1
5. RACHUNEK WEKTOROWY
Def.5.1
Przestrzeń
3
R - zbiór wszystkich uporządkowanych trójek ( , , )
x y z liczb rzeczywistych, tj.
3
( , , ) :
, ,
x y z
x y z
R
R .
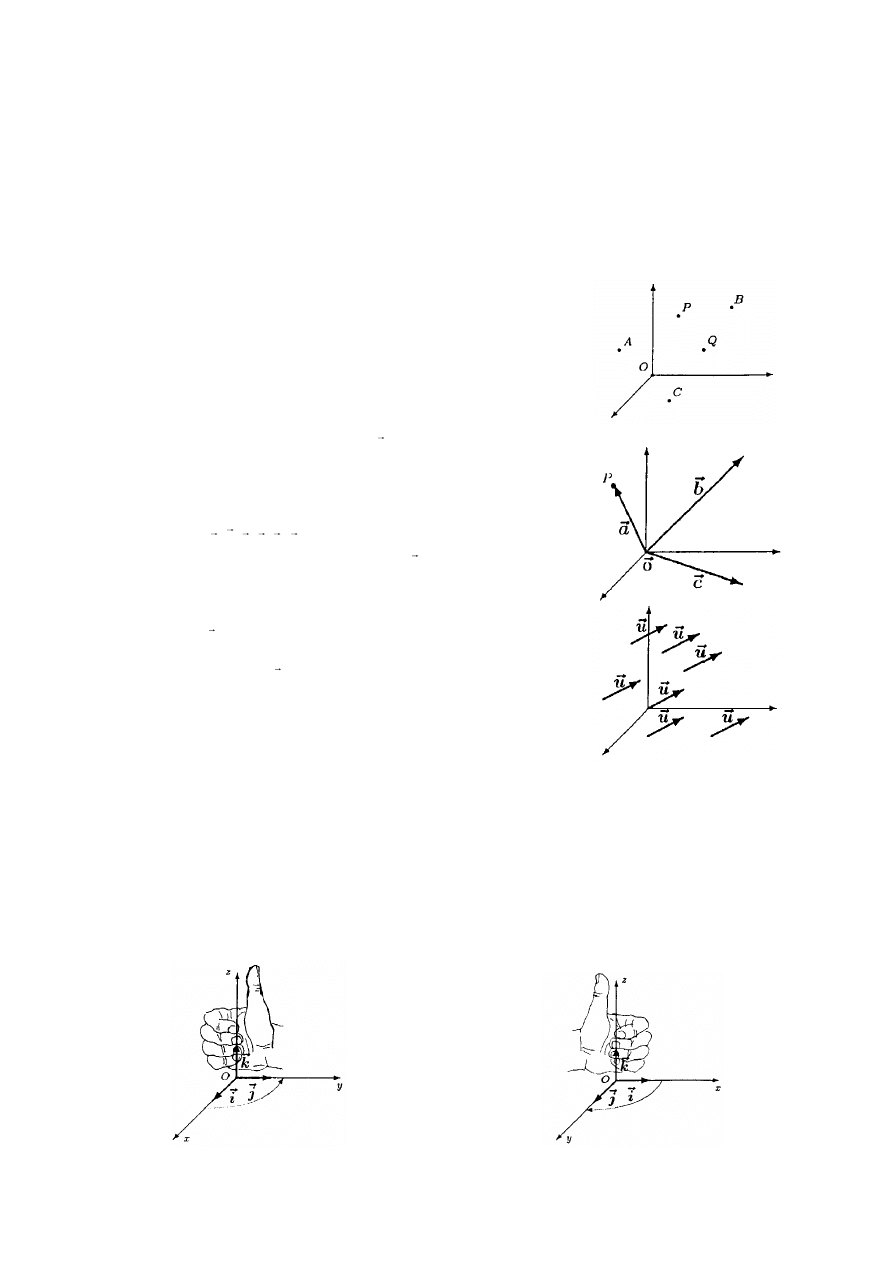
Interpretacja geometryczna przestrzeni
3
R
Przestrzeń
3
R interpretujemy jako:
1.zbiór wszystkich punktów ( , , )
P x y z w przestrzeni.
