Jacek Kabziński
Automatyka i sterowanie
————————————————————————————————————————
2
Automatyka i sterowanie19 Powtórzenie
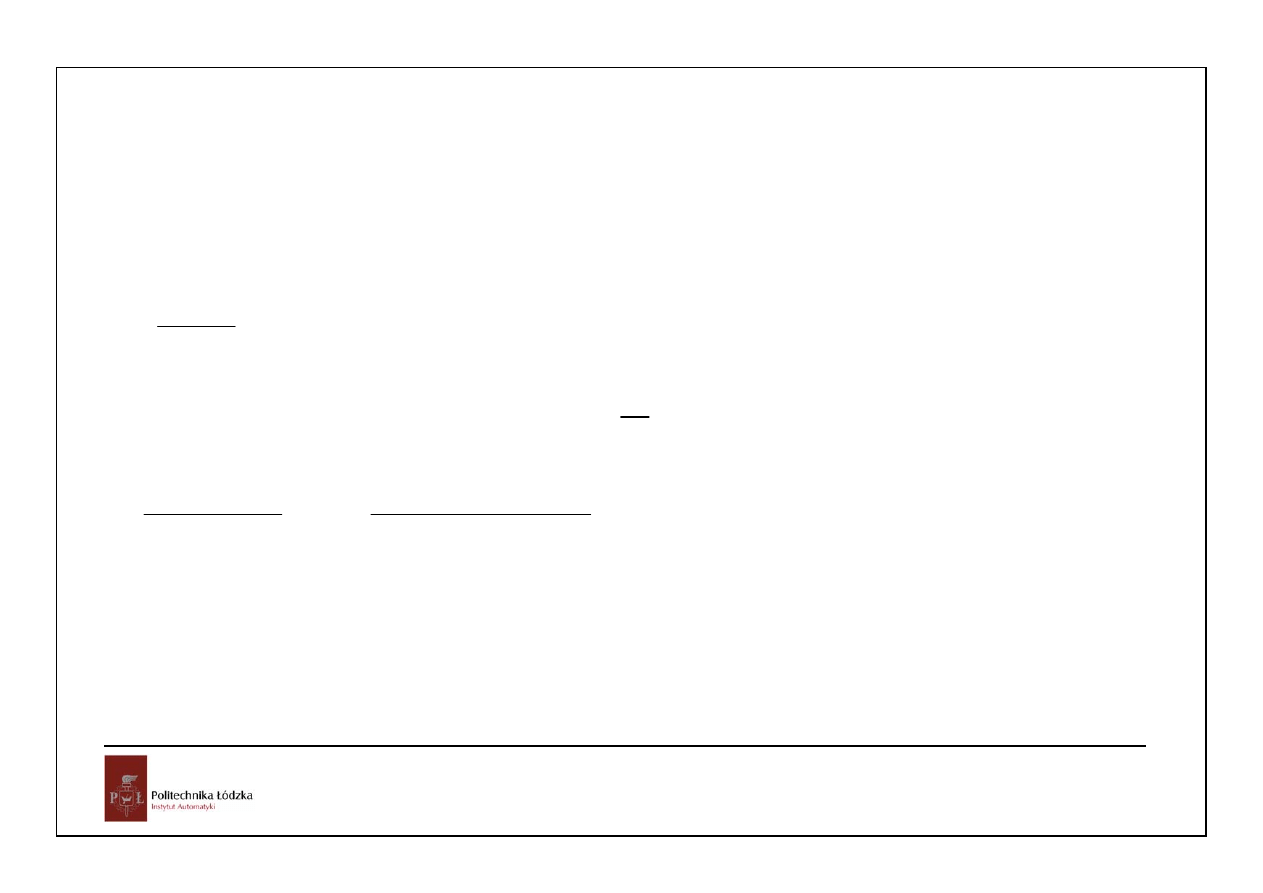
1. Wyznaczenie transmitancji z równania różniczkowego/różnicowego.
Liniowe, stacjonarne równanie różniczkowe
n – rząd układu, stałe współczynniki,
warunki początkowe: y(0), y’(0), …,y
(n-1)
(0)
Możemy wyznaczyć rozwiązanie korzystając z transformaty Laplace’a
Pamiętamy, że
0
df ( t )
L
sF( s ) f ( )
dt
⎡
⎤ =
−
⎢
⎥
⎣
⎦
( )
(
)
( )
(
)
1
1
1
1
0
1
1
0
...
( )
...
( )
n
n
m
m
n
n
m
m
a y
a y
a y a y t
b u
b u
b u b u t
−
−
−
−
+
+ +
+
=
+
+ +
+
m
n
≥
[
]
0
st
L f ( t )
f ( t )e dt
F( s )
∞
−
=
=
∫
3
Automatyka i sterowanie19 Powtórzenie
[
]
2
2
2
0
0
0
0
0
d f ( t )
d df ( t )
df ( t )
L
L
sL
f '( ) s sF( s ) f ( )
f '( )
dt
dt
dt
dt
s F( s ) sf ( ) sf '( )
⎡
⎤
⎡
⎤
⎛
⎞
⎡
⎤
=
=
−
=
−
−
=
⎜
⎟
⎢
⎥
⎢
⎥
⎢
⎥
⎝
⎠
⎣
⎦
⎣
⎦
⎣
⎦
=
−
−
.....
(
)
(
)
2
1
1
2
0
0
0
0
k
k
k
k
k
k
k
d f ( t )
L
s F( s ) s
f ( ) s
f '( )
sf
( ) f
( )
dt
−
−
−
−
⎡
⎤
=
−
−
− −
−
⎢
⎥
⎣
⎦
…
Przy zerowych warunkach początkowych wykonujemy transformatę Laplace’a obu stron równania:
i otrzymujemy transmitancję układu:
1
0
1
0
...
( )
( )
( )
...
m
m
n
n
b s
b s b
Y s
G s
U s
a s
a s a
+ +
+
=
=
+ +
+
( )
(
)
( )
(
)
0
1
1
1
0
1
1
1
...
...
b
s
b
s
b
s
b
s
U
a
s
a
s
a
s
a
s
Y
m
m
m
m
n
n
n
n
+
+
+
+
=
+
+
+
+
−
−
−
−
4
Automatyka i sterowanie19 Powtórzenie
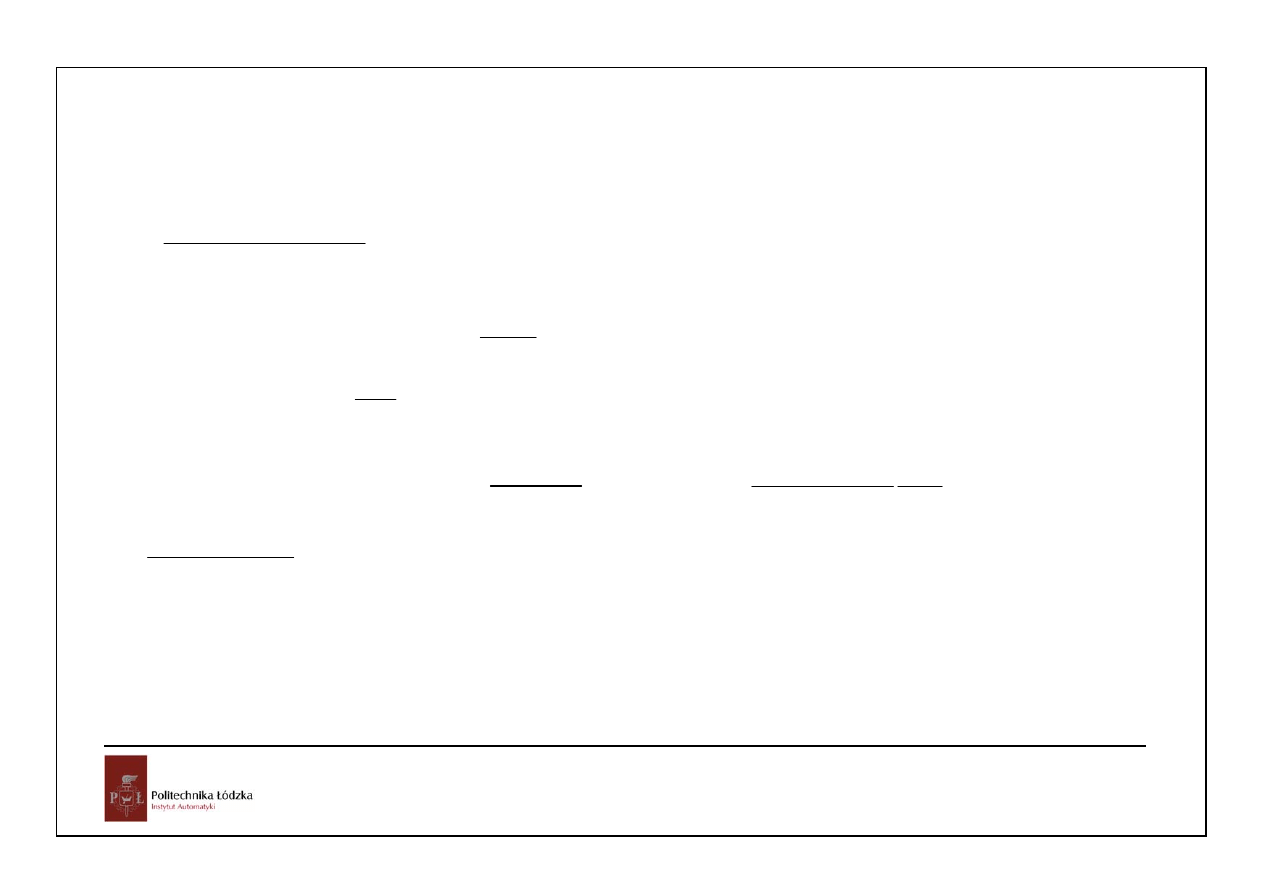
Liniowe równania różnicowe:
(
)
(
)
(
)
)
(
)
(
)
1
(
)
1
(
)
(
0
1
1
kT
f
kT
y
a
T
k
y
a
T
k
n
y
a
T
n
k
y
a
n
n
=
+
+
+
+
−
+
+
+
−
(
)
(
)
(
)
)
(
)
1
(
)
1
(
)
(
)
(
0
1
1
kT
u
b
T
k
u
b
T
k
n
u
b
T
n
k
u
b
kT
f
n
n
+
+
+
+
−
+
+
+
=
−
warunki początkowe:
1
1
0
y( n
), , y( ),y( )
−
{
}
⎟
⎠
⎞
⎜
⎝
⎛
−
=
+
∑
−
=
−
1
0
)
(
)
(
)
(
m
i
i
m
z
i
x
z
X
z
m
k
x
Z
=
m
z X ( z )
1
0
m
m i
i
x( i )z
−
−
=
−
∑
1
1
1
0
n
n
n
n
a z Y ( z ) a z Y ( z )
a zY ( z ) a Y ( z )
−
−
+
=
+ +
+
1
2
1
1
0
0
0
n
n
n i
n i
n
n
i
i
a
y( i )z
a
y( i )z
a zy( )
−
−
−
−
−
=
=
+
=
+
+
∑
∑
+F(z)
5
Automatyka i sterowanie19 Powtórzenie
1
2
0
1
1
1
0
0
0
n
n
n
i
n i
n i
i
n
n
i
i
i
L ( z )
A z
a
y( i )z
a
y( i )z
a zy( )
−
−
−
−
−
=
=
=
=
=
+
+
+
∑
∑
∑
znika dla zerowych warunków początkowych
1
1
1
0
n
n
n
n
M( z ) a z
a z
a z a
−
−
=
+
+ +
+
wielomian charakterystyczny
)
(
)
(
)
(
)
(
0
z
F
z
L
z
Y
z
M
+
=
)
(
)
(
)
(
)
(
)
(
0
z
M
z
F
z
M
z
L
z
Y
+
=
zerowe warunki początkowe
)
(
)
(
)
(
z
M
z
F
z
Y
=
,
⎭
⎬
⎫
⎩
⎨
⎧
=
−
)
(
)
(
)
(
1
z
M
z
F
Z
kT
y
(
)
)
(
)
(
)
(
)
(
0
1
1
1
z
U
z
L
z
U
b
z
b
z
b
z
b
z
F
n
n
n
n
=
+
+
+
+
=
−
−
Transmitancja dyskretna:
)
(
)
(
)
(
),
(
)
(
)
(
)
(
)
(
)
(
z
M
z
L
z
G
z
U
z
G
z
U
z
M
z
L
z
Y
=
=
=
6
Automatyka i sterowanie19 Powtórzenie
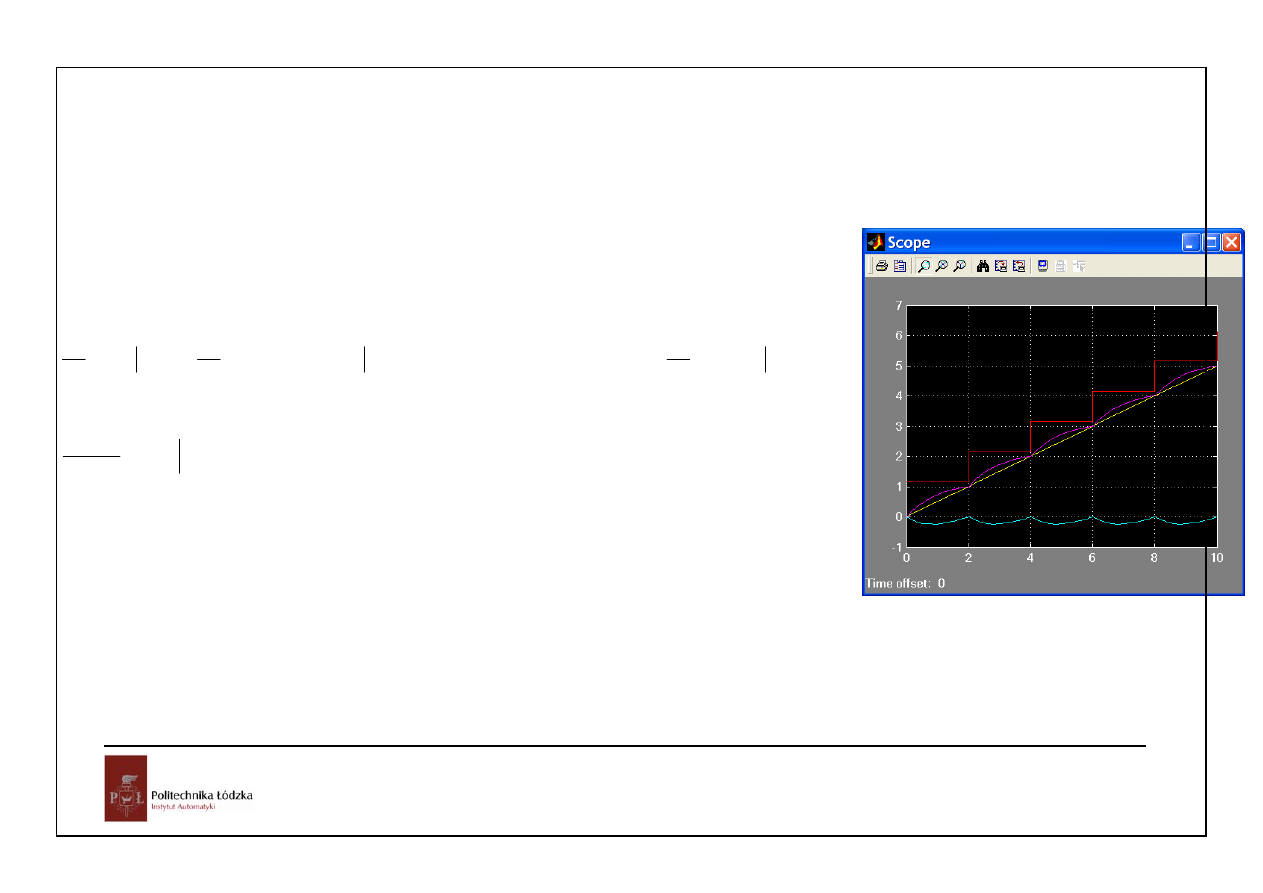
2.Wyznaczanie transmitancji dyskretnej i opisu w przestrzeni stanów układu składającego się z impulsatora i części
ciągłej.
Jeżeli układ o wejściu u i wyjściu y składa się z impulsatora i części ciągłej o transmitancji G(s), to na wejście G(s) do chwili t trafia
ciąg impulsów Diraca
)
(
)
(
iT
t
iT
u
−
δ
. Żeby obliczyć y(t) trzeba zsumować odpowiedzi impulsowe G(s) na wszystkie impulsy do
chwili t. Tak więc:
g(t)=L
--1
{G(s)}
(
)
∑
=
−
=
k
i
iT
u
T
i
k
g
kT
y
0
)
(
)
(
)
(
jest splotem ciągów u(kT) i g(kT), transformata Z będzie więc iloczynem transformat
{
}
)
(
)
(
)
(
z
U
kT
g
Z
z
Y
=
czyli
{
}
)
(
)
(
kT
g
Z
z
G
=
7
Automatyka i sterowanie19 Powtórzenie
3. Definicja i wyznaczanie transmitancji widmowej układu ciągłego i dyskretnego.
Transmitancja widmowa. Charakterystyki częstotliwościowe
Rozważmy ustaloną składową odpowiedzi stabilnego układu o transmitancji G(s) na wymuszenie
m
u( t ) U cos( t )
ω
=
Transformatą Laplace’a tego wymuszenia jest
(
)(
)
2
2
m
m
U s
U s
U( s )
s
s
j
s
j
ω
ω
ω
=
=
+
−
+
mamy więc dwa bieguny związane z
wymuszeniem.
