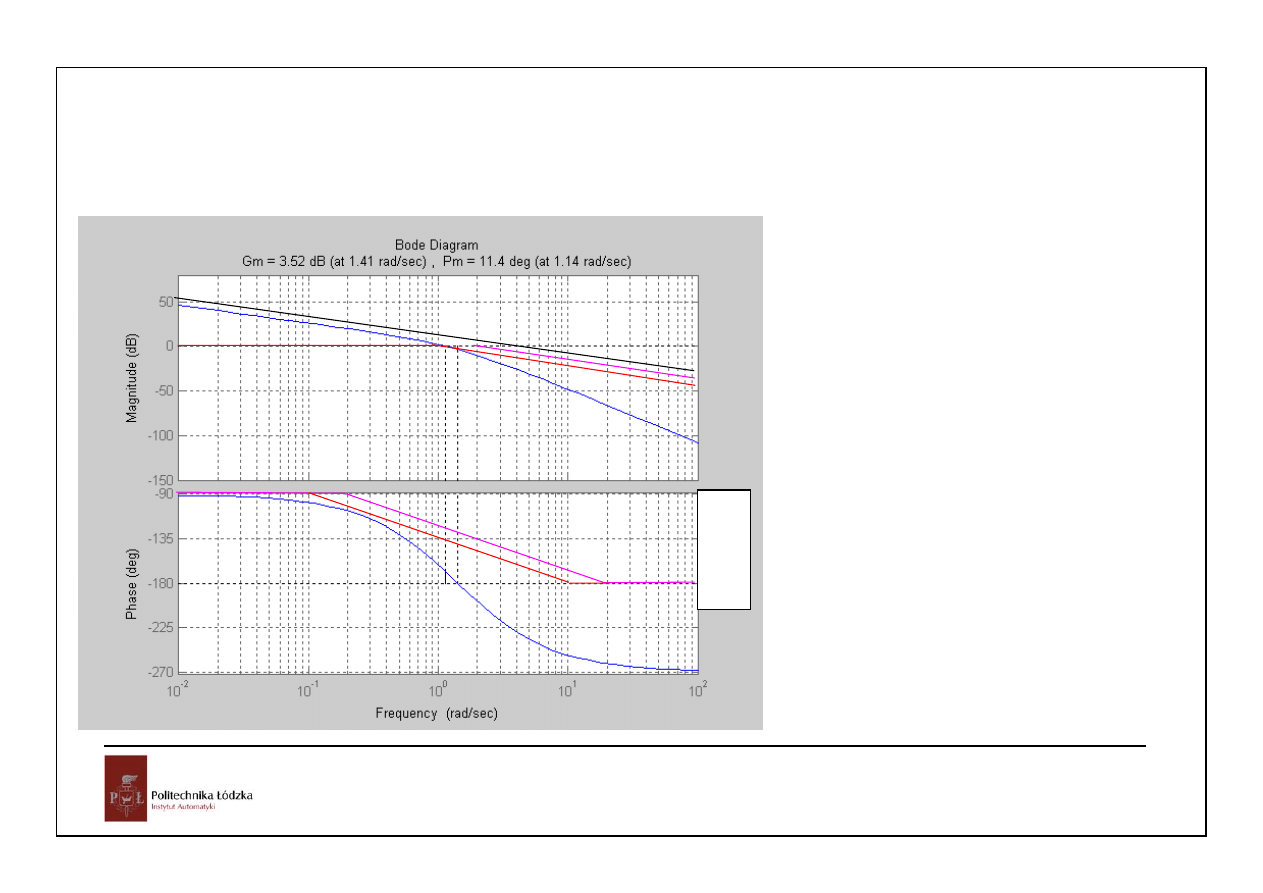
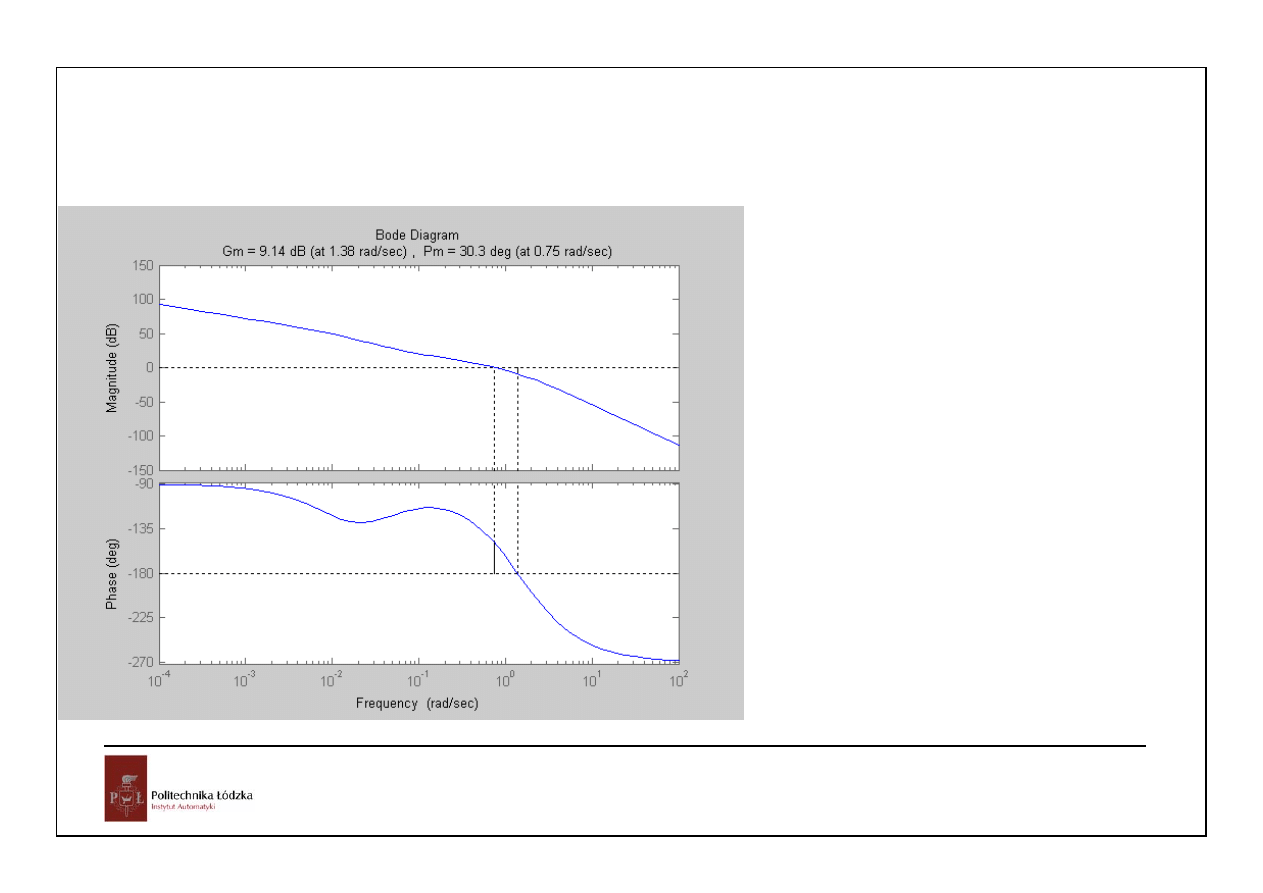
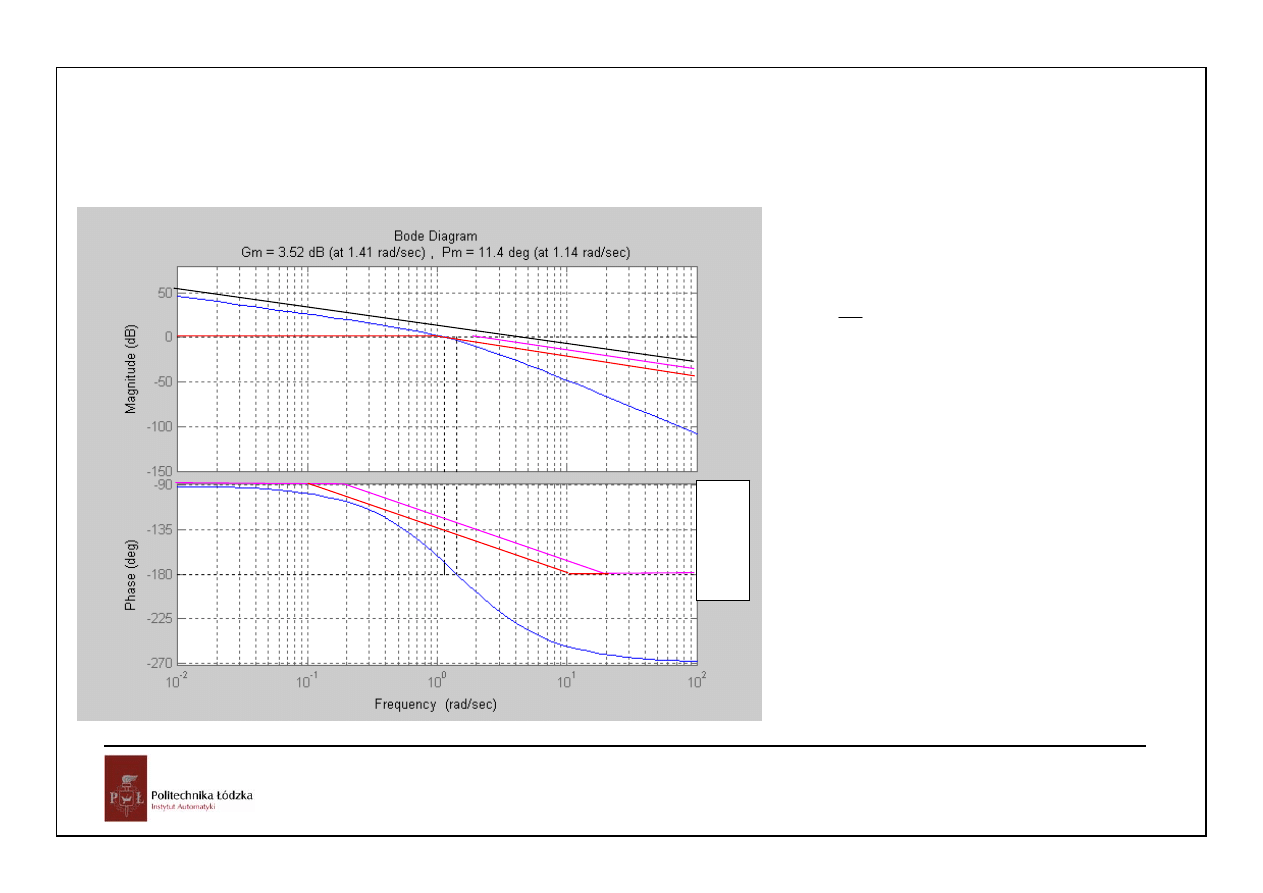
Zwiększenie współczynnika
wzmocnienia układu otwartego do
wartości 10^(3.52/20)=1.4997
doprowadzi do utraty stabilności.
