
W s t ę p - W
TEORIA BŁEDÓW POMIARÓW
1. Wiadomości z podstaw metrologii
Pomiarem nazywa się czynności doświadczalne mające na celu wyznaczenie wartości wiel-
kości badanej. Istotą każdego pomiaru jest porównanie wartości mierzonej z wzorcem miary
tej wielkości.
Metoda pomiarowa to zastosowany podczas pomiaru sposób porównania. Istnieje wiele me-
tod pomiarowych różniących się sposobem postępowania i zastosowanymi środkami. Zawsze
jednak do wykonania pomiaru, tj. określenia stosunku wartości mierzonej do wartości przyję-
tej za jednostkę miary niezbędne jest:
-
określenie jednostki miary oraz
- posiadanie odpowiedniego narzędzia pomiarowego.
Podstawowy podział metod pomiarowych to podział na:
- metody bezpośrednie, w których zastosowany miernik: reaguje wprost na wartość
wielkości mierzonej i wynik pomiaru otrzymuje się bezpośrednio z odczytu jego
wskazań, bez wykonywania jakichkolwiek obliczeń. Przykładami pomiarów bezpo-
średnich są pomiary: długości za pomocą linijki, czasu za pomocą stopera, napięcia
za pomocą woltomierza, temperatury za pomocą termometru itp.
- metody pośrednie, w których występuje konieczność wyliczenia wartości wielkości
mierzonej X na podstawie bezpośrednich pomiarów innych wielkości A,D,C,D
związanych z nią znaną zależnością funkcyjną f, tzn. gdy:
X = f ( A , B , C , D ).
Przykładami pomiarów pośrednich są: wyznaczenie przyśpieszenia ziemskiego za pomocą
wahadła matematycznego, wyznaczenie rezystancji za pomocą woltomierza i amperomierza,
wyznaczenie lepkości cieczy metodą Stokesa.
Inny podział metod pomiarowych uwzględnia sposób postępowania podczas pomiaru i rodzaj
zastosowanych narzędzi pomiarowych, z czym wiąże się zwykle osiągalna dokładność wyni-
ku. Rozróżniamy tutaj:
1) Metodę odchyleniową zwaną też bezpośredniego odczytu.
Wartość wielkości mierzonej określa się w niej na podstawie odchylenia wskazówki lub in-
nego wskazania (np. cyfrowego) narzędzia pomiarowego. Podczas pomiaru wzorzec wielko-
ści mierzonej nie występuje bezpośrednio, natomiast przy produkcji narzędzia pomiarowego
cały szereg wartości wzorcowych został wykorzystany do odpowiedniego wykonania po-
działki (wzorcowanie podziałki). Metoda ta jest najprostsza, najłatwiejsza w zastosowaniu,
daje natychmiastowe wyniki, ale przy wykorzystaniu analogowych narzędzi pomiarowych
jest stosunkowo mało dokładna. Dokładność metody znacznie zwiększyła się z chwilą zasto-
sowania bardzo dokładnych przyrządów cyfrowych.
Niedokładność pomiaru wykonywanego tą metodą wynika głównie z istnienia dopuszczalne-
go błędu systematycznego narzędzia pomiarowego określonego jego klasą dokładności. Na
przykład dla elektrycznych mierników wskazówkowych dopuszczalną wartość błędu bez-
względnego określa zależność:
n
X
100
k
X
=
∆
, (W-1.1)
gdzie: k - klasa dokładności miernika w procentach zakresu pomiarowego, X
n
- zakres po-
miarowy.
P r z y k ł a d:
Za pomocą woltomierza klasy 0,5 o zakresie U = 150 V zmierzono napięcie otrzymując war-
tość U=98,25 V. Dopuszczalny błąd bezwzględny woltomierza wynosi wg wzoru (8.1.1 –
patrz ćw. 8)
V
0,75
V
150
100
0,5
U
=
=
∆
zatem wynik pomiaru należy zapisać następująco:
U=98,25 + 0,75 V,
zaś błąd względny procentowy pomiaru
%
7,6
100%
V
98,25
V
0,75
δ
=
=
.
2) Metoda różnicowa
Metoda różnicowa jest metodą porównawczą, przy której w układzie pomiarowym występuje
wzorzec wielkości o wartości zbliżonej do wartości mierzonej (np. jednowartościowy wzo-
rzec nienastawialny). W tym przypadku bezpośrednio mierzy się różnicę obu wartości, a wy-
nik pomiaru określa się następująco:
∆X
X
X
W
+
=
,
gdzie: X
W
- wartość wzorcowa,
∆X - zmierzona bezpośrednio różnica, z uwzględnieniem jej
znaku.
Ponieważ wartość wzorcowa jest zwykle określona z błędem pomijalnie małym, błąd pomia-
ru wartości X wynika z niedokładności bezpośredniego pomiaru różnicy
∆X.
3) Metoda przez podstawienie
Metoda pomiarowa przez podstawienie jest metodą porównania bezpośredniego. W układzie
pomiarowym musi znajdować się wzorzec wielkości mierzonej o wartościach nastawianych
w szerokich granicach. Podczas pomiaru wartość mierzoną X zastępuje się wartością wzor-
cową X
W
, dobraną w taki sposób, aby skutki (np. odchylenia wskazówki miernika ) wywo-
ływane przez obie wartości były takie same, z czego wynika zależność:
X = X
W
.
Metoda przez podstawienie jest metodą bardzo dokładną, ponieważ praktycznie eliminuje
błędy wprowadzane przez układ porównania. Po wielokrotnym powtórzeniu pomiaru i obli-
czeniu wartości średniej (zminimalizowaniu błędów przypadkowych) błąd wyniku pomiaru
jest praktycznie równy błędowi dopuszczalnemu dla wzorca.
4) Metody zerowe
Metody pomiarowe zerowe są najdokładniejszymi metodami porównania bezpośredniego.
Porównanie wartości mierzonej z wartością wzorcową (lub z zespołem wartości wzorco-

wych) odbywa się w nich za pomocą układu pomiarowego, w którym przez zmianę parame-
trów elementów składowych doprowadza się do zaniku (do zera) napięcia lub prądu w kon-
trolowanej gałęzi układu. Czynność doprowadzania do zaniku tego napięcia lub prądu nazy-
wa się równoważeniem układu, a wskaźnik służący do zaobserwowania tego stanu (np. gal-
wanometr) nazywa się wskaźnikiem równowagi. Dokładność zerowych metod pomiaru jest
bardzo duża, zależy od dokładności wykonania zastosowanych w układzie wzorców oraz od
czułości wskaźnika równowagi. Zastosowanie bardzo dokładnych wzorców oraz zastosowa-
nie wskaźnika równowagi o wysokiej czułości ogranicza błędy systematyczne metody do
wartości pomijalnych wobec błędów przypadkowych. Podczas pomiarów dokładnych wyko-
nuje się zwykle serię pomiarów i statystyczną obróbkę wyniku pomiaru.
Rozróżnia się zerowe metody mostkowe oraz zerowe metody kompensacyjne
Metody mostkowe stosuje się najczęściej do dokładnych pomiarów takich parametrów jak
rezystancja, pojemność i indukcyjność. W zrównoważonym układzie przez obiekt badany
płynie prąd stały lub przemienny.