(
)(
)
(
)(
)
(
)
2
2
2
2
j t
j t
j t
j
st
t
st
ust
m
m
s j
s
j
m
m
m
m
U s
U s
Re s G( s )
e
Re s G( s )
e
s j
s
j
s j
y ( t )
U
j
U j
U
U
G( j )
e
G( j )
e
G( j )
e
G( j )
e
j
s
j
j
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
−
−
=
=−
⎛
⎞
⎛
⎞
+
⎜
⎟
⎜
⎟
−
+
−
+
⎝
⎠
⎝
=
−
=
+
−
=
+
⎠
−
−
8
Automatyka i sterowanie19 Powtórzenie
j ( )
j ( )
G( j ) G( j ) e
G( j ) G( j ) e
ϕ ω
ϕ ω
ω
ω
ω
ω
−
=
−
=
(
)
(
)
(
)
(
)
(
)
(
)
2
2
1
2
j
t
(
)
j
t
(
)
j
t
(
)
j
t
(
)
m
m
ust
m
m
U
U
y ( t ) G( j )
e
G( j )
e
G( j ) U
e
e
G( j ) U cos
t
( )
ω ϕ ω
ω ϕ ω
ω ϕ ω
ω ϕ ω
ω
ω
ω
ω
ω ϕ ω
+
−
+
+
−
+
=
+
=
=
+
=
+
jx
jx
e
cos x
j sin x
e
cos x
j sin x
−
=
+
=
−
(
)
1
2
jx
jx
cos x
e
e
−
=
+
9
Automatyka i sterowanie19 Powtórzenie
Transmitancja widmowa:
j ( )
G( j ) G( j ) e
P( ) jQ( )
ϕ ω
ω
ω
ω
ω
=
=
+
2
2
Q( )
A( )
P ( ) Q ( ),
( ) arctg
P( )
ω
ω
ω
ω
φ ω
ω
=
+
=
m
m
Y ( )
A( )
U ( )
ω
ω
ω
=
Transmitancja widmowa UKŁADU DYSKRETNEGO
)
sin(
)
(
t
U
t
u
ω
=
T
Ue
Ue
kT
U
i
jk
kT
j
i
ω
ω
ω
ω
=
=
=
)
(
~
i
j
e
z
z
U
z
G
z
U
z
G
z
Y
ω
−
=
=
)
(
)
(
~
)
(
)
(
~
ustalona część odpowiedzi:
i
i
i
i
j
jk
j
k
j
e
z
ust
Ue
e
G
z
e
z
z
U
z
G
s
kT
y
ω
ω
ω
ω
)
(
)
(
Re
)
(
~
1
=
⎭
⎬
⎫
⎩
⎨
⎧
−
=
−
=
)
(
)
(
i
i
j
j
e
z
e
G
z
G
ω
ω
=
=
- transmitancja widmowa
)
(
i
j
G
ω
)
(
)
(
)
(
i
i
i
jQ
P
j
G
ω
ω
ω
+
=
,
)
(
)
(
i
i
P
P
ω
ω
=
−
)
(
)
(
i
i
Q
Q
ω
ω
−
=
−
10
Automatyka i sterowanie19 Powtórzenie
4. Wyznaczanie opisu w przestrzeni stanów z transmitancji (I wariant metody bezpośredniej).
(I wariant metody bezpośredniej)
1
0
1
1
1
n
n
n
n
n
n
Y ( s )
b s
b s
b
G( s )
U( s )
s
a s
a
−
−
+
+ +
=
=
+
+ +
=
1
2
1
2
0
1
1
n
n
n
n
n
n
b s
b s
b
b
s
a s
a
−
−
−
+
+ +
+
+
+ +
0
0
1
2
2
0
1
1
1
~
~
,
,
~
~
,
~
~
b
a
b
b
b
a
b
b
b
a
b
b
n
n
n
−
=
−
=
−
=
1
2
1
2
0
1
1
1
n
n
n
n
b s
b z
b s
G( s ) b
a s
a s
−
−
−
−
−
+
+ +
=
+
+
+ +
(
)
1
2
0
1
2
1
1
1
n
n
n
n
U( s )
Y ( s ) b U( s )
b s
b s
b s
a s
a s
−
−
−
−
−
=
+
+
+ +
+
+ +
1
1
1
n
n
U( s )
E( s )
a s
a s
−
−
=
+
+
+
11
Automatyka i sterowanie19 Powtórzenie
(
)
1
2
1
2
n
n
E( s ) U( s )
a s
a s
a s
E( s )
−
−
−
=
−
+
+ +
1
n
X ( s ) s E( s )
−
=
1
1
2
1
1
n
n
n
X ( s ) sX ( s ) s
E( s ), ,X ( s ) sX ( s ) s E( s )
− +
−
−
=
=
=
=
wtedy:
1
1
1
1
1
1
0
1
0
0
0
0
1
0
1
n
n
n
n
n
n
x ( t )
x ( t )
u( t )
x ( t )
x ( t )
x ( t )
a
a
a
x ( t )
−
−
−
⎡
⎤ ⎡
⎤ ⎡
⎤ ⎡ ⎤
⎢
⎥ ⎢
⎥ ⎢
⎥ ⎢ ⎥
⎢
⎥ ⎢
⎥ ⎢
⎥ ⎢ ⎥
=
+
⎢
⎥ ⎢
⎥ ⎢
⎥ ⎢ ⎥
⎢
⎥ ⎢
⎥ ⎢
⎥ ⎢ ⎥
−
−
−
⎣ ⎦
⎣
⎦ ⎣
⎦ ⎣
⎦
12
Automatyka i sterowanie19 Powtórzenie
[
]
1
1
1
0
1
n
n
n
n
x ( t )
y( t )
b
b
b
b u( t )
x ( t )
x ( t )
−
−
⎡
⎤
⎢
⎥
⎢
⎥
=
+
⎢
⎥
⎢
⎥
⎣
⎦
Wyznaczanie opisu w przestrzeni stanów – UKŁAD DYSKRETNY
(I wariant metody bezpośredniej)
n
n
n
n
n
n
a
z
a
z
b
z
b
z
b
z
U
z
Y
z
G
+
+
+
+
+
+
=
=
−
−
1
1
1
1
0
~
~
~
)
(
)
(
)
(
=
n
n
n
n
n
n
a
z
a
z
b
z
b
z
b
b
+
+
+
+
+
+
+
−
−
−
1
1
2
2
1
1
0
~
0
0
1
2
2
0
1
1
1
~
~
,
,
~
~
,
~
~
b
a
b
b
b
a
b
b
b
a
b
b
n
n
n
−
=
−
=
−
=
n
n
n
n
z
a
z
a
z
b
z
b
z
b
b
z
G
−
−
−
−
−
+
+
+
+
+
+
+
=
1
1
2
2
1
1
0
1
~
)
(
13
Automatyka i sterowanie19 Powtórzenie
(
)
n
n
n
n
z
a
z
a
z
U
z
b
z
b
z
b
z
U
b
z
Y
−
−
−
−
−
+
+
+
+
+
+
+
=
1
1
2
2
1
1
0
1
)
(
)
(
~
)
(
n
n
z
a
z
a
z
U
z
E
−
−
+
+
+
=
1
1
1
)
(
)
(
(
)
)
(
)
(
)
(
2
2
1
1
z
E
z
a
z
a
z
a
z
U
z
E
n
n
−
−
−
+
+
+
−
=
)
(
)
(
1
z
E
z
z
X
n
−
=
)
(
)
(
)
(
,
),
(
)
(
)
(
1
1
1
1
2
z
E
z
z
zX
z
X
z
E
z
z
zX
z
X
n
n
n
−
−
+
−
=
=
=
=
wtedy:
)
(
1
0
0
)
(
)
(
)
(
1
0
0
0
1
0
)
)
1
((
)
)
1
((
)
)
1
((
1
1
1
1
1
1
kT
u
kT
x
kT
x
kT
x
a
a
a
T
k
x
T
k
x
T
k
x
n
n
n
n
n
n
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎣
⎡
+
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎣
⎡
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎣
⎡
−
−
−
=
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎣
⎡
+
+
+
−
−
−
14
Automatyka i sterowanie19 Powtórzenie
[
]
)
(
~
)
(
)
(
)
(
)
(
0
1
1
1
1
kT
u
b
kT
x
kT
x
kT
x
b
b
b
kT
y
n
n
n
n
+
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎣
⎡
=
−
−
15
Automatyka i sterowanie19 Powtórzenie
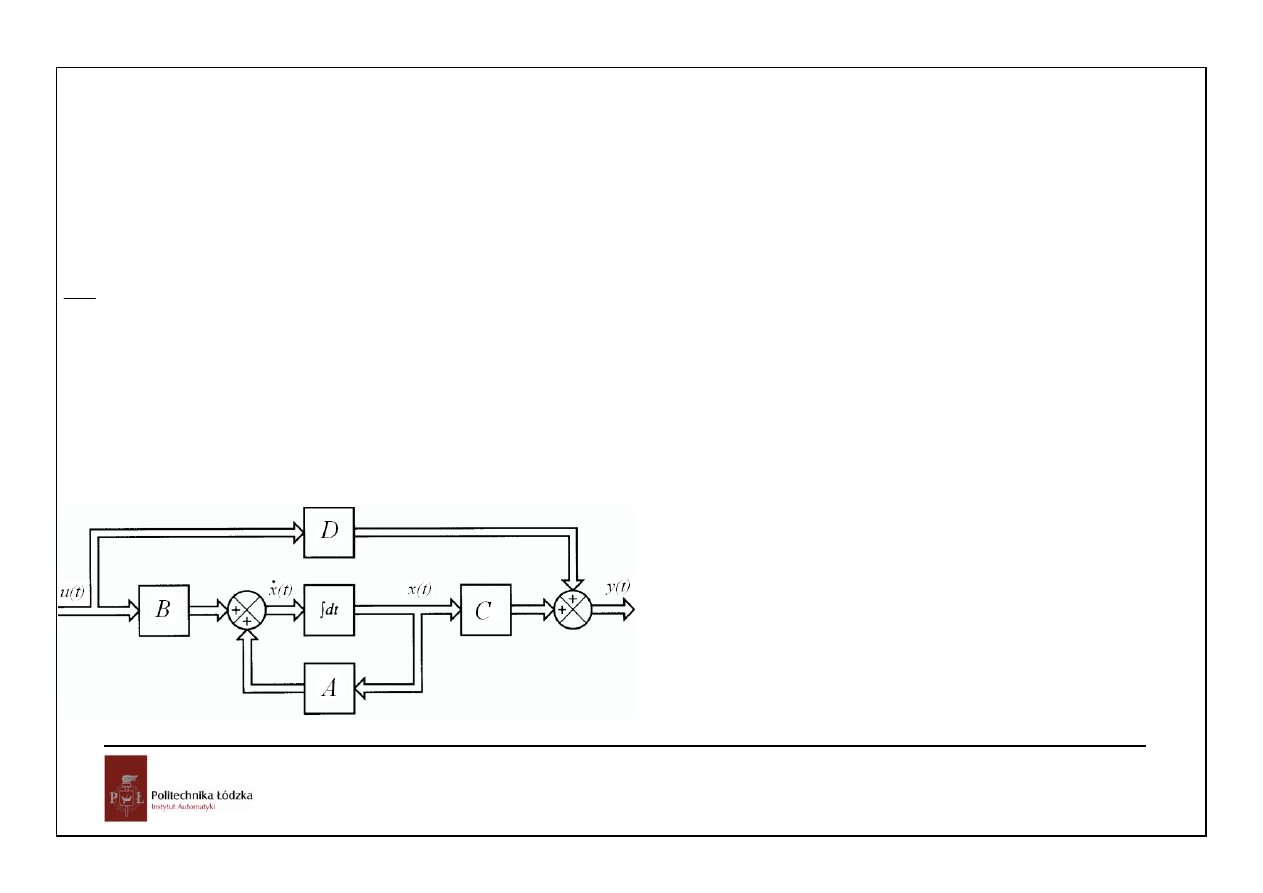
5. Operatorowe i czasowe rozwiązanie równania stanu.
równanie stanu
d
x( t ) Ax( t ) Bu( t )
dt
y( t ) Cx
równ
(
a
t )
ni
Du(
e wy ś
t )
j cia
=
+
=
+
x(t) – wektor zmiennych stanu o wymiarze nx1,
u(t) – wektor wejść/sterowań o wymiarze rx1
y(t) – wektor wyjść o wymiarze mx1
z warunkiem początkowym x(0)=x
0
lub bardziej ogólnie x(t
0
)=x
0
16
Automatyka i sterowanie19 Powtórzenie
Do rozwiązania równania stanu użyjemy transformaty Laplace’a:
(
)
(
)
(
)
0
0
1
1
0
sX ( s ) x
AX ( s ) BU( s )
sI
A X ( s ) x
BU( s )
X ( s )
sI
A
x
sI
A
BU( s )
−
−
−
=
+
−
=
+
=
−
+
−
Macierz (sI-A)
-1
jest nazywana rezolwentą macierzy A, a jej oryginał
(
)
{
}
(
)
(
)
1
1
1
adj sI
A
( t ) L
sI
A
L
det sI
A
−
−
−
⎧
⎫
−
⎪
⎪
Φ
=
−
=
⎨
⎬
−
⎪
⎪
⎩
⎭
macierzą fundamentalną albo tranzycyjną równania
d
x( t ) Ax( t )
dt
=
. Rozwiązaniem tego równania z warunkiem
początkowym x(0)=x
0
będzie
(
)
1
0
X ( s )
sI A
x
−
=
−
czyli
0
x( t )
( t )x
= Φ
17
Automatyka i sterowanie19 Powtórzenie
a rozwiązaniem równania
d
x( t ) Ax( t ) Bu( t )
dt
=
+
z warunkiem początkowym x(0)=x
0
będzie
(
)
(
)
1
1
0
X ( s )
sI
A
x
sI
A
BU( s )
−
−
=
−
+
−
, czyli
0
0
t
x( t )
( t )x
( t
)Bu( )d
τ
τ τ
= Φ
+ Φ −
∫
Jeżeli warunek początkowy jest dany w x(t
0
)=x
0
to dla t>t
0
0
0
0
t
t
x( t )
( t t )x
( t
)Bu( )d
τ
τ τ
= Φ −
+ Φ −
∫
Opis
układów dyskretnych w przestrzeni stanów
)
(
)
(
)
(
)
(
)
(
)
)
1
((
kT
Du
kT
Cx
kT
y
kT
Bu
kT
Ax
T
k
x
+
=
+
=
+
splot
18
Automatyka i sterowanie19 Powtórzenie
Rozwiązanie:
)
(
)
(
)
)
1
((
kT
Bu
kT
Ax
T
k
x
+
=
+
)
0
(
)
0
(
)
(
Bu
Ax
T
x
+
=
)
(
)
(
)
2
(
T
Bu
T
Ax
T
x
+
=
=
)
(
)
0
(
)
0
(
2
T
Bu
ABu
x
A
+
+
)
3
(
)
2
(
)
3
(
T
Bu
T
Ax
T
x
+
=
=
)
2
(
)
(
)
0
(
)
0
(
2
3
T
Bu
T
ABu
Bu
A
x
A
+
+
+
1
z
u(kT
x(kT)
y(kT)
x((k+1)T)
19
Automatyka i sterowanie19 Powtórzenie
.....................................................................
)
(
)
0
(
)
(
1
0
1
i
Bu
A
x
A
kT
x
k
i
i
k
k
∑
−
=
−
−
+
=
=
)
)
((
)
0
(
1
1
T
i
k
Bu
A
x
A
k
i
i
k
−
+
∑
=
−
Operatorowo
)
(
)
(
)
0
(
)
(
z
Bu
z
AX
zx
z
zX
+
=
−
(
) (
)
)
(
)
0
(
)
(
1
z
Bu
zx
A
zI
z
X
+
−
=
−
(
)
{
}
1
1
−
−
−
=
A
zI
z
Z
A
k
macierz tranzycyjna
(
)
{
}
1
1
1
−
−
−
−
=
A
zI
Z
A
k
20
Automatyka i sterowanie19 Powtórzenie
6.
Sposób
wyznaczania
e
At
oraz A
k
7. Postać modalna rozwiązania równania stanu.
2 2
3 3
0
2
3
i i
i
A t
A t
A t
( t ) I
At
!
!
i!
∞
=
Φ
= +
+
+
+
=
∑
przez podobieństwo z
2 2
3 3
0
1
2
3
at
i i
i
a t
a t
a t
e
at
!
!
i!
