Badanie trójfazowego silnika klatkowego
1. Czynno
ś
ci wst
ę
pne
Przed przyst
ą
pieniem do pomiarów nale
ż
y zapozna
ć
si
ę
z budow
ą
stanowiska oraz
danymi znamionowymi badanej maszyny klatkowej oraz przetwornika momentu
obrotowego.
P
N
= ……kW, U
N
=….V I
N
=.….A, cos
ϕϕϕϕ
=….., n
N
=…… obr/min
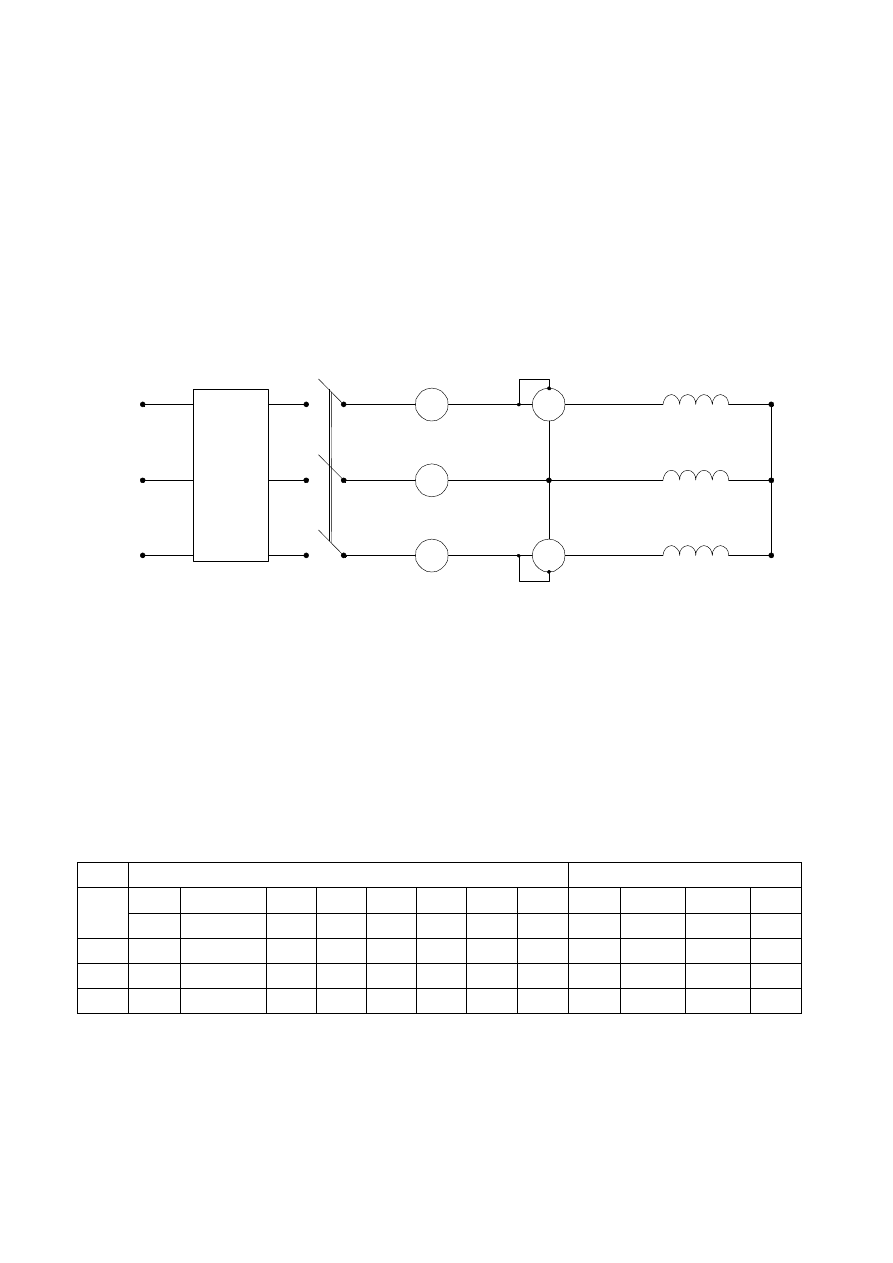
2. Schemat układu pomiarowego:
A
R
W
RS
A
S
A
T
W
TS
Sterownik
napi
ę
cia
przemiennego
f=var
U/f=cons
R
S
T
U
V
W
X
Y
Z
Rys. 1. Schemat poł
ą
cze
ń
silnika
3. Wyznaczenie charakterystyk mechanicznych n(T) dla napi
ę
cia zasilania
U
1
=U
n
, U
1
=0.8U
n
U
1
=0.6U
n
oraz cz
ę
stotliwo
ść
napi
ę
cia zasilaj
ą
cego f
1
= f
n
.