Metody kompensacyjne służą zwykle do pomiaru napięcia lub do pośredniego pomiaru in-
nych wielkości przetworzonych uprzednio na napięcie. W metodzie kompensacyjnej niezna-
ną wartość napięcia mierzonego U porównuje się z nastawianą dokładnie znaną wartością
wzorcową U
W
, wytworzoną za pomocą kompensatora. Układ pomiarowy doprowadza się do
równowagi przez zmianę wartości U
W
, a w chwili równowagi zachodzi równość:
U = U
W
.
Szczególnie ważną zaletą metod kompensacyjnych jest to, że w chwili zrównoważenia ukła-
du przez obiekt badany nie płynie prąd, nie ma zatem błędu systematycznego metody, wyni-
kającego ze spadku napięcia na rezystancji wewnętrznej obiektu badanego.
Zauważmy, że trzy ostatnie metody są metodami porównawczymi, które same reprezentują
grupę metod stojącą w opozycji do metod bezpośrednich. Wykonując zadane ćwiczenie labo-
ratoryjne proszę zastanowić się do której z omówionych kategorii należy zastosowana tam
metoda pomiarowa.
2. Elementy teorii błędów pomiarów
2.1. Rodzaje błędów
Każde doświadczenie fizyczne wymaga przeprowadzenia oszacowania błędu, którym jest
obarczony wynik tzn. podania z jaką dokładnością dana wielkość została wyznaczona. Bę-
dzie to obowiązywało nas w laboratorium. W postępowaniu tym można wyróżnić trzy etapy:
1) wyznaczenie szukanej wielkości fizycznej,
2) określenie błędu pomiaru,
3) podanie przypuszczalnych przyczyn błędów.
Ogólnie
rozróżniamy:
- błędy grube
wynikłe z nieuwagi i z pomyłek eksperymentatora ( np. przy odczycie lub w
zapisie wyniku). Często są jednorazowe i bardzo duże.
- błędy systematyczne wynikłe ze złego (mało dokładnego) ustawienia samego ekspery-
mentu (nie uwzględnienie pewnych poprawek np. siły wyporu powietrza przy dokład-
nym ważeniu), wad urządzeń pomiarowych (przykładem może być waga dźwigniowa z
przesuniętym punktem zawieszenia, czasomierz wskazówkowy ze środkiem skali nie
pokrywającym się z osią wskazówek czy źle wyskalowane przyrządy), ze stanu ze-

wnętrznych warunków pomiaru (np. zbyt wysoka temperatura w pomieszczeniu) jak i z
błędu eksperymentatora (np. znany błąd paralaksy).
Błąd systematyczny charakteryzuje się stałą lub zmieniającą się według określonego
prawa odchyłką wartości wyznaczanej w doświadczeniu w porównaniu z wielkością
rzeczywistą. Przyczyny błędów systematycznych mogą być poznane i usunięte.
- błędy przypadkowe
wynikłe z niedokładności odczytu, fluktuacji warunków pomiaru, z
nieokreślenia samej mierzonej wielkości fizycznej itp. Błędy te odznaczają się tym, że
w serii pomiarów jednego i tego samego stanu danej wielkości fizycznej wykonywanej
w określonych warunkach, wyniki zmieniają się w sposób losowy (przypadkowy). Nie
można ich uniknąć (usunąć), gdyż nie znamy ich przyczyn.
Wniosek:
Nie można wykonać bezbłędnego wyznaczenia wielkości fizycznej tzw. pomiaru
absolutnie dokładnego.
Rozróżniamy następujące rodzaje błędów pomiarowych ze względu na źródła ich powstania:
a) błędy powodowane przez przyrządy pomiarowe, np. skończona rezystancja we-
wnętrzna woltomierzy, nieliniowość wskazań przyrządów pomiarowych lub niedo-
skonałość ich wzorcowania,
b) błędy powodowane przez metody pomiarowe,
c) błędy powodowane przez mierzącego, np. brak doświadczenia, zmęczenie, skłonno-
ści, nawyki,
d) błędy powodowane przez obliczenia to błędy przy niewłaściwym zaokrągleniu, nie-
właściwe metody wyrównywania błędów,
e) błędy powodowane przez wpływ otoczenia na mierzącego, na przyrządy i na mie-
rzoną wielkość. Czynnikami wywołującymi te błędy to temperatura ciśnienie, wil-
gotność powietrza, zakłócenia elektromagnetyczne.
W laboratorium zakładamy, że nie występują błędy systematyczne. Rachunek błędów bę-
dzie się sprowadzał do określenia błędów przypadkowych.
Znane są pojęcia :
a) błędu bezwzględnego definiowanego jako różnica wyniku X i wartości rzeczywistej X
R
.
R
X
X
X
−
=
∆
b) błędu względnego definiowanego jako stosunku błędu bezwzględnego do wartości rze-
czywistej .
1
X
X
X
∆X
δ
R
R
X
−
=
=
. (W-2.1)
Niemniej pojęcie wartości rzeczywistej jest tu czysto teoretyczne, gdyż praktycznie nie zna-
my jej. Powyższe pojęcia są więc dla nas bezużyteczne.
W oparciu o statystyczną teorię błędów przypadkowych można jednak oszacować przybliżo-
ne wartości tych błędów, a tym samym dokładność otrzymanych wyników pomiarowych. Te
przybliżone wartości błędów noszą nazwę wskaźników dokładności pomiarów.
2.2. Błędy przypadkowe w pomiarach bezpośrednich
2.2.1 Probabilistyczna teoria błędów Gaussa
Z jednego pomiaru nie możemy wnioskować o jego dokładności. Do tego konieczna jest ich
seria. Otrzymujemy ją przez kilkukrotne, niezależne powtórzenie rozpatrywanego pomiaru.
Wyniki w serii będą różnić się losowo. Oznaczmy je X
1
,X
2
,X
3
, ....... X
N
gdzie N jest ilością
powtórzeń pomiaru w serii i powinna wynosić przynajmniej 10. Wartości rzeczywistej nie
znamy. Ale z serii pomiarów wartością najbardziej zbliżoną do wartości rzeczywistej jest
średnia arytmetyczna :
∑
=
=
N
1
i
i
X
N
1
X
(W-2.2)
Jest to podstawowe twierdzenie teorii błędów tzw. pierwszy postulat Gaussa. Wynika ono z
faktu równości prawdopodobieństw tak zawyżenia wielkości mierzonej jak i jej zaniżenia.
Tym samym błędy powinny kompensować się. Jednak przy skończonej ilości pomiarów, mo-
że się zdarzyć, że wyniki nie rozłożą się równomiernie wokół wartości rzeczywistej. Tym
samym wartość średnia X jest jedynie blisko położona wielkości rzeczywistej X
R
, ale nie
równa jej. Zbliżenie to jest tym lepsze im dłuższa jest seria pomiarowa. Równość
R
X
X
=
moglibyśmy napisać tylko dla serii nieskończenie długiej pomiarów, ale przecież wykonanie
takiej serii jest praktycznie niemożliwe.