Podobnie włączenie opóźnienia
dającego przesunięcie fazowe
11.4deg przy pulsacji 1.14 rad/sek
czyli 0.1745 sek.
Zmniejszając współczynnik
wzmocnienia układu otwartego
potrafimy powiększyć zapasy
stabilności kosztem zmniejszenia
pasma przenoszenia i wzrostu
uchybu ustalonego przy
wymuszeniu liniowym. Np. dla
C=0.16.
16
Automatyka i sterowanie 10 Przykłady
Układy czasu ciągłego
17
Automatyka i sterowanie 10 Przykłady
Układy czasu ciągłego
18
Automatyka i sterowanie 10 Przykłady
Układy czasu ciągłego
19
Automatyka i sterowanie 10 Przykłady
Układy czasu ciągłego
20
Automatyka i sterowanie 10 Przykłady
Układy czasu ciągłego
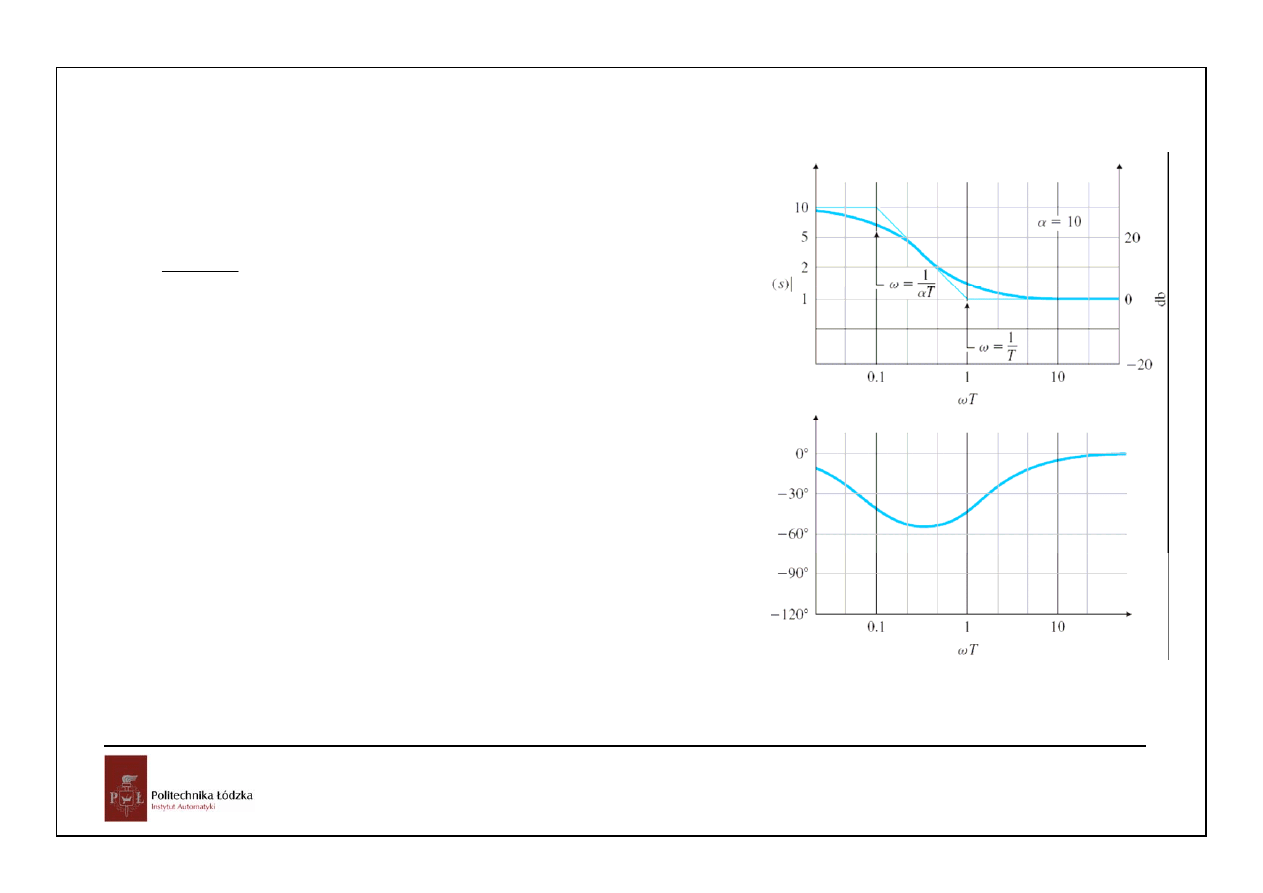
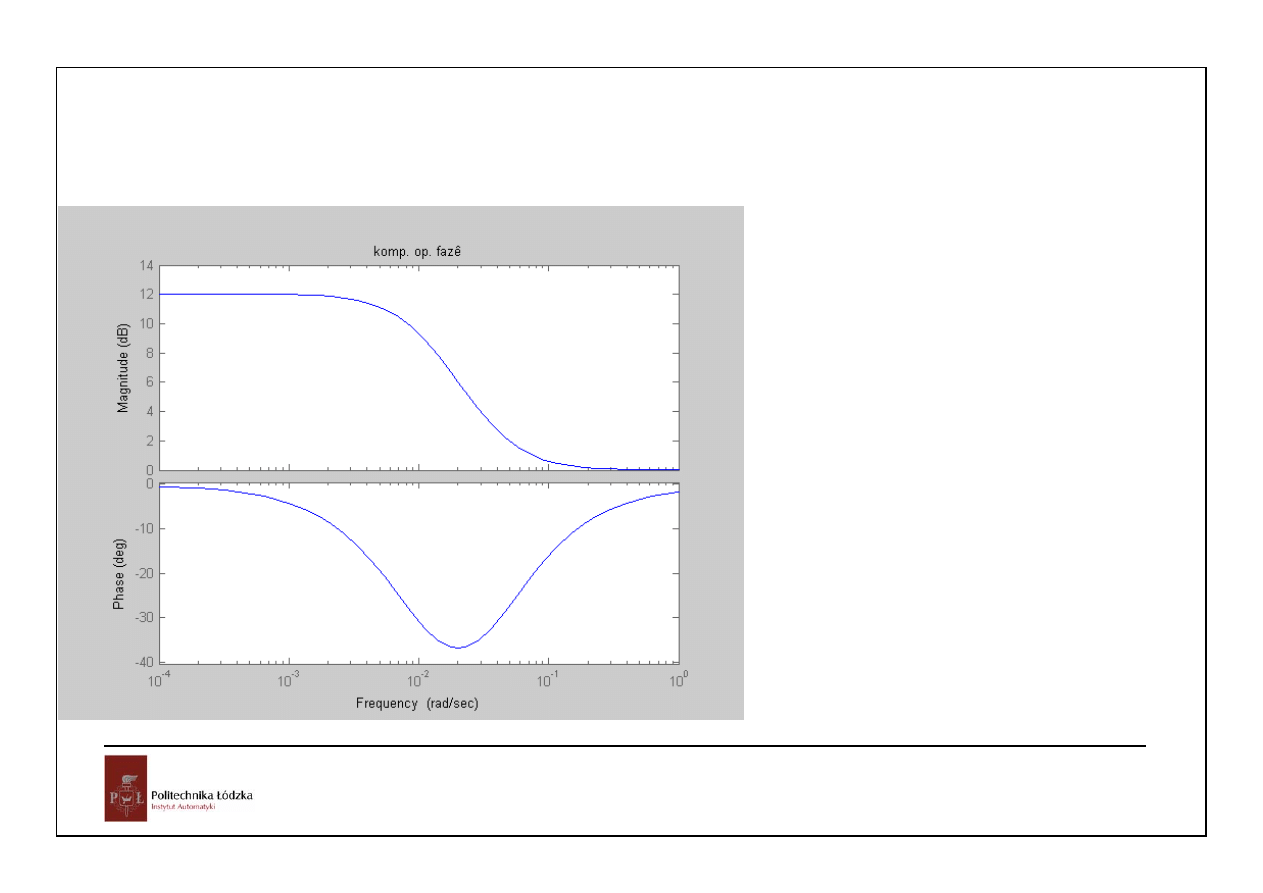