Elementy przestrzeni
3
R nazywamy punktami i oznaczamy
dużymi literami alfabetu tj. A, B, C, P, Q itd.
Liczby x, y, z nazywamy wtedy współrzędnymi punktu ( , , )
P x y z .
2. zbiór wszystkich wektorów zaczepionych
a
OP
w przestrzeni.
Wektory te mają wspólny początek (0,0,0)
O
, a końce w punktach
( , , )
P x y z . Wektor
OP
nazywamy wektorem wodzącym punktu P.
W tej interpretacji elementy przestrzeni
3
R nazywamy wektorami
i oznaczamy przez
, , , , ,
a b c u v w
itd.
Liczby x, y, z nazywamy współrzędnymi wektora
a
.
3.zbiór wszystkich wektorów swobodnych w przestrzeni. Przez
wektor swobody
u
rozumiemy zbiór wszystkich wektorów
zaczepionych w różnych punktach, które mają ten sam kierunek,
zwrot oraz długość co wektor
u
.
W tej interpretacji elementy przestrzeni
3
R także nazywamy
wektorami.
Def.5.2
Ortokartezjańskim układem współrzędnych w przestrzeni, który oznaczamy symbolem
OXYZ
nazywamy trzy
wzajemnie prostopadłe proste x, y, z przecinające się w jednym punkcie 0(0,0,0). Proste OX, OY, OZ nazywamy
osiami, a płaszczyzny OXY, OXZ, OYZ płaszczyznami układu współrzędnych.
Def.5.3
W zależności od wzajemnego położenia osi OX, OY, OZ układu współrzędnych wyróżniamy dwie jego orientacje:
układ prawoskrętny i układ lewoskrętny.
Układ prawoskrętny
Układ lewoskrętny
2
Def.5.4
1
1
1
1
( ,
,
)
P x y z ,
2
2
2
2
( ,
,
)
P x
y
z
- dwa dowolne punkty przestrzeni
3
R
Długość odcinka
1 2
P P , określa wzór:
2
2
2
1 2
2
1
2
1
2
1
(
)
(
)
(
)
P P
x
x
y
y
z
z
.
Def.5.5
Wektorem o początku w punkcie
1
1
1
1
( ,
,
)
P x y z i końcu w punkcie
2
2
2
2
( ,
,
)
P x
y
z
nazywamy uporządkowaną parę
punktów P
1
i P
2
wyznaczającą w danej przestrzeni odcinek skierowany. Wektor taki oznaczamy
1 2
P P
.
Def.5.6
Współrzędnymi (lub składowymi) wektora
1 2
a
P P
o początku w punkcie
1
1
1
1
( ,
,
)
P x y z i końcu w punkcie
2
2
2
2
( ,
,
)
P x
y
z
nazywamy liczby:
2
1
2
1
2
1
,
,
,
x
y
z
a
x
x
a
y
y
a
z
z
co zapisujemy
1 2
2
1
2
1
2
1
,
,
PP
x
x
y
y
z
z
lub
1 2
,
,
x
y
z
P P
a
a
a
.
Def.5.7
Wektor zerowy - wektor, którego koniec pokrywa się z jego początkiem. Wektor zerowy oznaczamy symbolem
0 . Współrzędne wektora zerowego przedstawiają się następująco:
0
,
0
,
0
0
.
Def.5.8
Długością wektora
1 2
P P
nazywamy odległość punktów P
1
i P
2
:
2
2
2
1 2
2
1
2
1
2
1
(
)
(
)
(
)
P P
x
x
y
y
z
z
lub
2
2
2
1 2
x
y
z
P P
a
a
a
Def.5.9
Wektorem jednostkowym nazywamy wektor, którego długość jest równa jednostce długości.
Def.5.10
Wektory
1, 0, 0 ,
0, 1, 0 ,
0, 0, 1
i
j
k
nazywamy wersorami osi układu współrzędnych, odpowiednio
osi OX, OY, OZ.
