1
ELEMENTY TEORII BŁĘDÓW
2
Informacje ogólne
Każdy pomiar wielkości fizycznej dokonywany jest ze
skończoną dokładnością co oznacza że wynik każdego
pomiaru dokonywany jest z niepewnością pomiarową
zwaną błędem pomiaru. Zasady obliczania jak również
ocena błędów zawarte są w teorii błędów zwanej
rachunkiem błędów.
Wykonanie bezbłędnego pomiaru jest niemożliwe dlatego
rzeczywistej wielkości pomiarowej nie poznamy nigdy.
Wartość pomierzoną możemy zapisać: X = X
np
+ m
x
np – najbardziej prawdopodobny
3
Rodzaje błędów
Błędy pomiarowe dzielą się na trzy zasadnicze grupy:
•
błędy grube (omyłki),
•
błędy systematyczne,
•
błędy przypadkowe.
Rachunek wyrównawczy zajmuje się jedynie błędami
przypadkowymi.
Błędy grube i systematyczne należy wyeliminować
przed wyrównaniem wyników pomiarów.
4
Błędy grube i systematyczne
Błędy grube to poważne odchylenia wyników
pomiarów od wartości rzeczywistej mierzonej
wielkości, powstają na skutek nieuwagi, pośpiechu.
Wykrywa się je i eliminuje z pomiarów przez
kilkakrotne obserwacje tej samej wielkości.
Błędy systematyczne mają te same znaki, a
czasami nawet te same wartości. Zdarza się, że
wzrastają one proporcjonalnie do mierzonej
wielkości. Źródłem tych błędów jest najczęściej
niedoskonałość narzędzi pomiarowych.
5
Błędy przypadkowe
Błędy przypadkowe obarczają wszystkie pomiary.
Najczęściej spowodowane są one niedoskonałością
wzroku obserwatora. Mają one niewielkie wartości,
są nieuchwytne i mają różne znaki. Przyczyny ich
powstania są przypadkowe i zmienne, zatem ich
wartości i znaków nie można przewidzieć. Nie da
się ich wyeliminować zupełnie, można jednak
osłabić ich wpływ przez wykonanie pomiarów
nadliczbowych i wyrównanie wyników pomiarów.
6
Wartość najbardziej prawdopodobna – średnia
arytmetyczna
n
]
l
[
n
l
...
l
l
x
n
2
1
l
1
, l
2
, ... – spostrzeżenia
n – ilość spostrzeżeń