Obci
ąż
enie silnika zmienia
ć
a
ż
do pr
ą
du znamionowego. Wyniki pomiarów zestawi
ć
w
tablicy 3.
Tablica 3. Wyniki pomiarów i oblicze
ń
charakterystyk obci
ąż
enia
Na podstawie wyników wykreśla się charakterystyki:
η
, P, I, cos
ϕ
, n = f(T)
Z pomiarów
Z oblicze
ń
U
n
T
I
R
I
s
I
T
P
RS
P
TS
P
el
cos
ϕϕϕϕ
P
mech
ηηηη
Lp.
V
obr/min Nm
A
A
A
W
W
W
-
W
%
Moc mechaniczn
ą
obliczy
ć
z zale
ż
no
ś
ci
60
2
n
T
P
mech
⋅
π
⋅
⋅
=
moc użyteczna
TS
RS
el
P
P
P
+
=
moc elektryczna
ś
r
N
el
I
U
P
⋅
⋅
=
ϕ
3
cos
współczynnik mocy
1
1
n
n
n
s
−
=
poślizg
%
100
el
mech
P
P
=
η
sprawność
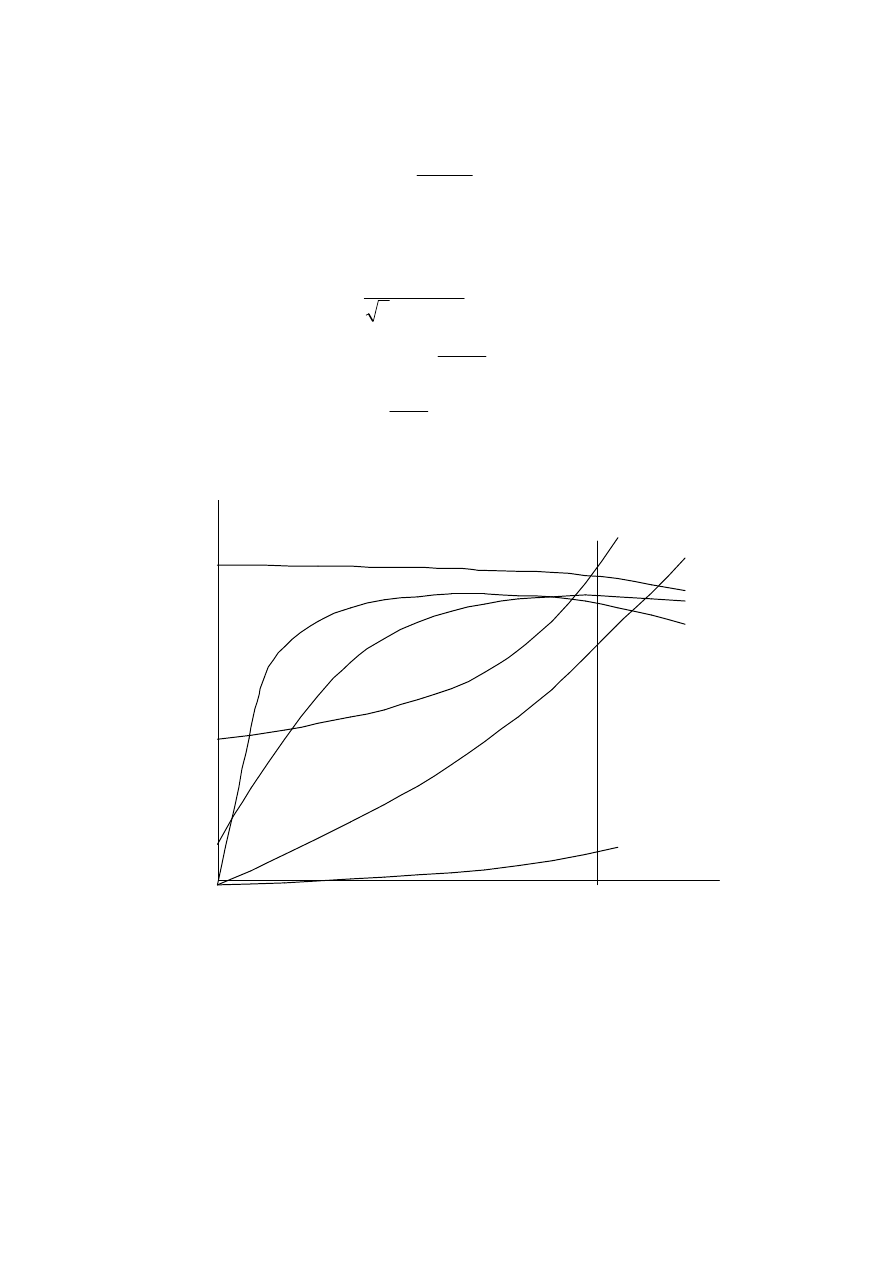
Wyniki przedstawi
ć
na wykresach. Przykładowe przebiegi przedstawiono na rysunku 2.
I
,
η
,
cos
ϕ
,
T
,
s
,
n
cos
ϕ
P
N
0
P
2
η
I
n
T
s
U
=
U
n
f
=
f
n
Rys.2. Charakterystyki obci
ąż
enia silnika indukcyjnego klatkowego
4. Wyznaczanie charakterystyk mechanicznych n(T) silnika dla kilku
cz
ę
stotliwo
ś
ci napi
ę
cia zasilaj
ą
cego f
1
przy
const
/
1
1
=
f
U
w zakresie
obci
ąż
e
ń
, dla których pr
ą
du I nie przekracza warto
ś
ci znamionowej I
n
Krótki opis energoelektronicznych układów sterowania.

