
Podstawy modelowania
cybernetycznego systemów
biologicznych
Wykład nr 1 z kursu
Wykład nr 1 z kursu
Biocybernetyki
dla Inżynierii Biomedycznej
prowadzonego przez
Prof. Ryszarda Tadeusiewicza

Na wykładach nr 1, 2 i 3
z Biocybernetyki omawiane były
następujące zagadnienia:
1. Sposób definicji modelu pojedynczego obiektu
biologicznego
2. Sposób łączenia modeli pojedynczych obiektów
celem formowania modeli złożonych systemów
3.
4. Sprzężenie zwrotne i jego właściwości
Dla zagadnień tych nie ma jeszcze komputerowych
slajdów, trzeba więc się tego nauczyć na
podstawie notatek z wykładów

Słowo wstępu
Słowo
Cybernetyka
zostało po raz pierwszy użyte w
książce pt. „Cybernetyka- czyli sterowanie i komunikacja w
zwierzęciu i maszynie
”
„(…)naukowcy uświadomili sobie, że problemy komunikacji,
sterowania i mechaniki statycznej stanowią zasadniczo jedną
„(…)naukowcy uświadomili sobie, że problemy komunikacji,
sterowania i mechaniki statycznej stanowią zasadniczo jedną
całość, niezależnie od tego czy dotyczą maszyny czy istoty
żywej.
(…) Zdecydowaliśmy się nadać całej dziedzinie teorii sterowania
w maszynach i zwierzętach nazwę cybernetyki, którą
utworzyliśmy od grackiego słowa :
κυβενετεσ
, czyli sternik.

Metodą udostępniania technice osiągnięć biologii
może być między innymi
modelowanie cybernetyczne
. Model
jest zawsze sformalizowanym (a więc łatwym do precyzyjnej
analizy przez inżyniera) i bardzo konkretnym opisem
określonego systemu lub procesu. Na podstawie modelu,
dostępnego do rozmaitych badań i symulacyjnych
eksperymentów, można przeprowadzić ścisłe rozumowanie, które
owocować może udaną konstrukcją systemu technicznego
wzorowanego na biologicznym oryginale. Co więcej, model jako
działająca imitacja określonego systemu biologicznego, może być
działająca imitacja określonego systemu biologicznego, może być
bezpośrednio zaangażowany do wykonywania pożądanej
czynności w technice, stając się prototypem poszukiwanego
urządzenia.
Np. Model systemu mięśni dłoni jako element chwytający
robota
Elementy systemu nerwowego i sieci neuronowe.

Podstawowe zasady i używana notacja
Podstawowe zasady i używana notacja
Zwykle modele systemów biologicznych prezentowane są
jako abstrakcyjne odwzorowania, przekształcające zbiory
sygnałów wejściowych
w zbiór sygnałów wyjściowych.
Zbiór –
jest to podstawowe pojęcie (Ich nazwy są dużymi
literami). Ważną cechą zbioru jest jego moc (liczba
literami). Ważną cechą zbioru jest jego moc (liczba
elementów) do zapisu mocy zbioru używany jest symbol
#. Np. moc zbioru zapisujemy następująco : #Ω
Elementy
zbiorów zapisywane są kursywą, przy czym mogą
to być obiekty skalarne lub wektorowe, a także mogą
one być rozważane jako ustalone wartości lub jako jako
funkcje jednej lub wielu zmiennych.
Podstawowe zasady i używana notacja
Podstawowe zasady i używana notacja
Definiuje się zbiór parametrów (stałych ) występujących we zworach,
oznaczone głównie jako C. Elementy tego zbioru oznaczamy
symbolami c
1
, c
2
, c
3
, … , c
k-1
, c
k
.
W razie potrzeby wprowadzić można dodatkowe identyfikatory
używanych sygnałów lub parametrów w postaci dodatkowych
wskaźników dopisywanych u góry odpowiednich symboli
wskaźników dopisywanych u góry odpowiednich symboli
zapisane w nawiasie żeby nie pomylić z potęgowaniem. Np. x
i
(h)
–
jest symbolem sygnału hamowania presynaptycznego w neuronie.
Np. przez dodanie tyldy nad znakiem x ( ) można odróżnić sygnały
wyjściowe od wejściowych w neuronie.
oznacza uśrednianie.
x
~
x

Odwzorowania
Odwzorowania
Opisywane modele traktowane są jako odwzorowania
przekształcające elementy jednego zbioru w elementy
drugiego zbioru. Odwzorowania te zawsze oznaczane są
symbolem ϕ z odpowiednimi indeksami u dołu.
Definiuje się je, podając dwa zbiory: wejściowy i
wyjściowy. W zapisie ogólnym wygląda to następująco:
wyjściowy. W zapisie ogólnym wygląda to następująco:
Ω
⇒
Θ
ϕ :
Co interpretować należy w ten sposób, że elementom
Ξ∈Θ przyporządkowane są za pomocą odwzorowania φ
elementy ω∈Ω