Błąd prawdziwy – różnica między wartością
prawdziwą X a i-tą wartością obserwowaną l
i
i
i
l
X
Spostrzeżenia bezpośrednie jednakowo
dokładne
7
Błąd pozorny – różnica między średnią
arytmetyczną x a i-tą wartością obserwowaną l
i
.
i
i
l
x
v
0
[l]
–
[l]
l]
[
x
n
]
v
[
Własność pierwsza:
Własność druga:
min.
]
vv
[
Na drugiej własności opiera się stosowana w
rachunku wyrównawczym „metoda najmniejszych
kwadratów” opracowana przez Gaussa.
Spostrzeżenia bezpośrednie jednakowo
dokładne
8
Błąd średni pojedynczego spostrzeżenia:
• wyrażony przez błędy prawdziwe
• wyrażony przez błędy pozorne
Błąd średni średniej arytmetycznej (wartości
wyrównanej):
n
]
[
m
1
-
n
[vv]
m
1
-
n
n
[vv]
n
m
M
Spostrzeżenia bezpośrednie jednakowo
dokładne
9
997
,
0
g
g
-
P
683
,
0
m
m
-
P
5
,
0
r
r
-
P
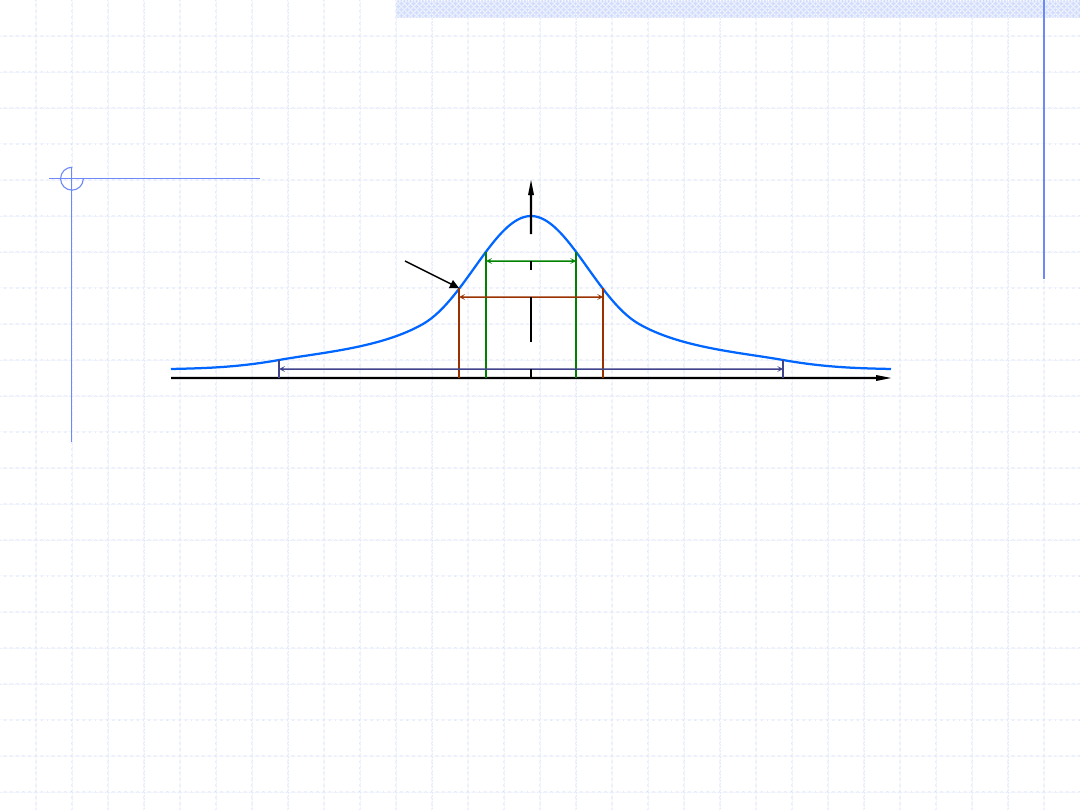
Prawdopodobieństwa popełnienia błędu prawdziwego
pomiaru w granicach błędów:
• granicznego (g=3m)
• średniego
• prawdopodobnego
68,3 %
50 %
99,7 %
- m
m
- g
g
- r
r
y
punkt przegięcia
krzywej
Krzywa błędów Gaussa
10
Błąd względny
Definicja podaje, że jest to ułamek wyrażający
stosunek absolutnej wartości błędu popełnionego
przy pomiarze danej wielkości do wartości tej
wielkości.
Dla ułatwienia użycia błędu względnego, do licznika
wprowadza się jedność:
C
1
d
d
11
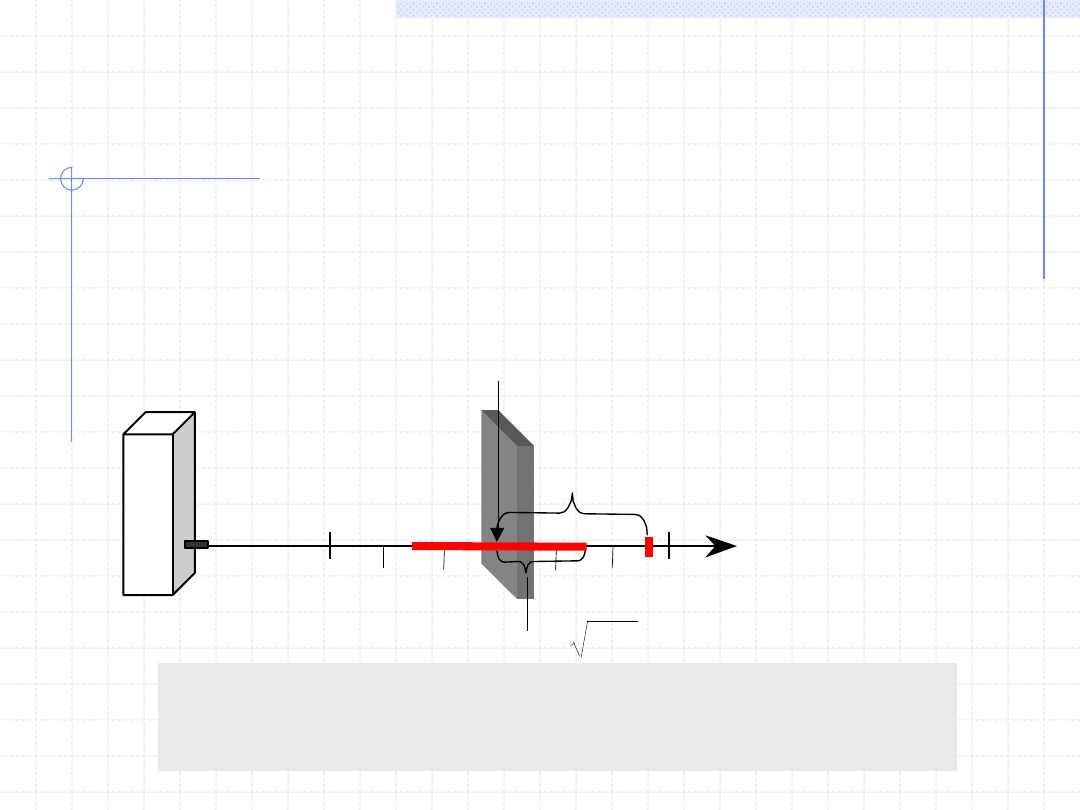
Z doświadczenia wiadomo, że wynik pomiaru pewnej wielkości,
np. odległości x za pomocą dalmierza DISTO, przyjmuje wartość z przedziału
a < x < b,
którego wielkość zależy od dokładności użytego przyrządu pomiarowego m
v = x – Ex
- błąd pomiaru
Ex - wartość oczekiwana wyniku pomiaru
x
- wynik pomiaru
- błąd średni pomiaru
2
Ev
m
a
x
2
x
3
x
4
x
1
b
DISTO
Odchylenie wyniku pomiaru x od wartości oczekiwanej v = x - Ex
nazywane błędem pomiaru, ma charakter przypadkowy, zmienia się