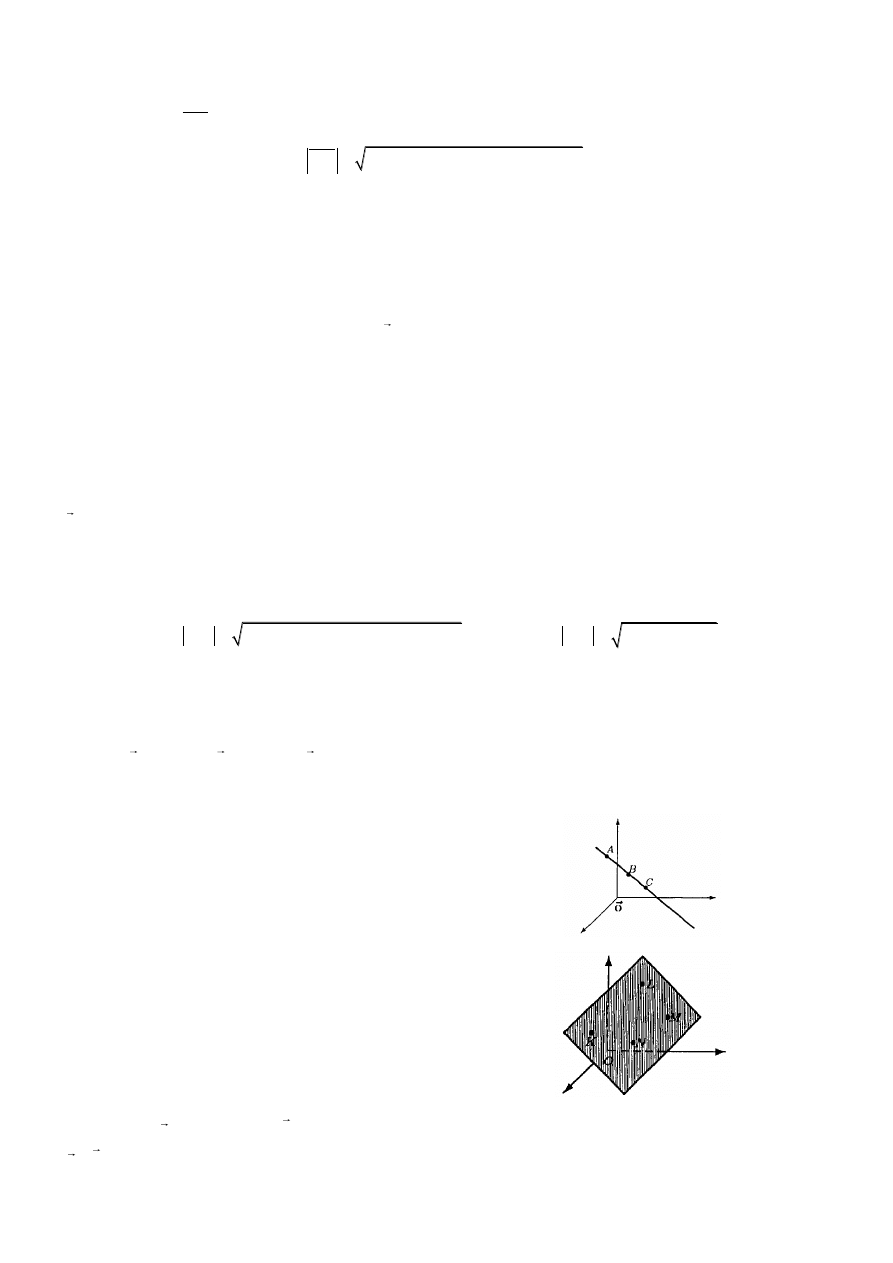
Def.5.11
Punkty A, B, C przestrzeni
3
R są współliniowe, gdy
istnieje prosta, do której należą te punkty
Def.5.12
Punkty
K,
L,
M,
N
przestrzeni
3
R
są
współpłaszczyznowe, gdy istnieje płaszczyzna, do
której należą te punkty.
Def.5.13
Dwa wektory
,
,
x
y
z
a
a
a
a
,
,
,
x
y
z
b
b
b b
nazywamy równymi, jeśli
x
x
y
y
z
z
a
b
a
b
a
b
a
b
3
Def.5.14
Działania na wektorach:
,
,
x
y
z
a
a
a
a
,
,
,
x
y
z
b
b
b b
,
,
,
x
y
z
c
c
c
c
- wektory,
R
1.