∞
=
= +
+
+
+
=
∑
oznaczamy
At
( t ) e
Φ
=
[
] [
]
1
2
2
1
1
1
2
1
0
0
0
0
0
0
n
n
n
s
s
s
S
S
A
v
v
v
v
v
v
V V
V
V
V
,
V
A
S
A
A
−
−
⎡
⎤
⎢
⎥
⎢
⎥
⎢
⎥
⎢
⎦
=
=
=
⎥
⎣
=
21
Automatyka i sterowanie19 Powtórzenie
Rozpatrzmy równanie
d
x( t ) Ax( t )
dt
=
i zastosujmy przekształcenie zmiennych stanu:
Vz( t ) x( t )
=
1
1
0
0
0
0
d
V
z( t ) AVz( t ), z( ) V x( ) V x
z
dt
−
−
=
=
=
=
1
1
1
0
0
0
0
d
z( t ) V AVz( t ), z( ) V x( ) V x
z
dt
−
−
−
=
=
=
=
1
2
1
1
0
0
0
0
0
0
0
0
0
0
n
s
s
d
z( z )
z( t ), z( ) V x( ) V x
z
dt
s
−
−
⎡
⎤
⎢
⎥
⎢
⎥
=
=
=
=
⎢
⎥
⎢
⎥
⎣
⎦
22
Automatyka i sterowanie19 Powtórzenie
0
0
1 2
i
i i
i
i
d
z ( t ) s z ( t ), z ( ) z
i
, ,...,n
dt
=
=
=
0
1 2
i
s t
i
i
z ( t ) e z
i
, ,...,n
=
=
1
2
0
0
0
0
0
0
0
n
s t
s t
s t
e
e
z( t )
z( ),
e
⎡
⎤
⎢
⎥
⎢
⎥
=
⎢
⎥
⎢
⎥
⎣
⎦
23
Automatyka i sterowanie19 Powtórzenie
1
2
0
0
0
0
0
0
0
n
s t
s t
s t
e
e
Vz( t ) V
z( ),
e
⎡
⎤
⎢
⎥
⎢
⎥
=
⎢
⎥
⎢
⎥
⎣
⎦
1
2
1
0
0
0
0
0
0
0
n
s t
s t
s t
e
e
x( t ) V
V x( ),
e
−
⎡
⎤
⎢
⎥
⎢
⎥
=
⎢
⎥
⎢
⎥
⎣
⎦
1
1
2
T
T
T
n
w
w
V :
w
−
⎡
⎤
⎢
⎥
⎢
⎥
=
⎢
⎥
⎢
⎥
⎣
⎦
24
Automatyka i sterowanie19 Powtórzenie
1
0
i
n
s t
T
i
i
i
x( t )
e v w x( ),
=
=
∑
0
x( t )
( t )x
= Φ
czyli
1
2
1
0
0
0
0
0
0
n
s t
s t
s t
e
e
( t ) V
V
e
−
⎡
⎤
⎢
⎥
⎢
⎥
Φ
=
⎢
⎥
⎢
⎥
⎣
⎦
1
i
n
s t
T
i
i
i
( t )
e v w
=
Φ
=
∑
0
0
t
x( t )
( t )x
( t
)Bu( )d
τ
τ τ
= Φ
+ Φ −
∫
25
Automatyka i sterowanie19 Powtórzenie
( )
0
1
1
0
0
1
0
i
i
i
i
t
n
n
s t
s t
T
T
i
i
i
i
i
i
t
n
s t
s
T
i
i
i
x( t )
e v w x
e
v w Bu( )d
e v w x
e
Bu( )d
τ
τ
τ τ
τ τ
−
=
=
−
=
=
+
=
⎡
⎤
=
+
⎢
⎥
⎣
⎦
∑
∑
∫
∑
∫
UKŁAD DYSKRETNY
Postać modalna rozwiązania:
A ma n różnych wartości własnych z
i
Macierzą przekształcenia przez podobieństwo do postaci diagonalnej jest macierz, której kolumnami są wektory własne:
[
]
n
v
v
v
V
2
1
=
,
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎣
⎡
=
n
z
z
z
0
0
0
0
0
0
2
1
Λ
26
Automatyka i sterowanie19 Powtórzenie
i
i
i
v
z
v
A
=
i=1,...., n
Λ
V
AV
=
1
−
=
V
V
A
Λ
Λ
=
−
AV
V
1
1
2
1
1
2
−
−
−
=
=
V
V
V
V
V
V
A
Λ
Λ
Λ
1
3
1
1
2
3
−
−
−
=
=
V
V
V
V
V
V
A
Λ
Λ
Λ
.........................
1
−
=
V
V
A
k
k
Λ
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎣
⎡
=
k
n
k
k
k
z
z
z
0
0
0
0
0
0
2
1
Λ
,
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎣
⎡
=
=
−
T
n
T
T
w
w
w
W
V
2
1
1
:
1
−
=
V
V
A
k
k
Λ
=
( )
T
j
j
n
j
k
j
w
v
z
∑
=1
27
Automatyka i sterowanie19 Powtórzenie
)
(kT
x
=
)
)
((
)
0
(
0
1
T
i
k
Bu
A
x
A
k
i
i
k
−
+
∑
=
−
==
( )
)
0
(
1
x
w
v
z
T
j
j
n
j
k
j
∑
=
( )
)
)
((
1
0
1
T
i
k
Bu
w
v
z
k
i
T
j
j
n
j
i
j
−
+
∑∑
=
=
−
=
( )
)
0
(
1
x
w
v
z
T
i
i
n
i
k
i
∑
=
( )
)
)
((
1
0
1
T
i
k
Bu
z
w
v
i
j
k
i
n
j
T
j
j
−
+
−
=
=
∑
∑
28
Automatyka i sterowanie19 Powtórzenie
8. Wyznaczenie transmitancji z równań stanu.
Opis w przestrzeni stanu a transmitancja
Opis układu w postaci:
równanie stanu
d
x( t ) Ax( t ) Bu( t )
dt
y( t ) Cx
równ
(
a
t )
ni
Du(
e wy ś
t )
j cia
=
+
=
+
x(t) – wektor zmiennych stanu o wymiarze nx1,
u(t) – wektor wejść/sterowań o wymiarze rx1
y(t) – wektor wyjść o wymiarze mx1
Wyznaczymy macierz transmitancji:
(
)
(
)
(
)
0
0
1
1
0
sX ( s ) x
AX ( s ) BU( s )
sI
A X ( s ) x
BU( s )
X ( s )
sI
A
x
sI
A
BU( s )
−
−
−
=
+
−
=
+
=
−
+
−
29
Automatyka i sterowanie19 Powtórzenie
ale przy zerowych warunkach początkowych:
(
)
1
X ( s )
sI
A
BU( s )
−
=
−
(
)
1
Y ( s )
C sI
A
B D U( s ) G( s )U( s )
−
⎡
⎤
=
−
+
=
⎣
⎦
(
)
(
)
(
)
1
adj sI
A
G( s ) C sI
A
B D C
B D
det sI
A
−
−
=
−
+ =
+
−
mogą wystąpić skrócenia – transmitancja może być niższego rzędu niż wymiar wektora stanu!!
UKŁAD DYSKRETNY
Operatorowo
)
(
)
(
)
0
(
)
(
z
Bu
z
AX
zx
z
zX
+
=
−
(
) (
)
)
(
)
0
(
)
(
1
z
Bu
zx
A
zI
z
X
+
−
=
−
(
)
{
}
1
1
−
−
−
=
A
zI
z
Z
A
k
macierz tranzycyjna
(
)
{
}
1
1
1
−
−
−
−
=
A
zI
Z
A
k
30
Automatyka i sterowanie19 Powtórzenie
(
) (
)
)
(
)
(
)
0
(
)
(
)
(
)
(
1
z
Du
z
Bu
zx
A
zI
C
z
Du
z
CX
z
Y
+
+
−
=
+
=
−
(
)
[
]
)
(
)
(
0
)
0
(
1
z
u
D
B
A
zI
C
z
Y
x
+
−
=
⇒
=
−
(
)
D
B
A
zI
C
z
G
+
−
=
−1
)
(
macierz transmitancji dyskretnych
31
Automatyka i sterowanie19 Powtórzenie
9. Liniowe przekształcenie zmiennych stanu, niezmienniczość transmitancji.
Liniowe przekształcenie zmiennych stanu:
Opis układu w postaci:
równanie stanu
d
x( t ) Ax( t ) Bu( t )
dt
y( t ) Cx
równ
(
a
t )
ni
Du(
e wy ś
t )
j cia
=
+
=
+
x(t) – wektor zmiennych stanu o wymiarze nx1,
u(t) – wektor wejść/sterowań o wymiarze rx1
y(t) – wektor wyjść o wymiarze mx1
wprowadzamy nowe zmienne stanu:
0
Pq( t ) x( t ), det P
=
≠
równanie stanu
d
Pq( t ) APq( t ) Bu( t )
nowe
dt
y( t ) CPq( t ) Du( t )
now
równanie wyjś a
e
ci
=
+
=
+
32
Automatyka i sterowanie19 Powtórzenie
1
1
równanie st
d
q( t ) P APq( t ) P Bu( t )
nowe
dt
y( t ) CPq( t ) Du( t )
anu
równanie wyjścia
nowe
−
−
=
+
=
+
1
1
d
q( t ) Aq( t ) Bu( t )
A P AP, B P B
dt
y( t ) Cq( t ) Du( t )
C CP
−
−
=
+
=
=
=
+
=
wartości własne nowej macierzy stanu są takie same jak starej!!
Jaka będzie transmitancja:
33
Automatyka i sterowanie19 Powtórzenie
(
)
(
)
(
)
(
)
(
)
1
1
1
1
1
1
1
1
1
1
1
G( s ) C sI
A
B D CP sI P AP
P B D
CP P
sI
A P
P B D CPP
sI
A
PP B D
C sI
A
B D G( s )
−
−
−
−
−
−
−
−
−
−
−
=
−
+ =
−
+ =
⎡
⎤
=
−
+ =
−
+ =
⎣
⎦
=
−
+ =
liniowe przekształcenie zmiennych stanu nie zmienia transmitancji!!
UKŁAD DYSKRETNY
Liniowe przekształcenie zmiennych stanu:
Opis układu w postaci:
)
(
)
(
)
(
)
(
)
(
)
)
1
((
kT
Du
kT
Cx
kT
y
kT
Bu
kT
Ax
T
k
x
+
=
+
=
+
x(kT) – wektor zmiennych stanu o wymiarze nx1,
u(kT) – wektor wejść/sterowań o wymiarze rx1
bo
(
)
1
1
1
MN
N M
−
−
−
=
34
Automatyka i sterowanie19 Powtórzenie
y(kT) – wektor wyjść o wymiarze mx1
wprowadzamy nowe zmienne stanu:
0
Pq( kT ) x( kT ), det P
=
≠
1
równanie stan
Pq(( k
)T ) APq( kT ) Bu( kT )
nowe
y( kT ) CPq( kT ) Du( kT )
u
równanie wyjści
n we
a
o
+
=
+
=
+
1
1
1
równanie st
q(( k
)T ) P APq( kT ) P Bu( kT )
nowe
y( kT ) CPq( kT ) Du( kT )
nowe
anu
równanie wyjścia
−
−
+
=
+
=
+
1
1
1
q(( k
)T ) Aq( kT ) Bu( kT )
A P AP, B P B
y( kT ) Cq( kT ) Du( kT )
C CP
−
−
+
=
+
=
=
=
+
=
wartości własne nowej macierzy stanu są takie same jak starej!!
35
Automatyka i sterowanie19 Powtórzenie
Jaka będzie transmitancja:
(
)
(
)
(
)
(
)
(
)
1
1
1
1
1
1
1
1
1
1
1
G( z ) C zI
A
B D CP zI P AP
P B D
CP P
zI
A P
P B D CPP
zI
A
PP B D
C zI
A
B D G( z )
−
−
−
−
−
−
−
−
−
−
−
=
−
+ =
−
+ =
⎡
⎤
=
−
+ =
−
+ =
⎣
⎦
=
−
+ =
liniowe przekształcenie zmiennych stanu nie zmienia transmitancji!!
bo
(
)
1
1
1
MN
N M
−
−
−
=
36
Automatyka i sterowanie19 Powtórzenie
10. Definicja i matematyczny warunek stabilności układu liniowego.
Układ nazywamy stabilnym, jeśli składowa przejściowa jego odpowiedzi zanika.
Dla UKŁADU CIĄGŁEGO
Koniecznym i dostatecznym warunkiem stabilności będzie więc zanikanie składowych przejściowych odpowiedzi wszystkich układów
wynikających z rozkładu transmitancji na ułamki proste, czyli składników zawierających funkcje postaci exp(biegun*t) czyli ujemne
bieguny rzeczywiste transmitancji i ujemne części rzeczywiste biegunów zespolonych transmitancji (wszystkie bieguny transmitancji
położone w lewej półpłaszczyźnie płaszczyzny zespolonej). Równoważnie zanikanie wszystkich modów odpowiedzi swobodnej
układu
0
1
i
n
s t
T
i
i
i
x( t )
e v w x
=
=
∑
, czyli wszystkie wartości własne macierzy stanu położone w lewej półpłaszczyźnie
płaszczyzny zespolonej.
Dla UKŁADU DYSKRETNEGO
Koniecznym i dostatecznym warunkiem stabilności będzie więc zanikanie składowych przejściowych odpowiedzi wszystkich
układów wynikających z rozkładu transmitancji dyskretnej na ułamki proste, czyli składników zawierających funkcje postaci
(biegun)
k
czyli bieguny wszystkie bieguny transmitancji położone we wnętrzu koła jednostkowego. Równoważnie zanikanie
wszystkich modów odpowiedzi swobodnej układu
)
(kT
x
=
( )
)
0
(
1
x
w
v
z
T
j
j
n
j
k
j
∑
=
, czyli wszystkie wartości własne macierzy stanu
37
Automatyka i sterowanie19 Powtórzenie
położone we wnętrzu koła jednostkowego.
11.
Uzasadnić sposób obliczania transmitancji dyskretnej układu składającego się z części ciągłej oraz
impulsatora/ekstrapolatora. Uzasadnić sposób wyznaczania równań stanu układu składającego się z części ciągłej oraz
impulsatora/ekstrapolatora.
Jeżeli układ o wejściu u i wyjściu y składa się z impulsatora i części ciągłej o transmitancji G(s), to na wejście G(s) do chwili t trafia
ciąg impulsów Diraca
)
(
)
(
iT
t
iT
u
−
δ
. Żeby obliczyć y(t) trzeba zsumować odpowiedzi impulsowe G(s) na wszystkie impulsy do
chwili t. Tak więc:
g(t)=L
--1
{G(s)}
(
)
∑
=
−
=
k
i
iT
u
T
i
k
g
kT
y
0
)
(
)
(
)
(
jest splotem ciągów u(kT) i g(kT), transformata Z będzie więc iloczynem transformat
{
}
)
(
)
(
)
(
z
U
kT
g
Z
z
Y
=
czyli
{
}
)
(
)
(
kT
g
Z
z
G
=
38
Automatyka i sterowanie19 Powtórzenie
Układ ciągły:
)
(
)
(
)
(
)
(
)
(
)
(
t
u
D
t
x
C
t
y
t
u
B
t
x
A
t
x
dt
d
c
c
c
c
c
c
+
=
+
=
poprzedzony ekstrapolatorem zerowego rzędu (odpowiedniego wymiaru) i impulsatorem:
∫
−
−
+
=
t
t
c
c
t
A
t
t
A
d
u
B
e
t
x
e
t
x
c
c
0
0
)
(
)
(
)
(
)
(
0
)
(
τ
τ
τ
)
(
)
(
,
)
1
(
,
0
kT
u
t
u
T
k
t
kT
t
c
=
+
=
=
∫
−
+
+
=
+
t
t
c
T
k
A
T
A
d
kT
u
B
e
kT
x
e
T
k
x
c
c
0
)
(
)
(
)
)
1
((
)
)
1
((
τ
τ
∫
−
+
+
=
+
t
t
c
T
k
A
T
A
kT
u
B
d
e
kT
x
e
T
k
x
c
c
0
)
(
)
(
)
)
1
((
)
)
1
((
τ
τ
∫
∫
=
=
=
−
+
T
c
A
t
t
c
T
k
A
T
A
B
d
e
B
d
e
B
e
A
c
c
c
0
)
)
1
((
0
,
τ
τ
τ
τ
39
Automatyka i sterowanie19 Powtórzenie
gdy
0
det
≠
c
A
[
]
c
T
A
c
T
c
A
B
I
e
A
B
d
e
B
c
c
−
=
=
−
∫
1
0
τ
τ
0
)
det(
)
det(
)
(
≠
=
=
⇒
=
T
A
tr
T
A
T
A
c
c
c
e
e
A
e
A
40
Automatyka i sterowanie19 Powtórzenie
12.
