
Sławomir Kulesza
Cyfrowe przetwarzanie sygnałów (5)
Wykład dla studentów I roku (N)SMU WMiI
Specjalność: Techniki multimedialne
1 (42)
Własności splotu sygnałów
W przypadku układów LTI, odpowiedź na pobudzenie będące kombinacją
przesuniętych impulsów jednostkowych:
x [n]=
∑
k =−∞
∞
x [k ]⋅[n−k ]
wyraża się w postaci splotu:
2 (42)
y [n]=T
∑
k =−∞
∞
x [k ]⋅[n−k ]=
∑
k =−∞
∞
x [ k ]⋅h[n−k ]=x [n]∗h[n]
Obliczanie splotu metodą słupkową
Obliczenia splotu sygnałów można wykonać metodą słupkową podobną do
wykorzystywanej przy klasycznym mnożeniu dwóch liczb:
g[n]
g[0].
g[1]
g[2]
h[n]
h[-1]
h[0].
h[1]
g[0]h[1] g[1]h[1] g[2]h[1]
g[0]h[0] g[1]h[0] g[2]h[0]
g[0]h[-1] g[1]h[-1] g[2]h[-1]
y[n]
y[-1]
y[0].
y[1]
y[2]
y[3]
3 (42)
Przemienność splotu
Operacja splotu jest przemienna (komutatywna) w znaczeniu takim, że jej wynik
nie zależy od tego, który z ciągów wejściowych jest zawijany i przesuwany:
y [n]=
∑
k =−∞
∞
x [ k ]⋅h[n−k ]=x [n]∗h[n]
Dokonajmy zamiany indeksów: m = n – k:
y [n]=
∑
m=−∞
∞
x [n−m]⋅h[m]
Ale indeks m jest niemy, wiec możemy go zastąpić ponownie indeksem k:
y [n]=
∑
k =−∞
∞
x [ n−k ]⋅h[ k ]=h[n]∗x [n]
Otrzymaliśmy wyrażenie, w którym odpowiedź impulsowa jest niezmieniona,
natomiast zawijane i przesuwane jest pobudzenie układu, co dowodzi
przemienności splotu.
4 (42)