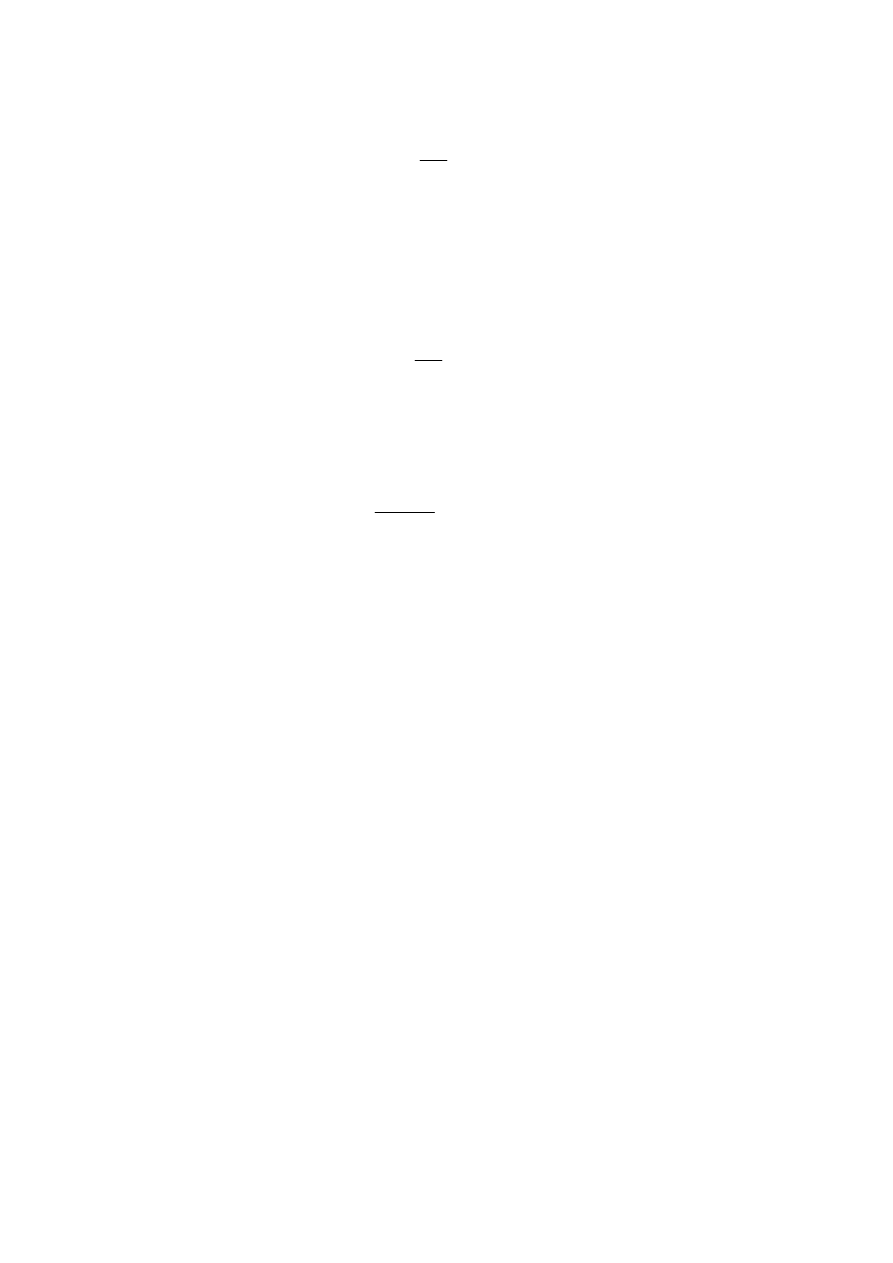
Wyniki pomiarów w serii rozkładają się wokół wartości średniej w tzw. krzywą Gaussa -
mówi się o rozkładzie Gaussa (patrz ćwiczenie nr 1). Aby się o tym przekonać należy zakres
pomiarowy podzielić na przedziały o równej szerokości
∆X i obliczyć ile pomiarów z serii
zmieściło się w każdym z nich (rys. 1). Oczywiście zwiększając N możemy pozwolić sobie
na zmniejszenie szerokości poszczególnych schodków rozkładu, ale nadal zachowa on cha-
rakter dyskretny. Obwiednia dzwonowa poprowadzona po środkach schodków jak na rys. 1
jest pewnym wyidealizowaniem - pokazuje jak rozkład normalny wyglądałby gdyby był
funkcją ciągłą (dla
∞
=
N
). Taka postać łatwiej poddaje się analizie matematycznej i dlatego
często jest stosowana, ale nigdy nie należy zapominać, że realny rozkład normalny ma struk-
turę ziarnistą.
Ciągły rozkład Gaussa jest następującą funkcją matematyczną :
2
2
σ
2
)
X
(X
e
2π
σ
1
P(X)
−
−
=
(W-2.3)
przy czym parametr
σ zwany odchyleniem standardowym określa rozmycie rozkładu wokół
wartości średniej.
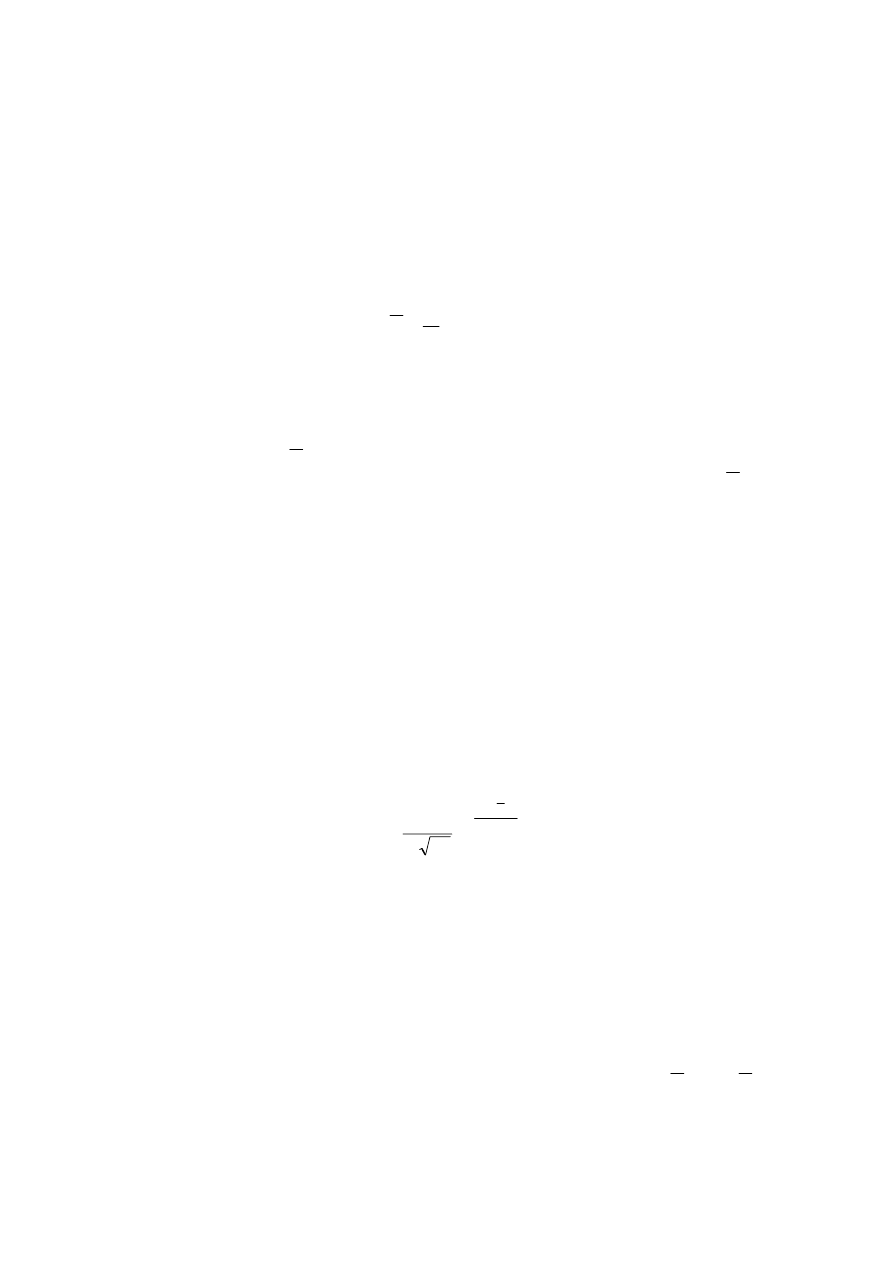
Kształt krzywej Gaussa, zwanej również krzywą dzwonową, bardzo silnie zależy od
odchylenia standardowego
σ . Na rys. 2 pokazano przebiegi krzywej Gaussa dla kilku róż-
nych wartości odchylenia standardowego. Im większe jest odchylenie standardowe, tym bar-
dziej płaska jest krzywa; dla bardzo małych odchyleń standardowych krzywa jest bardzo
stroma i odchylenia od wartości oczekiwanej są bardzo małe. Zauważmy, że na krzywej
Gaussa można wyróżnić obszary o przeciwnie skierowanej krzywiźnie. W okolicy maksi-
mum krzywa jest wypukła, a daleko poza maksimum staje się krzywą wklęsłą. Oczywiście
obszary takie są oddzielone punktami przegięcia. Odpowiadają one punktom
σ
X
i
σ
X
+
−
na osi odciętych.