Uzasadnić jakie będą bieguny/wartości własne macierzy stanu układu dyskretnego składającego się z części ciągłej (w
postaci transmitancji lub równań stanu) oraz impulsatora/ekstrapolatora.
c
A T
d
A
e
=
,
1
2
1
0
0
0
0
0
0
n
s t
s t
At
s t
e
e
e
( t ) V
V
e
−
⎡
⎤
⎢
⎥
⎢
⎥
= Φ
=
⎢
⎥
⎢
⎥
⎣
⎦
,
1
2
1
0
0
0
0
0
0
c
n
s T
s T
A T
s T
e
e
e
V
V
e
−
⎡
⎤
⎢
⎥
⎢
⎥
=
⎢
⎥
⎢
⎥
⎣
⎦
41
Automatyka i sterowanie19 Powtórzenie
13. Definicje i warunki astatyzmu.
Układ astatyczny pierwszego rzędu względem wymuszenia – zerowy uchyb ustalony przy wymuszeniu jednostkowym
0
=
∞
e
)
s
(
M
)
s
(
L
)
s
(
G
0
0
0
=
A
)
s
(
L
)
s
(
M
)
s
(
M
lim
)
s
(
G
A
lim
s
A
)
s
(
sG
lim
)
s
(
sE
lim
)
t
(
e
lim
e
s
s
e
s
s
t
0
0
0
0
0
0
0
0
1
+
=
+
=
=
=
=
=
→
→
→
→
∞
→
∞
[
]
0
0
0
0
0
0
0
s
s
lim M ( s )
, lim M ( s ) L ( s )
→
→
=
+
≠
)
s
(
M
s
)
s
(
M
01
0
⋅
=
czyli transmitancja uchybowa musi mieć zero =0, transmitancja układu otwartego biegun=0
42
Automatyka i sterowanie19 Powtórzenie
)
s
(
M
s
)
s
(
L
)
s
(
L
)
s
(
G
cl
01
0
0
⋅
+
=
w transmitancji uz wyrazy wolne licznika i mianownika musza być równe, czyli
0
1
cl
G ( )
=
UKŁAD DYSKRETNY
Układ otwarty o transmitancji dyskretnej
,
)
(
)
(
)
(
0
0
0
z
M
z
L
z
G
=
sztywne ujemne SZ. Zakładamy, że UZ jest stabilny.
Wymuszenie jednostkowe
1
)
(
−
=
z
z
z
U
.
Uchyb ustalony:
)
(
)
(
1
1
)
1
(
lim
)
(
)
1
(
lim
)
(
lim
0
1
1
z
U
z
G
z
z
e
z
kT
e
e
z
z
k
u
+
−
=
−
=
=
→
→
∞
→
=
1
)
(
)
(
)
(
)
1
(
lim
0
0
0
1
−
+
−
→
z
z
z
M
z
L
z
M
z
z
)
(
)
1
(
)
(
0
)
(
)
(
)
(
lim
01
0
0
0
0
1
z
M
z
z
M
z
M
z
L
z
zM
e
z
u
−
=
⇔
=
+
=
→
- astatyzm pierwszego rzędu względem wymuszenia.
Układ astatyczny rzędu r odtwarza z zerowym dyskretnym uchybem ustalonym wymuszenie postaci
( )
i
r
i
i
kT
A
kT
u
∑
−
=
=
1
0
)
(
. Warunkiem astatyzmu rzędu r jest wystąpienie r-krotnego zera =1 w transmitancji uchybowej,
lub równoważnie r-krotnego bieguna =1 w transmitancji układu otwartego.
43
Automatyka i sterowanie19 Powtórzenie
Transmitancja układu zamkniętego:
)
(
)
1
(
1
)
(
1
)
(
1
z
G
z
z
G
z
G
e
r
e
−
−
=
−
=
1
)
1
(
)
1
1
(
1
)
1
(
1
=
−
−
=
e
r
G
G
{
}
1
1
1
1
1
1
1
1
1
1
0
r
r
r
z
e
z
e
e
z
d
d
d
G( z )
( z
) G ( z )
r( z
) G ( z ) ( z
)
G ( z )
dz
dz
dz
−
=
=
=
⎧
⎫
= −
−
= −
−
+
−
=
⎨
⎬
⎩
⎭
............
0
)
(
1
1
1
=
=
−
−
z
r
r
z
G
dz
d
44
Automatyka i sterowanie19 Powtórzenie
14.
Warunki
występowania przebiegów typu Dead Beat w układzie dyskretnym.
Jeżeli transmitancja układu zamkniętego jest postaci
N
z
L
z
z
L
z
G
N
≤
=
)
(
deg
,
)
(
)
(
, to
)
(
)
(
1
−
=
z
W
z
G
,
jest wielomianem względem z
-1
. Układ realizuje więc opóźnienia sygnału wejściowego (maksymalnie o N okresów
impulsowania). Przebiegi przejściowe zanikają więc po co najwyżej N okresach impulsowania.
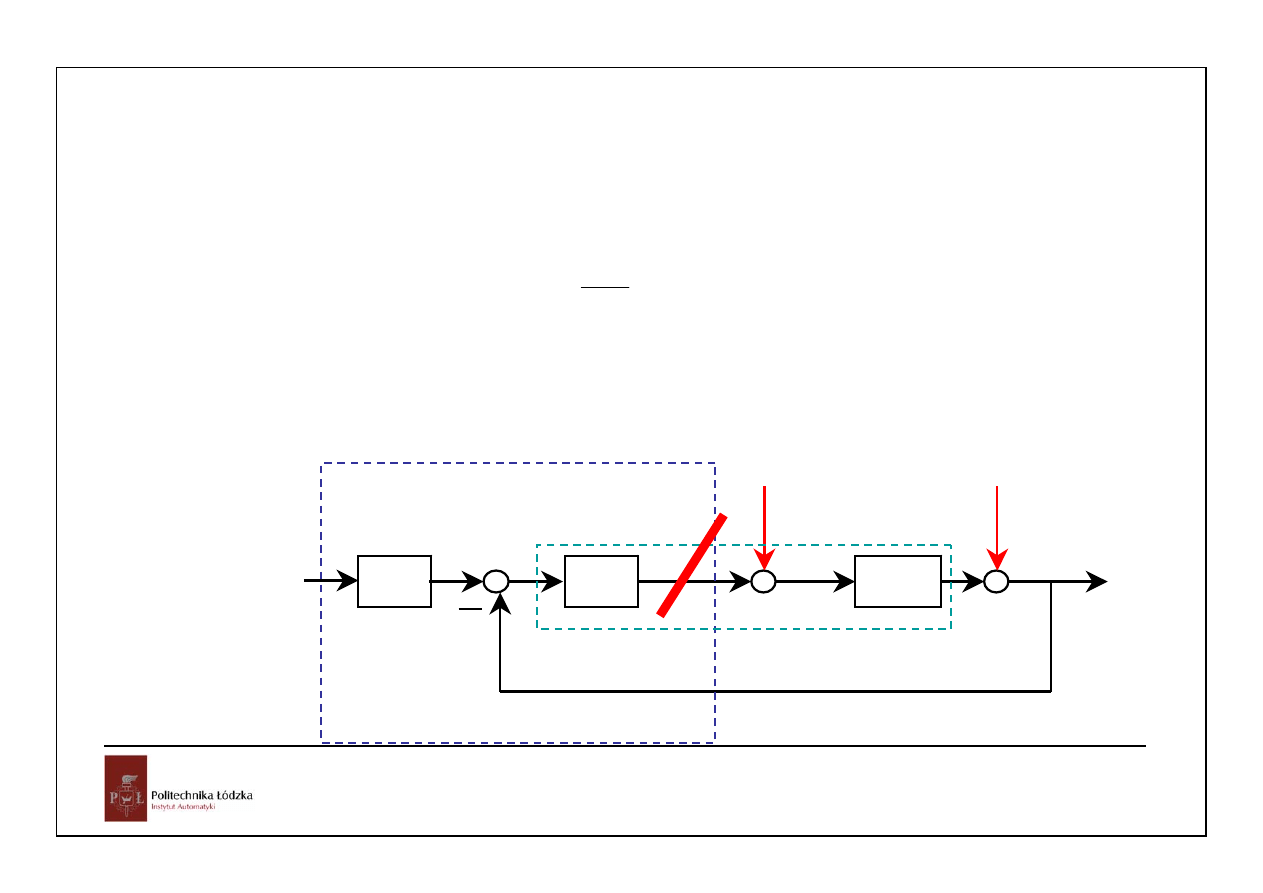
15. Uzasadnić jak wyznaczyć zakres częstotliwości zakłóceń, które będą tłumione/wzmacniane w układzie zamkniętym.
C(s)
P(s)
D(s)
R(s)
Y(s)
E(s)
U(s)
regulator
obiekt
N(s
)
F(s)
v(s)
n(s
)
45
Automatyka i sterowanie19 Powtórzenie
Rozważmy jak zachowa się układ bez sterowania:
0
Y ( s ) N( s ) P( s )D( s )
=
+
i układ zamknięty przy r(t)=0 :
0
1
1
1
1
1
1
1
c
P
Y ( s )
N( s )
D( s )
( N PD )
Y ( s )
PC
PC
PC
PC
=
+
=
+
=
+
+
+
+
czyli zakłócenia o częstotliwościach, dla
których
1
1
1 P( j )C( j )
ω
ω
<
+
, czyli
1
1
P( j )C( j )
ω
ω
+
>
będą tłumione,
a te o
częstotliwościach, dla których czyli
1
1
P( j )C( j )
ω
ω
+
<
wzmacniane:
ω
G
0
(jω)
1+G
0
(jω)
46
Automatyka i sterowanie19 Powtórzenie
Częstotliwości, dla których zakłócenia są tłumione
1+G
0
(jω)
G
0
(jω
47
Automatyka i sterowanie19 Powtórzenie
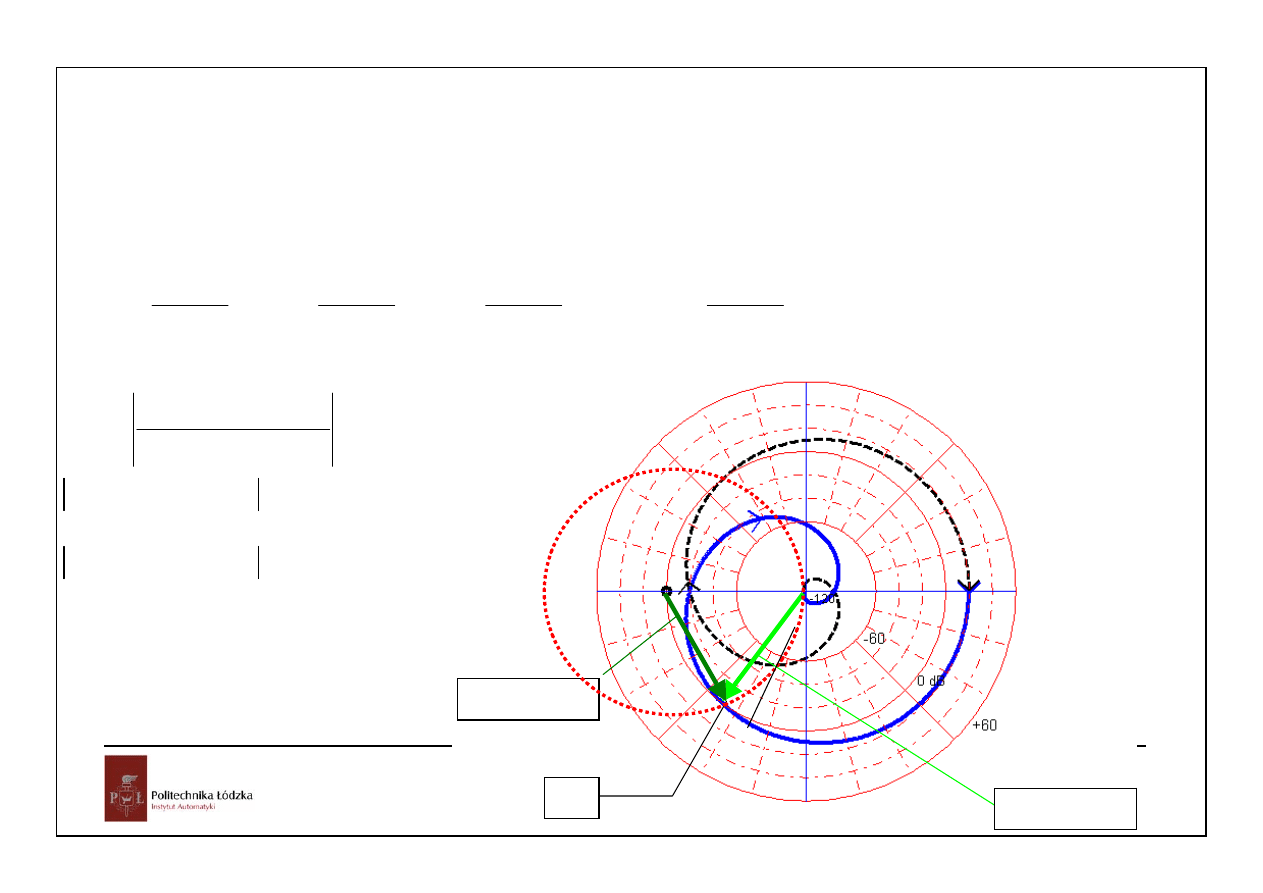
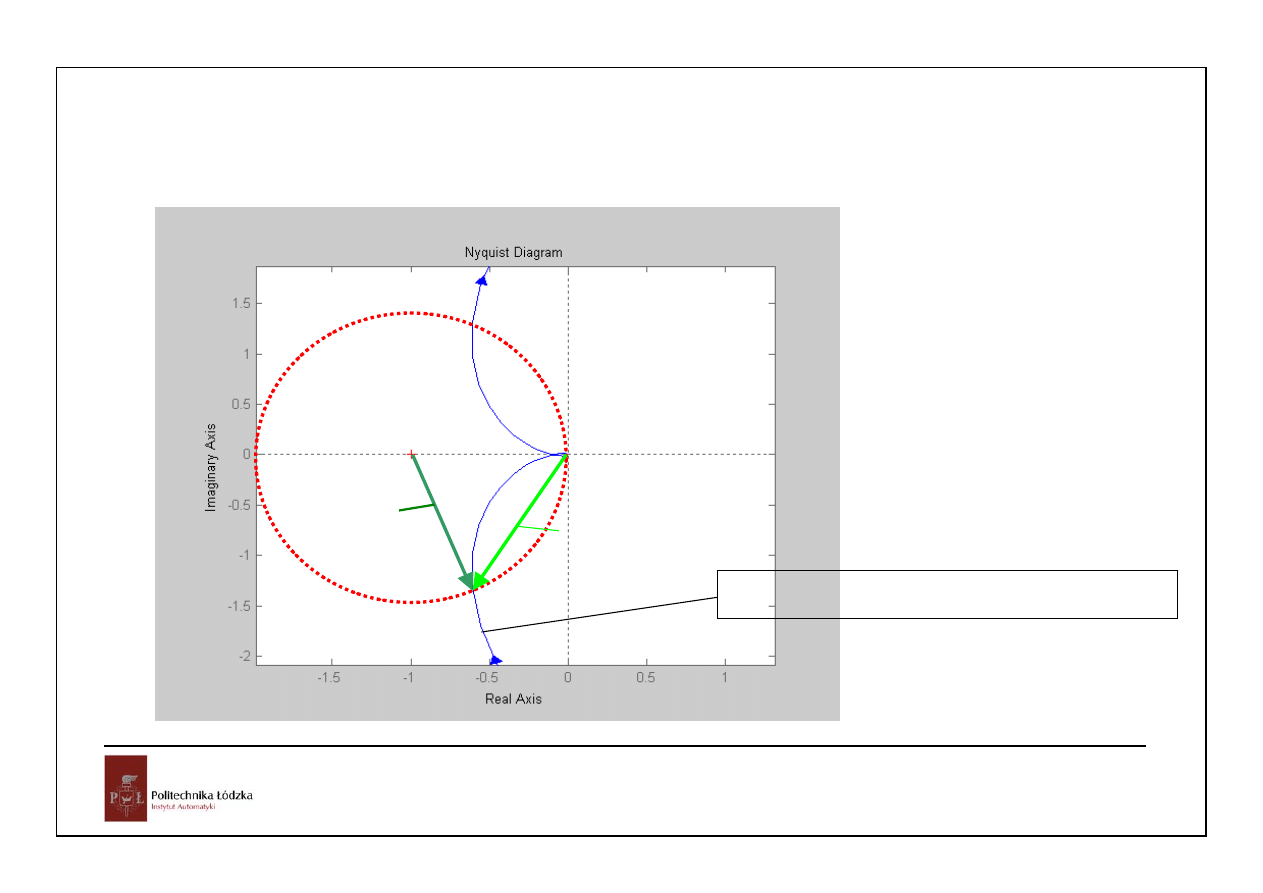
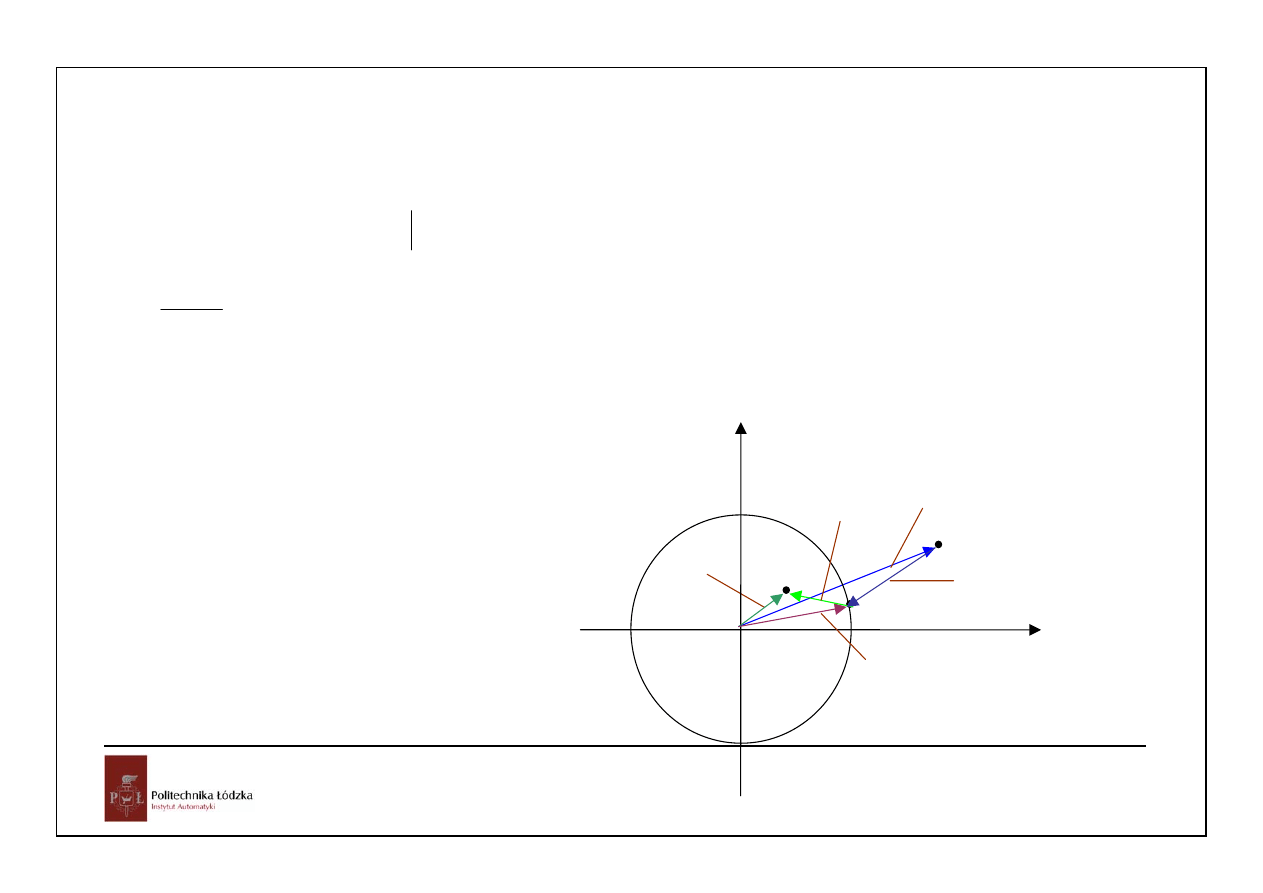
16.