Odwzorowania mogą być składane, w wyniku czego
tworzy się nowe odwzorowanie. Symbolem składania
odwzorowań jest
⊗, a jego znaczenie określić można
następująco: Niech dane będą odwzorowania φ
ω
:
Ω
⇒
Θ
oraz φ
Ξ
: Θ
⇒Ψ. Wówczas odwzorowanie będące złożeniem
φ
=
φ
ω
⊗ φ
Ξ
bezpośrednio przyporządkowuje elementom
ω∈Ω elementy ψ ∈ Ψ.
Formuła typu Θ
Ω
, gdzie Θ i Ω są zbiorami, oznacza
Formuła typu Θ , gdzie Θ i Ω są zbiorami, oznacza
zawsze funkcję argumentu przyjmującego wartości ze
zbioru Ω, o wartościach funkcji dostarczanych ze zbioru
Θ.
Zapis Θ
×Ω oznacza iloczyn kartezjański zbiorów. Zaś K-
krotny iloczyn kartezjański zbioru Ω oznaczamy jako Ω
K
.
Do kompletu informacji na temat notacji dodajemy, że
niekiedy posługiwać się będziemy transformatą
Laplace’a definiowaną jako:
dt
e
)
t
(
p
)}
t
(
p
{
L
)
s
(
P
st
∫
∞
∞
−
−
=
=
Gdzie p(t) ∈ R
R
jest sygnałem zależnym od czasu t ∈T, a
P(s) ∈ C
C
jest jego transformatą, oraz transmitancjami
P(s) ∈ C jest jego transformatą, oraz transmitancjami
operatorowymi oznaczonymi jako G z odpowiednimi
indeksami:
)
s
(
P
)
s
(
P
)
s
(
G
we
wy
=
Gdzie oczywiście P
we
(s)=L{p
we
(t)} oraz
P
wy
(s)=L{p
wy
(t)}