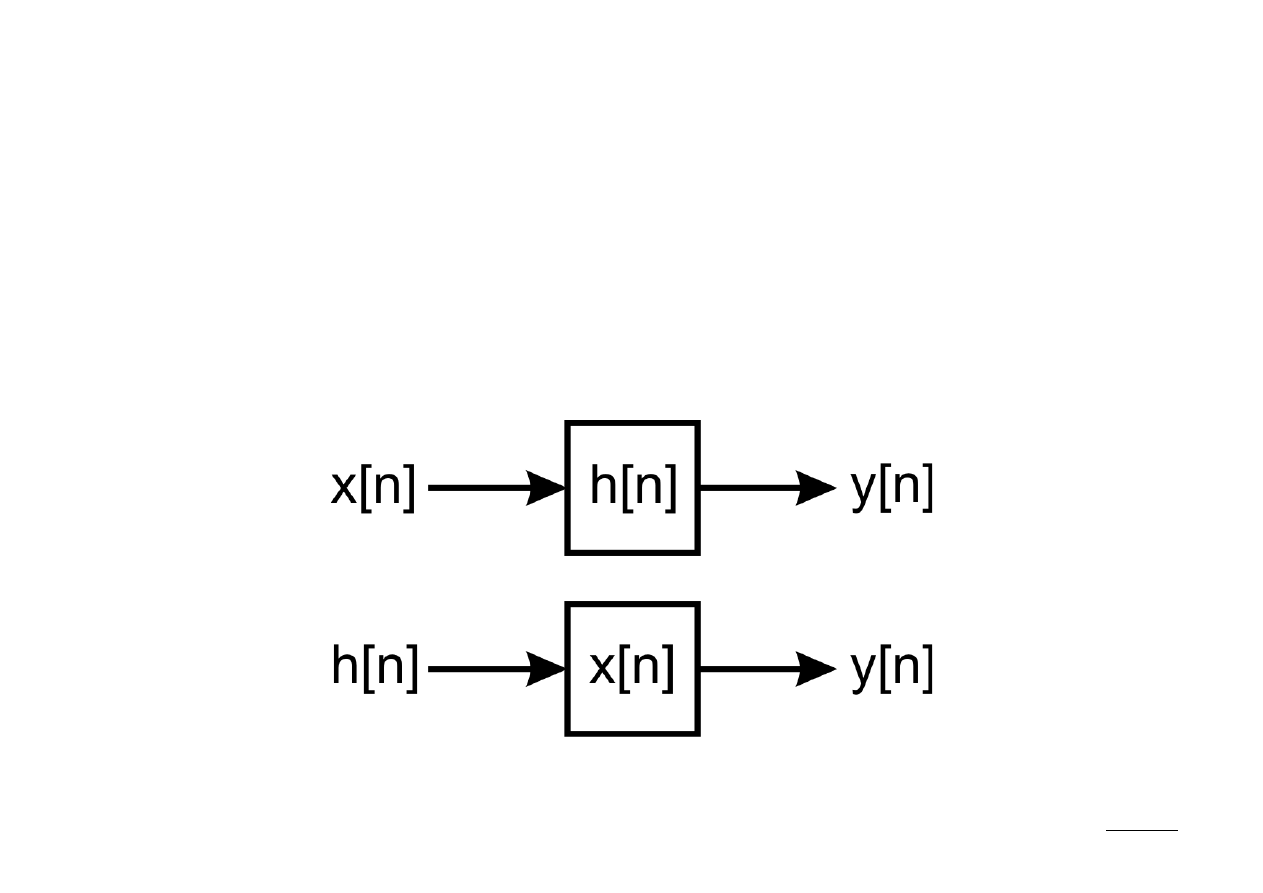
Konsekwencje przemienności splotu
Dowiedliśmy, że splot jest przemienny, tzn.:
x [n]∗h[n]=h[n]∗x [n]
Z punktu widzenia układów LTI, przemienność splotu oznacza, że możliwa jest
zamiana ról pobudzenia x[n] oraz odpowiedzi impulsowej h[n]:
5 (42)
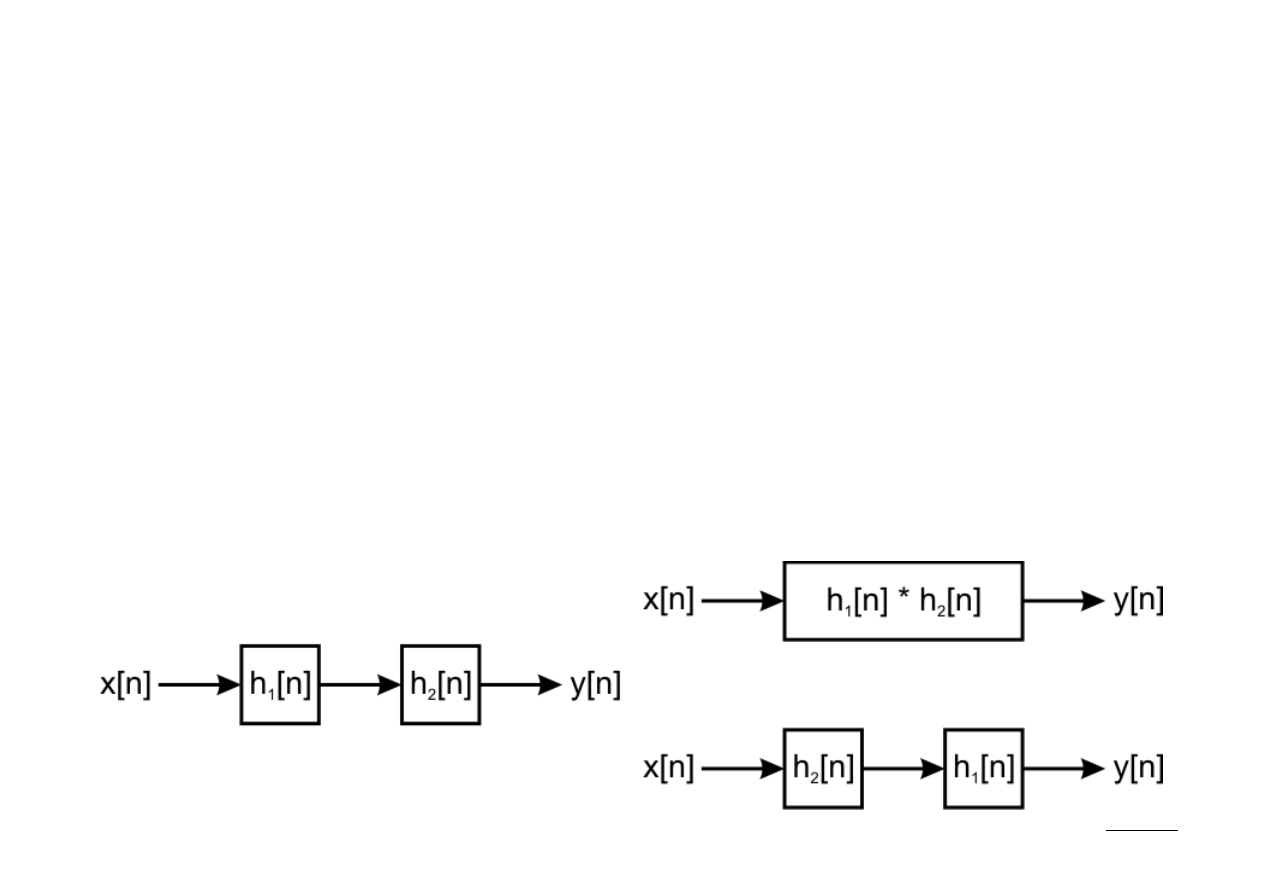
Łączność splotu
Splot jest operacją łączną, co oznacza, że:
x [n]∗h
1
[
n]
∗
h
2
[
n]=x [ n]∗
h
1
[
n]∗h
2
[
n]
Z fizycznego punktu widzenia oznacza to, że odpowiedź układu h
1
[n] jest
pobudzeniem układu h
2
[n] dołączonego do niego w szereg lub – równoważnie –
pobudzenie x[n] jest doprowadzane do układu o odpowiedzi impulsowej
h[n] = h
1
[n] * h
2
[n]. Co więcej, z uwagi na przemienność splotu możliwa jest
zamiana kolejności układów w kaskadzie:
6 (42)
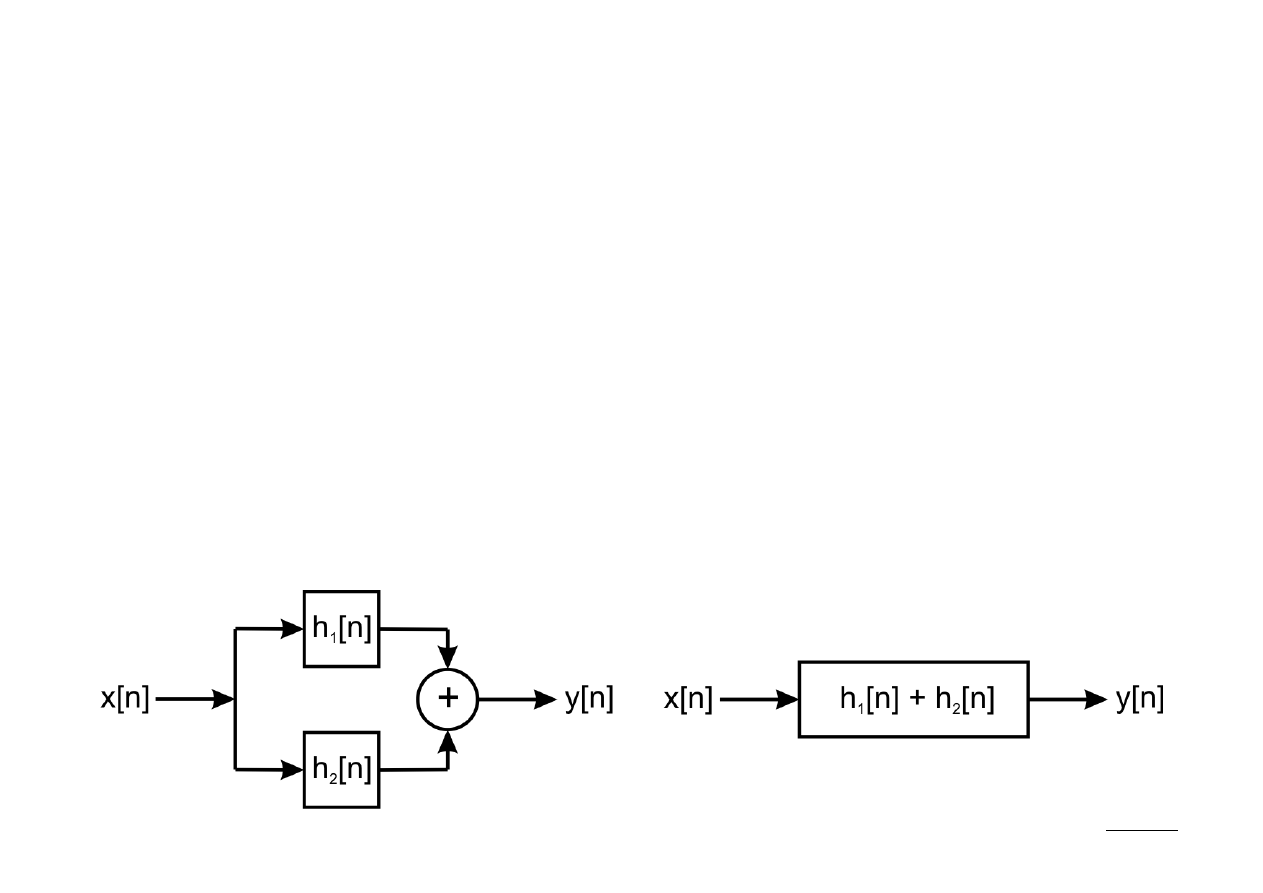
Rozdzielność splotu
Splot sygnałów jest operacją rozdzielną względem dodawania:
x [n]∗
h
1
[
n]h
2
[
n]
=
x [n]∗h
1
[
n]x [ n]∗h
2
[
n]
Oznacza to, że jeśli mamy dwa układy LTI o odpowiedziach impulsowych h
1
[n]
oraz h
2
[n] pobudzane tym samym sygnałem x[n], to suma ich odpowiedzi jest
równa odpowiedzi jednego układu o odpowiedzi impulsowej h[n] = h
1
[n] + h
2
[n].
Widać zatem, że wypadkowy układ powstaje przez równoległe połączenie dwóch
układów składowych.
7 (42)

