AiR II rok czwartek nieparzysty
Podstawy automatyki - ćwiczenia
Lista nr 3
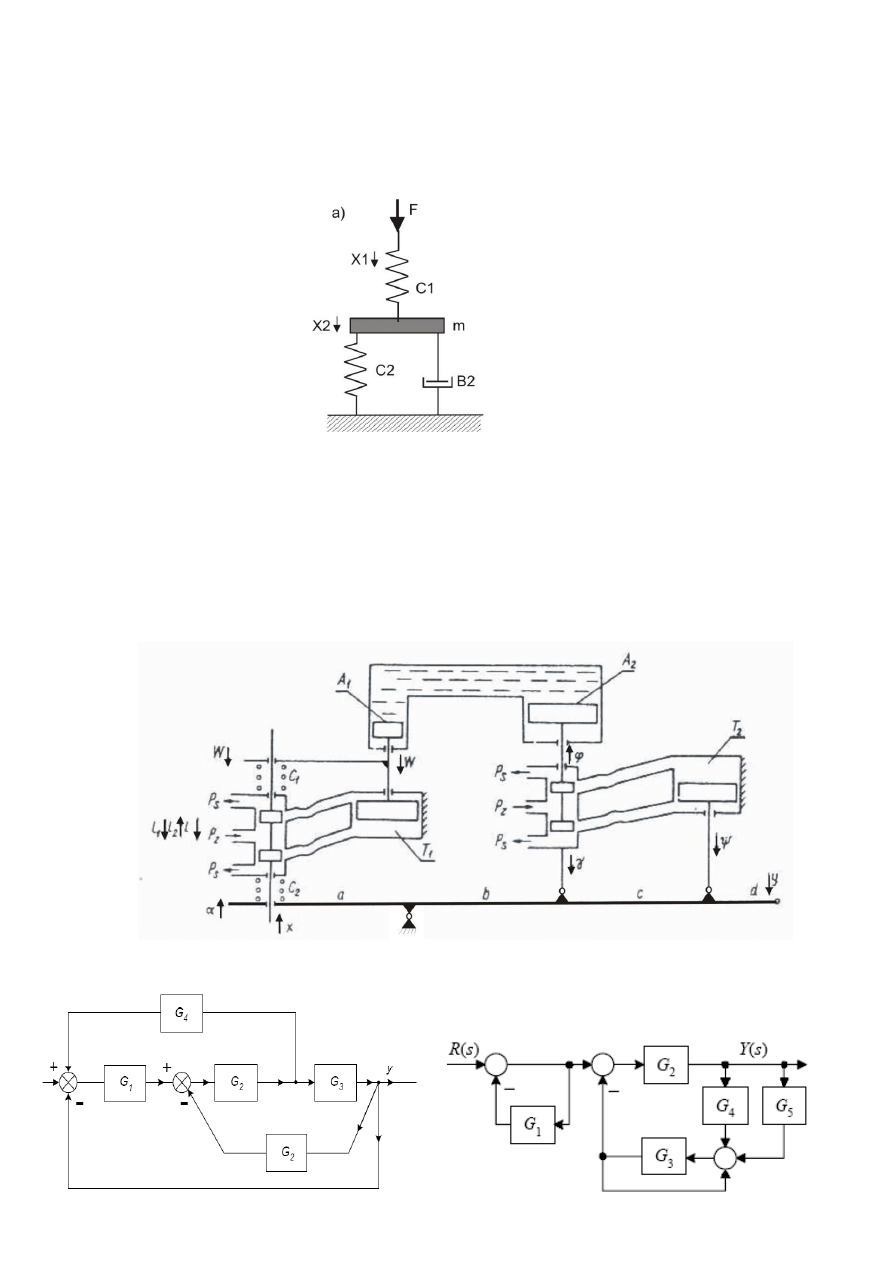
Zad 1. Wyznaczyć, korzystając z: a)zasady d’Alemberta, b) równań Lagrange’a, równanie dynamiki dla
podanego układu.
Następnie wyznaczyć transmitancję operatorową przyjmując:
wejście- siła F, wyjście – przesunięcie x2
00,
Zad. 2. Wyznaczyć schematat blokowy dla podanego układu, gdzie:
x- przesunięcie – sygnał wejściowy
y – przesunięcie - sygnał wyjściowy
l, l
1
, l
2
, w, α, γ, ψ, φ – przesuniecia
A1, A2 – pole powierzchni tłoków = const
P
z
, P
s
– ciśnienia – const
a, b, c, d – dlugości ramion dzwigni – const
T1,T2 – stałe czasowe zespołów: siłownik – zawór rozdzielający (człony całkujące)
Zad.3 Wyznaczyć transmitancję zastępczą dla poniższych schematów blokowych:
+
Wyszukiwarka
Podobne podstrony:
podstawy automatyki ćwiczenia lista nr 4b
podstawy automatyki ćwiczenia lista nr 4c
podstawy automatyki ćwiczenia lista nr 5b
podstawy automatyki ćwiczenia lista nr 3c
podstawy automatyki ćwiczenia lista nr 4d
podstawy automatyki ćwiczenia lista nr 4d
podstawy automatyki ćwiczenia lista nr 5a
podstawy automatyki ćwiczenia lista nr 1b
podstawy automatyki ćwiczenia lista nr 5a
podstawy automatyki ćwiczenia lista nr 4c
podstawy automatyki ćwiczenia lista nr 5b
podstawy automatyki ćwiczenia lista nr 2a
podstawy automatyki ćwiczenia lista nr 5a
podstawy automatyki ćwiczenia lista nr 4a
podstawy automatyki ćwiczenia lista nr 5b
podstawy automatyki ćwiczenia lista nr 1c
podstawy automatyki ćwiczenia lista nr 2b
podstawy automatyki ćwiczenia lista nr 1a
podstawy automatyki ćwiczenia lista nr 2d
więcej podobnych podstron