Modelowanie jako wieloetapowy proces
Modelowanie jako wieloetapowy proces
Proces budowy modelu ℳ pewnego systemu
biologicznego ℬ zdefiniujemy formalnie jako
odwzorowanie φ
ℳ
prowadzące od abstrakcyjnie
rozumianej rzeczywistości ℜ do konkretnego modelu
ℳ
:
φ
ℳ
: ℜ
⇒
ℳ
W konkretnych warunkach, realizując odwzorowanie φ
ℳ
dokonujemy czterech, niżej dokładniej
ℜ
ℳ
ℳ
dokonujemy czterech, niżej dokładniej
scharakteryzowanych odwzorowań:
φ
ℳ
= φ
ℜ ℬ
⊗ φ
ℬ
௰
⊗ φ
௰ ℑ
⊗ φ
ℐ ℳ
Istotą tych odwzorowań sprowadza się do zabiegów
ograniczających, których skutkiem modelu ℳ w
stosunku do systemu ℬ. Wynika z tego ograniczona
użyteczność zbudowanego modelu ℳ .
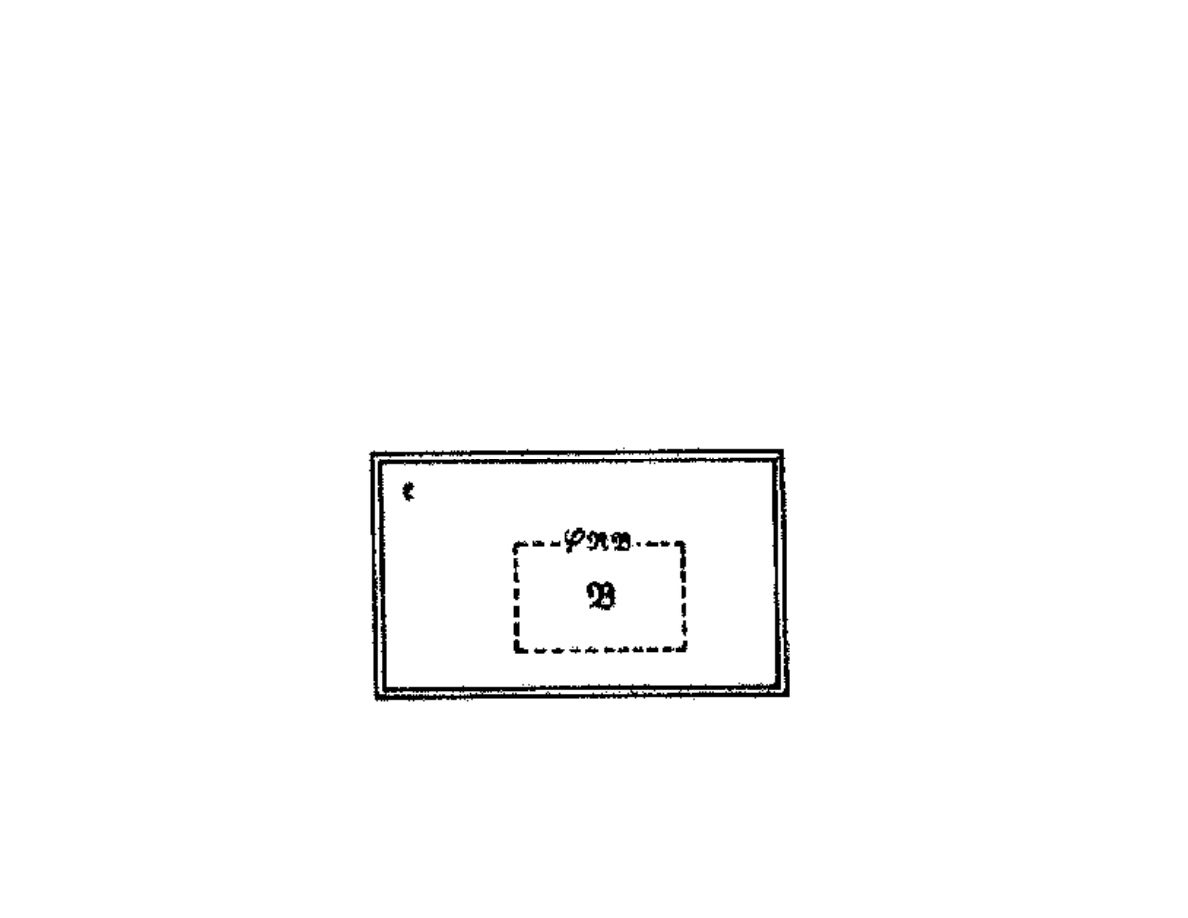
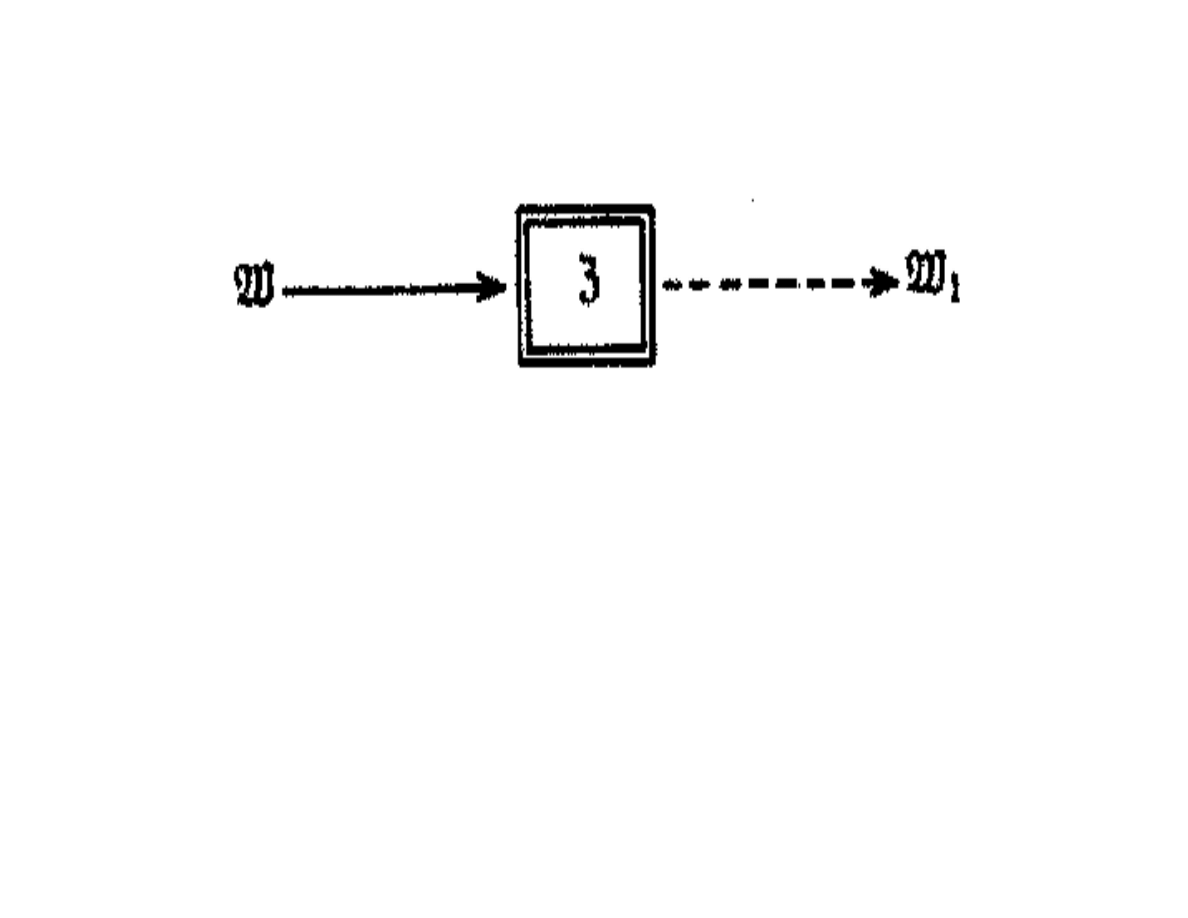
Wybierając obiekt modelowania ℬ dokonujemy pierwszego i
podstawowego ograniczenia, gdyż z – ciągłej w swojej naturze-
rzeczywistości ℜ , wydzielamy interesujący nas obiekt ℬ ,
wstawiając pomiędzy tenże obiekt a pozostałe elementy
rzeczywistości (nazywane umownie otoczeniem ℭ) granice, których
w istocie nie ma. Omawiany zabieg może być symbolicznie
zapisany także jako odwzorowanie
φ
ℜ ℬ
: ℜ ⇒ ℬ,
Przy czym zakładać będziemy, że ℬ ⋂ ℭ =
⌀ oraz że ℬ ⋃ ℭ = ℜ
Rys1. Wydzielenie φ
ℜ ℬ
obiektu modelowania ℬ z ciągłej rzeczywistości ℜ
stanowi pierwszy krok modelowania φ
ℳ
i jest pierwszym źródłem
niedoskonałości modelu ℳ.