Przyczynowe układy LTI
Układ jest przyczynowy, gdy jego odpowiedź y[n] zależy wyłącznie od bieżącej
i poprzednich próbek pobudzenia: y[n
0
] = f (x[n], n ≤ n
0
).
Niech dany jest układ, którego odpowiedź w chwili n = n
0
opisuje splot:
y [n
0
]=
∑
k =−∞
∞
x [k ]⋅h[n
0
−
k ]
Rozdzielmy splot na dwie części, z których jedna zawiera przeszłe i bieżące
próbki pobudzenia, natomiast druga – wyłącznie próbki przyszłe:
y [n
0
]=
∑
k=0
∞
x [ k ]⋅h[n
0
−
k ]
∑
k=−∞
−
1
x [k ]⋅h[ n
0
−
k ]=...
h0⋅x n
0
h1⋅x n
0
−
1...
h−1⋅x n
0
1h−2⋅x n
0
2...
8 (42)

Z uwagi na przyczynowość układu, wartość odpowiedzi dla n = n
0
musi zależeć
wyłącznie od bieżącej i przeszłych wartości próbek, skąd wynika, że wyrażenie
w drugim nawiasie musi być równe zero. Jest tak wtedy i tylko wtedy, gdy:
∀
nn
0
hn=0
Ponieważ jednak h[n] jest odpowiedzią układu LTI na pobudzenie impulsem
jednostkowym dla n = 0, powyższy warunek jest koniecznym i wystarczającym dla
określenia przyczynowości układu.
Układ LTI jest przyczynowy wtedy i tylko wtedy, gdy jego odpowiedź
Układ LTI jest przyczynowy wtedy i tylko wtedy, gdy jego odpowiedź
impulsowa h[n] jest równa zero dla ujemnych wartości n.
impulsowa h[n] jest równa zero dla ujemnych wartości n.
9 (42)

Odpowiedź układu przyczynowego
Ponieważ dla układów przyczynowych h[n<0] = 0, granice sumowania splotu
ulegają jednostronnemu zawężeniu:
y [n]=
∑
k =0
∞
h[k ]⋅x [n−k ]=
∑
k =−∞
n
x [ k ]⋅h[n−k ]
Jeśli dodatkowo pobudzenie przyczynowego układu LTI będzie także ciągiem
przyczynowym (x[n<0] = 0), to granice obliczania splotu zostaną zawężone
obustronnie:
y [n]=
∑
k =0
n
h[k ]⋅x [n−k ]=
∑
k =0
n
x [k ]⋅h[n−k ]
Odpowiedź układu przyczynowego na przyczynowe pobudzenie jest również
ciągiem przyczynowym.
10 (42)

Stabilność układów LTI
Wprowadzona wcześniej definicja stabilności w sensie BIBO stwierdza, iż układ
jest stabilny, jeśli ograniczone (w sensie amplitudy) pobudzenie zawsze generuje
ograniczoną odpowiedź:
∀
n
∃
M
x
, M
y
∣
x [n]∣≤ M
x
∞
⇒
∣
y [n]∣≤ M
y
∞
Sprawdźmy, jakie konsekwencje dla charakterystyki układu LTI będzie miała
definicja stabilności. Obliczmy wartość bezwzględną splotu:
∣
y [n]∣=
∣
∑
k =−∞
∞
h[ k ]⋅x [n−k ]
∣
≤
∑
k =−∞
∞
∣
h[ k ]∣⋅∣x [n−k ]∣
Skoro pobudzenie jest ograniczone, to:
∣
y [n]∣≤ M
x
⋅
∑
k =−∞
∞
∣
h[ k ]∣
11 (42)

Kryterium stabilności układów LTI
Odpowiedź układu LTI na ograniczone pobudzenie jest ciągiem:
∣
y [n]∣≤ M
x
⋅
∑
k =−∞
∞
∣
h[ k ]∣
Aby układ był stabilny, odpowiedź również musi być ograniczona, co jest
prawdziwe wtedy i tylko wtedy, gdy:
∑
k=−∞
∞
∣
h[k ]∣∞
Układ LTI jest stabilny wtedy i tylko wtedy, gdy jego odpowiedź impulsowa
Układ LTI jest stabilny wtedy i tylko wtedy, gdy jego odpowiedź impulsowa
jest ciągiem bezwzględnie sumowalnym.
jest ciągiem bezwzględnie sumowalnym.
12 (42)

Skończony czas odpowiedzi stabilnych układów LTI
Warunek, aby odpowiedź impulsowa h[n] była bezwzględnie sumowalna oznacza,
że jej wartości muszą w nieskończoności zbiegać do zera:
lim
n ∞
h[ n]=0
Konsekwencją tego faktu jest zbieżność do zera także odpowiedzi y[n] układu
wtedy, gdy pobudzenie jest skończone (x[n>n
0
] = 0). Aby to sprawdzić załóżmy,
że:
∣
x [nn
0
]∣
M
x
x [n≥n
0
]=
0
13 (42)

Wówczas odpowiedź układu dla n = n
0
+ N:
y [n
0
N ]=
∑
k=−∞
N −1
h[k ]⋅x [n
0
N −k ]
∑
k= N
∞
h[k ]⋅x [n
0
N −k ]=...
...
∑
k= N
∞
h[k ]⋅x [n
0
N −k ]
Wartość bezwzględna odpowiedzi wynosi:
∣
y [n
0
N ]
∣
=
∣
∑
k= N
∞
h[ k ]⋅x [n
0
N −k ]
∣
≤
∑
k =N
∞
∣
h[ k ]∣⋅∣x [n
0
N −k ]∣≤...
...≤M
x
⋅
∑
k =N
∞
∣
h[ k ]∣
14 (42)
Skoro jednak odpowiedź impulsowa jest zbieżna do zera:
lim
N ∞
∑
k =N
∞
∣
h[k ]∣=0
Oznacza to, że i odpowiedź układu jest zbieżna do zera:
lim
N ∞
∣
y [n
0
N ]∣≤ lim
N ∞
M
x
⋅
∑
k= N
∞
∣
h[ k ]∣=0
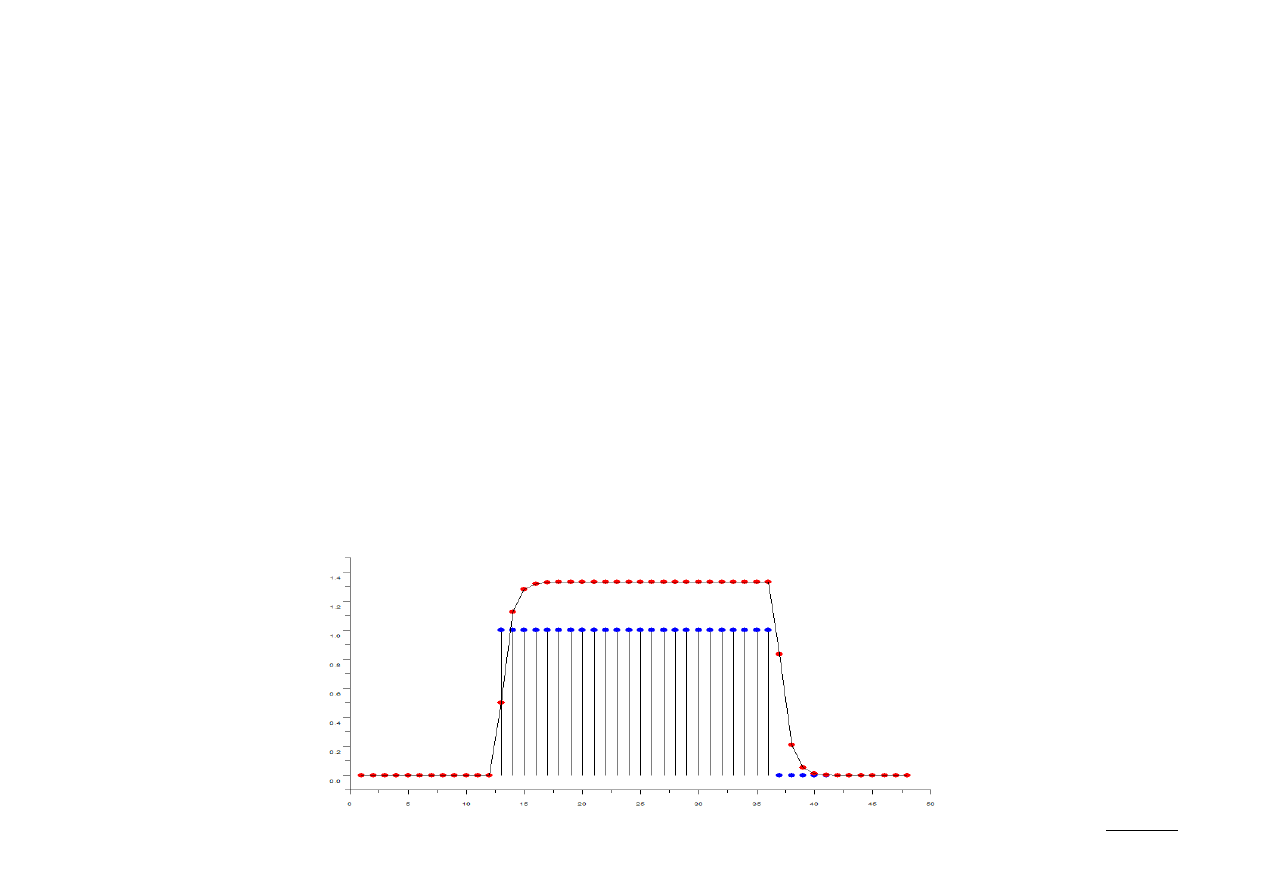
Powyższy wynik oznacza, że dowolne skończone (w sensie czasu trwania)
Powyższy wynik oznacza, że dowolne skończone (w sensie czasu trwania)
pobudzenie stabilnego układu LTI generuje odpowiedź z natury
pobudzenie stabilnego układu LTI generuje odpowiedź z natury
niestacjonarną, tzn. taką, której amplituda z czasem zbiega do zera.
niestacjonarną, tzn. taką, której amplituda z czasem zbiega do zera.
15 (42)
Ex.: Wyznaczyć obszar stabilności z uwagi na wartość parametru a układu LTI
o odpowiedzi impulsowej:
h[n]=a
n
⋅
u[n]
Zauważmy najpierw, iż układ jest przyczynowy, stąd też warunek bezwzględnej
sumowalności odpowiedzi impulsowej wyraża się następująco:
∑
k=0
∞
∣
a
k
∣=
∑
k =0
∞
∣
a∣
k
=
1∣a∣∣a∣
2
...
Powyższy szereg geometryczny jest zbieżny dla |a| < 1:
∑
k=0
∞
∣
a∣
k
=
1
1−∣a∣
W przypadku, gdy |a| ≥ 1, szereg jest rozbieżny. Stąd też, układ jest stabilny
wtedy, gdy |a| < 1, oraz jest niestabilny, gdy |a| ≥ 1.
16 (42)
Ex.: Wyznaczyć obszar stabilności z uwagi na wartość parametrów a oraz b
układu LTI o odpowiedzi impulsowej:
h[n]=a
n
⋅
u[n]b
n
⋅
u[−n−1]
Powyższy układ jest nieprzyczynowy, stąd warunek stabilności przyjmuje postać:
∑
k=−∞
∞
∣
h[k ]∣=
∑
k=−∞
−
1
∣
b
k
∣
∑
k=0
∞
∣
a
k
∣=
∑
k =−∞
−
1
∣
b∣
k
∑
k =0
∞
∣
a∣
k
=
...
Zajmijmy sie chwilowo zbieżnością pierwszego szeregu:
∑
k=−∞
−
1
∣
b∣
k
=
...∣b∣
−
2
∣
b∣
−
1
=
1
∣
b∣
1
∣
b∣
2
...=
1
∣
b∣
⋅
1
1
∣
b∣
...
=
...
...=
1
∣
b∣
⋅
1
1−
1
∣
b∣
Szereg pierwszy jest zbieżny, gdy |b| > 1, zaś drugi, gdy |a| < 1. Wynika stąd, że
układ jest stabilny, gdy jednocześnie |a| < 1 oraz |b| > 1.
17 (42)