Rys. 1. Rozkład pomiarów w serii wokół wartości średniej
X
jest rozkładem Gaussa.
Rys. 2. Przebieg krzywej ciągłego rozkładu normalnego w zależności od odchylenia
standardowego . Im większe jest odchylenie standardowe, tym szersza jest krzywa i
bardziej spłaszczona.
Ponieważ rozkład Gaussa opisuje zjawisko probabilistyczne, a więc można określić jedynie
prawdopodobieństwo, że dowolny wynik pomiaru X
i
(i=1,2,3....N) znajdzie się w aktualnie
interesującym nas przedziale wartości < X
a
, X
b
>. I tak np. :
W przedziale
σ
X
,
σ
X
+
−
mieści się 68,26% wyników z serii.
1 2 3 5 6 7 8 9 11 12 13 X
X- X X+
σ
σ
n
i
∆X
f(X)
σ = 0,3
σ = 0,6
σ = 1,4
-2 -1 0 1 2 X
W przedziale
σ
2
X
,
σ
2
X
+
−
mieści się 95,45% wyników z serii.
W przedziale
σ
3
X
,
σ
3
X
+
−
mieści się 99,73% wyników z serii.
Często operuje się prawdopodobieństwem, z jakim w zadanym przedziale znajdzie się do-
wolny pomiar z serii. Prawdopodobieństwo to nazywa się poziomem ufności, a przedział
przedziałem ufności.
Odchylenie standardowe w teorii błędów nazywa się średnim błędem kwadratowym i oblicza
się go z wyrażenia:
1)
(N
)
X
(X
σ
N
1
i
2
i
−
−
=
∑
=
. (W-2.4)
Występujący w tym wyrażeniu czynnik N – 1 można uzasadnić w ten sposób, że ponieważ
część informacji zawartej w serii je X
1
,X
2
,X
3
, ....... X
N
została wykorzystana do określenia
wartości średniej X , uśrednianie związane z odchyleniem standardowym następuje z
mniejszą liczbą punktów swobody i stąd podzielenie przez N – 1 zamiast przez N.
Najczęściej wyznaczany jest jednak jako optymalny średni błąd kwadratowy
σ (wzór W-2.4),
a z niego średni błąd kwadratowy wartości średniej:
σ
σ
X
N
=
(W-2.5)
Łącząc wzory (W.2.4) i (W.2.5) otrzymujemy użyteczne wyrażenie:
σ
X
i
i
N
X
X
N N
=
−
−
=
∑
(
)
(
)
2
1
1
(W-2.6)
Błąd średni kwadratowy jest najważniejszym i najczęściej stosowanym wskaźnikiem
dokładności pomiaru. Dzieje się tak dlatego, że jest to błąd policzony optymalnie - najlepiej z
danej serii pomiarowej.
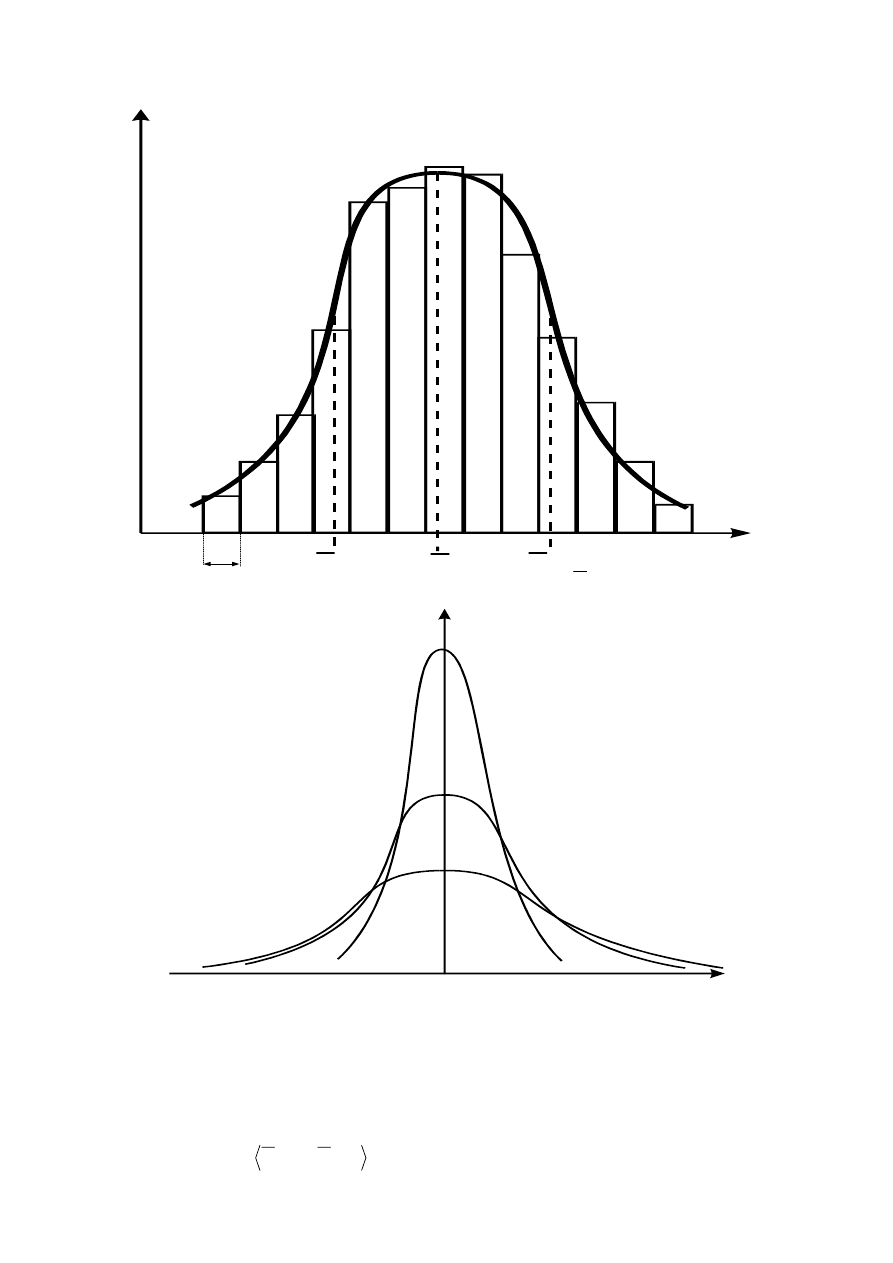
Prawdopodobieństwo, że dany pomiar z serii pomiarowej znajdzie się w przedziale
σ
σ
+
−
X
X
,
wynosi 0,683. W interpretacji graficznej prawdopodobieństwu temu
odpowiada pole pod krzywą Gaussa odcięte tym przedziałem przy założeniu, że pole pod
całą krzywą równa się jeden (rys. 3ab). W eksperymencie oczywiście chcielibyśmy, żeby
błąd wyniku (przedział ufności) był jak najmniejszy przy możliwie dużym wyżej opisanym
prawdopodobieństwie (poziomie ufności).