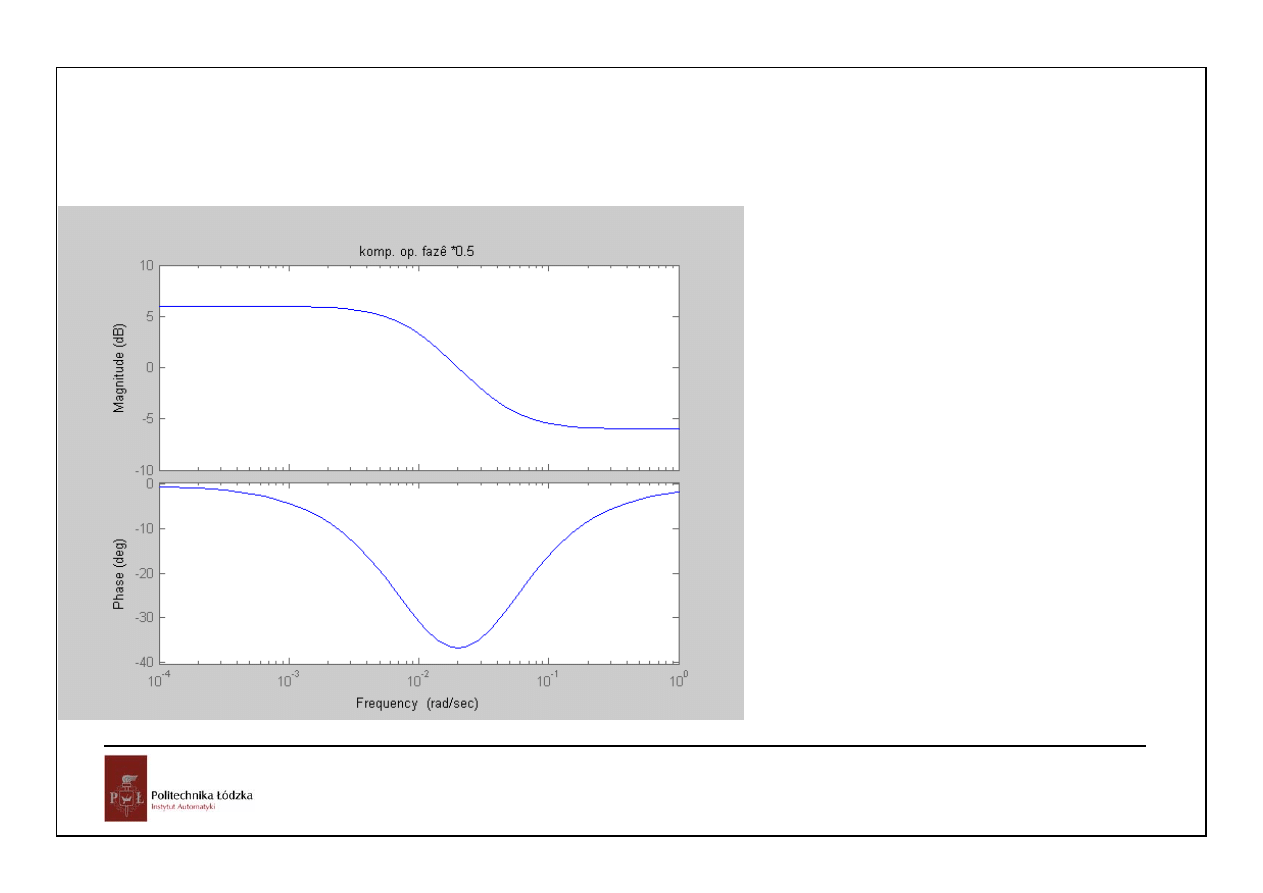
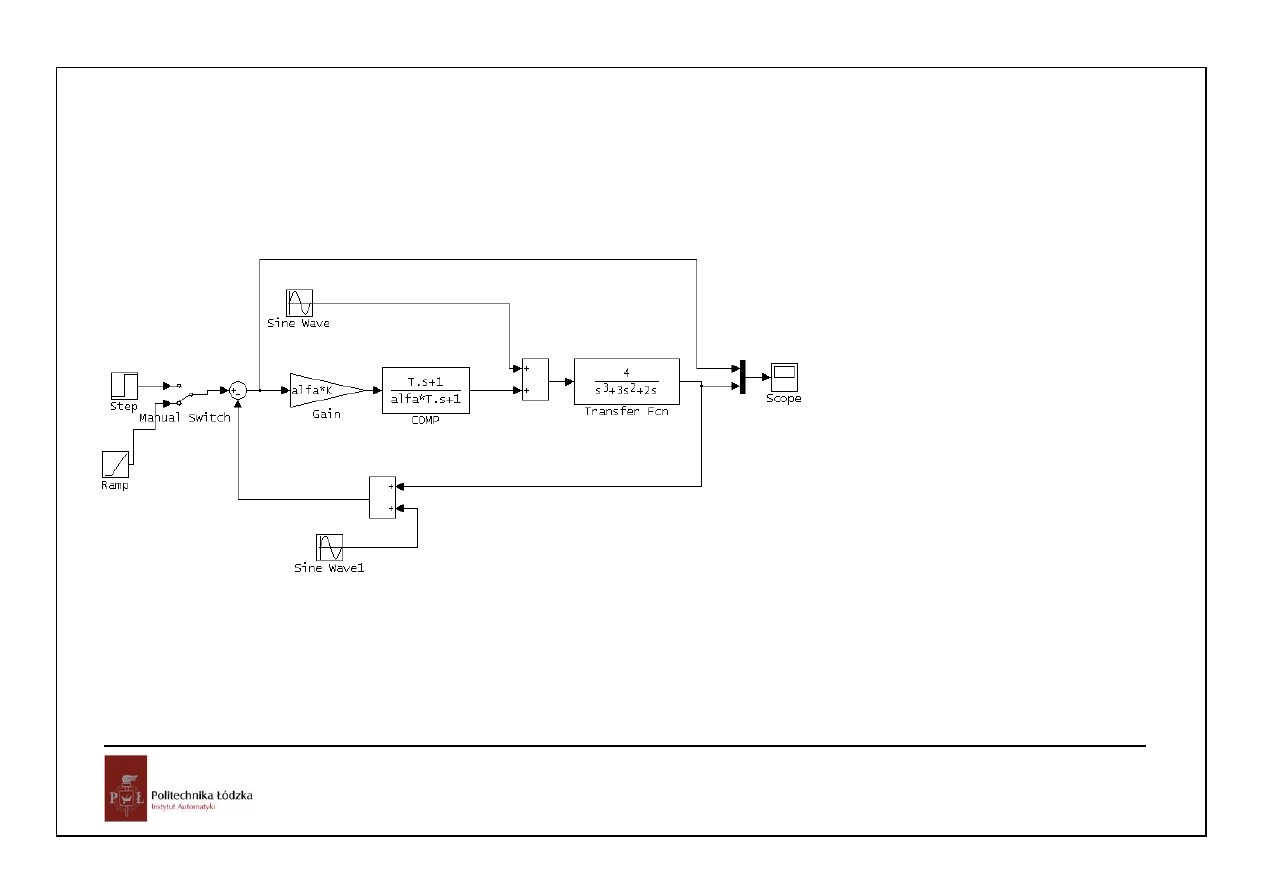
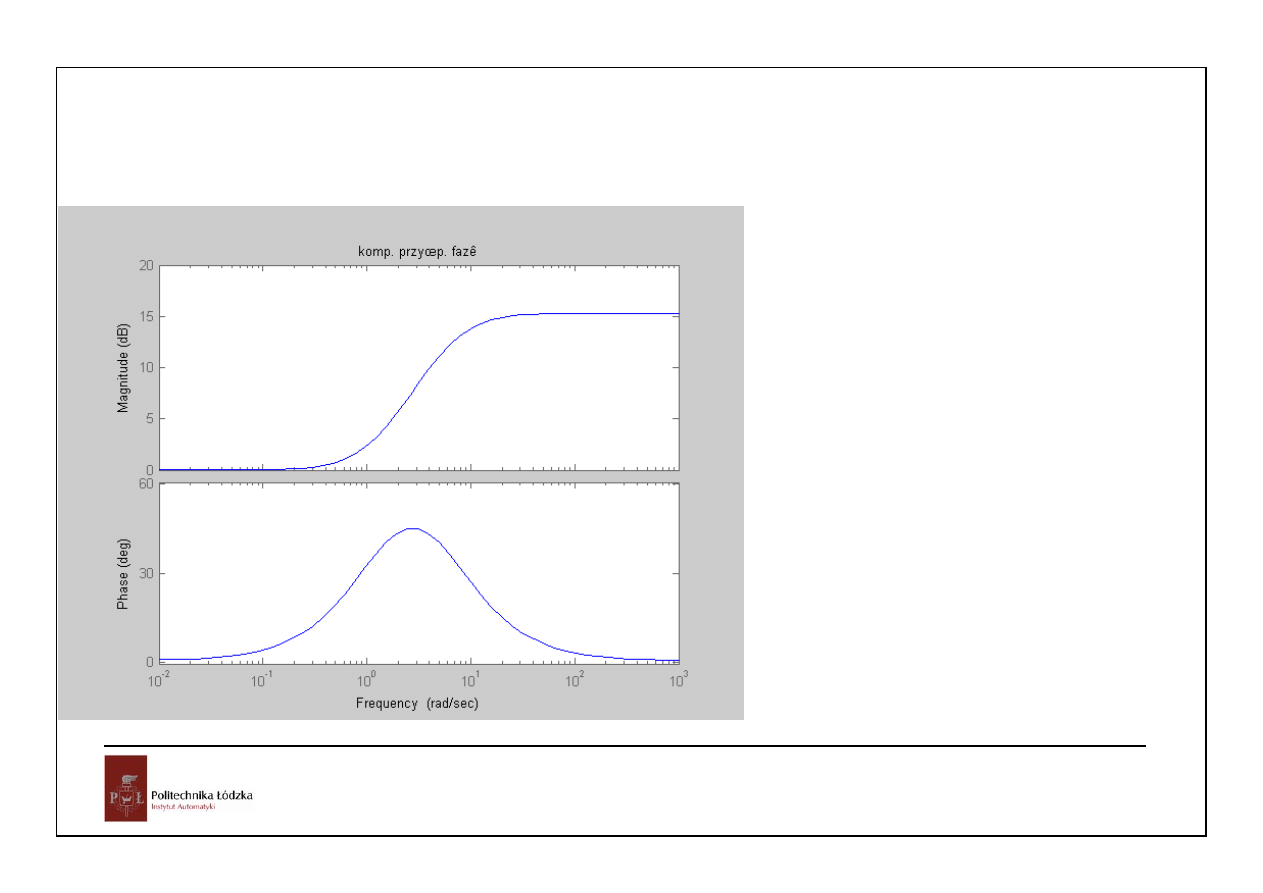
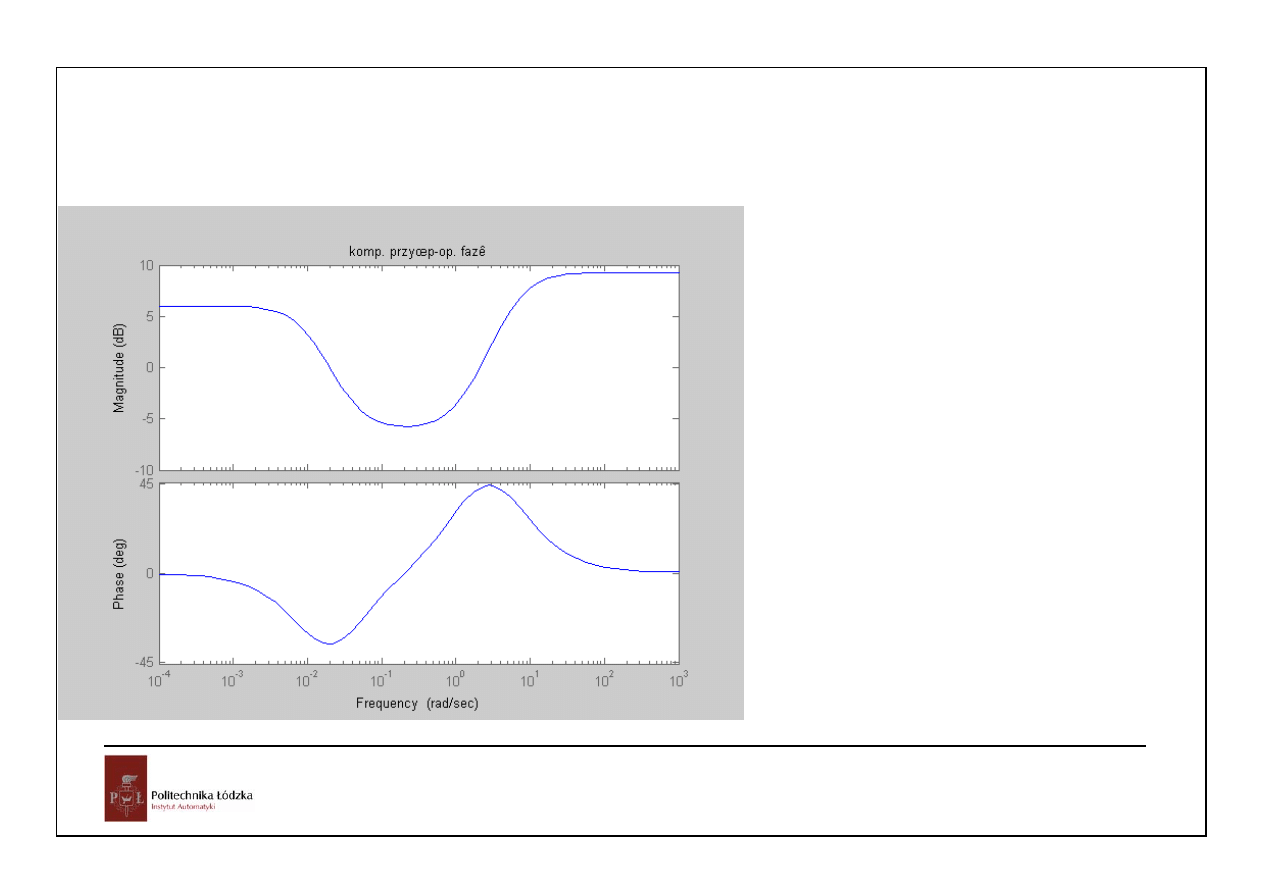
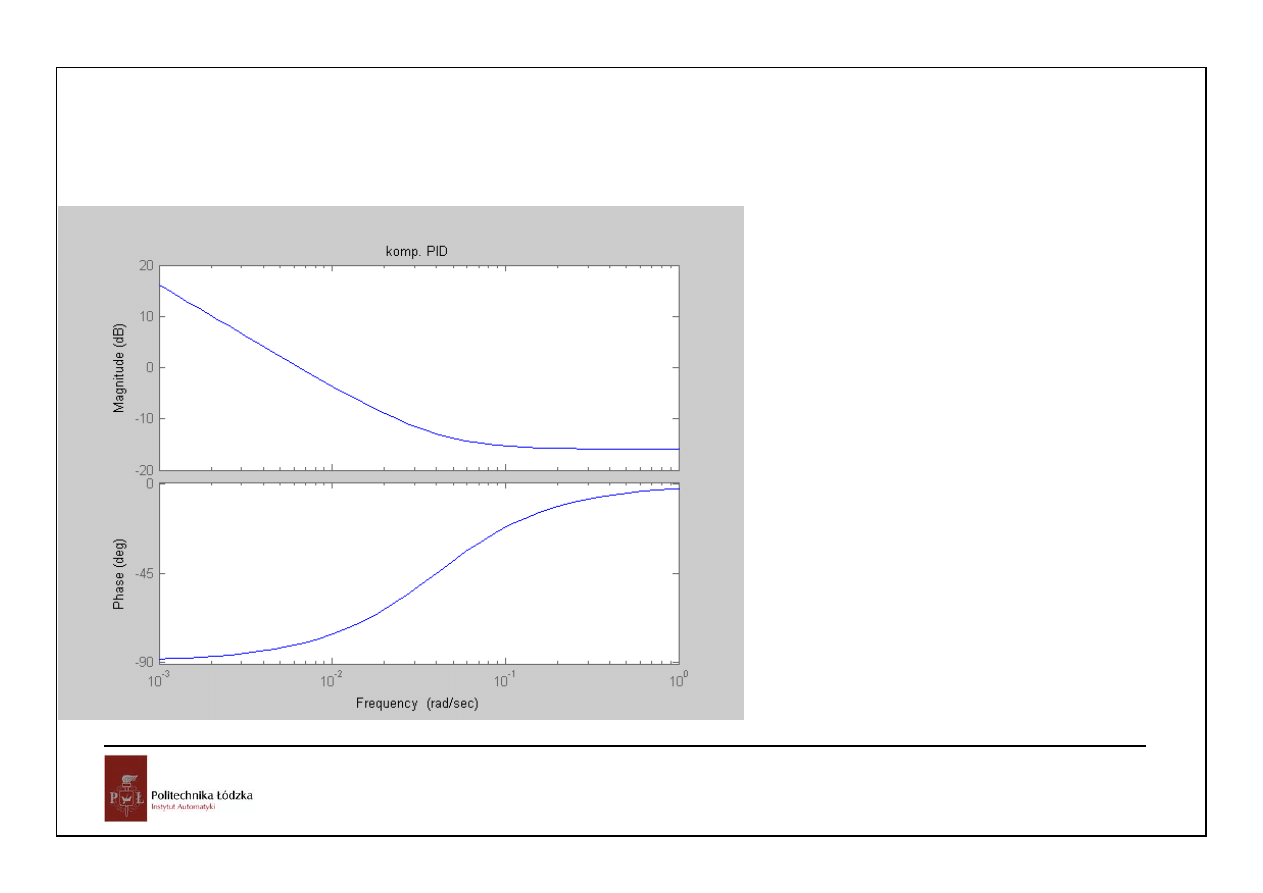
Kompensator opóźniający fazę:
1
1
1
Ts
C( s )
,
Ts
α
α
α
+
=
>
+
wzmocnienie dla małych częstotliwości, ale niekorzystne
opóźnienie fazy
21
Automatyka i sterowanie 10 Przykłady
Układy czasu ciągłego
T=1/0.04=25, alfa=4
0
-45
-90
22
Automatyka i sterowanie 10 Przykłady
Układy czasu ciągłego
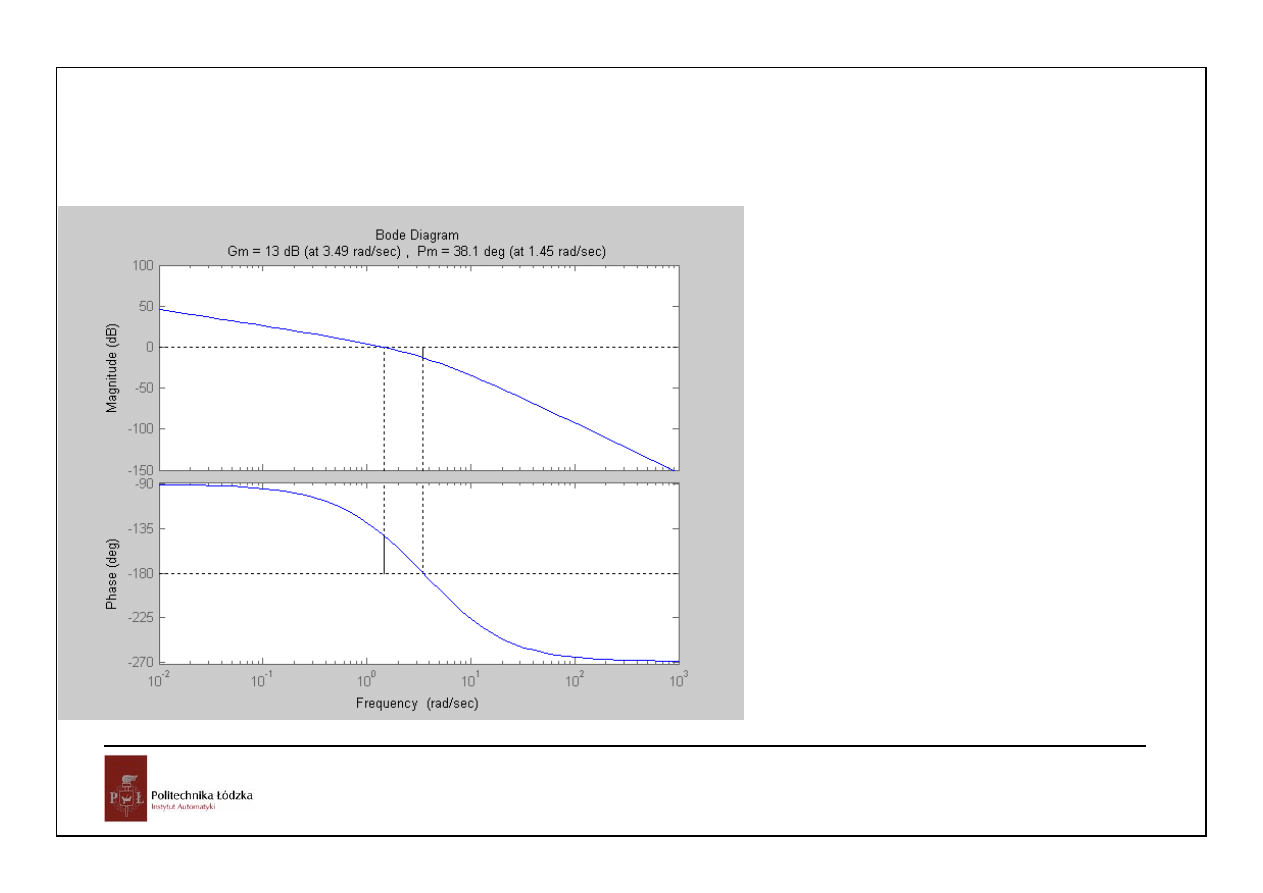
23
Automatyka i sterowanie 10 Przykłady
Układy czasu ciągłego
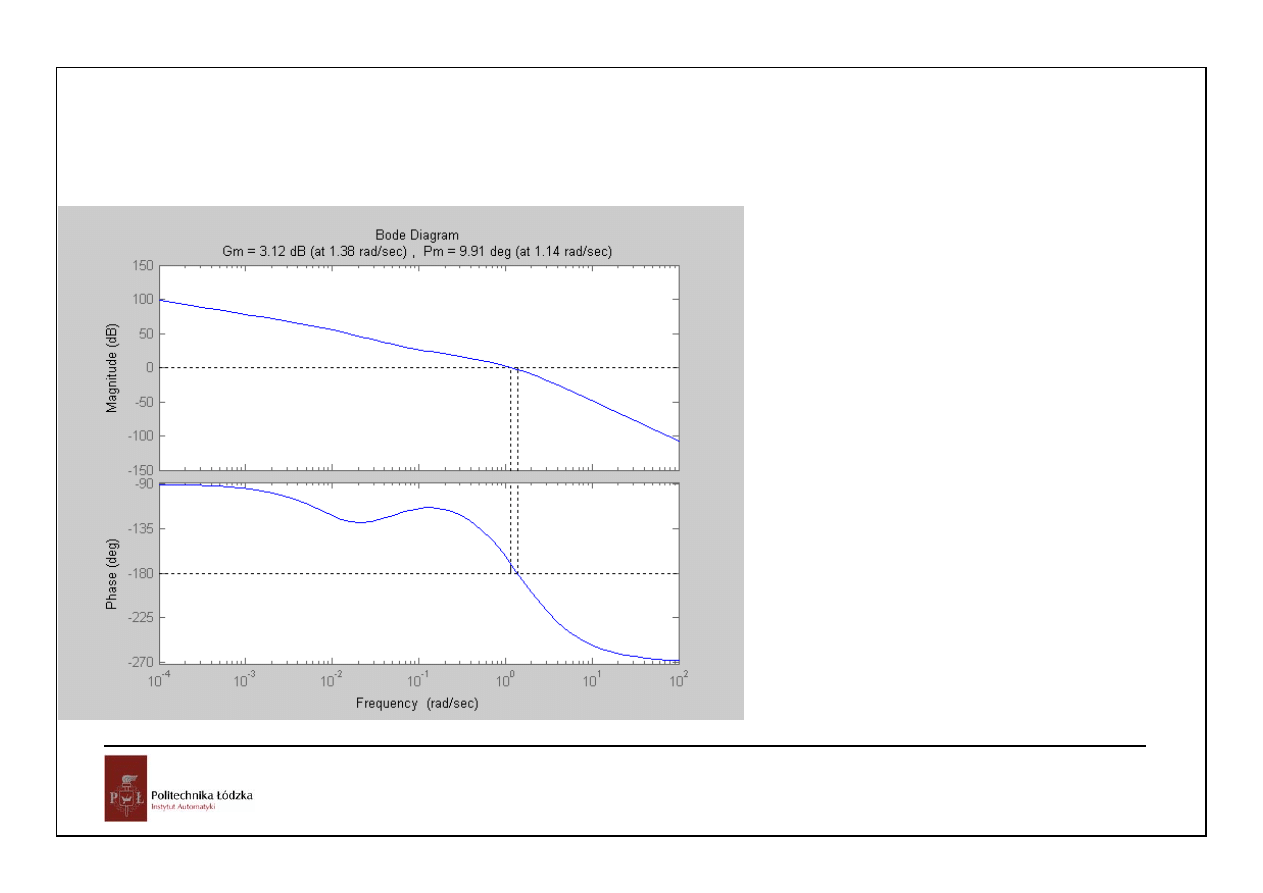
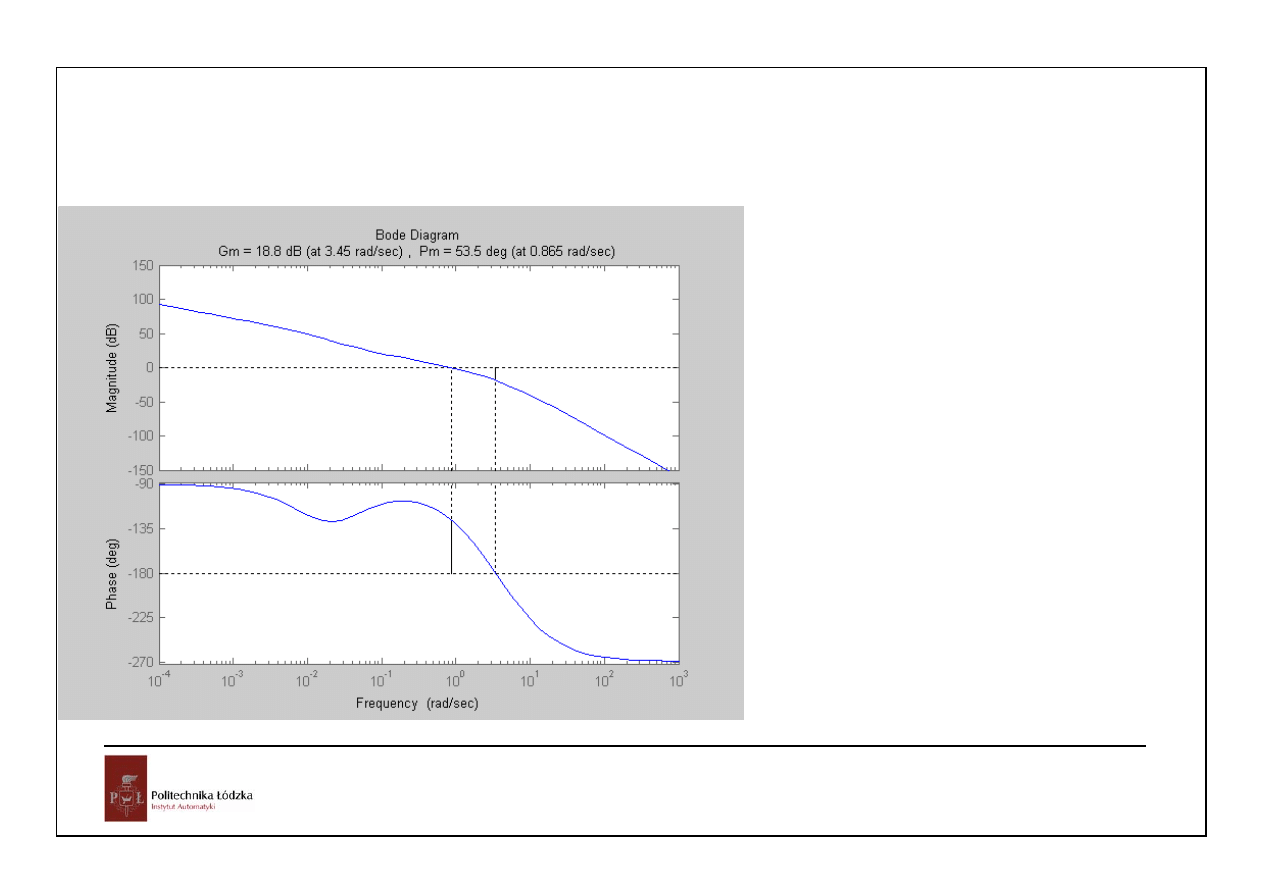
zapas stabilnosci jest mały
24
Automatyka i sterowanie 10 Przykłady