Układy o skończonej i nieskończonej odpowiedzi impulsowej
Dotychczas układy LTI klasyfikowane były z uwagi na postać odpowiedzi
impulsowej h[n]. Wygodnie jest jednak wprowadzić sobie dodatkowy podział
układów LTI uwzględniający długość odpowiedzi impulsowej:
–
układy o skończonej odp. impulsowej (Finite Impulse Response – FIR),
–
układy o nieskończonej odp. impulsowej (Infinite Impulse Response – IIR).
18 (42)

Układy FIR
Układy FIR cechuje odpowiedź impulsowa o skończonym czasie trwania, tzn.
równa zero poza skończonym przedziałem czasu. Bez utraty ogólności rozważań
można analizować wyłącznie przyczynowe układy FIR, dla których:
h[n]=0 ⇔
n0∨n≥ M
W takim przypadku splot redukuje się do postaci:
y [n]=
∑
k=0
M −1
h[k ]⋅x [n−k ]
19 (42)

Pamięć układów FIR
Otrzymany wynik można zinterpretować zauważywszy, iż odpowiedź układu
w dowolnej chwili n jest kombinacją liniową M-ostatnich próbek pobudzenia:
y [n]=h[0]⋅x [n]h[1]⋅x [n−1]...h[ M −1]⋅x [n−M 1]
W efekcie układ pełni rolę okna czasowego, które do wygenerowania odpowiedzi
potrzebuje tylko M-ostatnich próbek pobudzenia i odrzuca wszystkie próbki
wcześniejsze (x [ n – M }, x [ n – M – 1 ], ...).
Z tego względu o układach FIR mówi się, że posiadają one M-próbkową pamięć.
20 (42)
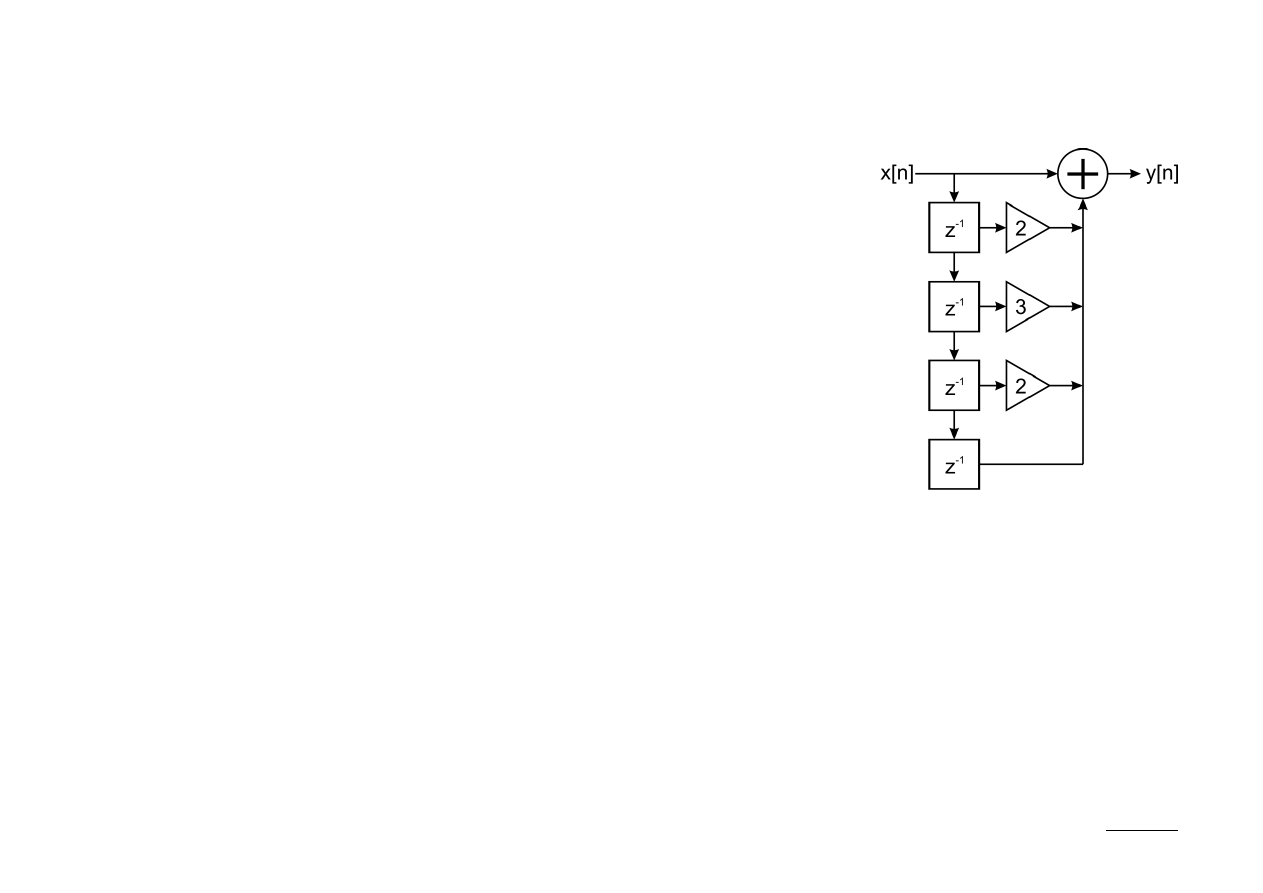
Realizacja układów FIR
Ex.: Zaprojektować układ o odpowiedzi impulsowej:
h[n]=[1,2,3,2 ,1]
Jest to przyczynowy układ FIR, którego odpowiedź wynosi:
21 (42)
y [n]=
∑
k =0
4
h[k ] x [n−k ]=
h[0]⋅x [n]h[1]⋅x [n−1]h[2]⋅x [n−2]h[3]⋅x [n−3]h[4]⋅x [n−4]=
x [ n]2⋅x [n−1]3⋅x [n−2]2⋅x [n−3]x [n−4]