Suma wektorów
,
,
x
x
y
y
z
z
c
a
b
c
a
b
a
b
a
b
2.
Iloczyn wektora a przez liczbę rzeczywistą (skalar)
,
,
x
y
z
c
a
c
a
a
a
3.
Różnica wektorów:
,
,
x
x
y
y
z
z
c
a b
c
a
b
a
b
a
b
Własności działań na wektorach:
,
,
a b c - wektory w
3
R , ,
R .
1. a
b
b
a
{przemienność dodawania wektorów}
2.
(
)
(
)
a
b
c
a
b
c
{łączność dodawania wektorów}
3.
a
a
0
(element neutralny dodawania}
4.
a
a
0
{element przeciwny}
5. (
)
(
)
a
a
6. (
) a
a
a
7.
(
)
a
b
a
b
Własności długości wektora:
,
a b - wektoramy w
3
R ,
R .
1.
0
a
, przy czym
0
a
a
0
2.
a
a
3.
a
b
a
b
{nierówność trójkąta}
4.
a
b
a
b
.
Def.5.15
Kombinacją liniową wektorów
i
a , gdzie
1, 2,...,
i
n
nazywamy wektor:
1
1
2
2
1
...
n
i
i
n
n
i
a
a
a
a
,
gdzie
i
R ,
1, 2,...,
i
n
.
Def.5.16
Wektory
i
a ,
1, 2,...,
i
n
nazywamy liniowo zależnymi, jeżeli istnieje n stałych
i
nierównych jednocześnie
zeru (tj.
2
1
0
n
i
i
) takich, że:
1
n
i
i
i
a
0
Dla liniowo niezależnych wektorów
i
a ,
1, 2,...,
i
n
zachodzi implikacja:
1
0,
1, 2, ... ,
n
i
i
i
i
a
i
n
0
4
Def.5.17
Wektory, które nie są liniowo zależne nazywamy liniowo niezależnymi.
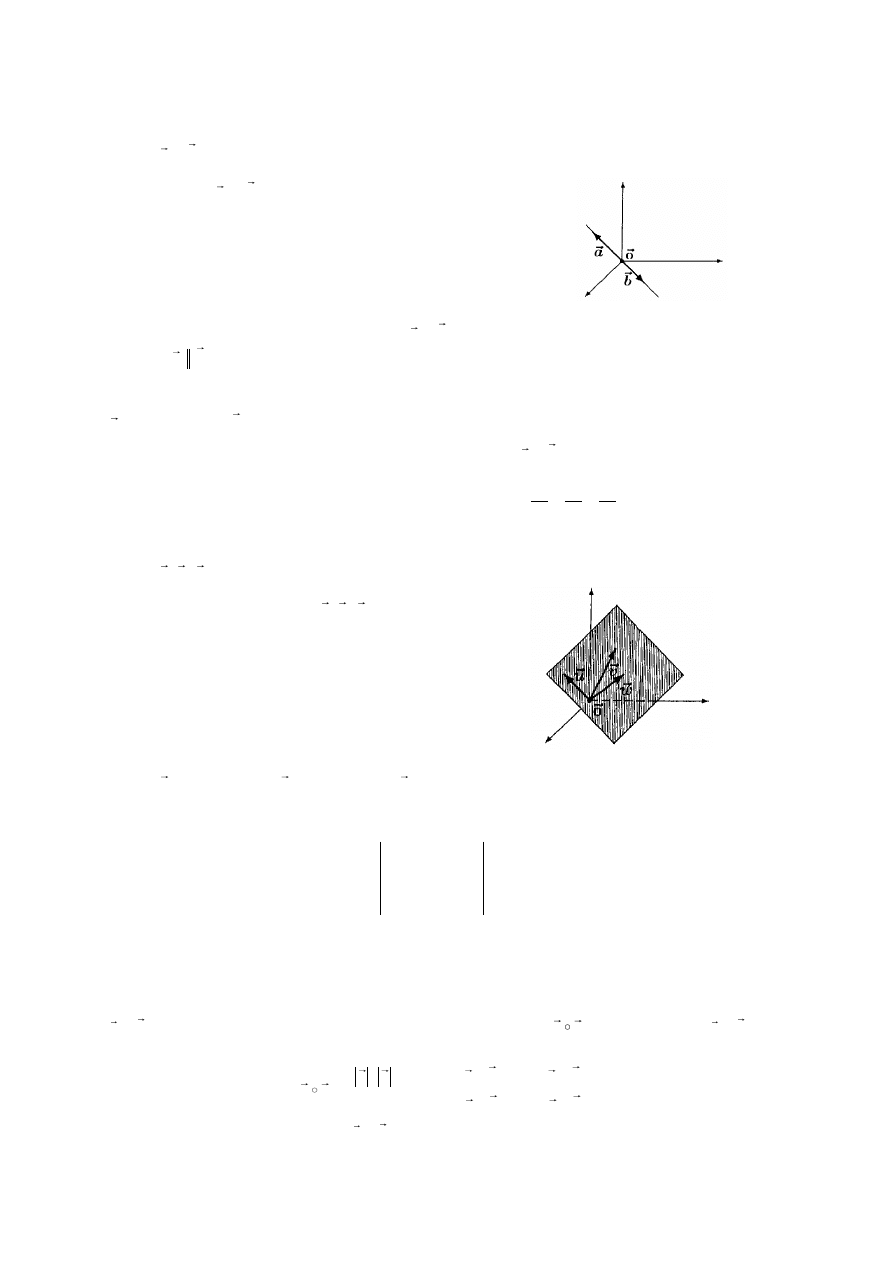
Def.5.18
Dwa wektory a i b liniowo zależne nazywamy wektorami współliniowymi (lub kolinearnymi).
Mówimy, że wektory a i b są współliniowe, gdy istnieje
prosta, w której zawarte są te wektory
Def.5.19
Dwa niezerowe wektory współliniowe (kolinearne) a i b nazywamy wektorami równoległymi.
Piszemy wtedy a
b .
Def.5.20