Wyprowadzić kryterium Nyquista dla układów ciągłych i dyskretnych podąć definicje i interpretację zapasów fazy i
modułu.
Kryterium Nyquista
Układ otwarty o transmitancji dyskretnej
0
0
0
01
02
0
0
n
L ( s )
G ( s )
, M ( s ) ( s s )( s s ) ( s s )
M ( s )
=
=
−
−
−
i transmitancji widmowej
0
0
s j
G ( j ) G ( s )
ω
ω
=
=
daje układ zamknięty o transmitancji
0
0
1
2
0
0
n
L ( s )
L ( s )
G( s )
, M ( s ) ( s s )( s s ) ( s s )
L ( s ) M ( s )
M ( s )
=
=
=
−
−
−
+
Tw.
Jeżeli M
0
(s) ma k pierwiastków w prawej i n-k lewej półpłaszczyżnie zmiennej zespolonej (nie ma pierwiastków na
osi liczb urojonych), to M (s) ma n pierwiastków w lewej półpłaszczyźnie wtedy i tylko wtedy gdy:
{
}
0
1
2
arg
G ( j )
k
ω
ω
π
−∞< <∞
Δ
+
=
{
}
0
0
1
i
arg
G ( j )
k
ω
ω
π
< <∞
⇔ Δ
+
=
(charakterystyka a-f
0
0
s j
G ( j ) G ( s )
ω
ω
=
=
obejmuje w kierunku dodatnim punkt (-1, j0) k razy).
48
Automatyka i sterowanie19 Powtórzenie
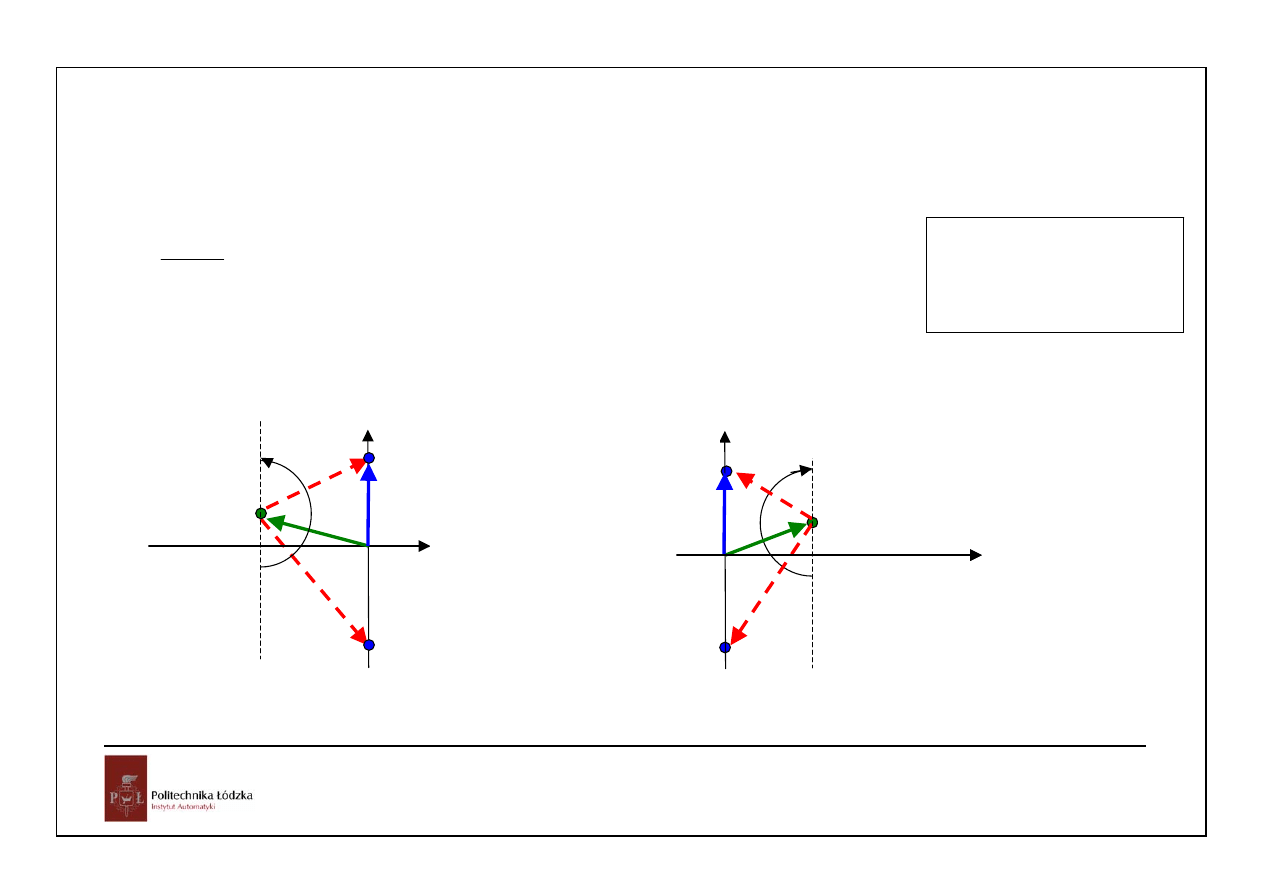
Dow.
1+
0
0
M ( s )
G ( s )
M ( s )
=
{
}
0
1
arg
G ( j )
ω
ω
−∞< <∞
Δ
+
=
{
}
{
}
0
arg M ( j )
arg M ( j )
ω
ω
ω
ω
−∞< <∞
−∞< <∞
Δ
− Δ
=
=
{
}
{
}
0
1
1
n
n
l
l
l
l
arg j
s
arg j
s
ω
ω
ω
ω
−∞< <∞
−∞< <∞
=
=
Δ
−
−
Δ
−
=
∑
∑
[
]
2
n
( n k )
k
k
π
π
π
π
−
−
−
=
{
}
l
arg j
s
ω
ω
π
−∞< <∞
Δ
−
=
{
}
l
arg j
s
ω
ω
π
−∞< <∞
Δ
−
= −
s
l
jω
Re
Im
jω-s
l
TAKŻE DLA
UKŁADÓW Z
OPÓŹNIENIAMI
s
l
jω
Re
Im
jω-s
l
49
Automatyka i sterowanie19 Powtórzenie
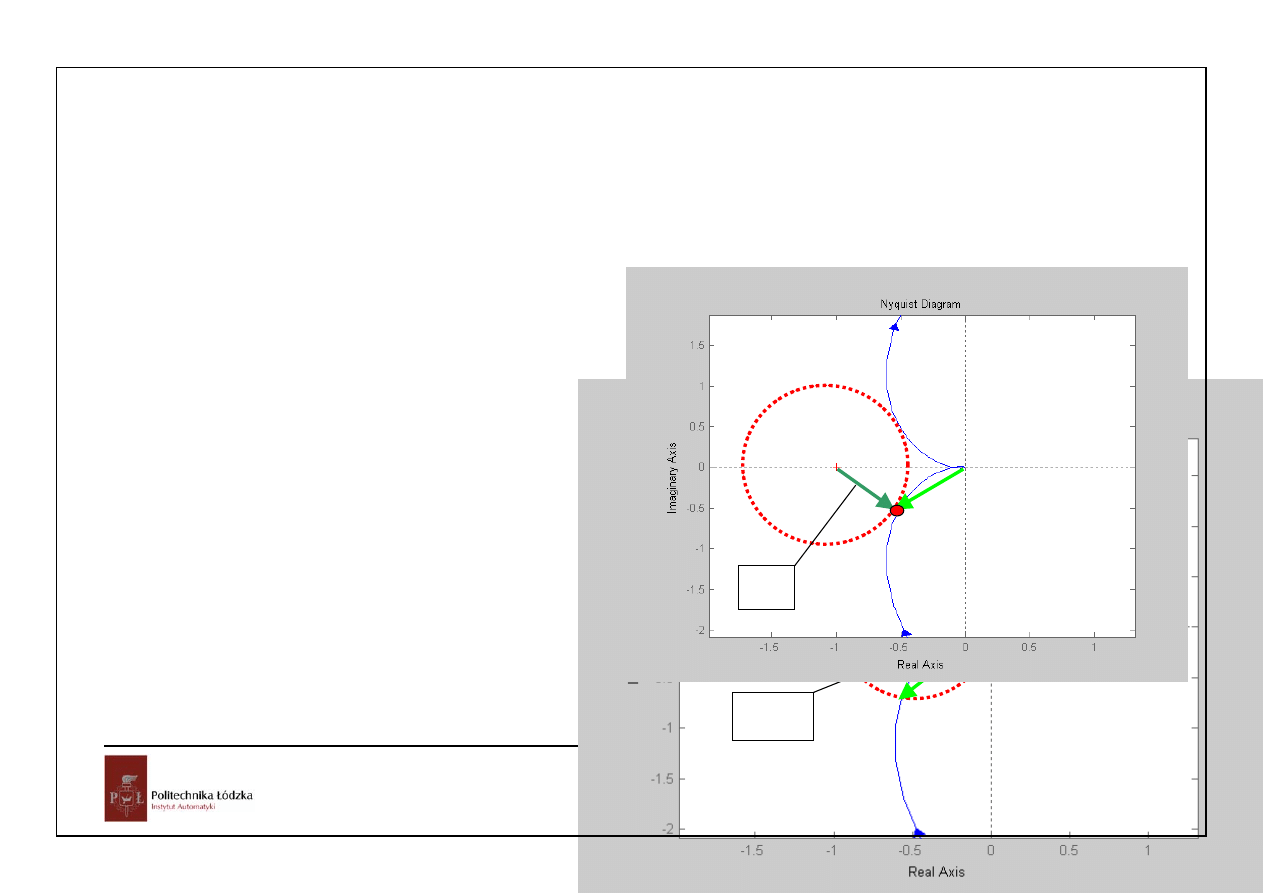
Jeżeli układ jest stabilny, to jak dalece można zmienić jego parametry, żeby stabilny pozostał?
Miary odporności.
Miarą odporności będzie odległość wykresu Nyquista od punktu
krytycznego s
m
. Nazywamy ją zapasem stabilności. Pamiętamy
że:
Maksimum modułu funkcji wrażliwości Ms=max|S(jω)|,
przypadające dla pulsacji ωsc jest miarą maksymalnego
wzmocnienia zakłóceń w układzie, przypada ono dokładnie
dla tej częstotliwości dla której moduł [1+transmitancja
układu otwartego] osiąga minimum s
m
=min|P(jω)C(jω)|,
które za chwilę nazwiemy zapasem stabilności. Mamy Ms =
1/sm
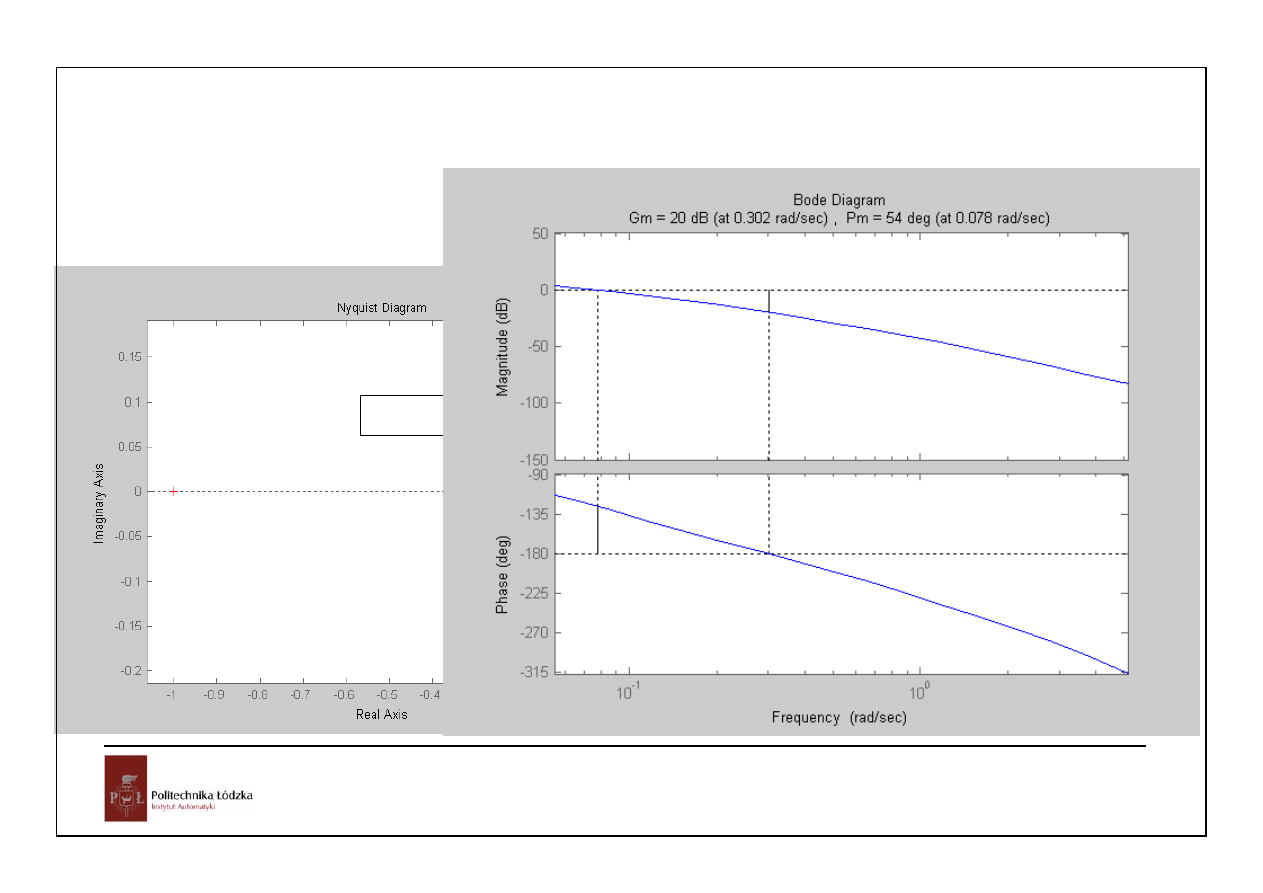
Miarę odporności układu można też wyrazić przez zapas
amplitudy (modułu, wzmocnienia) ΔM i fazy Δφ
wyznaczane w następujący sposób:
Δφ
s
m
50
Automatyka i sterowanie19 Powtórzenie
lub bezpośrednio z wykresu Bodego:
1/ΔM
51
Automatyka i sterowanie19 Powtórzenie
czyli zapas modułu jest czynnikiem przez który można pomnożyć wzmocnienie układu otwartego bez utraty stabilności (odporność na
zmiany wzmocnienia), a zapas fazy wielkością, o którą można zmniejszyć przesuniecie fazowe układu otwartego dla pulsacji, przy
której moduł =1 (odporność na opóźnienia w układzie).