Układy IIR
Układy LTI o nieskończonej odpowiedzi impulsowej cechuje z kolei co najwyżej
jednostronne ograniczenie długości ciągu h[n]. Nie tracąc ogólności rozważań,
splot przyczynowych układów IIR ma postać:
y [n]=
∑
k =0
∞
h[k ]⋅x [n−k ]
W tym przypadku odpowiedź układu jest kombinacją liniową nieskończonej ilości
próbek wejściowych (bieżącej i przeszłych), stąd też układy IIR określa się
mianem układów z nieskończoną pamięcią.
22 (42)

Opis układów czasu dyskretnego równaniami różnicowymi
Jak dotąd, wszystkie układy LTI czasu dyskretnego analizowane były pod kątem
ich odpowiedzi impulsowej h[n], która spleciona z dowolnym pobudzeniem
generowała odpowiedź układu:
y [n]=
∑
k =−∞
∞
h[ k ]⋅x [n−k ]
Splot narzucał jednocześnie jeden z możliwych sposobów syntezy danego układu
LTI, wykorzystując do tego celu sumatory, wzmacniacze oraz elementy
opóźniające.
Powyższa metoda zawodzi w przypadku układów IIR, których odpowiedź
impulsowa jest nieskończona – wymaga nieskończonej liczby elementów
przesuwających (komórek pamięci). Z tego względu synteza układów IIR musi być
prowadzona w oparciu o inną metodę niż splot – równania różnicowe.
23 (42)

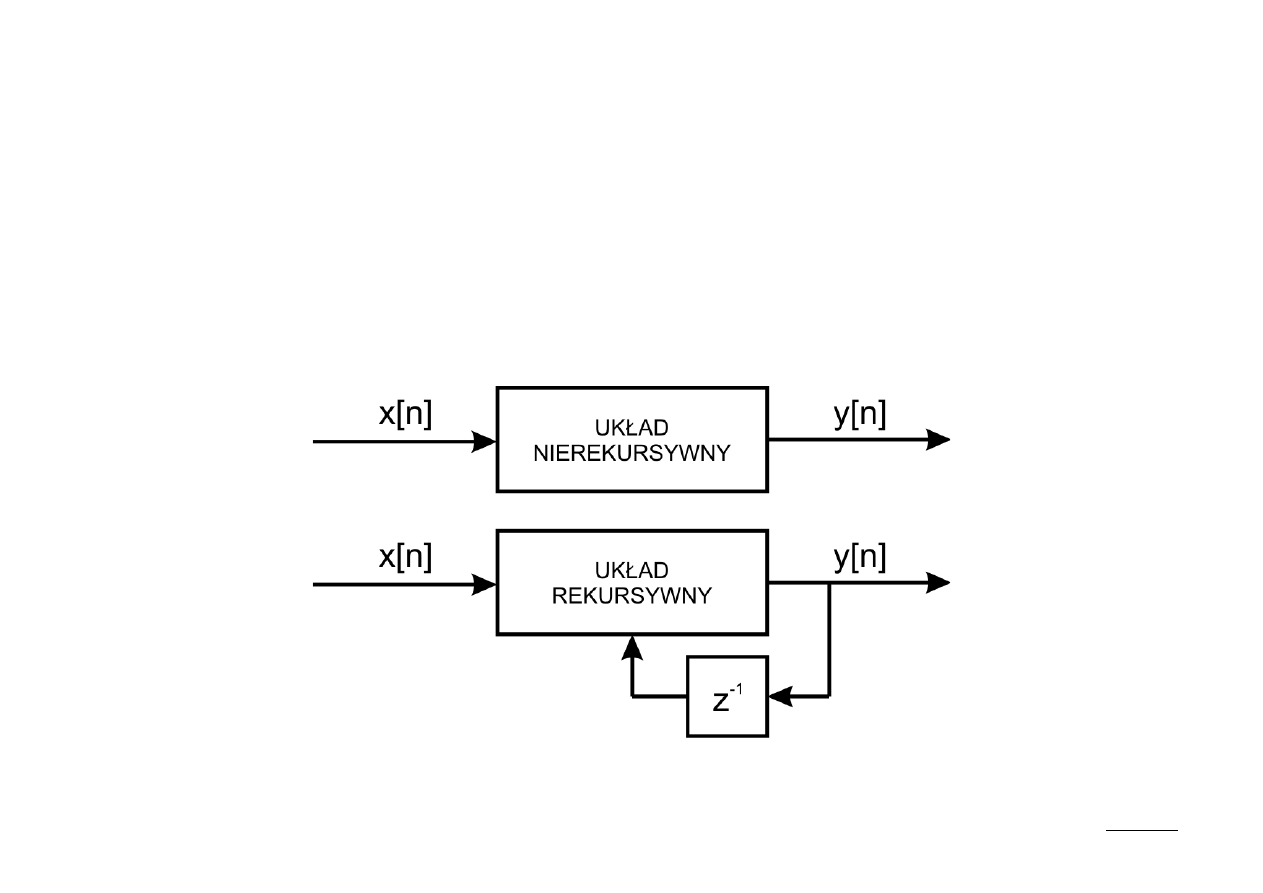
Rekursywne i nierekursywne układy czasu dyskretnego
Metoda splotowa jawnie wyraża odpowiedź układu LTI jako funkcję czystego
pobudzenia, jednak istnieją sytuacje, gdy niezbędne staje się wyrażenie
odpowiedzi układu także jako funkcji poprzednich próbek odpowiedzi. Z uwagi na
ten fakt układy czasu dyskretnego dzieli się na dwie zasadnicze grupy:
–
układy nierekursywne (nierekurencyjne), których odpowiedź jest funkcją
wyłącznie bieżącej i poprzednich próbek pobudzenia:
y [n]= f x [n] , x [n−1] , x [n−2] , ... , x [n−M ]
–
układy rekursywne (rekurencyjne), których odpowiedź jest funkcją bieżącej
oraz poprzednich próbek pobudzenia oraz poprzednich próbek odpowiedzi
(układy ze sprzężeniem zwrotnym):
y [n]= f y [n] , y [n−1] ,... , y [n− N ] , x [n] , x [n−1] ,... , x [n− M ]
24 (42)