Układy czasu ciągłego
25
Automatyka i sterowanie 10 Przykłady
Układy czasu ciągłego
26
Automatyka i sterowanie 10 Przykłady
Układy czasu ciągłego
jeszcze obniżymy wzmocnienie:K=0.5
27
Automatyka i sterowanie 10 Przykłady
Układy czasu ciągłego
28
Automatyka i sterowanie 10 Przykłady
Układy czasu ciągłego
29
Automatyka i sterowanie 10 Przykłady
Układy czasu ciągłego
30
Automatyka i sterowanie 10 Przykłady
Układy czasu ciągłego
31
Automatyka i sterowanie 10 Przykłady
Układy czasu ciągłego
32
Automatyka i sterowanie 10 Przykłady
Układy czasu ciągłego
33
Automatyka i sterowanie 10 Przykłady
Układy czasu ciągłego
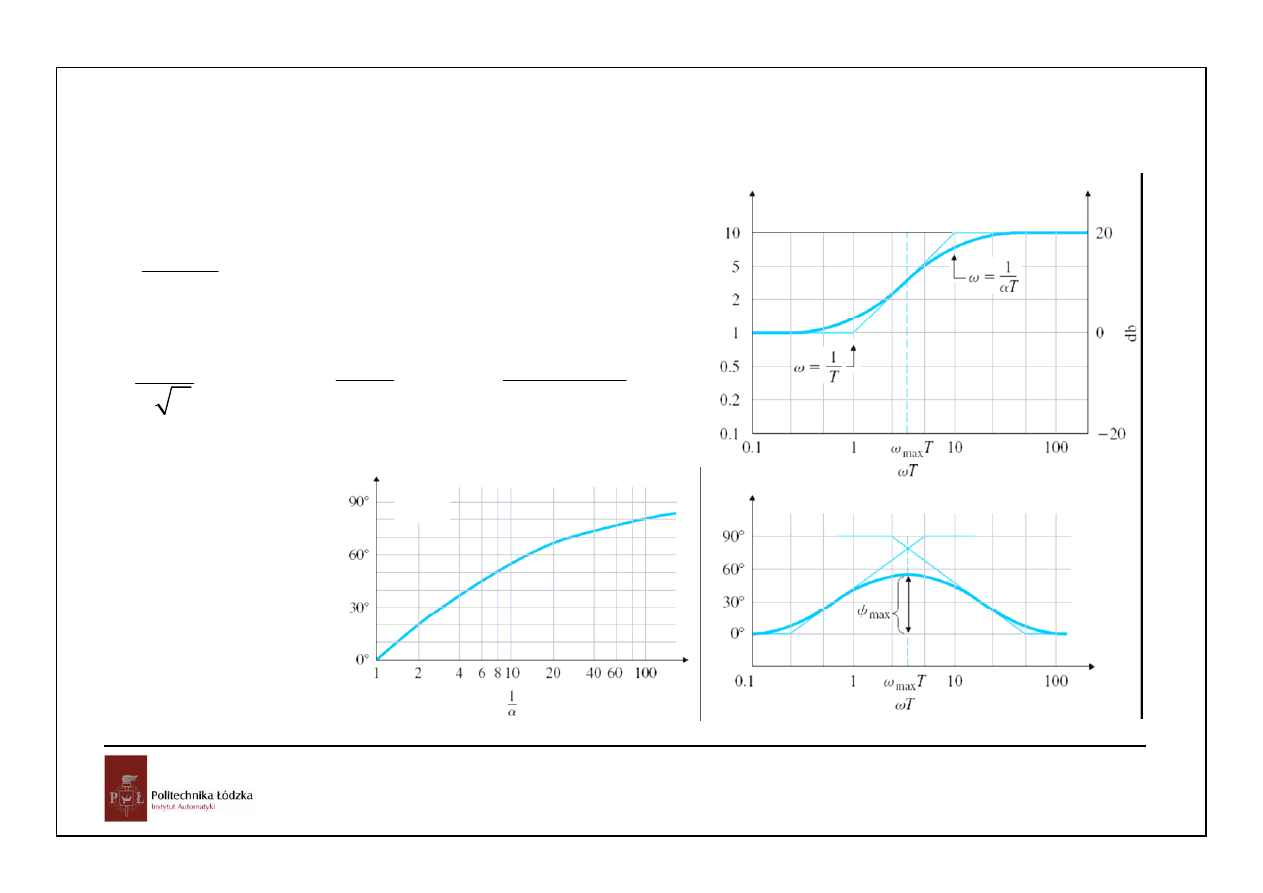
Kompensator przyśpieszający fazę:
1
1
1
Ts
C( s )
,
Ts