Analizując kształt krzywej dzwonowej dochodzimy do wniosku, że optymalność przedziału
σ
σ
+
−
X
X
,
wynika z faktu, że jest on wyznaczony przez punkty przegięcia krzywej.
Gdybyśmy chcieli sztucznie zmniejszyć ten przedział ufności do
X d
X d
−
+
,
(rys. 3c),
to znacznie stracimy na poziomie ufności (o pole pod krzywą Gaussa odcięte przedziałami
d
X
X
−
− ,
σ
,
σ
+
+ X
d
X
,
, które jest duże, bo na tych odcinkach krzywa dzwonowa jest
wypukła). Gdybyśmy z kolei chcieli sztucznie podnieść poziom ufności (rys. 3d), to jest to
możliwe tylko przez znaczne poszerzenie tego przedziału ufności do
X c X c
−
+
,
, gdyż
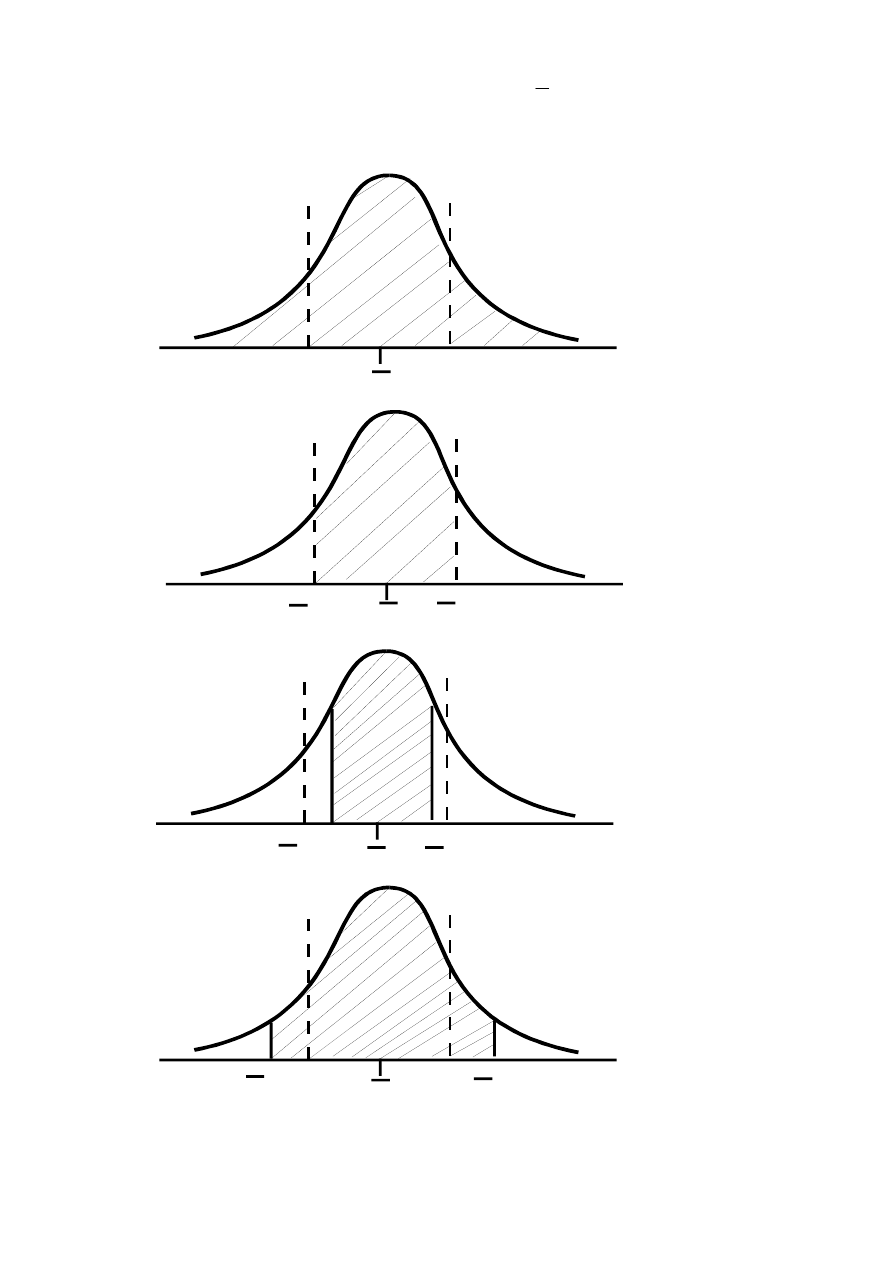
pola pod krzywą w przedziałach oddalonych od średniej
X
dalej niż o
σ wnoszą już mały
wkład do poziomu ufności (krzywa jest tu wklęsła).
Rys. 3. Interpretacja graficzna przedziałów ufności i poziomów ufności p. oraz
współzależność między nimi.
(X -
X +
0,674 σ ,
0,674 σ)
X
X-
X
X+
σ
σ
X-d
X
X+d
X-c
X
X+c
(X -
X +
σ ,
σ)
(X -
X +
1,65 σ ,
1,65 σ)
p = 0,683
p = 0,5
p = 0,9
p = 1
a)
b)
c)
d)
cały zakres X
2.2.2. Błędy przypadkowe w pomiarach pośrednich
Załóżmy, że chcemy wyznaczyć pewną wielkość fizyczną A, ale nie możemy jej zmierzyć
bezpośrednio. Wiemy natomiast, że jest ona związana z K innymi wielkościami fizycznymi
X
1
, X
2
,...X
K ,
które można już zmierzyć bezpośrednio, następującą zależnością:
A
f X
X
X
K
= (
,
, .... ,
)
1
2
(W-2.7)
Po wykonaniu pomiarów wyniki i błędy pomiarowe wielkości X
1
, X
2
,...X
K
są znane i
wynoszą odpowiednio:
X
X
1
1
± ∆
X
X
2
2
± ∆
.................
................. (W-2.8)
X
X
K
K
± ∆
Wynikową wartość wielkości A łatwo jest znaleźć z zależności (W-2.7) :
)
X
,....,
X
,
X
f(
A
K
2
1
=
. (W-2.9)
Podstawowe pytanie brzmi jakim błędem
∆A
obarczony jest w ten sposób otrzymany
wynik.
Można zaproponować następujące metody postępowania:
1.
Jeżeli
∆X
i
( i = 1,2,...,K ) są średnimi błędami kwadratowymi
σ
X
i
wartości
średnich
X
i
, to otrzymujemy optymalnie znaleziony średni błąd kwadratowy z wyrażenia:
2
2
2
2
1
....