52
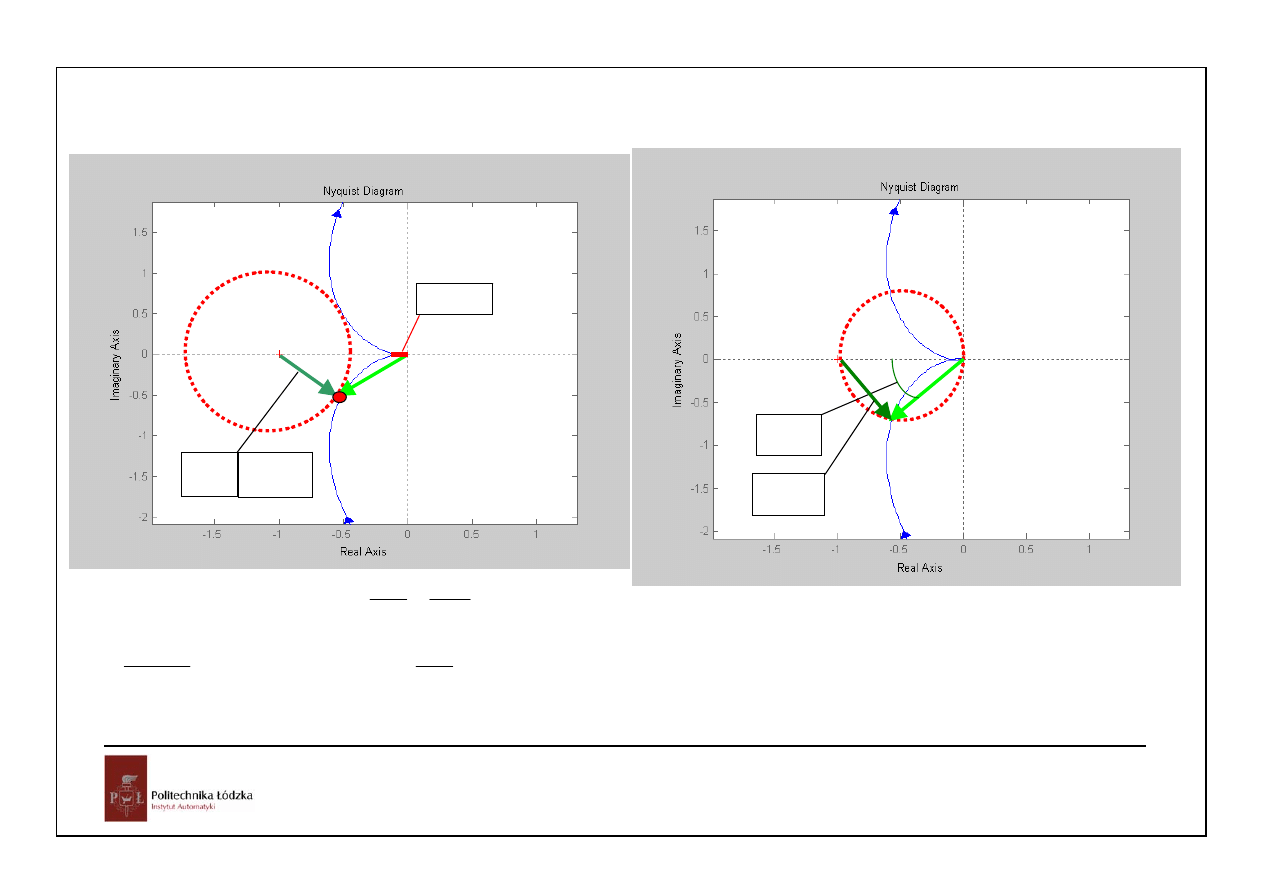
Automatyka i sterowanie19 Powtórzenie
Analiza rysunków pozwala napisać
1
1
1
S
M
M
+
<
Δ
, czyli
1
S
S
M
M
M
Δ >
−
- podobnie
1
S
arcsin
M
ϕ
Δ >
s
m
=1/M
S
1/ΔM
Δφ
1/M
S
53
Automatyka i sterowanie19 Powtórzenie
Stąd:
M
s
= 2 gwarantuje ΔM ≥ 2 i Δφ ≥ 30
o
M
s
= √2 (1.41) gwarantuje ΔM ≥ 3.4 i Δφ ≥ 45
o
M
s
= 2/√3 (1.15) gwarantuje ΔM ≥ 7.5 i Δφ ≥ 60
o
UKŁAD DYSKRETNY
Kryterium Nyquista
Układ otwarty o transmitancji dyskretnej
)
(
)
)(
(
)
(
,
)
(
)
(
)
(
0
02
01
0
0
0
0
n
z
z
z
z
z
z
z
M
z
M
z
L
z
G
−
−
−
=
=
i transmitancji widmowej
0
0
j i
i
i
i
z e
G ( j ) G ( z )
T
ω
ω
ω ω
=
=
=
daje układ zamknięty o transmitancji
)
(
)
)(
(
)
(
,
)
(
)
(
)
(
)
(
)
(
)
(
2
1
0
0
0
0
n
z
z
z
z
z
z
z
M
z
M
z
L
z
M
z
L
z
L
z
G
−
−
−
=
=
+
=
Tw.
Jeżeli M
0
(z) ma k pierwiastków na zewnątrz okręgu jednostkowego i n-k pierwiastków wewnątrz, to M (z) ma n
pierwiastków wewnątrz okręgu jednostkowego wtedy i tylko wtedy gdy:
{
}
π
ω
Δ
π
ω
π
k
j
G
i
i
2
)
(
1
arg
0
=
+
<
<
−
{
}
π
ω
Δ
π
ω
k
j
G
i
i
=
+
⇔
<
<
)
(
1
arg
0
0
54
Automatyka i sterowanie19 Powtórzenie
(charakterystyka a-f
i
j
e
z
i
z
G
j
G
ω
ω
=
=
)
(
)
(
0
0
obejmuje w kierunku dodatnim punkt (-1, j0) k razy).
Dow.
1+
)
(
)
(
)
(
0
0
z
M
z
M
z
G
=
{
}
=
+
<
<
−
)
(
1
arg
0
i
j
G
i
ω
Δ
π
ω
π
{
}
{
}
=
−
<
<
−
<
<
−
)
(
arg
)
(
arg
0
i
i
j
M
j
M
i
i
ω
Δ
ω
Δ
π
ω
π
π
ω
π
=
{
}
{
}
=
−
−
−
<
<
−
=
<
<
−
=
∑
∑
l
j
n
l
l
j
n
l
z
e
z
e
i
i
i
i
0
1
1
arg
arg
ω
π
ω
π
ω
π
ω
π
Δ
Δ
π
π
π
k
k
n
n
2
2
)
(
2
=
−
−
z
1
e
jω
-z
2
z
2
e
jω
i
e
jω
-z
1
Re
Im
55
Automatyka i sterowanie19 Powtórzenie
17.
Właściwości podstawowych regulatorów (odpowiedzi, charakterystyki, wpływ na właściwości układu zamkniętego,
zastosowanie).
Łatwe wykład 6
18. Wymagania stawiane układom regulacji, ich związek z pożądanymi charakterystykami i położeniem biegunów
transmitancji.
Wymagania stawiane układom regulacji
• Zdolność odtwarzania (śledzenia) sygnałów zadających.
• Redukcja oddziaływania zakłóceń (obciążeń).
• Redukcja wpływu zakłóceń (szumów) pomiarowych.
• Mała wrażliwość na zmiany właściwości obiektu.
STABILNOŚĆ
1. Wymagania dotyczące stanu ustalonego
Jakie wymuszenie/zakłócenie rozważamy?
56
Automatyka i sterowanie19 Powtórzenie
Czy dopuszczamy uchyb ustalony, jeśli tak to jaki duży?
2. Wymagania dotyczące stanów dynamicznych.
Jakie sygnały wymuszeń/zakłóceń rozważamy?
Jakiego charakteru odpowiedzi (wyjścia, uchybu) oczekujemy – oscylacyjny/aperiodyczny?
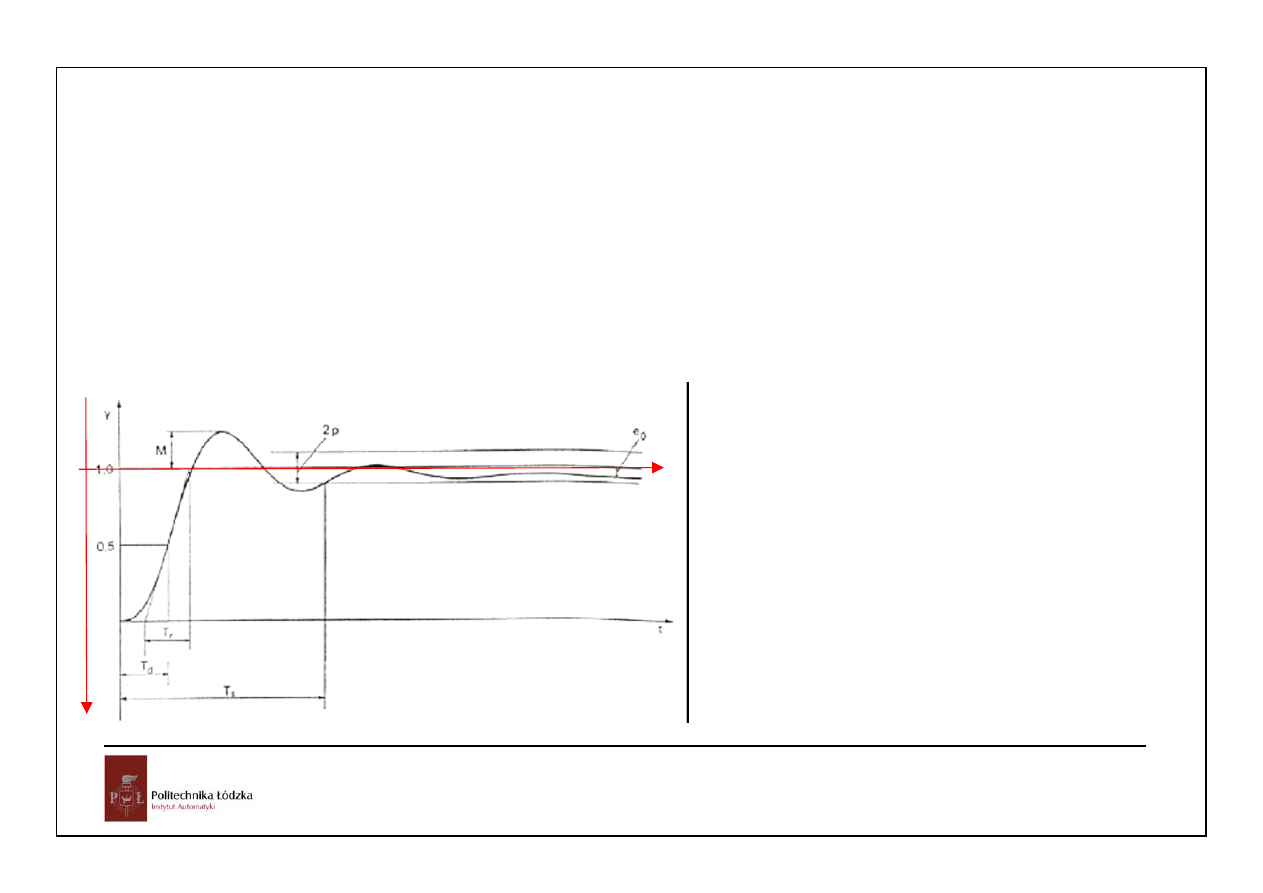
Czy potrafimy podać graniczne parametry odpowiedzi, np.
w odpowiedzi jednostkowej:
• Czas narastania
• Czas regulacji
• Maksymalna wartość pierwszego przeregulowania
• Proporcja pierwszego i drugiego przeregulowania
Jak mierzyć?
Całkowe wskaźniki jakości regulacji
0
e
57
Automatyka i sterowanie19 Powtórzenie
0
0
T
I
e( t ) dt
=
∫
0
0
I
e( t ) dt
∞
=
∫
0
0
T
I
e( t )dt
=
∫
0
0
I
e( t )dt
∞
=
∫
2
2
0
T
I
e( t ) dt
=
∫
2
2
0
I
e( t ) dt
∞
=
∫
0
0
T
t
I
t e( t ) dt
=
∫
0
0
t
I
t e( t ) dt
∞
=
∫
2
2
0
T
t
I
te( t ) dt
=
∫
2
2
0
t
I
te( t ) dt
∞
=
∫
0
T
k
p
pk
I
t e( t ) dt
=
∫
0
k
p
kp
I
t e( t ) dt
∞
=
∫
3. Wymagania dotyczące charakterystyk częstotliwościowych układu zamkniętego. Powinny być nakładane na każdą z sześciu
transmitancji układu.
58
Automatyka i sterowanie19 Powtórzenie
4. Wymagania dotyczące ODPORNOŚCI układu zamkniętego (zmiany parametrów modelu obiektu, niedokładna znajomość
parametrów obiektu, możliwość zmian i ograniczona dokładność nastaw parametrów regulatora)
5. Wymagania specjalne/dodatkowe np. optymalność układu
Dobieramy kompensator/regulator, który zapewni pożądany kształt charakterystyki częstotliwościowej układu otwartego
L( j ) P( j )C( j )
ω
ω
ω
=
.
• Zwykle na wykresach Bodego
• Zaczynamy od charakterystyki obiektu
P( j )
ω
.
• Dobieramy współczynnik wzmocnienia.
• Dodajemy zera i bieguny, żeby otrzymać zadany przebieg charakterystyki.
Zasady:
• Dla małych częstotliwości moduł musi być duży, żeby zapewnić dobre śledzenie wolnych sygnałów zadających.
• Odporność wymaga dostatecznych zapasów modułu i fazy, co kształtuje charakterystykę w okolicy częstotliwości odcięcia.
• Pasmo przenoszenia powinno być dostatecznie duże, częstotliwość odcięcia dostatecznie wysoka (dla uzyskania odpowiedniej
dynamiki układu zamkniętego), nachylenie charakterystyki modułu w okolicy częstotliwości odcięcia dostatecznie duże.
• Dla dużych częstotliwości mały moduł, żeby nie wzmacniać szumów pomiarowych.