Niech
,
,
x
y
z
a
a
a
a
,
,
,
x
y
z
b
b
b b
będą niezerowymi wektorami.
Warunkiem koniecznym i wystarczającym równoległości wektorów a i b jest zależność:
1
x
y
z
x
y
z
a
a
a
rz
b
b
b
lub
y
x
z
x
y
z
a
a
a
b
b
b
Def.5.21
Trzy wektory , ,
u v w liniowo zależne nazywamy wektorami współpłaszczyznowymi (lub komplanarnymi).
Mówimy,
że
wektory
, ,
u v w
są
współpłaszczyznowe, gdy istnieje płaszczyzna, w
której zawarte są te wektory
Tw.5.1
Trzy wektory
,
,
,
,
,
,
,
,
x
y
z
x
y
z
x
y
z
u
u u
u
v
v v
v
w
w w
w
są komplanarne (współpłaszczyznowe)
wtedy i tylko wtedy, gdy spełniony jest warunek:
0
x
y
z
x
y
z
x
y
z
u
u
u
v
v
v
w
w
w
.
ILOCZYN SKALARNY
Def.5.22
Niech
u
i v będą dowolnymi wektorami w
3
R . Iloczynem skalarnym u v dwóch wektorów
u
i v nazywamy
liczbę określoną wzorem:
cos
0
u
v
u
v
u v
u
v
0
0
0
0
,
gdzie
jest miarą kąta między wektorami
u
i v .
5
Kosinus kąta między niezerowymi wektorami
u
i
v wyraża się wzorem: cos
u v
u
v
.
Def.5.23
Wektory
u
i
v nazywamy wektorami ortogonalnymi, jeśli
0
u v
Tw.5.2
Niezerowe wektory
u
i
v są prostopadłe, co zapisujemy u
v
, wtedy i tylko wtedy, gdy są ortogonalne.
0
u
v
u v
.
Wzór na obliczanie iloczynu skalarnego
Iloczyn skalarny wektorów
,
,
,
,
,
x
y
z
x
y
z
u
u u
u
v
v v
v
jest równy sumie iloczynów odpowiednich
współrzędnych tych wektorów, tzn.:
x x
y
y
z z
u v
u v
u v
u v
Własności iloczynu skalarnego:
, ,
u v w - dowolne wektory w
3
R ,
R
1. u v
v u
2.
u
v
w
u w v w
3.
u
v
u v
4.