α
α
+
=
<
+
arctg( T ) arctg( T )
ϕ
ω
α ω
=
−
1
max
T
ω
α
=
1
1
1
1
max
max
max
sin
sin
sin
α
ϕ
ϕ
α
α
ϕ
−
−
=
⇒ =
+
+
mniejsze α – większe φ
max
- większe wzmocnienie dla
dużych częstotliwości
kompromis:
60
o
max
ϕ
<
max
ϕ
34
Automatyka i sterowanie 10 Przykłady
Układy czasu ciągłego
T=1/1.14=0.8772
alfa=(1-sin(pi/4))/(1+sin(pi/4))=
0.1716
0
-45
-90
35
Automatyka i sterowanie 10 Przykłady
Układy czasu ciągłego
36
Automatyka i sterowanie 10 Przykłady
Układy czasu ciągłego
37
Automatyka i sterowanie 10 Przykłady
Układy czasu ciągłego
38
Automatyka i sterowanie 10 Przykłady
Układy czasu ciągłego
39
Automatyka i sterowanie 10 Przykłady
Układy czasu ciągłego
40
Automatyka i sterowanie 10 Przykłady
Układy czasu ciągłego
połączymy oba komp.
41
Automatyka i sterowanie 10 Przykłady
Układy czasu ciągłego
42
Automatyka i sterowanie 10 Przykłady
Układy czasu ciągłego
43
Automatyka i sterowanie 10 Przykłady
Układy czasu ciągłego
44
Automatyka i sterowanie 10 Przykłady
Układy czasu ciągłego
45
Automatyka i sterowanie 10 Przykłady
Układy czasu ciągłego
46
Automatyka i sterowanie 10 Przykłady
Układy czasu ciągłego
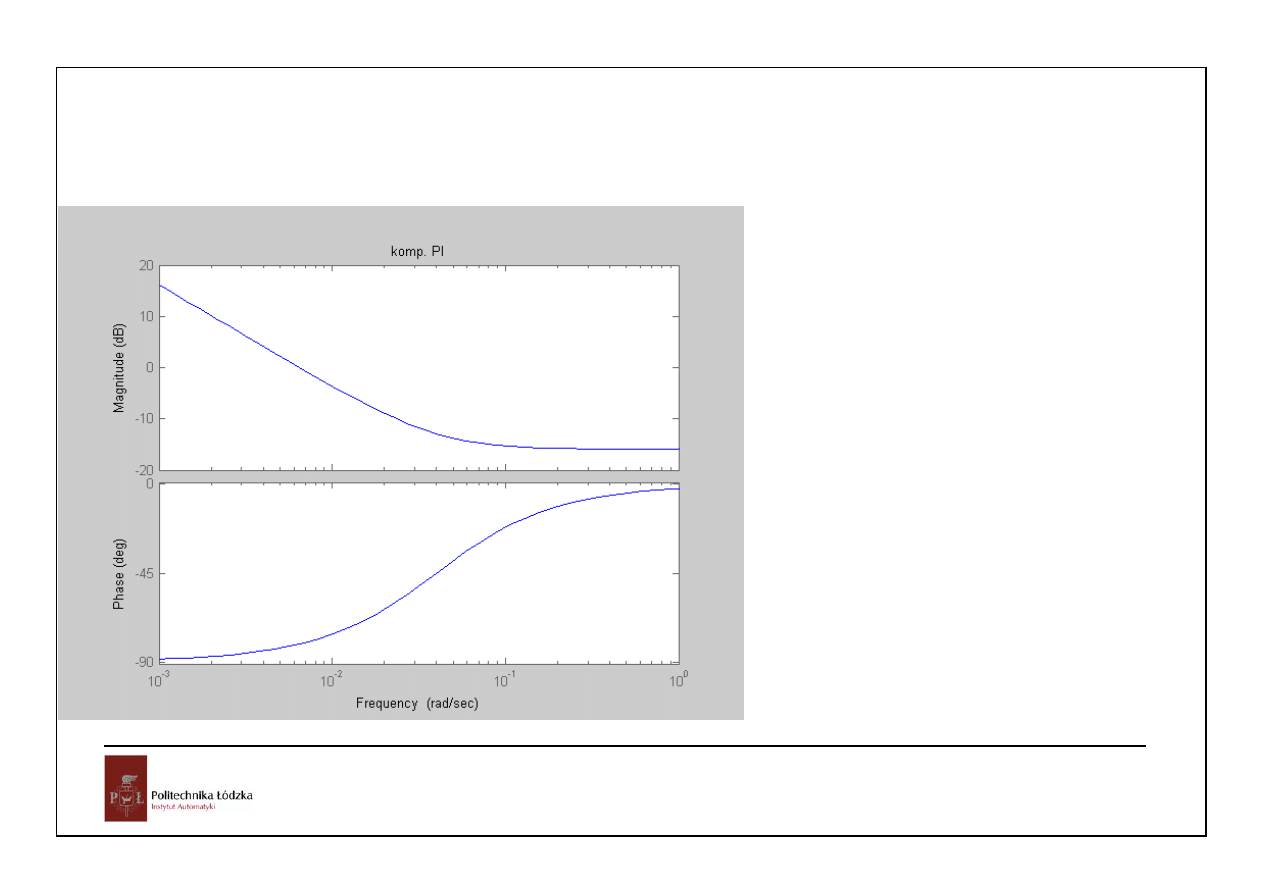
Regulator PI
1
( )
1
c
i
C s
k
sT
⎛
⎞
=
+
⎜
⎟
⎝
⎠
1
( )
1
1( )
c
i
h t
k
t
t
T
⎛
⎞
=
+
⎜
⎟
⎝
⎠
1
( )
1
c
i
k
H s
s
sT
⎛
⎞
=
+
⎜
⎟
⎝
⎠
1
(
)
1
( )
( )
c
c
c
i
i
k
C j
k
k
j
P
jQ
j T
T
ω
ω
ω
ω
ω
⎛
⎞
=
+
=
−
=
+
⎜
⎟
⎝
⎠
Q(
ω
)
P(
ω
)
0
ω
=
∝
ω
=0
k
c
Cz. całkująca
t
e(t)
u(t)
e(t)
T
i
Cz.