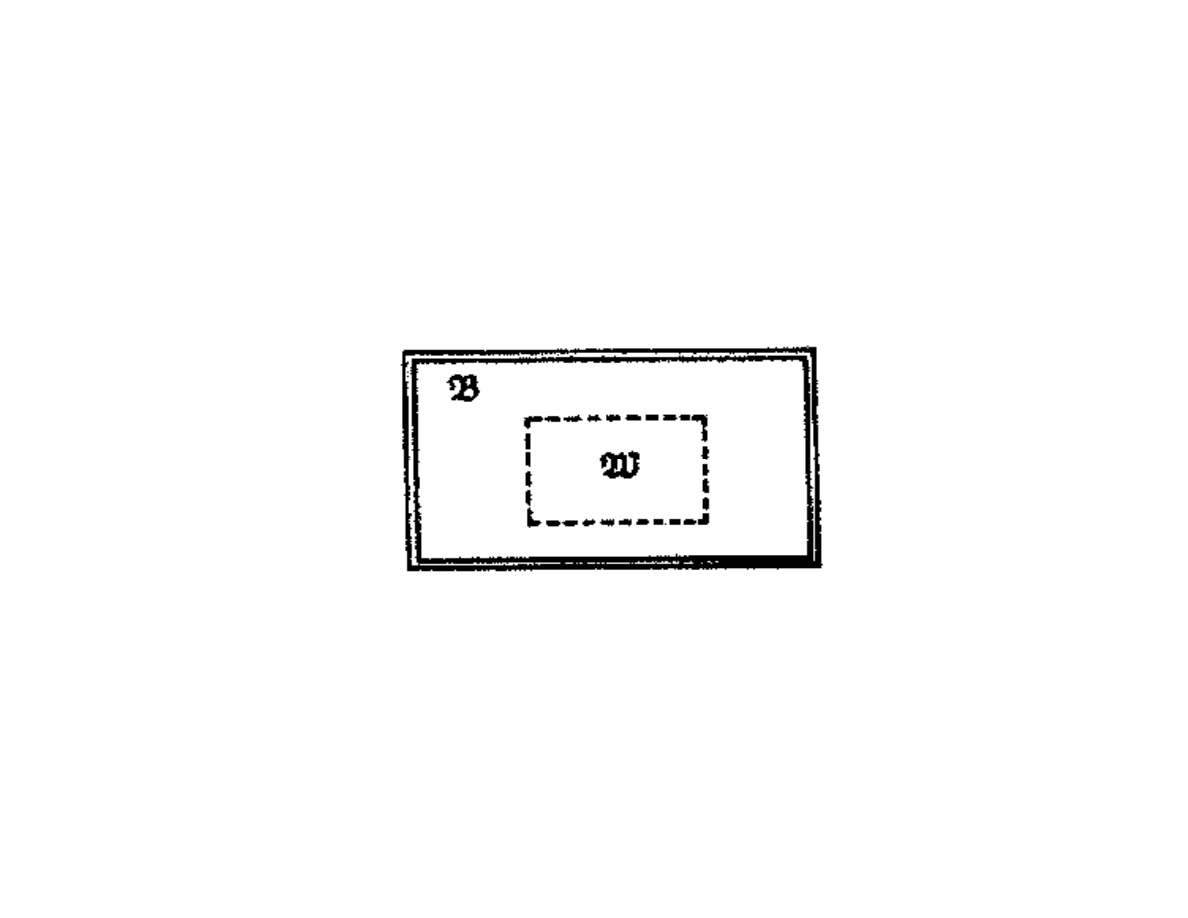
Kolejny czynnik, ważący na doskonałości modelu, wiąże się
z faktem, że modelowaniu nie jest poddawany
rzeczywisty obiekt ℬ, lecz w istocie nasza wiedza o nim,
oznaczana dalej
௰. Występuje więc kolejne odwzorowanie,
dzielące budowany model ℳ od rzeczywistości ℜ.
Odwzorowanie to oznaczamy φ
ℬ
௰
:
φ
ℬ
௰
: ℬ ⇒
௰,
ℬ
ℬ ⇒
Wiedza
௰ jest wzbogacana, zatem można ją wyrazić jako
chwilowy stan dynamicznie zmieniającego się zasobu
wiadomości. Oznaczając przez ℑ zasób informacji o
rozważanym obiekcie biologicznym ℬ możemy to wyrazić
wzorem :
௰= ℑ
T
Mimo, że wiedza
௰ jest stale uzupełniana, to w stosunku
do rzeczywistego obiektu ℬ, z jego potencjalnie nie
skończoną liczbą różnych własności i aspektów (#ℑ
→∞
moc zbioru informacji dąży do nieskończoności) zawsze
będzie niepełna
Przedmiotem modelowania pozostaje wiedza
௰ o
modelowanym obiekcie
ℬ
, a nie on sam; jest to
drugie ważne źródło ograniczeń i
niedoskonałości modelu ℳ

Cel ℑ budowy modelu ℳ wpływa na dobór faktów
௰
1
⊆
௰
, uwzględniających w strukturze modelu, oraz takich
௰
2
⊆
௰ , które zostają pominięte lub których oddziaływanie
jest opisane w sposób uproszczony lub uśredniony. W
praktyce zwykle #
௰
1
< #
௰
2
. Oznaczamy to selekcyjne
działanie zbioru jako kolejne odwzorowanie φ
௰ ℑ
definiując je w następujący sposób:
φ
௰ ℑ
:
௰ ⇒௰
1
,
⊆
௰ ℑ
⇒
1
Gdzie podzbiór
௰
1
⊆
௰ był już określony. Obecność
odwzorowania φ
௰ ℑ
oznacz między innymi, że ten sam
obiekt b ∈ ℬ, modelowany jest dla różnych celów ʓ
1
∈ ℑ,
ʓ
2
∈ ℑ, …, ʓ
k
∈ ℑ, może dostarczać wyrażnie różniących
się modeli m
1
∈ℳ, m
2
∈ℳ, …, m
k
∈ℳ (m
1
≠ m
2
≠… ≠m
k
)
ℑ
ℬ
Cel modelowania ℑ jest „filtrem”, przy użyciu
którego z całości wiedzy
௰ o obiekcie
ℬ
wydobywana jest drobna część
௰
1
, będąca
potem podstawą do modelowania
φ
ℳ