• POSZUKUJEMY KOMPROMISU
59
Automatyka i sterowanie19 Powtórzenie
19. Dyskretny regulator PID, związek parametrów z nastawami regulatora ciągłego.
⎥
⎦
⎤
⎢
⎣
⎡
+
+
=
∫
)
t
(
e
dt
d
T
d
)
(
e
T
)
t
(
e
k
)
t
(
u
d
t
i
p
0
1
τ
τ
,
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
+
+
=
d
i
p
sT
sT
k
)
s
(
C
1
1
Algorytm I (pozycyjny)
kwadratura prostokątów – wariant punktu początkowego
0
1
k
p
d
i
i
T
e( kT ) e(( k
)T )
u( kT ) k e( kT )
e( iT ) T
T
T
=
⎛
⎞
−
−
=
+
+
⎜
⎟
⎝
⎠
∑
∑
=
=
k
i
)
iT
(
e
:
)
kT
(
0
α
,
)
kT
(
e
)
T
)
k
((
)
kT
(
=
−
−
1
α
α
)
z
(
e
)
z
(
z
)
z
(
=
−
−
α
α
1
,
)
z
(
e
z
z
)
z
(
1
−
=
α
1
1
1
d
p
i
T z
T z
u( z ) k
e( z )
T z
T
z
⎛
⎞
−
=
+
+
⎜
⎟
−
⎝
⎠
60
Automatyka i sterowanie19 Powtórzenie
Algorytm II (pozycyjny)
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
+
+
=
∫
)
t
(
e
dt
d
T
d
)
(
e
T
)
t
(
e
K
)
t
(
u
d
t
i 0
1
τ
τ
kwadratura trapezów
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
−
−
+
+
−
+
=
∑
=
T
)
T
)
k
((
e
)
kT
(
e
T
)
iT
(
e
)
T
)
i
((
e
T
T
)
kT
(
e
K
)
kT
(
u
d
k
i
i
1
2
1
1
∑
=
+
−
=
k
i
)
iT
(
e
)
T
)
i
((
e
:
)
kT
(
g
1
2
1
,
0
0
=
)
(
g
0
0
2
1
=
+
−
=
)
(
f
,
)
iT
(
e
)
T
)
i
((
e
:
)
iT
(
f
)
z
(
e
z
z
)
z
(
e
)
z
(
e
z
)
z
(
f
1
2
1
+
=
+
=
−
∑
=
=
k
i
)
iT
(
f
)
kT
(
g
1
61
Automatyka i sterowanie19 Powtórzenie
)
kT
(
f
)
T
)
k
((
g
)
kT
(
g
=
−
−
1
)
z
(
f
)
z
(
g
z
)
z
(
g
=
−
−1
)
z
(
e
)
z
(
z
)
z
(
f
z
z
)
z
(
g
1
2
1
1
−
+
=
−
=
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
−
−
+
+
=
T
)
T
)
k
((
e
)
kT
(
e
T
)
kT
(
g
T
T
)
kT
(
e
K
)
kT
(
u
d
i
1
)
z
(
e
z
z
T
T
z
z
T
T
K
)
z
(
u
d
i
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
−
+
−
+
+
=
1
1
1
2
1
,
1
2
1
1
1
−
+
−
=
−
+
z
z
z
z
)
z
(
e
z
z
T
T
z
z
T
T
T
T
K
)
z
(
u
d
i
i
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
−
+
−
+
−
=
1
1
2
1
Algorytm III (prędkościowy):
62
Automatyka i sterowanie19 Powtórzenie
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
+
+
=
∫
)
t
(
e
dt
d
T
d
)
(
e
T
)
t
(
e
K
)
t
(
u
d
t
i 0
1
τ
τ
(
)
1
1
2
1
2
d
i
T
T
u( kT ) u( kT ) u(( k
)T ) K e( kT ) e(( k
)T )
e( kT )
e( kT )
e(( k
)T ) e(( k
)T )
T
T
⎛
⎞
∇
=
−
−
=
−
−
+
+
−
−
+
−
⎜
⎟
⎝
⎠
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
+
−
⎟
⎠
⎞
⎜
⎝
⎛
−
−
+
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
+
+
=
)
T
)
k
((
e
T
T
)
T
)
k
((
e
T
T
)
kT
(
e
T
T
T
T
K
d
d
d
i
2
1
2
1
1
(
)
)
T
)
k
((
e
Q
)
T
)
k
((
e
Q
)
kT
(
e
Q
K
2
1
3
2
1
−
+
−
+
=
=
−
−
)
z
(
u
)
z
(
1
1
(
)
)
z
(
e
Q
z
Q
z
Q
K
3
2
2
1
1
−
−
+
+
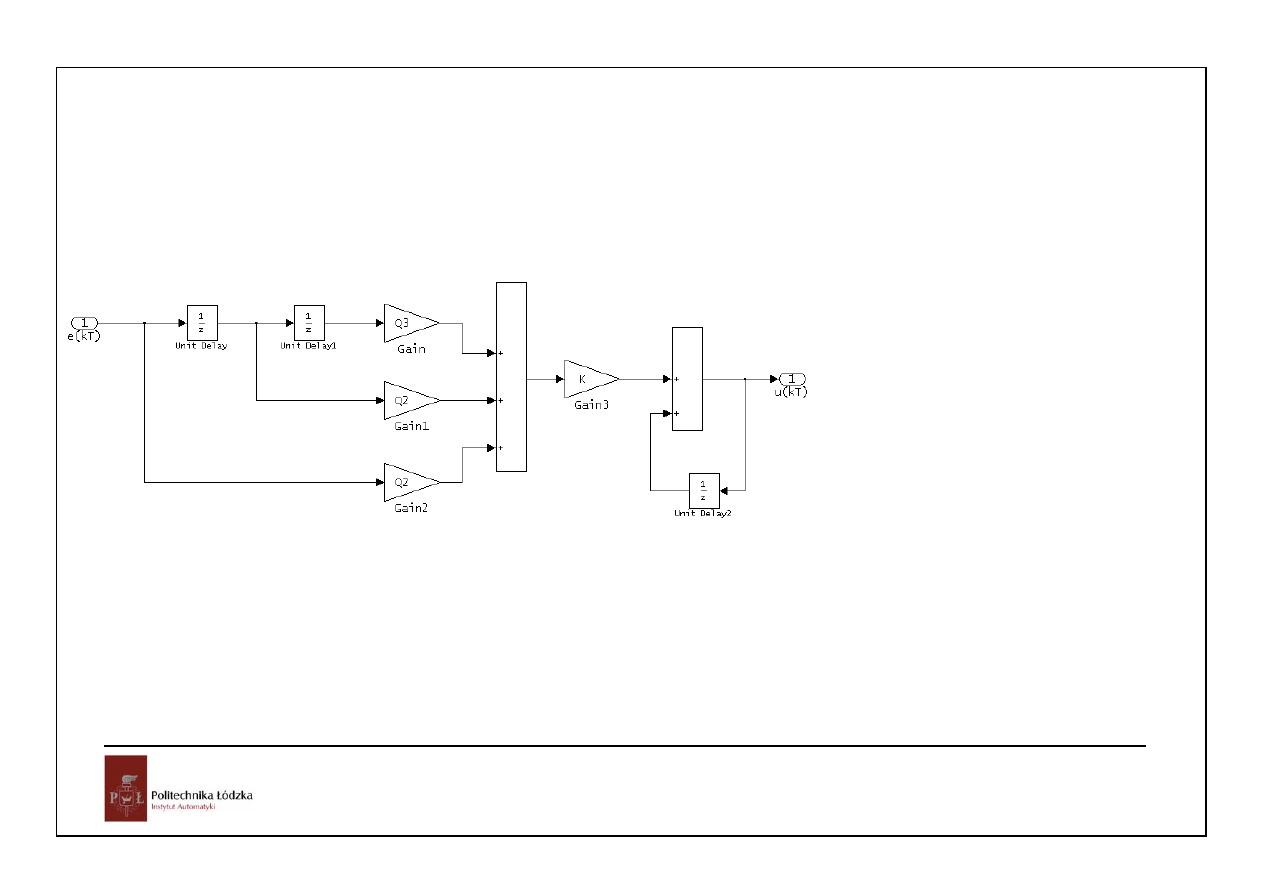
63
Automatyka i sterowanie19 Powtórzenie
64
Automatyka i sterowanie19 Powtórzenie
20. Definicja stanów sterowalnych/obserwowalnych. Warunki sterowalności/obserwowalności, wpływ liniowego
przekształcenia zmiennych stanu na sterowalność/obserwowalność, postać kanoniczna Kalmana, transmitancja układów
niecałkowicie sterowalnych/obserwowalnych. Dualność sterowalnosci i obserwowalności.
Rozważać będziemy opis układu w postaci:
równanie stanu
d
x( t ) Ax( t ) Bu( t )
dt
y( t ) Cx
równ
(
a
t )
ni
Du(
e wy ś
t )
j cia
=
+
=
+
x(t) – wektor zmiennych stanu o wymiarze nx1,
u(t) – wektor wejść/sterowań o wymiarze rx1
y(t) – wektor wyjść o wymiarze mx1
z warunkiem początkowym x(0)=x
0
lub bardziej ogólnie x(t
0
)=x
0
0
0
0
t
t
x( t )
( t t )x
( t
)Bu( )d
τ
τ τ
= Φ −
+ Φ −
∫
65
Automatyka i sterowanie19 Powtórzenie
Def.: Stan x
0
nazywać będziemy sterowalnym, jeżeli istnieje ograniczone sterowanie przeprowadzające układ z x
0
sprowadzające
wektor stanu układu z punktu x
0
do 0 w skończonym czasie. Zbiór wszystkich stanów sterowalnych oznaczymy przez
S
.
T1. Zbiór stanów sterowalnych jest podprzestrzenią liniową przestrzeni stanów.
1
n
S lin B,AB, ,A B
−
⎡
⎤
=
⎣
⎦
Def.: Stan x
0
nazywać będziemy osiągalnym, jeżeli istnieje ograniczone sterowanie przeprowadzające układ z x
0
sprowadzające wektor
stanu układu z punktu 0 do x
0
w skończonym czasie.
Tw. Stan x
0
jest osiągalny wtedy i tylko wtedy gdy jest sterowalny UKŁAD CIĄŁY!!.
Wniosek:
Jeśli
1
2
x
S , x
S ,
∈
∈
, to istnieje ograniczone sterowanie przeprowadzające układ z x
1
do x
2
w skończonym czasie.
Def.: Układ, w którym przestrzeń stanów sterowalnych pokrywa się z przestrzenia stanu nazywamy całkowicie sterowalnym.
Wniosek: Koniecznym I dostatecznym warunkiem całkowitej sterowalności układu jest
66
Automatyka i sterowanie19 Powtórzenie
1
n
rank B,AB, ,A B
n
−
⎡
⎤ =
⎣
⎦
. Dla układu jednowejściowego B=b :
1
0
n
det b,Ab, ,A b
−
⎡
⎤ ≠
⎣
⎦
1
n
S
Q
B,AB, ,A B
−
⎡
⎤
= ⎣
⎦
macierz sterowalności układu.
Sterowalność a liniowe przekształcenie zmiennych stanu:
wprowadzamy nowe zmienne stanu:
0
Pq( t ) x( t ), det P
=
≠
równanie stanu
d
Pq( t ) APq( t ) Bu( t )
nowe
dt
y( t ) CPq( t ) Du( t )
now
równanie wyjś a
e
ci
=
+
=
+
1
1
równanie st
d
q( t ) P APq( t ) P Bu( t )
nowe
dt
y( t ) CPq( t ) Du( t )
anu
równanie wyjścia
nowe
−
−
=
+
=
+
67
Automatyka i sterowanie19 Powtórzenie
1
1
d
q( t ) Aq( t ) Bu( t )
A P AP, B P B
dt
y( t ) Cq( t ) Du( t )
C CP
−
−
=
+
=
=
=
+
=
Modalny warunek sterowalności:
Tw.: Układ o macierzach
1
1
1
1
1
2
0
0
0
0
0
0
n
n
k nk
k
s I
B
s I
B
A
B
s I
B
⎡
⎤
⎡ ⎤
⎢
⎥
⎢ ⎥
⎢
⎥
⎢ ⎥
=
=
⎢
⎥
⎢ ⎥
⎢
⎥
⎢ ⎥
⎣
⎦
⎣ ⎦
jest całkowicie sterowalny wtedy i tylko wtedy, gdy
1
i
i
rank B
n
i
,...,k
=
=
.
Dow.:
1
1
1
1
1
1
1
n
Sq
n
S
Q
P B,P AB, ,P A B
P
B,AB, ,A B
P Q
−
−
−
−
−
−
−
⎡
⎤
=
=
⎣
⎦
⎡
⎤
=
=
⎣
⎦
68
Automatyka i sterowanie19 Powtórzenie
1
1
1
1 1
1
1
1
1
1
1
1
1
1
1
2
2
2
2
1
2
2
2
2
2
1
1
1
1
1
0
0
0
0
0
0
n
n
n
n
n
n
n
n
n
n
n
S
n
n
k
k
k
k
k
k
nk
k nk
k
nk
B
s B
B
s B
I
s I
s
I
B
s B
B
s B
I
s I
s
I
Q
B,AB, ,A B
B
s B
B
s B
I
s I
s
I
−
−
−
−
−
−
−
⎡
⎤
⎡
⎤
⎡
⎤
⎢
⎥
⎢
⎥
⎢
⎥
⎢
⎥
⎢
⎥
⎢
⎥
⎡
⎤
=
=
=
⎣
⎦ ⎢
⎥
⎢
⎥
⎢
⎥
⎢
⎥
⎢
⎥
⎢
⎥
⎣
⎦
⎣
⎦
⎣
⎦
Rozważmy przekształcenie układu do postaci kanonicznej diagonalnej:
1
2
0
0
0
0
0
0
n
s
s
A
s
⎡
⎤
⎢
⎥
⎢
⎥
=
⎢
⎥
⎢
⎥
⎣
⎦
,
1
1
A V AV , B V B
−
−
=
=
- ten układ będzie całkowicie sterowalny wtedy i tylko wtedy gdy każdy z wierszy
69
Automatyka i sterowanie19 Powtórzenie
macierzy
1
B V B
−
=
będzie niezerowy, czyli
0
T
i
i w B
∀
≠
, gdzie
1
1
2
T
T
T
n
w
w
V
:W
w
−
⎡
⎤
⎢
⎥
⎢
⎥
=
=
⎢
⎥
⎢
⎥
⎣
⎦
.
Porównajmy ten warunek z postacią modalną rozwiązania równania stanu:
( )
0
0
1
1
1
0
0
i
i
i
i
t
t
n
n
n
s t
s t
s t
s
T
T
T
i
i
i
i
i
i
i
i
i
x( t )
e v w x
e
v w Bu( )d
e v w x
e
Bu( )d
τ
τ
τ τ
τ τ
−
−
=
=
=
⎡
⎤
=
+
=
+
⎢
⎥
⎣
⎦
∑
∑
∑
∫
∫
0
T
i
w B
≠
warunek sterowalności i-tego modu
Dualizm sterowalności i obserwowalności:
Para (A,B) jest sterowalna
⇔
Para (B
T
,A
T
) jest obserwowalna
Para (C,A) jest obserwowalna
⇔
Para (A
T
,B
T
) jest sterowalna
Postać kanoniczna Kalmana równań stanu
70
Automatyka i sterowanie19 Powtórzenie
1
0
0
1
0
0
1
0
0
0
1
s no
s no
s no/ s no
s no/ s o
s no/ ns no
s no/ ns o
s o
s o
s o/ s o
s o/ ns o
ns no
ns no/ ns no
ns no/ ns o
ns no
ns o
ns o/ ns o
A
A
A
A
x
(( k
)T )
x
( kT )
A
A
x (( k
)T )
x ( kT )
A
A
x
(( k
)T )
x
( kT
A
x
(( k
)T )
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
+
⎡
⎤
⎡
⎤
⎢
⎥
⎢
⎥
+
⎢
⎥
⎢
⎥ =
⎢
⎥
⎢
⎥
+
⎢
⎥
⎢
⎥
+
⎣
⎦ ⎣
⎦
0
0
s no
s o
ns o
B
B
u( kT )
)
x
( kT )
−
−
−
⎡
⎤ ⎡
⎤
⎢
⎥ ⎢
⎥
⎢
⎥ ⎢
⎥
+
⎢
⎥ ⎢
⎥
⎢
⎥ ⎢
⎥
⎣
⎦ ⎣
⎦
[
]
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎣
⎡
=
−
−
−
−
−
−
)
(
)
(
)
(
)
(
0
0
)
(
kT
x
kT
x
kT
x
kT
x
C
C
kT
y
o
ns
no
ns
o
s
no
s
o
ns
o
s
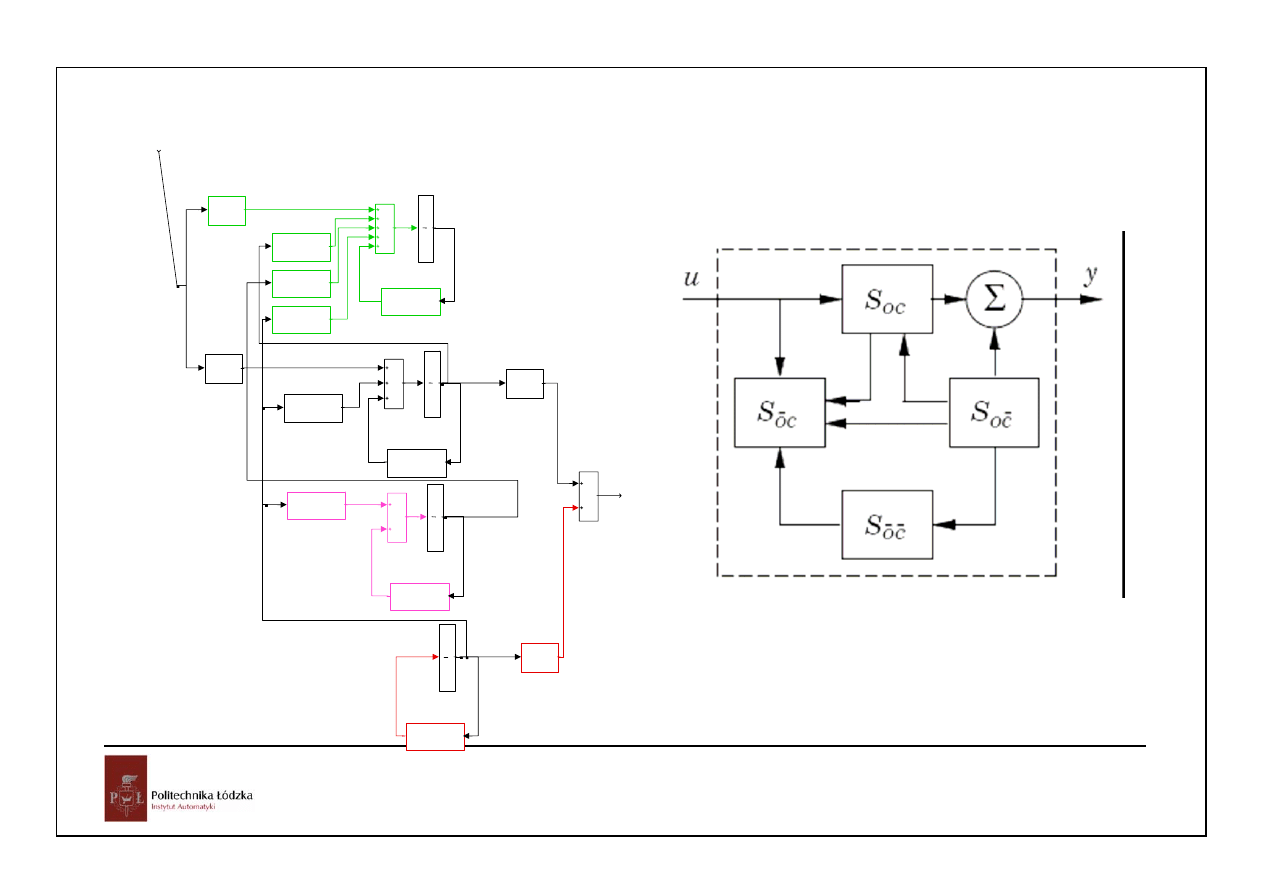
71
Automatyka i sterowanie19 Powtórzenie
xs-no
xs-o
u
xns-no
xns-o
y
z
1
Unit Delay3
z
1
Unit Delay2
z
1
Unit Delay1
z
1
Unit Delay
Cns-o
.3
Cs-o
.2
Bs-o
.1
..5
..4
..1
Ans-o/ns-o
...9
Ans-no/ns-no
...7
Ans-no/ns-o
...6
As-o/ns-o
...5
As-no/ns-o
...4
As-no/ns-no
...3
As-no/s-o
...2
As-o/s-o
...1
As-no/s-no
...