2
1 (
)
( ) 20 log
i
c
i
T
k
L
T
ω
ω
ω
+
=
1
1
i
T
ω
=
ω
( )
( )
2
π
ω
ω
ϕ
−
=
i
T
arctg
−
π
4
−
π
2
ω
2
1 (
)
( ) 20 log
i
c
i
T
k
L
T
ω
ω
ω
+
=
1
1
i
T
ω
=
ω
( )
( )
2
π
ω
ω
ϕ
−
=
i
T
arctg
−
π
4
−
π
2
ω
47
Automatyka i sterowanie 10 Przykłady
Układy czasu ciągłego
Ti=1/0.04, kc=0.16
0
-45
-90
1
1
10 ,
0.16
c
i
k
T
−
<
<
48
Automatyka i sterowanie 10 Przykłady
Układy czasu ciągłego
49
Automatyka i sterowanie 10 Przykłady
Układy czasu ciągłego
50
Automatyka i sterowanie 10 Przykłady
Układy czasu ciągłego
51
Automatyka i sterowanie 10 Przykłady
Układy czasu ciągłego
52
Automatyka i sterowanie 10 Przykłady
Układy czasu ciągłego
53
Automatyka i sterowanie 10 Przykłady
Układy czasu ciągłego
54
Automatyka i sterowanie 10 Przykłady
Układy czasu ciągłego
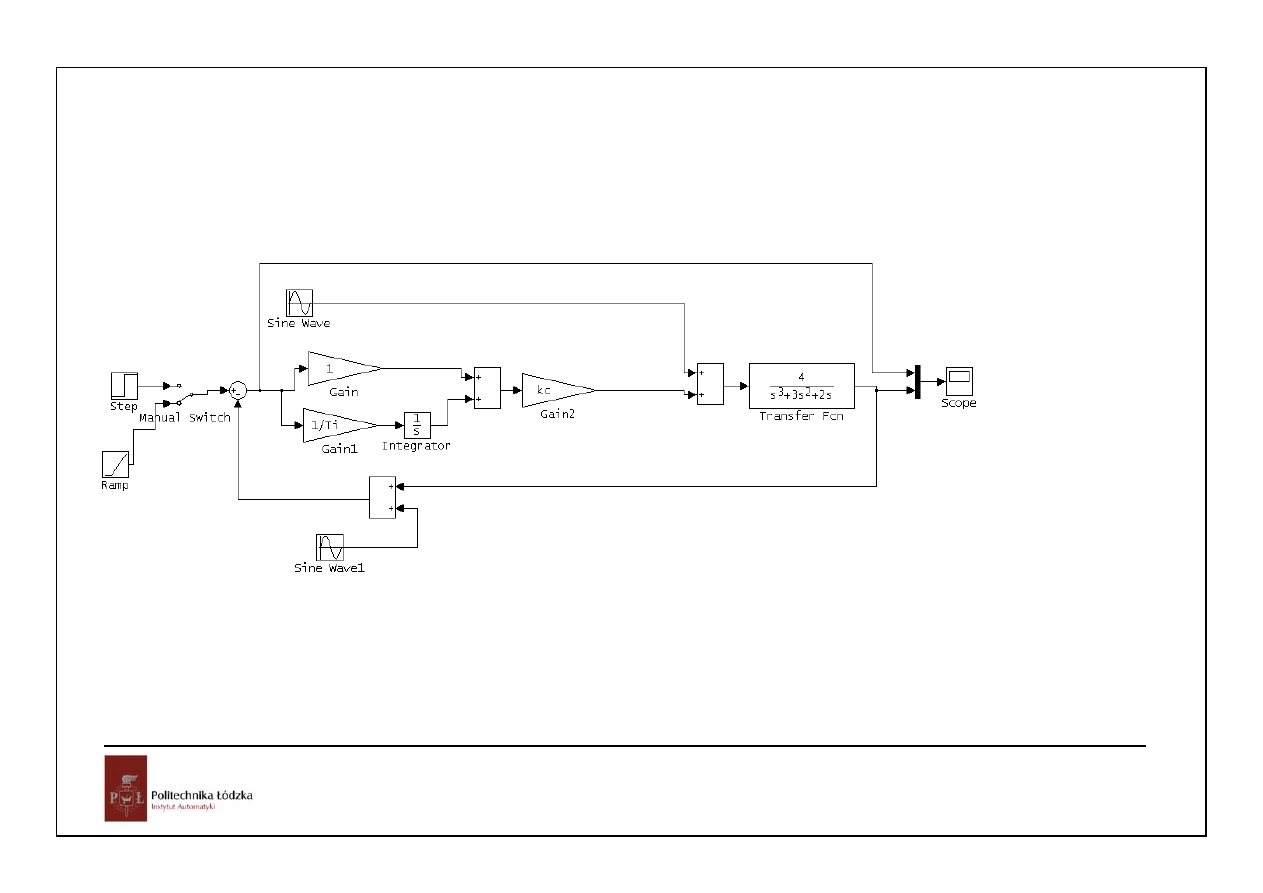
Regulator PID:
T
D
=1, kp=1.6, Ti =1/0.04
s
k
s
k
k
)
s
(
C
d
i
p
+
+
=
1
⎥
⎦
⎤
⎢
⎣
⎡
+
+
=
∫
)
t
(
e
dt
d
T
d
)
(
e
T
)
t
(
e
k
)
t
(
u
d
t
i
p
0
1
τ
τ
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
+
+
=
d
i
p
sT
sT
k
)
s
(
C
1
1
)
t
(
e
dt
d
k
d
)
(
e
k
)
t
(
e
k
)
t
(
u
d
t
i
p
+
+
=
∫
0
τ
τ
π
2
−
π
2
1
T T
I
D
ω
1
T
D
1
T
I
ω
T
I
> T
D
π
2
−
π
2
1
T T
I
D
ω
1
T
D
1
T
I
ω
T
I
> T
D
20log k
p
2
1
( ) 20log
20log
1
p
D
I
L
k
T
T
ω
ω
ω
⎛
⎞
=
+
−
+
⎜
⎟
⎝
⎠
( )
(
)
1
arg
D
I
C j
arctg
T
T
ω
ω
ω
⎛
⎞
=
−
⎜
⎟
⎝
⎠
1
(
)
1
p
d
i
C j
k
j T
j T
ω
ω
ω
⎛
⎞
=
+
+
⎜
⎟
⎝
⎠
Q(
ω)
P(
ω)
0
ω=∝
ω=0
k
p
55
Automatyka i sterowanie 10 Przykłady
Układy czasu ciągłego
56
Automatyka i sterowanie 10 Przykłady
Układy czasu ciągłego
57
Automatyka i sterowanie 10 Przykłady
Układy czasu ciągłego
58
Automatyka i sterowanie 10 Przykłady