w czasie wykonywania pomiarów zarówno co do wielkości jak i znaku.
Błąd średni pomiaru
12
Przy założeniu średniej arytmetycznej jako wartości oczekiwanej wyniku pomiaru:
x
sr
1
n
i
x
i
n
Liczba pomiarów n = 4
x
1
= 4,006m
x
2
= 4,002m
x
3
= 4,008m
x
4
= 4,004m
x
sr
= 4,005m
Błędy poszczególnych pomiarów wynoszą:
v
1
= 0,001
v
2
= -0,003
v
3
= 0,003
v
4
= -0,001
Odchylenie standardowe, nazywane błędem średnim pomiaru
m
0
1
n
i
v
i
2
n
1
v
x
x
sr
m
0
= 0,0026
Błąd średni pomiaru
13
Pomiary, których odchyłki v przekraczają co do bezwzględnej wartości
2- lub 3-krotnie ich błąd średni:
są uznawane za odstające.
Jeżeli
m
0
0.0026
to wartość średnia i jej błąd:
m
śr
2
=
m
0
2
/
n
m
sr
m
n
m
v
m
2
m
sr
2
W podanym przykładzie brak pomiarów odstających, wszystkie pomiary
spełniają kryterium |v| ≤
W przypadku wystąpienia pomiarów odstających parametry rozrzutu x
sr
, m
0
są obliczane
iteracyjnie, odrzucając na każdym kroku pomiary odstające. W każdym kroku iteracji może się
zmieniać zestaw usuwanych pomiarów odstających, pomiar raz usunięty może wrócić do zbioru, na
podstawie którego oblicza się parametry rozrzutu. Postępowanie iteracyjne kontynuuje się do momentu,
gdy parametry rozrzutu otrzymywane w kolejnych iteracjach przestaną się różnić znacząco, co oznacza,
że zbiory w kolejnych iteracjach zawierają te same, lub prawie te same pomiary
0
0
m
v
= 0,0023
2m
v
= 0,0046
m
śr
= 0,0013
Błąd średni pomiaru
Wyszukiwarka
Podobne podstrony:
teoria bledow 2
2 Teoria Bledow Pomiarow
teoria bledow
teoria bledow ppt
Teoria błędów
Teoria błędów, !!!Uczelnia, fizyka, kolos
3 Podstawy Metrologii teoria błędów
TEORIA BŁĘDÓW
Wykład 2-Teoria błędów
dod teoria błędów
miernictwo1 teoria bledow id 77 Nieznany
7 teoria bledow
teoria bledow 2
2 Teoria Bledow Pomiarow
teoria bledow
Teoria błędów w analizie numerycznej
kompensacja błędów obrabiarek
więcej podobnych podstron