Ostatni składnik, ograniczający wiarygodność modelowania, wiąże się
z używanymi narzędziami ℐ. Rozróżnić można narzędzia
dwojakiego rodzaju, tak jak w procesie modelu, który definiujemy
następująco:
φ
ℐ ℳ
: ℳ
1
⇒ℳ
,
Wyodrębnić można dwa etapy : modelowanie matematyczne
φ
ℐ ℳ
(f)
: ℳ
1
⇒ℳ
f
,
ℐ ℳ
ℳ ⇒ℳ
Oraz symulacja komputerowa
φ
ℐ ℳ
(f)
: ℳ
f
⇒ℳ
s
,
Potrzebne są więc dwojakiego rodzaju narzędzia formalne ℐ
f
⊆ ℐ
i
informatyczne ℐ
s
⊆ ℐ
, konieczne do budowy matematycznych
zrębów modelu ℳ
f
⊆ ℳ
i do jego konkretyzacji w formie modelu
ℳ
s
⊆ ℳ
rys 4. Na ostateczny kształt modelu ℳ mają
wpływ – obok wiedzy
௰ o modelowanym obiekcie
ℬ
- także cele modelowania ℑ i narzędzia
modelowania ℐ

Technika Modelowania
Budowę modelu ℳ określonego systemu ℬ zaczynamy od konstrukcji
opisu matematycznego ℳ
f
. Podstawową rolę odgrywają przy tym
sygnały
ຮ, wśród których wyróżnić można sygnały ຮ
we
i
ຮ
wy
zapewniające więź pomiędzy φ
ℭ ℬ
pomiędzy „odciętym” na wstępie
modelowania obiektem ℬ może być opisany w kategoriach relacji :
φ :
ຮ
we
⇒
ຮ
wy
Przed przystąpieniem do budowy modelu ℳ porządkuje się dostępną
wiedzę
௰ na temat modelowanego obiektu ℬ w formie katalogu
⊆ ℑ
ℳ
wiedzę
௰ na temat modelowanego obiektu ℬ w formie katalogu
typowych koincydencji wejście-wyjście
ຮ
we
× ຮ
wy
⊆ ℑ
, a w trakcie
konstrukcji modelu φ
ℳ
poszukuje się takich formuł i zależności
matematycznych ℳ
f
, które zdolne są te zarejestrowane zależności
wiernie odtwarzać. Do realizacji takiego opisu matematycznego
konieczne jest wprowadzenie do modelu parametrów c ∈ C . Wartości
parametrów nie są na ogół znane w momencie konstruowania modelu
ℳ
i jedynym z ważniejszych zadań twórcy modelu ℳ
f
jest zwykłe
ustalenie tych wartości na drodze analizy obserwacji ℑ rzeczywistego
systemu ℬ.

Dobór parametrów modelu nazywany bywa identyfikacją i
jest przedstawiony w postaci odwzorowania:
φ
id
: ℑ ⇒C ⊆ ℜ,
Prowadzącego ze zbioru ℑ informacji o modelowanym
obiekcie b ∈ ℬ do zbioru parametrów C należącego do
zbioru liczb rzeczywistych ℜ, co odpowiada
przypisywaniu poszczególnym parametrom
konkretnych wartości liczbowych.
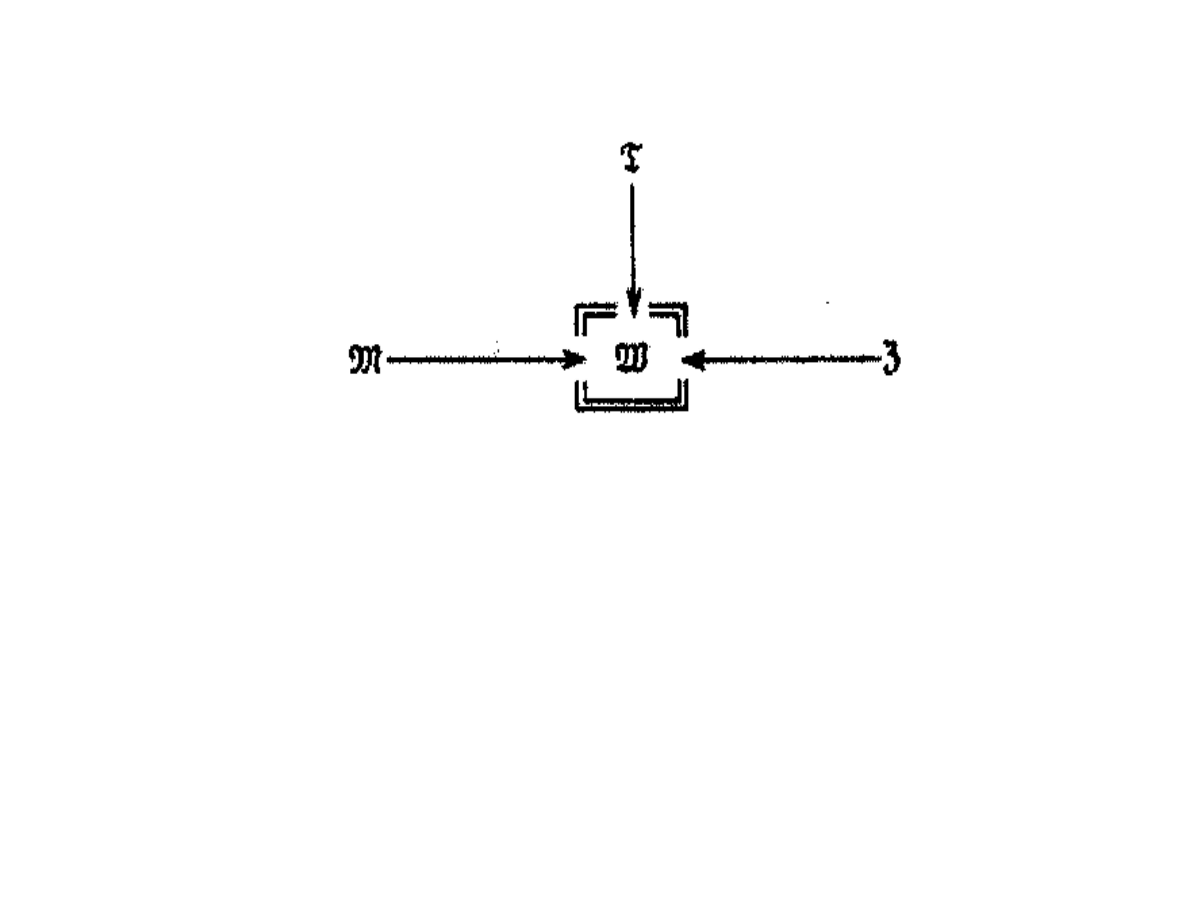
Obok parametrów c ∈ C wprowadza się do modelu
ℳ
Obok parametrów c ∈ C wprowadza się do modelu
zmienne stanu s
s
∈
ຮ
s
, które reprezentują wewnętrzna
dynamikę modelu ℳ
f
; jeśli sygnały wyjściowe
ຮ
wy
zależą nie tylko od sygnału wejściowego s
we
∈
ຮ
we
nadchodzącego w danym momencie, lecz os sytuacji
jaka miała miejsce jakiś czas temu ∆t ∈T wcześniej, to
wówczas w modelu ℳ
S
ten efekt „pamięci”
odwzorowywany jest przez wprowadzenie
odpowiednich stanu.