2
1
+
+
+
=
K
i
X
K
X
X
A
X
A
X
A
X
A
σ
∂
∂
σ
∂
∂
σ
∂
∂
σ
. (W-2.10)
Prawdopodobieństwo znalezienia się rzeczywistej wartości wielkości fizycznej A
R
w
przedziale
A
A
A
A
−
+
σ
σ
,
wynosi 0,683.
2.
Jeżeli błędy
∆X
i
są błędami granicznymi (maksymalnymi)
max
i
X
∆
, to w najmniej
korzystnym przypadku otrzymujemy błąd maksymalny pomiaru:
∆
∆
∆
∆
A
A
X
X
A
X
X
A
X
X
gr
K
K
=
+
+ +
∂
∂
∂
∂
∂
∂
1
1
2
2
max
max
max
...
. (W-2.11)
Prawdopodobieństwo znalezienia wartości rzeczywistej A
R
w przedziale
A
A
A
A
gr
gr
−
+
∆
∆
,
wynosi 0,999.
3.
Jeżeli błędy
∆X
i
są błędami granicznymi (maksymalnymi)
max
i
X
∆
to w
najbardziej prawdopodobnym przypadku (optymistyczniejszym w porównaniu z
przypadkiem poprzednim) otrzymamy nieco mniejsze prawdopodobieństwo (w przybliżeniu
0,95) znalezienia wartości rzeczywistej A
R
, ale i w mniejszym przedziale ufności:
S
A
X
X
A
X
X
A
X
X
A
K
K
=
+
+
+
∂
∂
∂
∂
∂
∂
1
1
2
2
2
2
2
∆
∆
∆
max
max
max
....
(W-2.12)
Jest to tzw. metoda różniczki zupełnej stosowana często, gdy błędy
max
i
X
∆
są błędami
szacowanymi przy pomiarach jednorazowych, np. na podstawie dokładności skali przyrządu
pomiarowego, a zależy nam na zminimalizowaniu błędu na wyniku końcowym.
Prawidłowo przeprowadzony rachunek błędów, automatycznie odpowiada na pytania:
- które wielkości fizyczne (pośród X
i
) należy zmierzyć z większą dokładnością,
jeśli chce się uzyskać mniejszy błąd na wielkości wynikowej A;
- który z błędów
∆X
i
wnosi największy wkład do błędu
∆A
.
Otrzymane wnioski są więc ważne i pouczające, pozwalające na efektywniejsze ewentualne
powtórzenie doświadczenia.
P r z y k ł a d:
Wahadło matematyczne o długości l = 100
±1 cm posiada okres wahań T = 2,00 ± 0,02 s.
Wyznaczone błędy są średnimi błędami kwadratowymi. Należy obliczyć przyspieszenie
ziemskie. Ponieważ
g
T
l
π
2
=
to
g
T
m
s
m s
=
=
=
4
4
1
2
9 87
2
2
2
2
2
π
π
l
( )
,
/
.
Zgodnie z wzorem (W-2.10) średni błąd kwadratowy przyspieszenia ziemskiego wynosi:
σ
π
σ
π
σ
g
T
T
=
+ −
4
4
2
2
2
2
3
2
l
l
T
,
σ
π
π
g
s
m
s
s
=
+ −
4
2
0 01
4
2
0 02
2
2
2
2
3
2
( )
,
( )
,
1m
,
[
] [
]
σ
g
m s
m s
m s
=
+
=
+
0 1
0 2
0 01 0 04
2 2
2 2
2
,
/
,
/
,
,
/
,
σ
g
m s
= 0 224
2
,
/
.
Widzimy, że błąd wynikający z dokładności pomiaru czasu jest decydujący o dokładności
wyznaczenia przyspieszenia. Po zaokrągleniu błędu do dwóch cyfr znaczących końcowy
wynik ma postać
g = 9,87
± 0,23 m/s
2
lub po zaokrągleniu do jednego miejsca znaczącego
g = 9,9
± 0,3 m/s
2
.
Uwaga:
wartość błędu zaokrąglamy zawsze w górę.
W wielu wypadkach mamy doczynienia z zależnością typu
d
4
c
3
b
2
a
1
X
X
X
X
A
=
. (W-2.13)
Jeśli chcemy teraz policzyć błąd graniczny
gr
A
∆
, wówczas zamiast korzystać z procedury
(W-2.11) łatwiej jest najpierw obliczyć błąd graniczny względny wzorem:
4
4
3
3
2
2
1
1
gr
X
X
∆
d
X
X
∆
c
X
X
∆
b
X
X
∆
a
A
A
∆
+
+
+
=
(W-2.14)
a potem dopiero błąd graniczny bezwzględny:
A
A
A
∆
A
∆
gr
gr
=
.
3. Metoda najmniejszych kwadratów
Szeroko stosowaną w fizyce metodą analizy wyników pomiarów jest metoda najmniejszych
kwadratów. Omówimy tutaj tzw. regresję liniową, tzn. metodę rozwiązania problemu , który
jest postawiony następująco.
Załóżmy, że z doświadczenia uzyskaliśmy n par wyników x
i
, y
i
. Z teorii wiemy że wielkości
x i y są liniowo ze sobą związane. Dążymy do tego, aby wykorzystując te punkty pomiarowe
poprowadzić prostą najlepiej oddającą charakter zależności. Gdy dwie wielkości x i y są
zależne od siebie liniowo, wówczas spełniają zależność:
b
x
a
y
+
=
.
Jeżeli tę zależność przedstawimy graficznie, to otrzymamy linię prostą o nachyleniu a,
przecinającą oś rzędnych y w punkcie b. Załóżmy, że na skutek jakiegoś procesu ulega
zmianie x oraz y. Wykonujemy n pomiarów uzyskując n par wyników (x
i
, y
i
). Jeżeli między
punktami pomiarowymi poprowadzimy linię prostą opisaną zależnością:
b
x
a
y
i
i
+
=
/
(W-3.1)
gdzie
b
oraz
a
to parametry uzyskanej prostej.
Obliczona w ten sposób wartość
/
i
y
nie jest równa wartości
i
y
. Ta rozbieżność wynika z
błędów pomiarowych i można określić zależnością:
i
i
i
i
y
b
x
a
y
y
−
+
=
−
/
.
(W-3.2)
Metoda najmniejszych kwadratów polega na dobraniu takich wartości
b
i
a
, żeby suma
kwadratów odchyleń :
i
i
y
y
−
/
po wszystkich pomiarach posiadała wartość minimalną. Stąd
nazwa metody. Zatem:
minimum
)
(
2
/
1
=
−
∑
=
i
i
n
i
y
y
.
(W-3.3)
Podstawienie (W-3.2) do (W-3.3) daje:
minimum
)
(
2
1
=
−
+
∑
=
i
i
n
i
y
b
x
a
.
Poszukujemy takich wartości
b
a
, , które spełniłyby powyższy warunek., a będzie spełniony
wtedy, gdy pochodne cząstkowe równania:
2
1
)
(
i
i
n
i
y
b
x
a
f
−
+
=
∑
=
względem
i
b
i
a
będą równocześnie równe zeru. Zatem uzyskuje się układ równań:
0
)
(
2
1
=
−
+
∑
=
i
i
n
i
i
y
b
x
a
x
,
0
)
(
2
1
=
−
+
∑
=
i
i
n
i
y
b
x
a
,
czyli
∑
∑
∑
=
=
=
=
−
+
n
i
n
i
i
i
n
i
i
i
y
x
x
b
x
a
1
1
1
2
0
2
2
2
,
∑
∑
=
=
=
−
+
n
i
n
i
i
i
y
b
n
x
a
1
1
0
2
2
2
.