W napędach urządzeń przemysłowych wykorzystuje się różnorakie odmiany układów
przekształtnikowych, umożliwiających regulację prędkości i momentu obrotowego oraz sterowanie
procesami rozruchu, hamowania i nawrotu silnika. Do tego celu najczęściej wykorzystywane są:
-
tyrystorowe regulatory napięcia przemiennego;
-
bezpośrednie przemienniki częstotliwości;
-
tyrystorowe kaskady podsynchroniczne;
-
przemienniki częstotliwości pośrednie z falownikami napięcia i prądu.
Tendencje rozwojowe w tej grupie układów polegają na wprowadzeniu przyrządów w pełni
wyłączalnych i zastosowaniu sterowania PWM (Pulse Width Modulation – modulacja szerokości
impulsów). Umożliwia to zmniejszenie zniekształceń napięcia i prądu silnika, eliminacje
niekorzystnych harmonicznych niskiego rzędu w prądzie pobieranym z sieci oraz pracy układu przy
współczynniku mocy (cos
ϕ
) bliskim jedności.
Napędy asynchroniczne z tyrystorowymi regulatorami napięcia (tzw. sterownikami tyrystorowymi)
ze względu na małą sprawność i duże zniekształcenia prądu są stosowane w ograniczonym zakresie
do regulacji silników, a znacznie częściej w układach rozruchowych napędów średniej i dużej
mocy.