Liczba wprowadzonych zmiennych stanu #
ຮ
s
jest parametrem
decydującym o złożoności modelu ℳ
f
. W przypadku obiektów
technicznych zmiennym stanu s
s
∈
ຮ
s
odpowiadają oddzielne,
znajdujące się w obiekcie magazyny: energii, masy lub dowolnych
innych zasobów. W modelach matematycznych ℳ
f
zmienne stanu
wiążą się z rzędem równań różniczkowych. Np. dla automatyka
liczba zmiennych stanu odpowiada liczbie parametrów, które trzeba
określić w pewnym ustalonym momencie t
0
∈T, aby na ich
podstawie było możliwe określenie zachowania obiektu ℬ w
dowolnej chwili czasowej dla t>t
0
.
ℬ
Właściwie w tym jest problem że żywy organizm wydaje się
charakteryzować potencjalnie nieskończoną liczbą zmiennych
stanu. Każdy element organizmu ma zdolność nabywania nowych
cech i nie da się zaewidencjonować takiego zestawu danych s
s
,
które pozwolą przewidzieć zachowanie obiektu przez dowolne
długi czas ( ∀ t>t
0
). Wprowadzone zmienne stanu s
s
∈
ຮ
s
są
heurystyczną próbą dopasowania zjawisk ℭ w modelu ℳ do
obserwacji ℑ rzeczywistego obiektu ℬ.