Z pomiarów znamy wartości x
i
, y
i
, zatem ich sumy są łatwe do obliczenia. Jest to układ
dwóch równań z których wyznaczamy
a oraz b :
∑
∑
∑
∑
∑
=
=
=
=
=
−
−
=
n
i
i
n
i
i
n
i
i
i
n
i
i
n
i
i
x
n
x
y
x
n
y
x
a
1
2
2
1
1
1
1
)
(
,
(W-3.4)
∑
∑
∑
∑
∑
∑
=
=
=
=
=
=
−
−
=
n
i
i
n
i
i
n
i
i
n
i
i
n
i
i
i
n
i
i
x
n
x
x
y
y
x
x
b
1
2
2
1
1
2
1
1
1
. (W-3.5)
Można wykazać, że odchylenie standardowe wartości średnich
a oraz b wyrażają się
wzorami:
∑
∑
∑
=
=
=
−
−
=
n
i
n
i
i
n
i
i
i
a
x
x
n
n
n
1
2
1
1
2
2
2
1
ε
σ
, (W-3.6)
∑
∑
∑
∑
=
=
=
=
−
−
=
n
i
n
i
i
n
i
i
n
i
i
i
b
x
x
n
x
n
1
2
1
1
2
1
2
2
2
1
ε
σ
,
(W-3.7)
gdzie:
∑
∑
∑
∑
=
=
=
=
−
−
=
n
i
n
i
n
i
i
i
i
n
i
i
i
y
b
y
x
a
y
1
1
1
1
2
2
ε
. (W-3.8)
Opisaną tu metodę obliczania nachylenia a i rzędnej b przecięcia prostej z osią y oraz
odchyleń standardowych
a
σ
oraz
b
σ
nazywamy metodą regresji liniowej.
Prostą o nachyleniu a przecinającą oś y w punkcie b opisana jest równaniem:
b
x
a
y
+
=
(W-3.9)
i nazywać będziemy ją linią teoretyczną, która jest rezultatem najlepszego uśrednienia
wyników. Jest więc najlepiej poprowadzoną prostą po punktach eksperymentalnych tzn. jest
najbardziej prawdopodobną prostą wśród możliwych do wyznaczenia z danych
doświadczalnych. Istotne jest, że parametrów a i b nie musimy wyznaczać z wykresu z
czym zwykle są związane duże błędy, lecz obliczamy je wprost z rezultatów pomiarów.
Wykonując wykres możemy najpierw nanieść linię teoretyczną, a dopiero później same
punkty pomiarowe (rys. 4). Łatwo zauważyć, że otrzymany wynik ma tę właściwość, że
suma odchyłek
i
i
i
y
y
y
−
=
∆
/
punktów eksperymentalnych od prostej jest równa zeru tzn.
(
)
∑
=
=
−
n
i
i
i
y
y
1
/
0
.
Można powiedzieć, że prosta przechodzi dokładnie pomiędzy punktami eksperymentalnymi.
Przy stosowaniu tej metody należy upewnić się (np. na podstawie teorii badanego zjawiska),
czy wartości x, y są zależne liniowo. Jeżeli tak nie jest, to opisana metoda nie może być
stosowana.
Metodę regresji liniowej możemy stosować także do zależności dających się sprowadzić za
pomocą odpowiednich przekształceń matematycznych do zależności liniowych. Na przykład
w ruchu jednostajnie przyspieszonym droga i czas spełniają związek: s=0.5 at
2
, w którym
liniowo są zależne wielkości: s oraz t
2
. Zatem można zastosować przedstawioną metodę
przez podstawienie: y=s zaś x=t
2
.
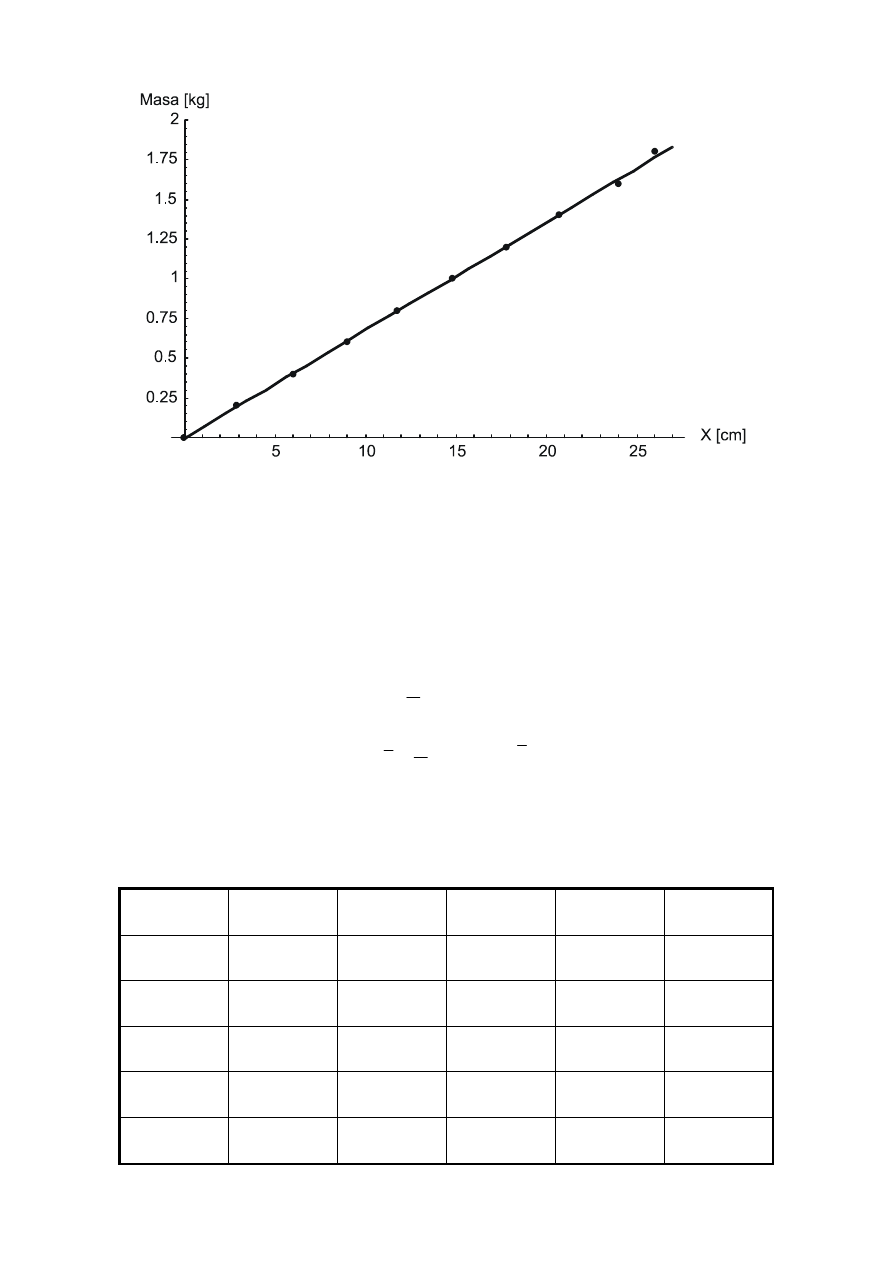