Układy z falownikami napięcia znajdują ostatnio coraz szersze zastosowanie zarówno w napędach
przemysłowych małej i średniej mocy (do 1000 kW), jak również w serwonapędach obrabiarek i
robotów przemysłowych zastępując często dotychczas wykorzystywane napędy z silnikami prądu
stałego. Rozwiązaniem dominującym w tej grupie układów są falowniki napięcia z modulacją
PWM, wyposażone w przyrządy półprzewodnikowe mocy w pełni wyłączalne. W przeważającej
liczbie układów są stosowane tranzystory BJT i IGBT, a tyrystory GTO tylko w układach
większych mocy. Coraz częściej w pośrednich przemiennikach częstotliwości z tymi falownikami
stosuje się na wejściu przekształtniki prądu przemiennego na prąd stały, również z modulacją
PWM. Umożliwiają one pracę przy współczynniku mocy cos
ϕ
=1, pozwalają na dwukierunkowy
przepływ energii i ograniczają zawartość wyższych harmonicznych w prądzie pobieranym z sieci
zasilającej. Układy z falownikami prądu zarówno o komutacji wewnętrznej, jak i zewnętrznej (w
postaci tzw. silnika przekształtnikowego) mają dotychczas dość ograniczony zakres zastosowania.
„Miękki” rozruch silnika indukcyjnego.
Jeżeli rozruch silnika indukcyjnego jest przeprowadzany przez bezpośrednie przyłączenie do
napięcia sieci, to prąd rozruchu jest ograniczony tylko impedancją w stanie spoczynku i może
osiągać bardzo duże wartości, większe niż 6-cio krotna wartość prądu znamionowego. W miarę
wzrostu prędkości obrotowej prąd maleje, ale niemal przez cały czas trwania rozruchu jest większy
od prądu znamionowego, co może powodować zakłócenia sieci zasilającej i w innych
przyłączonych do niej odbiorników. Stosowane często urządzenia rozruchowe takie, jak
przełączniki gwiazda/trójkąt lub autotransformatory z zaczepami nie są najlepsze, gdyż przy
przełączaniu występuje bardzo duży chwilowy wzrost prądu i momentu, powodując narażenia
mechaniczne przekładni zębatych, pasowych, wałów oraz innych elementów napędu, szczególnie
gdy załączenie odbywa się przy znamionowym obciążeniu. Najbardziej pożądany jest układ
umożliwiający płynną regulację napięcia silnika, tzw. układ „miękkiego rozruchu”.
Wyróżnia się następujące metody ograniczenia prądu rozruchu:
-
przełącznik gwiazda/trójkąt;
-
załączenie dodatkowego rezystora rozruchowego;
-
regulacja amplitudy napięcia zasilającego;
-
rozruch częstotliwościowy.
Regulacja prędkości obrotowej silnika indukcyjnego.
Regulację poślizgu, a więc także regulację prędkości silnika można zrealizować zarówno przez
zmianę napięcia stojana, jak również przez włączenie dodatkowych rezystancji w obwód wirnika
silnika pierścieniowego i zmianę poślizgu krytycznego. Oba sposoby są stosowane obecnie rzadko
ze względu na duże straty, proporcjonalne do poślizgu silnika.
Natomiast zastosowanie układów kaskadowych, umożliwiających zwrot energii poślizgu do
ź
ródła zasilania, zapewnia dość korzystny sposób regulacji prędkości, ale w niezbyt szerokim
zakresie.
Najkorzystniejszą metodą regulacji prędkości obrotowej silnika indukcyjnego jest tzw. regulacja
częstotliwościowa, polegająca na zmianie częstotliwości napięcia zasilającego silnik przy
równoczesnej zmianie wartości skutecznej napięcia. Regulację taką umożliwiają urządzenia
energoelektroniczne – przemienniki częstotliwości bezpośrednie lub pośrednie z falownikami
napięcia i prądu.