Zaprogramowanie gotowego (w sęsie równań
matematycznych) modelu ℳ
f
dla wybranego
komputera, reprezentowane dalej jako odwzorowanie:
φ
p
: ℳ
f
⇒ ℳ
s
,
pozwala przystąpić do prób symulacji φ
ຮ
. W pierwszej
kolejności dokonuje się eksperymentów weryfikacyjnych
φ
ຮ
(w)
. Polegają one na uruchamianiu modelu z takimi
parametrami c∈C i przy takim przebiegu
kontrolowanych sygnałów (głównie wejściowych s
we
∈
ຮ
we
) , które odpowiadają łącznie znanym sytuacjom w∈
௰
ℑ
ℬ
ℭ
we
) , które odpowiadają łącznie znanym sytuacjom w∈
௰
i zachowaniom i∈ ℑ modelowanego systemu ℬ.
Oczekuje się przy tym, że wyniki modelowania σ∈ ℭ
odwzorowywać będą wówczas znane formy zachowania
i∈ ℑ modelowanego obiektu. Porównując sygnały
(głównie wyjściowe
ຮ
wy
) obliczone w czasie
symulacyjnych badań modelu φ
ຮ
(w)
z wartościami tych
sygnałów, znanymi z obserwacji rzeczywistego systemu-
można podejmować decyzję odnośnie wiarygodności i
poprawności funkcjonowania modelu ℳ
s
.
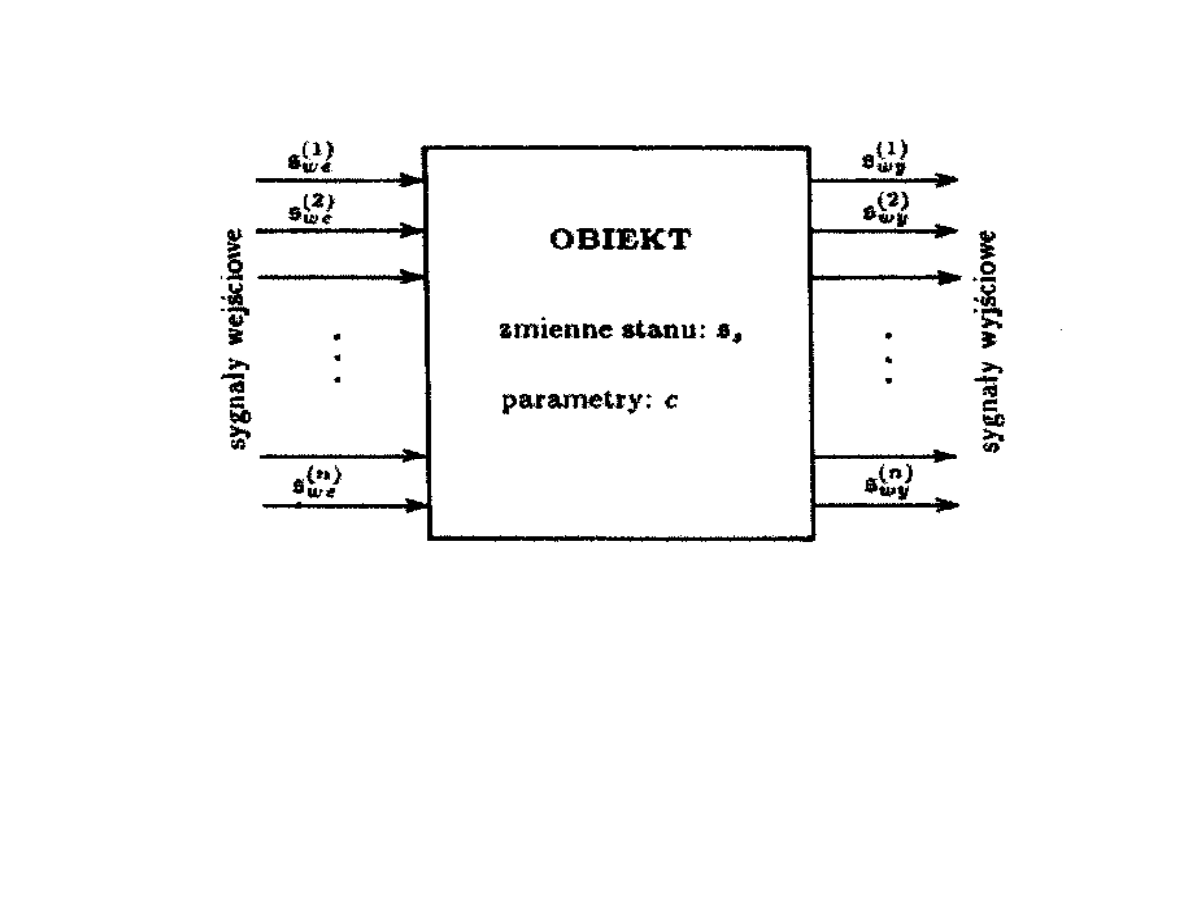
Podstawowe elementy modelu ℳ: sygnały
wejściowe s
we
(i)
∈
ຮ
we
, sygnały wyjściowe
s
wy
(i)
∈
ຮ
wy
, zmienne stanu s
s
∈
ຮ
s
, oraz
parametry c ∈C.
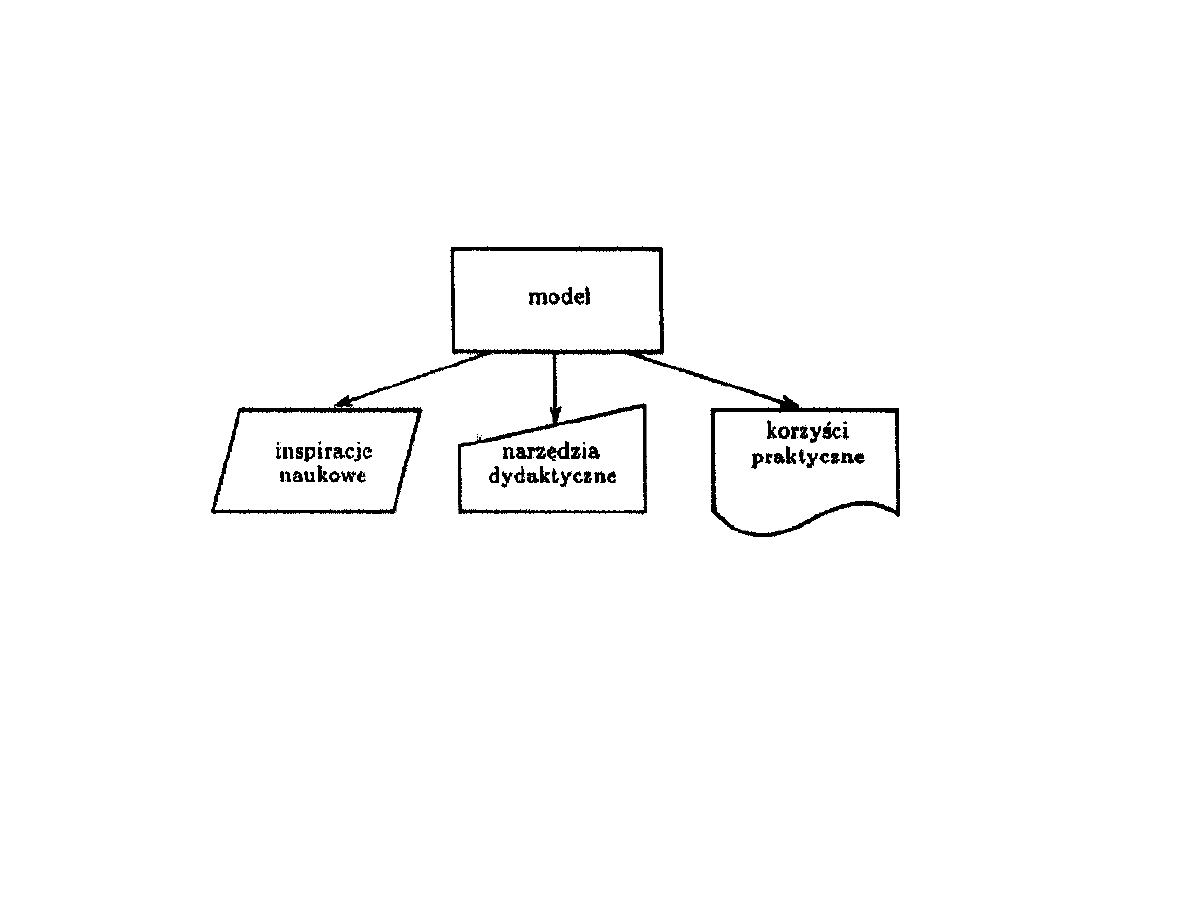
Dopiero gdy upewnimy się, że model działa poprawnie,
można myśleć o jego praktycznym zastosowaniu.
Zbudowany model ℳ może mieć trojakiego rodzaju
zastosowania:
1) Jako źródło inspiracji,
2) Jako narzędzie dydaktyczne,
3) źródło konkretnych korzyści praktycznych.
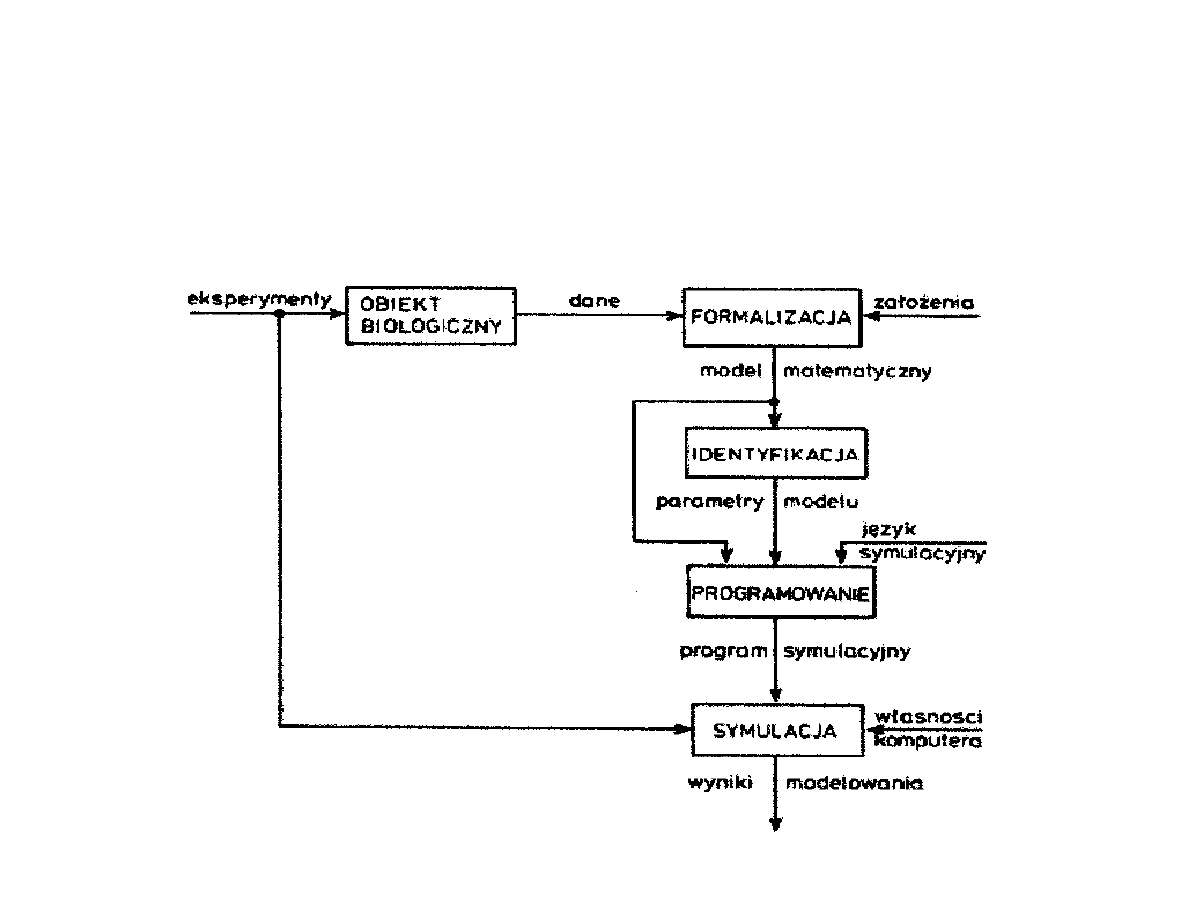
Podsumowanie
Kolejne etapy budowy cybernetycznego modelu systemu
biologicznego.