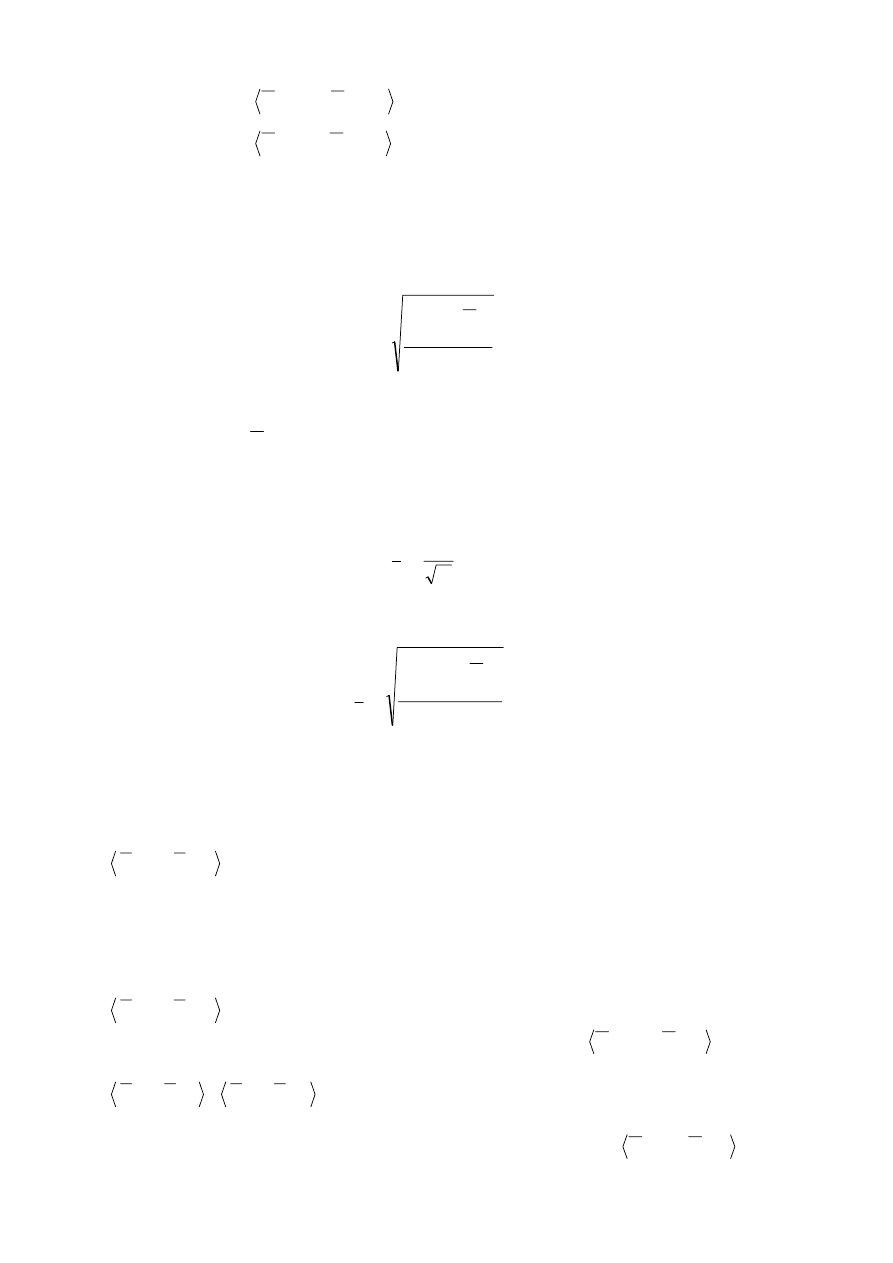
Rys. 4. Wynik regresji liniowej przeprowadzonej na wynikach podanych w przykładzie
P r z y k ł a d:
Dokonano pomiaru zależności wydłużenia x sprężyny od obciążającej ją masy m. Te dwie
wielkości wiąże zależność:
x
k
g
m
=
,
zakładając y = m otrzymujemy:
x
g
k
y
=
.
Jest to równanie prostej o nachyleniu
g
k
a
=
, dla której
0
=
b
.
Otrzymane punkty eksperymentalne badanej zależności
)
,
(
i
i
y
x
oraz obliczenia
pomocnicze są zestawione w Tabeli W3.1
Tabela W3.1
punktu
Nr
i
x
i
y
i
i
y
x
2
i
x
2
i
y
1 0 0 0 0 0
2 2,9 0,2 0,58 8,41 0,04
3
6,0 0,4 2,40 36,00 0,16
4
9,0 0,6 5,40 81,00 0,36
5 11,80 0,8 9,44 139,24 0,64
6 14,80 1,0 14,80
219,040
1,00
7 17,80 1,2 21,36
316,840
1,44
8 20,70 1,4 28,98
428,50
1,96
9 24,00 1,6 38,40
576,00
2,56
10 26,00 1,8 46,80 676 3,24
∑
=
=
10
1
i
133
9,0
168,16
2481
11,40
Zastosowanie tabelki ułatwia przeprowadzenie obliczeń. Wykonano 10 pomiarów (n = 10).
W ostatnim wierszu wypisane są obliczone potrzebne sumy tzn.:
133
1
=
∑
=
n
i
i
x
9
1
=
∑
=
n
i
i
y
16
,
168
1
=
∑
=
n
i
i
i
y
x
2481
1
2
=
∑
=
n
i
i
x
4
,
11
1
2
=
∑
=
n
i
i
y
Wstawiając je do wzorów (W-3.4) i (W-3.5) otrzymujemy:
cm
kg
a
/
0680
,
0
=
kg
b
005
,
0
−
=
Następnie ze wzoru (W-3.8):
2
10
1
2
011
,
0
kg
i
i
=
∑
=
ε
aby móc zastosować wzory (W-3.6), (W-3.7):
Co daje w konkluzji:
cm
kg
a
/
0014
,
0
=
σ
kg
b
022
,
0
=
σ
Końcowy efekt obliczeń można przedstawić w postaci wykresu zaznaczając na nim punkty
eksperymentalne oraz prostą (W-3.9) (patrz rys.4).
Wyszukiwarka
Podobne podstrony:
teoria bledow 2
Obliczanie błędów pomiarowych metoda różniczki zupelnej
teoria bledow
Metrologia-lab-Ocena błędów pomiaru pośredniego, OC BL S, POLITECHNIKA RADOMSKA
Dodatkowe nr 1 (1), sem II, Podstawy Technologii Okrętów - Wykład.Laboratorium, Laboratorium nr 1 (1
teoria bledow ppt
Metrologia-lab-Ocena błędów pomiaru pośredniego, OcEdPrt, POLITECHNIKA RADOMSKA
Teoria błędów
31 Scharakteryzować źródła błędów pomiarów GPS oraz metody eliminacji lub minimalizacji ich wpływu
Kompendium teoria bledow
Analiza błędów pomiaru
Sprawozdanie nr 1 (1), sem II, Podstawy Technologii Okrętów - Wykład.Laboratorium, Laboratorium nr 1
Analiza błędów pomiaru
Teoria błędów, !!!Uczelnia, fizyka, kolos
rachunek bledow pomiarowych poglądowo
3 Podstawy Metrologii teoria błędów
TEORIA BŁĘDÓW
więcej podobnych podstron