..
Bs-no
.
72
Automatyka i sterowanie19 Powtórzenie
⎥
⎦
⎤
⎢
⎣
⎡
−
=
⎥
⎦
⎤
⎢
⎣
⎡
−
−
−
−
−
1
1
1
1
1
0
0
Y
ZY
X
X
Y
Z
X
[
]
o
ns
o
s
C
C
z
G
−
−
=
0
0
)
(
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎣
⎡
⎟
⎟
⎟
⎟
⎟
⎠
⎞
⎜
⎜
⎜
⎜
⎜
⎝
⎛
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎣
⎡
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
0
0
0
0
0
0
0
0
0
1
/
/
/
/
/
/
/
/
/
o
s
no
s
o
ns
o
ns
o
ns
no
ns
no
ns
no
ns
o
ns
o
s
o
s
o
s
o
ns
no
s
no
ns
no
s
o
s
no
s
no
s
no
s
B
B
A
A
A
A
A
A
A
A
A
zI
=
[
]
o
ns
o
s
C
C
−
−
=
0
0
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎣
⎡
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎣
⎡
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
0
0
0
0
0
0
0
0
0
1
/
/
/
/
/
/
/
/
/
o
s
no
s
o
ns
o
ns
o
ns
no
ns
no
ns
no
ns
o
ns
o
s
o
s
o
s
o
ns
no
s
no
ns
no
s
o
s
no
s
no
s
no
s
B
B
A
zI
A
A
zI
A
A
zI
A
A
A
A
zI
=
73
Automatyka i sterowanie19 Powtórzenie
[
]
o
ns
o
s
C
C
−
−
=
0
0
(
)
(
)
(
)
(
)
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎣
⎡
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎣
⎡
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
0
0
0
0
0
0
0
*
*
0
*
*
*
1
/
/
1
/
1
/
1
/
o
s
no
s
o
ns
o
ns
o
ns
no
ns
no
ns
no
ns
o
s
o
s
no
s
no
s
B
B
A
zI
A
A
zI
A
zI
A
zI
[
]
o
ns
o
s
C
C
−
−
=
0
0
(
)
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎣
⎡
−
−
−
−
−
0
0
*
1
/
o
s
o
s
o
s
B
A
zI
=
(
)
o
s
o
s
o
s
o
s
B
A
zI
C
−
−
−
−
−
−
1
/
(
)
o
s
o
s
o
s
o
s
B
A
zI
C
z
G
−
−
−
−
−
−
=
1
/
)
(
(
)
(
)
(
)
B
A
zI
Cadj
A
zI
B
A
zI
C
z
G
−
−
=
−
=
−
det
1
)
(
1

74
Automatyka i sterowanie19 Powtórzenie
21.
Formuła Ackermana – wzór, sens, do czego służy. Wyprowadzenie sprzężenia zwrotnego od wektora stanu
powodującego przesuniecie biegunów układu do zadanych położeń dla układu w postaci kanonicznej sterowalnej.
Tylko wartości własne części sterowalnej i obserwowalnej mogą być zmienione przez macierz K w sprzężeniu zwrotnym!!
[
]
1
1
0 0
1
n
c
n
K
B AB
A B
M ( A )
−
−
⎡
⎤
=
⎣
⎦
Szczególnie łatwo:
1
1
0
1
0
0
0
0
1
0
1
n
n
A
B
a
a
a
−
⎡
⎤
⎡ ⎤
⎢
⎥
⎢ ⎥
⎢
⎥
⎢ ⎥
=
=
⎢
⎥
⎢ ⎥
⎢
⎥
⎢ ⎥
−
−
−
⎣ ⎦
⎣
⎦
Postać będąca wynikiem stosowania
pierwszego wariantu metody bezpośredniej
wyboru zmiennych stanu.
Postać kanoniczna sterowalna
Postać normalna regulatorowa
75
Automatyka i sterowanie19 Powtórzenie
[
]
(
) (
)
(
)
1
2
1
1
1
1
2
1
1
1
0
1
0
0
0
0
1
0
1
0
1
0
0
1
0
0
0
1
0
0
1
n
n
n
n
n
n
c ,n
c ,n
c ,
A BK
k
k
k
a
a
a
a
k
a
k
a
k
a
a
a
−
−
−
⎡
⎤ ⎡ ⎤
⎢
⎥ ⎢ ⎥
⎢
⎥ ⎢ ⎥
−
=
−
=
⎢
⎥ ⎢ ⎥
⎢
⎥ ⎢ ⎥
−
−
−
⎣ ⎦
⎣
⎦
⎡
⎤ ⎡
⎤
⎢
⎥ ⎢
⎥
⎢
⎥ ⎢
⎥
=
=
⎢
⎥ ⎢
⎥
⎢
⎥ ⎢
⎥
−
+
−
+
−
+
−
−
−
⎣
⎦
⎣
⎦
1
2
1
1
1
1
c ,n
n
c ,n
n
n
c ,
k
a
a
k
a
a
..............
k
a
a
−
−
=
−
=
−
=
−
76
Automatyka i sterowanie19 Powtórzenie
22. Wyprowadzenie metody projektowania sterowania dead-beat.
Obliczanie sterowania dead-beat
Układ
)
(
)
(
)
(
)
(
)
)
1
((
kT
cx
kT
y
kT
bu
kT
Ax
T
k
x
=
+
=
+
należy wyposażyć w regulator zapewniający zanikanie przebiegów przejściowych w N okresach impulsowania i zerowy uchyb
ustalony przy wymuszeniu jednostkowym.
[
]
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎣
⎡
−
=
−
−
)
0
(
)
(
)
)
1
((
)
(
1
0
u
T
u
T
N
u
b
A
Ab
b
x
A
NT
x
N
N
1
)
(
)
(
=
=
NT
cx
NT
y
77
Automatyka i sterowanie19 Powtórzenie
N
k
dla
NT
u
kT
u
kT
x
T
k
x
≥
=
=
+
)
(
)
(
),
(
)
)
1
((
)
(
)
(
)
(
NT
bu
NT
Ax
NT
x
+
=
Jeśli A nie ma wart wł. równych 1, to macierz I-A jest odwracalna i
)
(
)
(
)
(
1
NT
bu
A
I
NT
x
−
−
=
1
)
(
)
(
)
(
1
=
−
=
−
NT
bu
A
I
c
NT
y
)
1
(
1
)
(
1
)
(
1
o
G
b
A
I
c
NT
u
=
−
=
−
Potem wyznacza się x(NT), potem ciąg sterujący.
Jeśli A ma wart wł. równą 1, to u(NT)=0 i
(
)
0
)
(
=
−
NT
x
A
I
Równanie to ma wiersze liniowo zależne – jeden z nich należy zastąpić przez
1
)
(
=
NT
cx
Stąd wyznacza się x(NT), potem ciąg sterujący.
78
Automatyka i sterowanie19 Powtórzenie
23. Obserwator pełnego rzędu – struktura, równanie błędu estymacji, zasady i metoda projektowania.
Rozważać będziemy opis układu w postaci:
(a)
równanie st
d
x( t ) Ax( t ) Bu( t )
dt
y(
anu
równan
t ) C
ie w
x( t )
yjścia
=
+
=
x(t) – wektor zmiennych stanu o wymiarze nx1,
u(t) – wektor wejść/sterowań o wymiarze rx1
y(t) – wektor wyjść o wymiarze mx1
Równaniem obserwatora jest więc
(
)
e
e
d
ˆ
ˆ
x( t )
A K C x( t ) Bu( t ) K y( t )
dt
=
−
+
+
lub inaczej:
(
)
e
d
ˆ
ˆ
ˆ
x( t ) Ax( t ) Bu( t ) K y( t ) Cx( t )
dt
=
+
+
−
Model układu
Sprzężenie od różnicy wyjść układu i modelu
79
Automatyka i sterowanie19 Powtórzenie
(
)
e
e
d
ˆ
ˆ
x( t )
A K C x( t ) Bu( t ) K y( t )
dt
=
−
+
+
odejmujemy od
d
x( t ) Ax( t ) Bu( t )
dt
=
+
(
)
(
)
(
)
e
e( t )
d
ˆ
ˆ
ˆ
x( t ) x( t )
A x( t ) x( t )
K C x( t ) x( t )
dt
−
=
−
−
−
(
)
e
d
e( t )
A K C e( t )
dt
=
−
Warunkiem koniecznym działania obserwatora jest by macierz
(
)
e
A K C
−
była stabilna, a dostatecznym by estymacja była
szybka by wartości własne
(
)
e
A K C
−
leżały bardziej na lewo (2-4 razy) niż wartości własne A. Wartości własne
(
)
e
A K C
−
są takie same jak wartości własne
(
)
T
T
T
T
e
e
A K C
A
C K
−
=
−
. Macierz
T
e
K
musi być tak
zaprojektowana by przesunąć wartości własne w układzie
(
)
T
T
A ,C
w zadane położenia. Więc:
80
Automatyka i sterowanie19 Powtórzenie
1. Sterowalność pary
(
)
T
T
A ,C
jest konieczna dla rozwiązania tego zadania, czyli obserwowalność pary
(
)
C,A
jest konieczna
dla zaprojektowania obserwatora.
2.
T
e
K
można wyznaczyć z formuły Ackermana
[
]
( )
1
1
0 0
1
n
T
T
T
T
T
T
T
e
c
n
K
C
A C
A
C
M ( A )
−
−
⎡
⎤
=
⎢
⎥
⎣
⎦
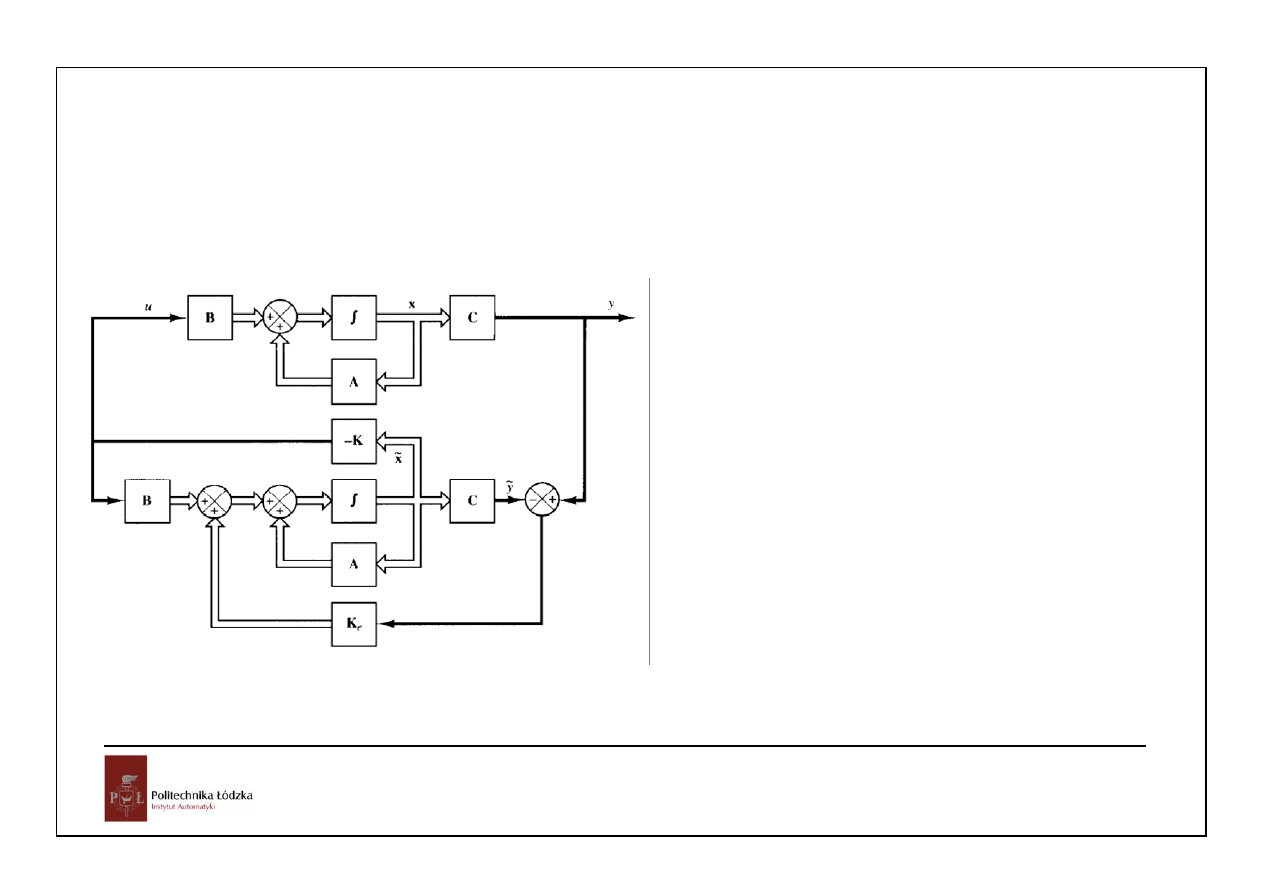
81
Automatyka i sterowanie19 Powtórzenie
24. Przesuwanie biegunów z zastosowaniem obserwatora. Struktura układu, wartości własne układu zamkniętego.
Połączmy teraz obserwator z problemem przesuwania biegunów:
ˆ
u( t )
Kx( t )
= −
.
82
Automatyka i sterowanie19 Powtórzenie
Otrzymaliśmy układ stopnia 2n. Jakie będą jego bieguny?
[
]
d
ˆ
x( t ) Ax( t ) BKx( t )
dt
d
x( t ) Ax( t ) BK x( t ) e( t )
dt
=
−
=
−
−
(
)
e
d
e( t )
A K C e( t )
dt
=
−
0
e
A BK
BK
x( t )
x( t )
d
A K C
e( t )
e( t )
dt
−
⎡
⎤
⎡
⎤
⎡
⎤
= ⎢
⎥
⎢
⎥
⎢
⎥
−
⎣
⎦
⎣
⎦
⎣
⎦
wielomianem charakterystycznym jest
(
)
(
)
e
det sI
A BK det sI
A K C
⎡
⎤
⎡ −
−
⎤
−
−
⎣
⎦
⎣
⎦
83
Automatyka i sterowanie19 Powtórzenie
Takie same wartości własne będzie miał układ równań
d
ˆ
x( t ) Ax( t ) BKx( t )
dt
=
−
(
)
(
)
e
e
e
e
d
ˆ
ˆ
ˆ
ˆ
x( t )
A K C x( t ) Bu( t ) K y( t )
A K C x( t ) BKx( t ) K Cx( t )
dt
=
−
+
+
=
−
−
+
e
e
A
BK
x( t )
x( t )
d
ˆ
ˆ
K C A BK K C
x( t )
x( t )
dt
−
⎡
⎤
⎡
⎤
⎡
⎤
= ⎢
⎥
⎢
⎥
⎢
⎥
−
−
⎣
⎦
⎣
⎦
⎣
⎦
, bo
0
x( t )
I
x( t )
ˆx( t )
I
I
e( t )
⎡
⎤ ⎡
⎤ ⎡
⎤
=
⎢
⎥ ⎢
⎥ ⎢
⎥
−
⎣
⎦ ⎣
⎦ ⎣
⎦
,
czyli układ możemy projektować niezależnie
(
)
(
)
e
det sI
A BK det sI
A K C
⎡
⎤
⎡ −
−
⎤
−
−
⎣
⎦
⎣
⎦
wartości własne odpowiadające za regulację wektora stanu x(t)
wartości własne odpowiadające za dynamikę wektora stanu obserwatora
ˆx( t )
84
Automatyka i sterowanie19 Powtórzenie
25.
Omówić wpływ okresu próbkowania na właściwości układu.
Ostatni wykład
Wyszukiwarka
Podobne podstrony:
automatyka i sterowanie wyklad Nieznany (8)
automatyka i sterowanie wyklad Nieznany (2)
automatyka i sterowanie wyklad Nieznany (7)
automatyka i sterowanie wyklad Nieznany (14)
automatyka i sterowanie wyklad Nieznany (12)
automatyka i sterowanie wyklad Nieznany (5)
automatyka i sterowanie wyklad Nieznany (10)
automatyka i sterowanie wyklad Nieznany (3)
automatyka i sterowanie wyklad Nieznany (8)
automatyka i sterowanie wyklad Nieznany (2)
automatyka i sterowanie wyklad 16
automatyka i sterowanie wyklad 16
automatyka i sterowanie wyklad 15
automatyka i sterowanie wyklad 3
automatyczny sterownik oswietle Nieznany (2)
automatyka i sterowanie wyklad 9
automatyka i sterowanie wyklad 11
automatyka i sterowanie wyklad 4
automatyka i sterowanie wyklad 5
więcej podobnych podstron