2
u u
u
5. u v
u
v
.
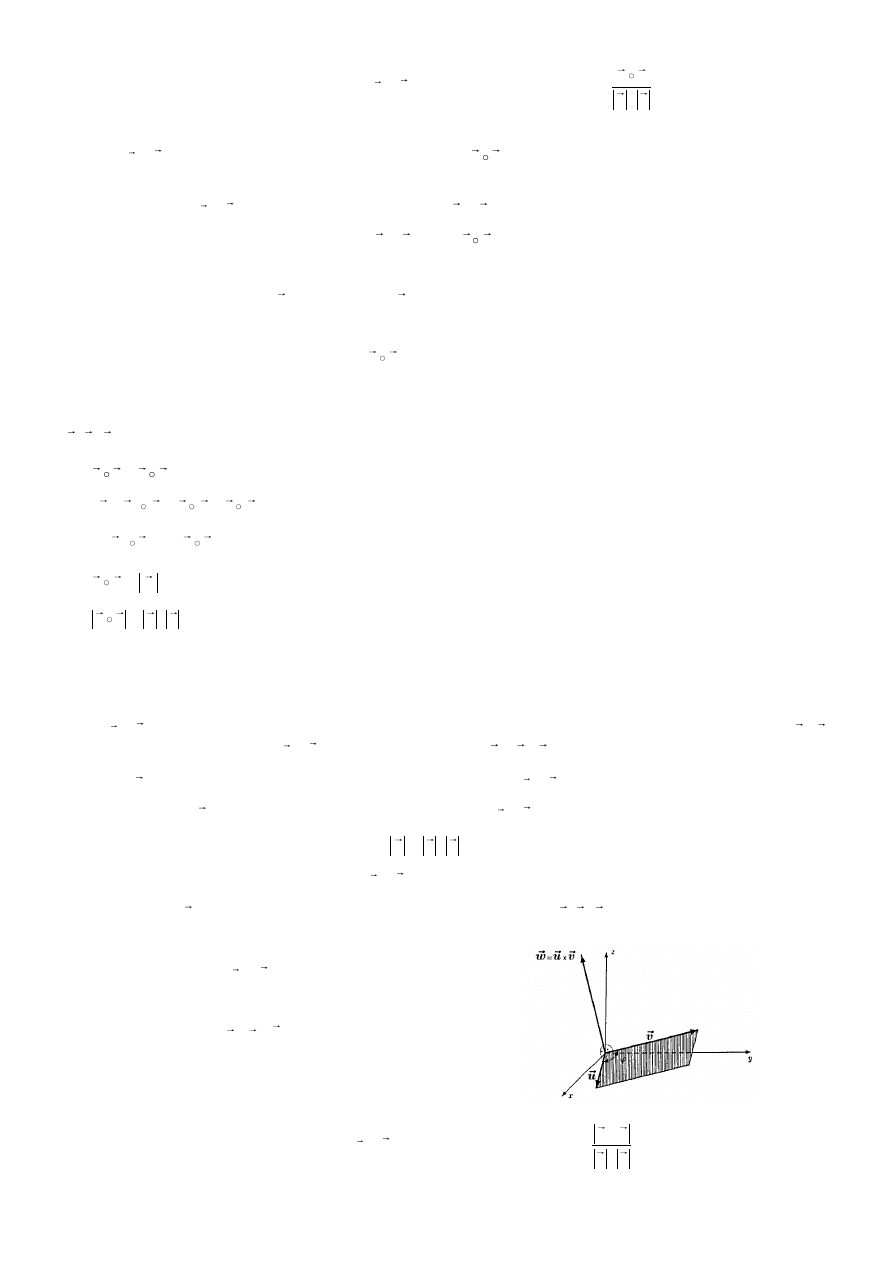
ILOCZYN WEKTOROWY
Def.5.24
Niech
u
i v będą dowolnymi niewspółliniowymi i niezerowymi wektorami w
3
R . Iloczynem wektorowym u v
uporządkowanej pary wektorów
u
i v nazywamy taki wektor w u v
, który spełnia warunki:
1. wektor w jest prostopadły do płaszczyzny rozpiętej na wektorach
u
i v ,
2. długość wektora w jest równa iloczynowi długości wektorów
u
i v i sinusa kąta między nimi, tj.
sin
w
u
v
,
gdzie
jest miarą kąta między wektorami
u
i v ,
3. zwrot wektora w jest tak dobrany, by uporządkowana trójka wektorów , ,
u v w miała orientację zgodną z
przyjętą orientacją przestrzeni.