Ex.: Układ liczący średnią skumulowaną:
y [n]=
1
n1
∑
k =0
n
x [k ]
Działanie układu w dotychczasowej formie wymaga zapamiętania całego
pobudzenia x[k], więc wielkość pamięci układu rośnie liniowo z wielkością n.
Przekształćmy powyższe wyrażenie:
n1⋅y [n]=
∑
k =0
n−1
x [k ]
x [n]=n⋅y [n−1] x [n]
Stąd otrzymujemy, że:
y [n]=
n
n1
y [ n−1]
1
n1
x [n]
Odpowiedź układu można zatem policzyć w sposób rekurencyjny (rekursywny)
znając wcześniejsze próbki odpowiedzi.
25 (42)
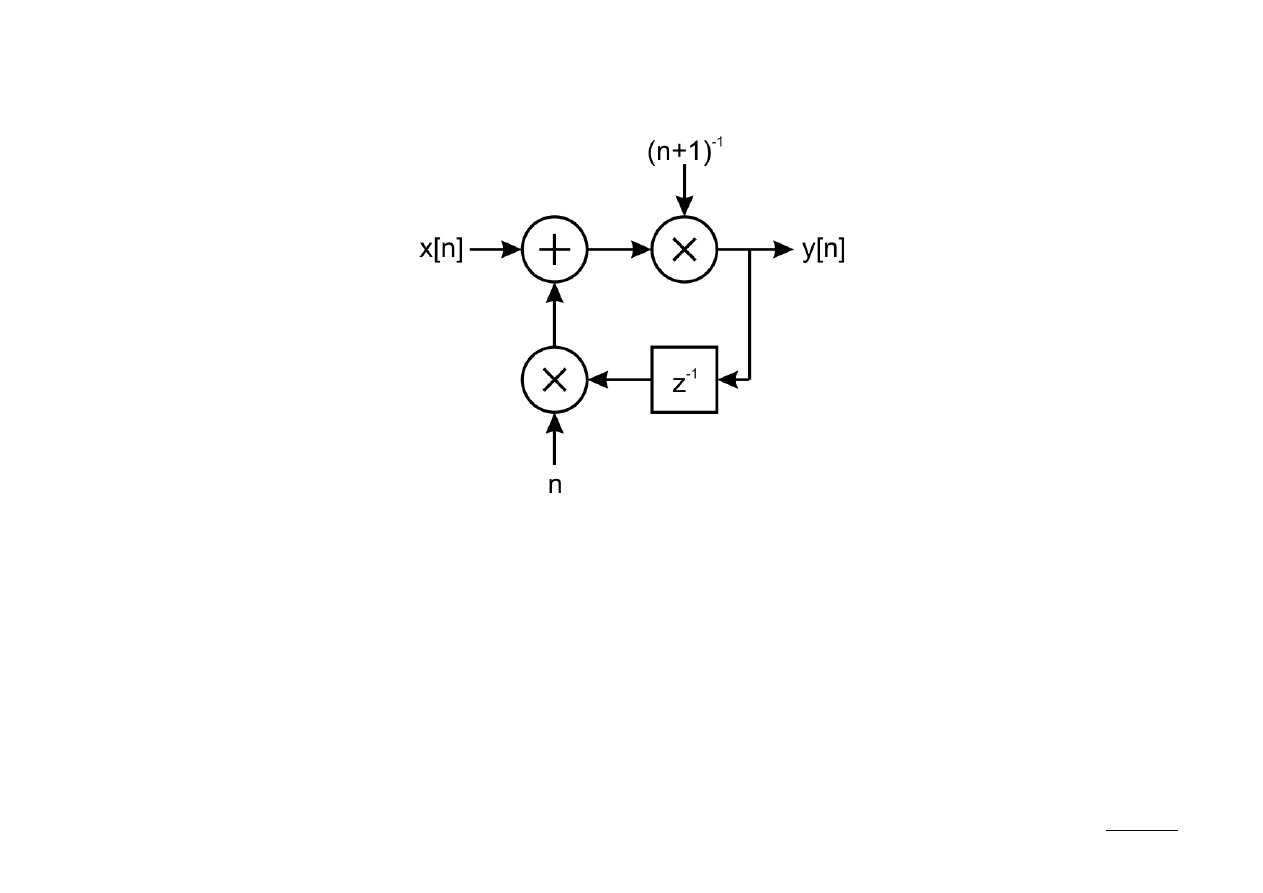
Schemat układu kumulatywnego uśredniania:
W tym przypadku, pomyślne kontynuowanie obliczeń od chwili k wymaga
przechowywania w pamięci ostatniej próbki odpowiedzi y[k-1] oraz bieżącej
i wszystkich przyszłych próbek pobudzenia x[n≥k].
Wartość y[k-1] nazywa się warunkiem początkowym – zawiera ona całą
dotychczasową historię układu, co pozwala pozbyć się wszystkich wcześniejszych
próbek pobudzenia.
26 (42)
Ex.: Nieliniowy układ rekursywny obliczający A
1/2
.
Algorytm iteracyjny ma postać:
s
n
=
1
2
s
n−1
A
s
n−1
n ∞
A , n=0,1 ,2 ,...
gdzie s
-1
jest zgrubnym oszacowaniem wartości A
1/2
.
Rozważmy układ rekursywny opisany równaniem:
y [n]=
1
2
y [n−1]
x [n]
y [ n−1]
Do zainicjowania układu wystarczy zgrubne oszacowanie wartości A
1/2
= y[-1]
(sprawdzić zbieżność układu dla A = 2 i y[-1] = 1 oraz y[-1] = 1.5) oraz podanie
pobudzenia w postaci: x[n] = A·u[n].
27 (42)
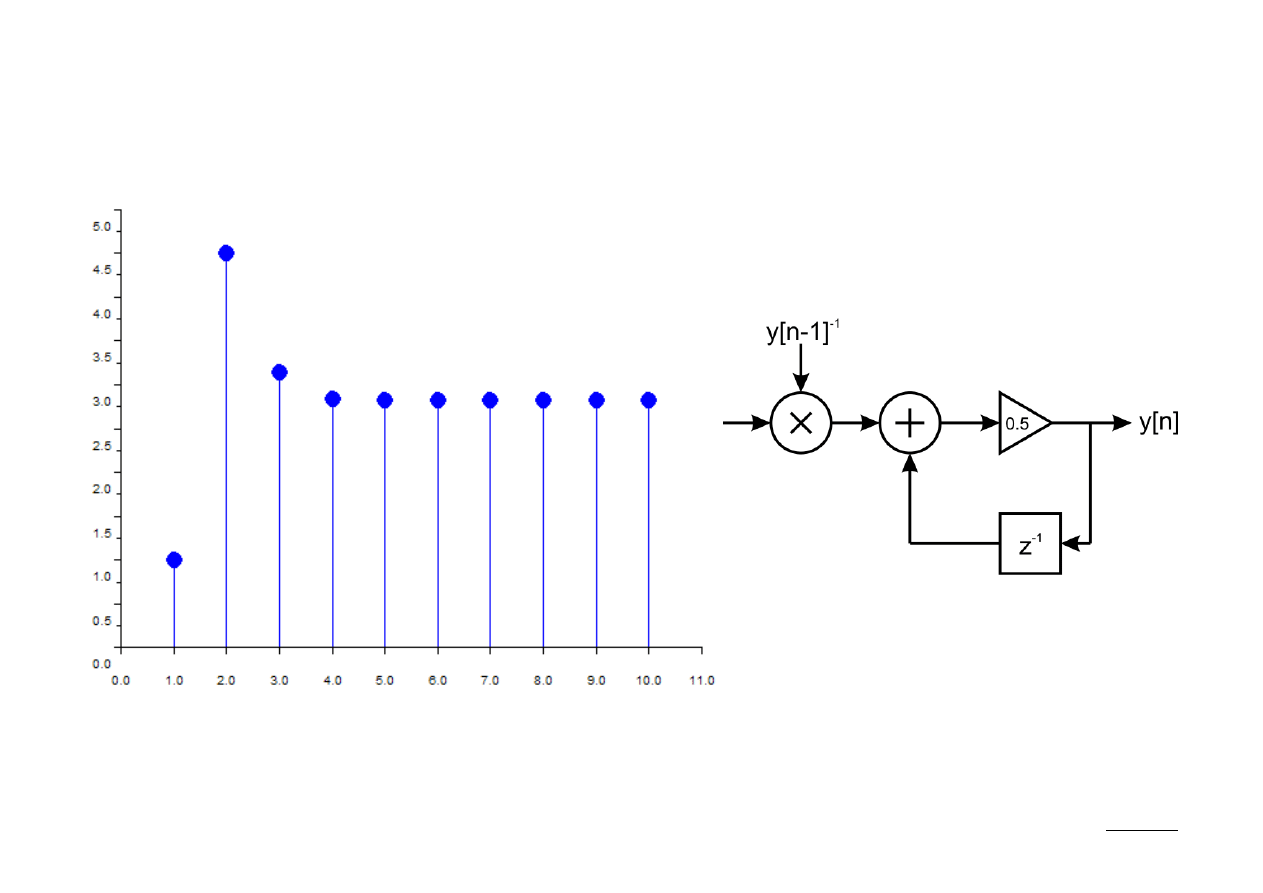
Odpowiedź układu i jego schemat dla A = 8
28 (42)
Sprzężenie zwrotne
Zasadnicza różnica pomiędzy układami rekursywnymi i nierekursywnymi zasadza
się na istnieniu pętli sprzężenia zwrotnego w układach rekursywnych,
zawierającej elementy opóźniające.
W układach czasu dyskretnego nie daje
się zrealizować sprzężenia zwrotnego bez opóźnienia.
29 (42)