Przykłady modelów
cybernetycznych
• Układ nerwowy
• Komórka nerwowa
• Model matematyczny
• Model cyfrowy
• Model ciągły
• Model ciągły
• Sieci neuronowe
• Systemy percepcyjne
• System słuchowy
• System wzrokowy
• System hormonalny
Wyszukiwarka
Podobne podstrony:
01 Modele cyklu zyciaid 2855 Nieznany (2)
312[01] 01 122 Arkusz egzaminac Nieznany (2)
,Modelowanie i symulacja system Nieznany (3)
01 Przygotowanie produkcji piek Nieznany (2)
Inteligentny budynek, systemy s Nieznany
22 01 2011 TEST B PSYCHOLOGIA S Nieznany
01 Thermoregulation, Fever PLid Nieznany (2)
01 Konspekt STRESid 2838 Nieznany (2)
22 01 2011 TEST B PSYCHOLOGIA S Nieznany (2)
01 wstepny elektrycznyid 3080 Nieznany
01, PR, arkuszid 2747 Nieznany (2)
712[06] S1 03 Montowanie system Nieznany (2)
01 roztwory buforoweid 2924 Nieznany
01 Stosowanie zasad bezpieczens Nieznany (2)
01 Wiadomości ogólne o systemie elektroenergetycznym
2014 Matura 01 03 2014id 28469 Nieznany (2)
01 Stosowanie sprzetu i urzadze Nieznany (2)
więcej podobnych podstron