Jeżeli jeden z wektorów
u
i v jest wektorem zerowym
lub wektory te są współliniowe, to przyjmujemy, że:
u v
0
Sinus kąta między niezerowymi wektorami
u
i v wyraża się wzorem: sin
u v
u
v
.
6
Własności iloczynu wektorowego:
, ,
u v w - dowolne wektory w
3
R ,
R
1.
u v
v u
2.
u
v
w
u w v
w
3.
(
)
u
v
w
u v
u w
4.
u
v
u v
5. u v
u
v
- (równość jest możliwa tylko wtedy, gdy wektory
u
i
v są prostopadłe)
6. u v
u v
0
Wzór na obliczanie iloczynu wektorowego
,
,
,
,
,
x
y
z
x
y
z
u
u u
u
v
v v
v
- dowolne wektory w
3
R
Iloczyn wektorowy tych wektorów wyraża się wzorem:
,
,
y
z
x
y
x
z
y
z
x
y
x
z
u
u
u
u
u
u
u v
v
v
v
v
v
v
lub
x
y
z
x
y
z
i
j
k
u v
u
u
u
v
v
v
,
gdzie
, ,
i j k
oznaczają wersory odpowiednio na osiach OX, OY, OZ.
Interpretacja geometryczna:
1.
Pole równoległoboku rozpiętego na wektorach
i
AB
AC
jest równe
S
AB AC
2.
Pole trójkąta rozpiętego na wektorach
i
AB
AC
jest równe połowie pola równoległoboku rozpiętego na tych
wektorach, czyli:
1
2
ABC
S
AB AC
3.
Pole równoległoboku o przekątnych ,
p q wyraża się wzorem:
1
2
S
p q
.
ILOCZYN MIESZANY
Def.5.25
Niech
,
,
,
,
,
,
,
,
x
y
z
x
y
z
x
y
z
u
u u
u
v
v v
v
w
w w
w
będą dowolnymi wektorami w
3
R .
Iloczynem mieszanym , ,
u v w uporządowanej trójki wektorów , ,
u v w nazywamy liczbę określoną wzorem:
, ,
u v w
u v
w
.
Wzór na obliczanie iloczynu mieszanego: ( , ,
)
x
y
z
x
y
z
x
y
z
u
u
u
u v
w
v
v
v
w
w
w
.
7
Własności iloczynu mieszanego:
, ,
,
u v w r - wektory w
3
R ,
R
1.
( , ,
)
( , , )
( ,
, )
u v w
w u v
v w u
2.
( , ,
)
( , ,
)
( ,
, )
u v w
v u w
u w v
3.
(
, ,
)
( , ,
)
( , ,
)
u
r v w
u v w
r v w
4.
(
, , )
( , ,
)
u v w
u v w
5.
( , ,
)
u v w
u
v
w
(równość jest możliwa tylko wtedy, gdy przynajmniej jeden z wektorów , ,
u v w jest
zerowy albo, gdy te wektory są wzajemnie prostopadłe)
6.
( , ,
)
0
, ,
u v w
u v w
są komplanarne (współpłaszczyznowe).