Porządek odpowiedzi układów (nie-)rekursywnych
Kolejną istotną różnicą pomiędzy układami rekursywnymi i nierekursywnymi jest
kolejność wykonywania obliczeń odpowiedzi. W przypadku układów
nierekursywnych, w których odpowiedź jest funkcją wyłącznie próbek pobudzenia,
nie jest istotna kolejność obliczania próbek odpowiedzi, tzn. można liczyć np.:
y[10], y[1], y[5] itd.
W przypadku układów rekursywnych, których odpowiedź zależy od
wcześniejszych próbek odpowiedzi, prawidłowe działanie układu wymaga liczenia
próbek odpowiedzi w kolejności ich występowania, tzn.: y[0], y[1], y[2] itd.
30 (42)
Opis układów LTI przez równania różnicowe
o stałych współczynnikach
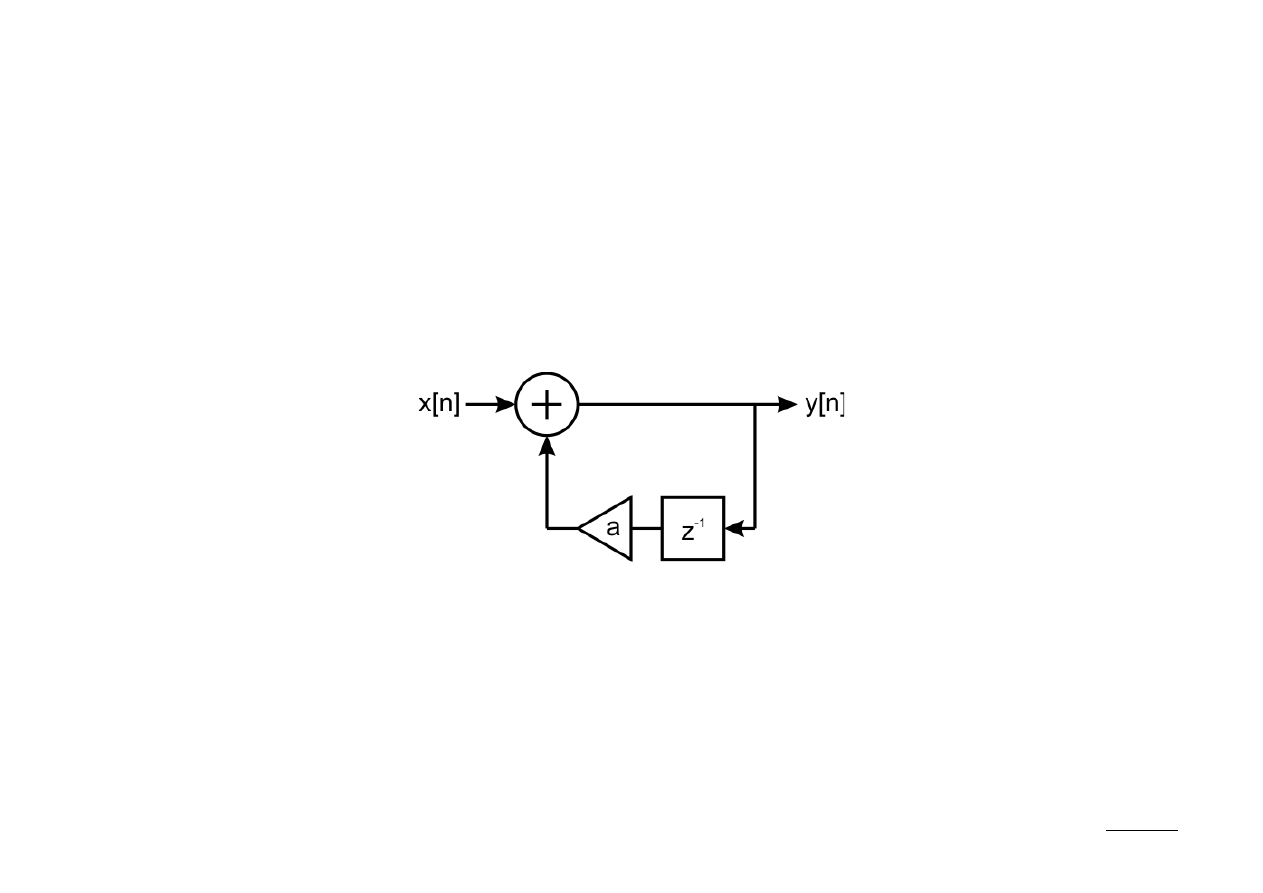
Załóżmy, że dany jest układ rekursywny opisany zależnością:
Jeśli współczynnik a = const., wówczas powyższe równanie opisuje układ LTI
(w przeciwieństwie np. do równania średniej skumulowanej opisującej układ LTV).
Doprowadźmy do układu w chwili n ≥ 0 pobudzenie x[n] – nie musimy znać
wcześniejszej historii x[n], o ile tylko znamy warunek początkowy y[-1].
31 (42)
y [n]=a⋅y [n−1] x [n]

Obliczmy jawną odpowiedź układu w dowolnej chwili n ≥ 0:
y [0]=a⋅y [−1] x [0]
y [1]=a⋅y [0]x [1]=a
2
⋅
y [−1]a⋅x [0] x [1]
⋮
y [n]=a
n1
⋅
y [−1]a
n
⋅
x [0]a
n−1
⋅
x [1]...x [ n]
W postaci zwięzłej:
y [n]=a
n1
⋅
y [−1]
∑
k =0
n
a
k
⋅
x [ n−k ] , n≥0
Otrzymana odpowiedź układu zawiera dwie części:
–
wyrażenie zawierające y[-1] przenosi warunek początkowy układu,
–
szereg zawierający odpowiedź układu na pobudzenie x[n].
32 (42)

Odpowiedź wymuszona układu rekursywnego
Jeśli układ jest w chwili n = 0 zrelaksowany, wówczas jego pamięć (wyjście
elementu opóźniającego) powinno być zerem. Mówimy wówczas, że układ jest
w stanie zerowym (spoczynkowym), zaś jego odpowiedź określana jest jako
odpowiedź spoczynkowa lub odpowiedź wymuszona y
zs
[n].
W przypadku analizowanego układu, jego odpowiedź wymuszona wynosi:
y
zs
[
n]=
∑
k =0
n
a
k
⋅
x [n−k ] , n≥0
Zauważmy, że powyższy wzór opisuje splot sygnału wejściowego z odpowiedzią
impulsową postaci:
h[n]=a
n
⋅
u[n]
Zrelaksowany, rekursywny układ opisany powyższym równaniem różnicowym jest
więc układem LTI typu IIR o odpowiedzi impulsowej h[n] = a
n
∙u[n].
33 (42)