Układy czasu ciągłego
59
Automatyka i sterowanie 10 Przykłady
Układy czasu ciągłego
60
Automatyka i sterowanie 10 Przykłady
Układy czasu ciągłego
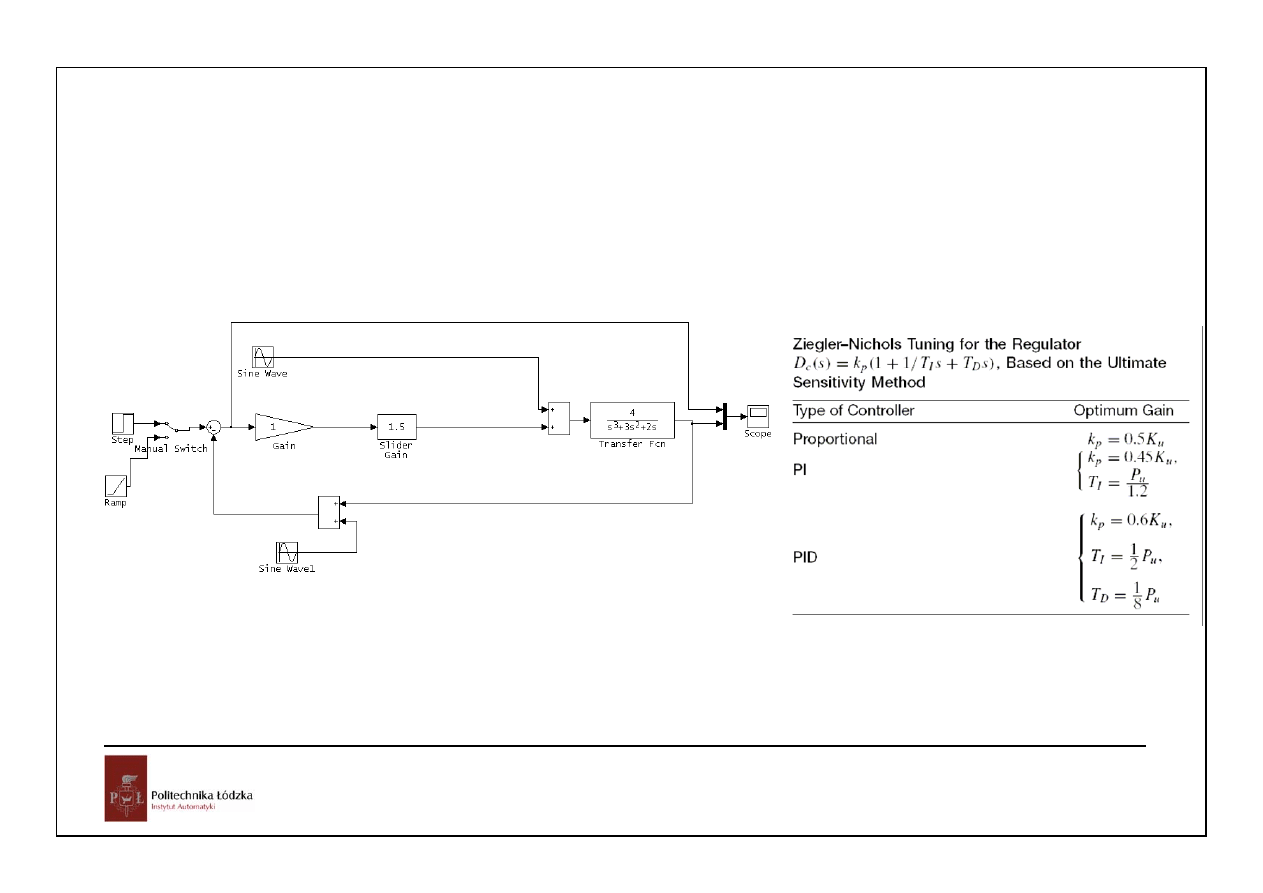
Metoda Zieglera-Nicholsa
61
Automatyka i sterowanie 10 Przykłady
Układy czasu ciągłego
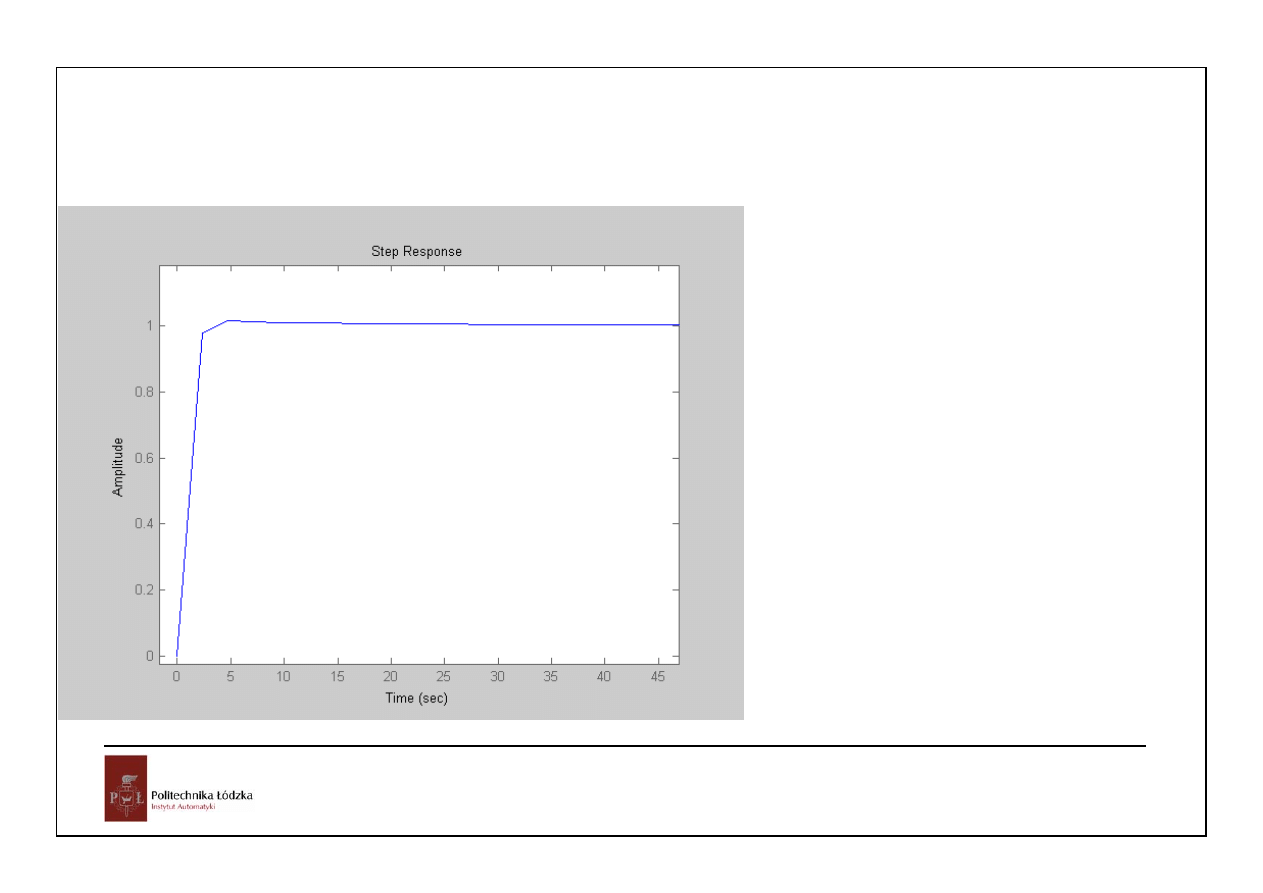
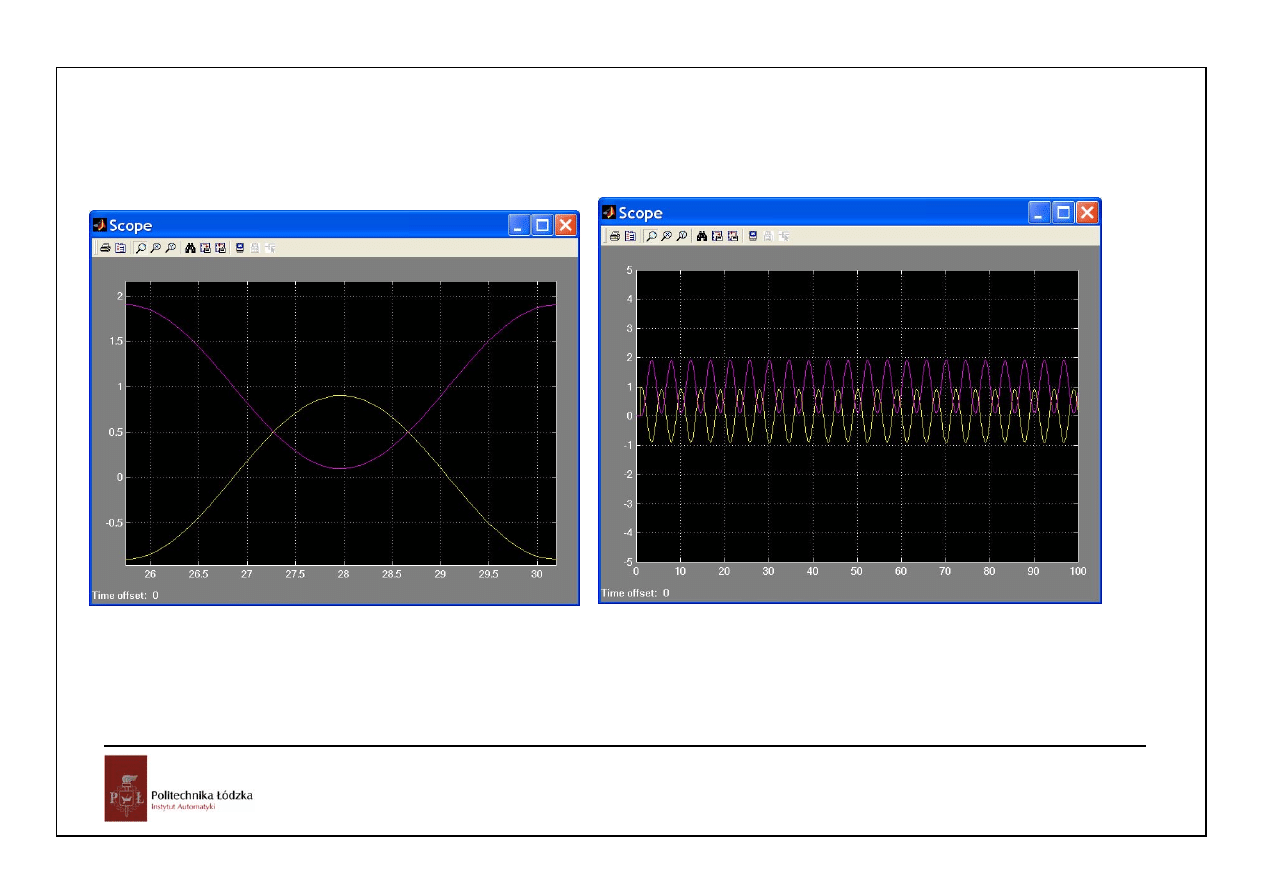
Ku=1.5, Pu=5
Kp=0.6Ku=0.9, Ti=0.5Pu=2.5, Td=Pu/8=5/8
62
Automatyka i sterowanie 10 Przykłady
Układy czasu ciągłego
63
Automatyka i sterowanie 10 Przykłady
Układy czasu ciągłego
64
Automatyka i sterowanie 10 Przykłady
Układy czasu ciągłego
65
Automatyka i sterowanie 10 Przykłady
Układy czasu ciągłego
66
Automatyka i sterowanie 10 Przykłady
Układy czasu ciągłego
67
Automatyka i sterowanie 10 Przykłady
Układy czasu ciągłego
Wyszukiwarka
Podobne podstrony:
automatyka i sterowanie wyklad Nieznany (8)
automatyka i sterowanie wyklad Nieznany (2)
automatyka i sterowanie wyklad Nieznany (14)
automatyka i sterowanie wyklad Nieznany (12)
automatyka i sterowanie wyklad Nieznany (16)
automatyka i sterowanie wyklad Nieznany (5)
automatyka i sterowanie wyklad Nieznany (10)
automatyka i sterowanie wyklad Nieznany (3)
automatyka i sterowanie wyklad Nieznany (8)
automatyka i sterowanie wyklad Nieznany (2)
automatyka i sterowanie wyklad 15
automatyka i sterowanie wyklad 3
automatyczny sterownik oswietle Nieznany (2)
automatyka i sterowanie wyklad 16
automatyka i sterowanie wyklad 9
automatyka i sterowanie wyklad 11
automatyka i sterowanie wyklad 4
automatyka i sterowanie wyklad 5
automatyka i sterowanie wyklad 8
więcej podobnych podstron