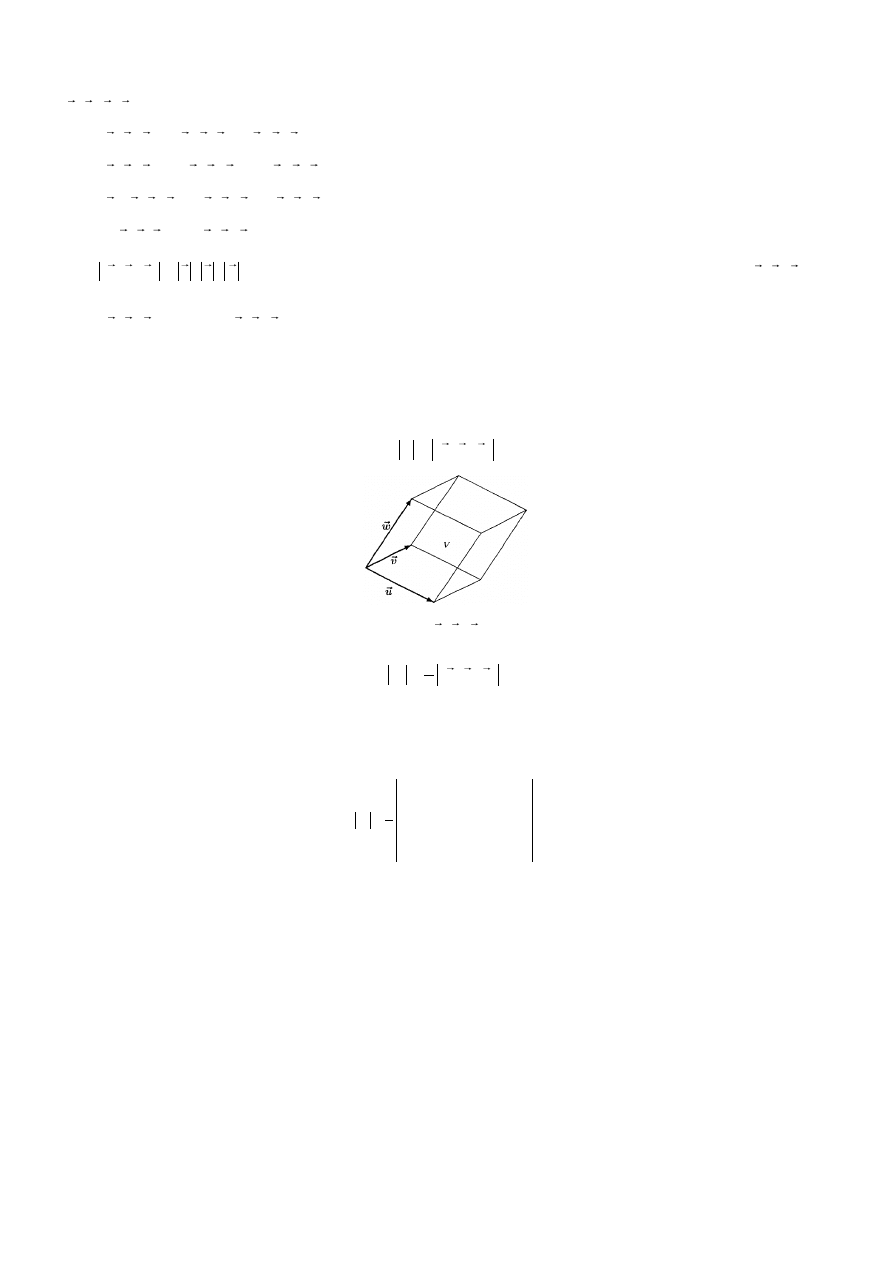
Interpretacja geometryczna iloczynu mieszanego wektorów:
1. Objętości równoległościanu V rozpiętego na trzech wektorach jest równa
, ,
V
u v w
2. Objętość czworościanu
c
V rozpiętego na wektorach , ,
u v w jest równa
1
, ,
6
c
V
u v w
.
W szczególności, jeśli dane są wierzchołki tego czworościanu:
1
1
1
1
( ,
,
)
P x y z ,
2
2
2
2
( ,
,
)
P x
y
z
,
3
3
3
3
( ,
,
)
P x
y
z ,
4
4
4
4
( ,
,
)
P x
y
z
to jego objętość wyraża się wzorem:
1
1
1
2
2
2
3
3
3
4
4
4
1
1
1
det
1
6
1
c
x
y
z
x
y
z
V
x
y
z
x
y
z
.
Wyszukiwarka
Podobne podstrony:
algebra wektorow 5 wyklad
C 03 Algebra wektorow
120 Algebra wektorów
Algebra wektory
algebra wektorów i tensorów
Algebra wektorów
Bud algebra i wektory lista4
algebra wektorow 5 wyklad
,algebra 1,wektor i działanie na wektorach
sciaga wektory, szkola, algebra liniowa
więcej podobnych podstron