Odpowiedź swobodna układu rekursywnego
Załóżmy obecnie, że analizowany układ nie jest zrelaksowany w chwili n = 0, tzn.,
że y[-1] ≠ 0 oraz, że pobudzenie jest równe zero (x[n] = 0 dla wszystkich n).
Odpowiedź układu na zerowe pobudzenie nazywana jest odpowiedzią zerową
lub odpowiedzią swobodną y
zi
[n]. W analizowanym przypadku:
y
zi
[
n]=a
n1
⋅
y [−1] , n≥0
Wynika stąd, że układ rekursywny nie jest zrelaksowany wówczas, gdy pomimo
braku pobudzenia, generuje niezerową odpowiedź. Odpowiedź swobodna układu
rekursywnego jest więc skutkiem istnienia pamięci układu.
34 (42)

Odpowiedź swobodna a wymuszona układu rekursywnego
Odpowiedź swobodna układu y
zi
[n] jest odpowiedzią na zerowe pobudzenie,
a więc wynika ona jedynie z charakterystyki układu oraz przyjętych warunków
początkowych. Z drugiej strony, odpowiedź wymuszona układu y
zs
[n] jest
odpowiedzią na jego konkretne pobudzenie przy braku wcześniejszej historii
(wyzerowana pamięć).
W ogólności, odpowiedź dowolnego układu rekursywnego można zawsze
przedstawić jako sumę odpowiedzi swobodnej i wymuszonej:
y [n]= y
zs
[
n] y
zi
[
n]
35 (42)

Ogólna postać równania różnicowego
Opisywany układ był najprostszym z całej klasy układów rekursywnych. Ogólna
postać liniowego równania różnicowego ze stałymi współczynnikami jest bowiem
następująca:
y [n]=−
∑
k=1
N
a
k
⋅
y [n−k ]
∑
k=0
M
b
k
⋅
x [n−k ]
Lub równoważnie:
∑
k=0
N
a
k
⋅
y [n−k ]=
∑
k =0
M
b
k
⋅
x [ n−k ]
gdzie: liczba N jest rzędem równania różnicowego lub też rzędem układu.
Odpowiedź układu rekursywnego w chwili n jest więc kombinacją liniową
wcześniejszych próbek odpowiedzi y[n-1], y[n-2], ..., y[n-N], jak też bieżącej
i wcześniejszych próbek pobudzenia x[n], x[n-1], ..., x[n-M].
36 (42)
Liniowość układów rekursywnych
Układ rekursywny jest liniowy, wtedy gdy jednocześnie spełnia nast. warunki:
(1) całkowita odpowiedź układu jest sumą odpowiedzi wymuszonej i swobodnej,
(2) odpowiedź wymuszona jest liniowa,
(3) odpowiedź swobodna jest liniowa.
Sprawdźmy liniowość układu opisanego równaniem:
y [n]=a⋅y [n−1] x [n]
Pokazaliśmy wcześniej, że:
y [n]=a
n1
⋅
y [−1]
∑
k =0
n
a
k
⋅
x [ n−k ]= y
zi
[
n] y
zs
[
n]
Co dowodzi własności (1).
37 (42)

Sprawdźmy teraz liniowość odpowiedzi wymuszonej. Niech:
x [n]=c
1
⋅
x
1
[
n]c
2
⋅
x
2
[
n]
Wówczas:
y
zs
[
n]=
∑
k =0
n
a
k
⋅
c
1
⋅
x
1
[
n−k ]c
2
⋅
x
2
[
n−k ]
=
...
...=c
1
∑
k =0
n
a
k
⋅
x
1
[
n−k ]c
2
∑
k =0
n
a
k
⋅
x
2
[
n−k ]=c
1
⋅
y
zs
1
c
2
⋅
y
zs
2
Co dowodzi liniowości odpowiedzi wymuszonej wymaganej przez (2).
38 (42)

W analogiczny sposób sprawdźmy liniowość odpowiedzi swobodnej. Niech:
y [−1]=c
1
⋅
y
1
[−
1]c
2
⋅
y
2
[−
1]
Wówczas odpowiedź swobodna wynosi:
y
zi
[
n]=a
n1
c
1
⋅
y
1
[−
1]c
2
⋅
y
2
[−
1]
=
c
1
⋅
a
n1
⋅
y
1
[−
1]c
2
⋅
a
n1
⋅
y
2
[−
1]=...
...=c
1
⋅
y
zi
1
[
n]c
2
⋅
y
zi
2[n]
Co dowodzi liniowości odpowiedzi swobodnej wyrażonej warunkiem (3).
Skoro analizowany układ spełnia wszystkie trzy warunki, jest on liniowy.
Otrzymany wynik można uogólnić na inne układy rekursywne opisywane liniowymi
równaniami różnicowymi, które spełniając wszystkie 3 podane warunki są liniowe.
39 (42)

Niezmienniczość w czasie układów rekursywnych
Powstaje kolejne pytanie: czy przyczynowy układ liniowy opisywany liniowym
równaniem różnicowym jest niezmienniczy w czasie?
Odpowiedź uzyskamy analizując jawną postać zależności wejściowo-wyjściowej
zdefiniowaną przez równanie różnicowe:
y [n]=−
∑
k=1
N
a
k
⋅
y [n−k ]
∑
k=0
M
b
k
⋅
x [n−k ]
Jeśli wszystkie współczynniki a
k
oraz b
k
są stałe, wówczas układ jest
niezmienniczy w czasie (TI), w przeciwnym wypadku układ nie jest niezmienniczy
w czasie (TV).
Układy rekursywne opisywane liniowymi równaniami różnicowymi o stałych
Układy rekursywne opisywane liniowymi równaniami różnicowymi o stałych
współczynnikach są więc układami LTI.
współczynnikach są więc układami LTI.
40 (42)

Stabilność układów rekursywnych
Dotychczasowa definicja stabilności w sensie BIBO wiązała ograniczoność
odpowiedzi z ograniczonością pobudzenia. W układach rekursywnych należy
jednak uwzględnić dodatkową stabilność związaną z pamięcią układu.
W przypadku rekursywnych układów LTI opisywanych liniowymi równaniami
różnicowymi o stałych współczynnikach wystarczającym warunkiem stabilności
w sensie BIBO jest, aby odpowiedź takiego układu była ograniczona dla
każdego ograniczonego pobudzenia oraz każdego ograniczonego warunku
początkowego.
41 (42)
Sprawdźmy stabilność układu analizowanego wcześniej. Niech:
∀
n≥0
x [n]≤ M
x
∞
Wówczas:
∣
y [n]∣≤∣a
n1
⋅
y [−1]∣∣
∑
k=0
n
a
k
⋅
x [n−k ]∣≤∣a∣
n1
⋅∣
y [−1]∣ M
x
∑
k =0
n
∣
a∣
k
≤
...
...≤∣a∣
n1
⋅∣
y [−1]∣M
x
1−∣a∣
n1
1−∣a∣
Wynika stąd, że układ jest stabilny tylko wówczas, gdy |a| < 1.
42 (42)
Wyszukiwarka
Podobne podstrony:
DSP Wyk%b3ad 04 UWM
DSP Wyk%b3ad 02 UWM
DSP Wyk%b3ad 08 UWM
DSP Wyk%b3ad 07 UWM
DSP Wyk%b3ad 11 UWM
DSP Wyk%b3ad 10 UWM
DSP Wyk%b3ad 09 UWM
DSP Wyk%B3ad 01 UWM
DSP Wyk%b3ad 03 UWM
DSP Wyk%b3ad 13 UWM
DSP Wyk%b3ad 06 UWM
DSP Wyk%b3ad 04 UWM
więcej podobnych podstron