Moment obrotowy silnika indukcyjnego wynika z poniżej przedstawionego wzoru:
.
sin
β
⋅
⋅
ϕ
=
i
T
moment ten jest największy, gdy wektory pola wirnika i stojana są przesunięte względem siebie o
kąt
Π
/2. Zapewnia to najkorzystniejsze warunki pracy silnika, tzn. najmniejsze moduły strumieni
stojana i wirnika, przy tym samym momencie obciążenia lub inaczej – najmniejszy poślizg przy
tym samym momencie obrotowym i strumieniu stojana. Pracę silnika w takich warunkach
umożliwia regulacja zorientowaną polowo, którą realizują falowniki nowego typu, np. SJ100.
Gdy prędkość silnika indukcyjnego jest większa od prędkości synchronicznej (
ω
=2*
Π
*f
1
) silnik
pracuje jako prądnica, przetwarza energię mechaniczną na elektryczną i może ją oddawać do źródła
zasilania. W przypadku zasilania z falownika o regulowanej częstotliwości tę właściwość silnika
można wykorzystać do jego hamowania aż do uzyskania prędkości obrotowej równej zeru.
Straty elektryczne w silniku indukcyjnym to straty w stojanie zależne od kwadratu wartości
skutecznej prądu pobieranego ze źródła:
2
1
1
1
1
I
R
m
P
Cu
⋅
⋅
=
∆
oraz straty w wirniku proporcjonalne do poślizgu silnika. Przy niesinusoidalnych przebiegach
napięć i prądów, co zwykle występuje przy współpracy silników z przekształtnikami
energoelektrycznymi, występują straty dodatkowe spowodowane wyższymi harmonicznymi.
Tabela pomiarowa
Wzory do obliczeń jak wyżej:
Na podstawie wyników wykreśla się charakterystyki:
η
, P, I, cos
ϕ
, n = f(T)
Z pomiarów
Z oblicze
ń
U
n
T
I
R
I
s
I
T
P
RS
P
TS
P
el
cos
ϕϕϕϕ
P
mech
ηηηη
Lp.
V
obr/min Nm
A
A
A
W
W
W
-
W
%
Wyszukiwarka
Podobne podstrony:
Badanie trojfazowego silnika klatkowego
Badanie właściwości dynamicznych i rozruchowych trójfazowego silnika klatkowego, SGGW TRiL, Elektrot
Badanie właściwości dynamicznych i rozruchowych trójfazowego silnika klatkowego(1), SGGW TRiL, Elekt
Badanie trójfazowego silnika asynchronicznego klatkowego
Badanie trójfazowego silnika asynchronicznego klatkowego(1), SGGW TRiL, Elektrotechnika Tril Sggw
Badanie trójfazowego silnika indukcyjnego pierscieniowego
Badanie 3-fazowego silnika klatkowego, Polibuda, IV semestr, SEM IV, Maszyny Elektryczne. Laboratori
dane znamionowe, Szkoła, Politechnika 1- 5 sem, chomikuj, 4 sem (graviora), Badanie trójfazowego sil
Badanie silnika indukcyjnego pierścieniowego - i, Szkoła, Politechnika 1- 5 sem, chomikuj, 4 sem (gr
Ćwiczenie 9 - Badanie asynchronicznego silnika klatkoweg o, UTP-ATR, Elektrotechnika i elektronika
Badanie silnika indukcyjnego pierścieniowego - e, Szkoła, Politechnika 1- 5 sem, chomikuj, 4 sem (gr
Badanie silnika indukcyjnego pierścieniowego - d, Szkoła, Politechnika 1- 5 sem, chomikuj, 4 sem (gr
Badanie trójfazowego silnika elektrycznego zasilanego przez?lownik
Badanie 3 – fazowego silnika indukcyjnego pierścieniowego yogi, Szkoła, Politechnika 1- 5 sem, chomi
Badanie 3 fazowego silnika klatkowego gwiazda trojkat
Badanie 3 fazowego silnika klatkowego gwiazda trojkat
Badanie silnika klatkowegoNASZE
więcej podobnych podstron