w w w. e l e k t r o . i n f o . p l
n r 7 - 8 / 2 0 0 5
d z i a ł
70
p r o j e k t
projekt instalacji silnika
trójfazowego klatkowego
mgr inż. Julian Wiatr, inż. Marcin Orzechowski
S
ilniki indukcyjne zwarte (klatkowe) mają najprostszą budowę spośród
wszystkich silników elektrycznych. Prosta jest również ich eksploatacja,
dlatego są one powszechnie stosowane w różnych układach napędowych.
Prędkość obrotową w tych silnikach można wyrazić następującym wzorem:
n
f
p
s
=
⋅
−
60
1
(
)
gdzie:
f – częstotliwość napięcia zasilającego, w [Hz],
p – liczba par biegunów silnika, w [-],
s – poślizg, w [-] ( może być również wyrażony w [%]).
Prędkość ta różni się od prędkości synchronicznej pola wirującego o wartość
poślizgu, która w silnikach indukcyjnych zwartych wynosi 1,5 – 5 %.
Prędkość obrotową w tego rodzaju silnikach możemy regulować zmieniając
częstotliwość napięcia zasilającego. Możliwa jest również zmiana prędkości
przez zmianę napięcia zasilającego, ale tylko „w dół”. Zwiększenie napięcia po-
wyżej wartości nominalnej grozi uszkodzeniem izolacji uzwojeń. Zmiany pręd-
kości obrotowej przez zmianę częstotliwości realizowane są z wykorzystaniem
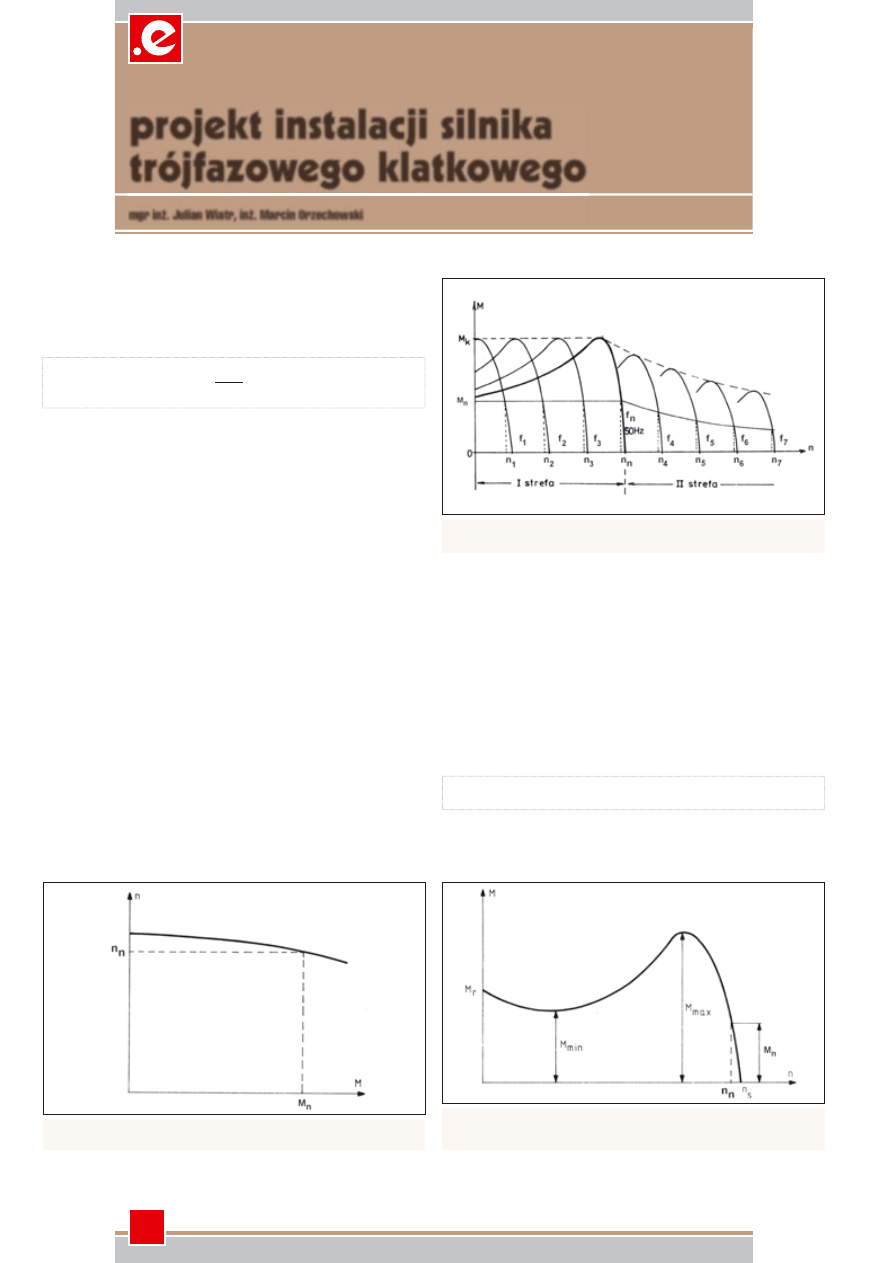
układów przekształtnikowych. Charakterystykę mechaniczną silnika klatko-
wego przy sterowaniu częstotliwościowym przedstawia
rysunek 1.
Z przedstawionej charakterystyki wynika, że zwiększanie częstotliwości
ponad wartość nominalną (50 Hz) wymaga również zwiększania napięcia
zasilającego, co jest niemożliwe ze względu na zwiększający się pobór prą-
du magnesującego, wzrost strat oraz niebezpieczeństwo uszkodzenia izola-
cji uzwojeń. Napięcie w II strefie sterowania nie może zatem ulec zwiększe-
niu ponad wartość nominalną. Zwiększenie częstotliwości powyżej wartości
nominalnej powoduje zmniejszenie momentu maksymalnego oraz momen-
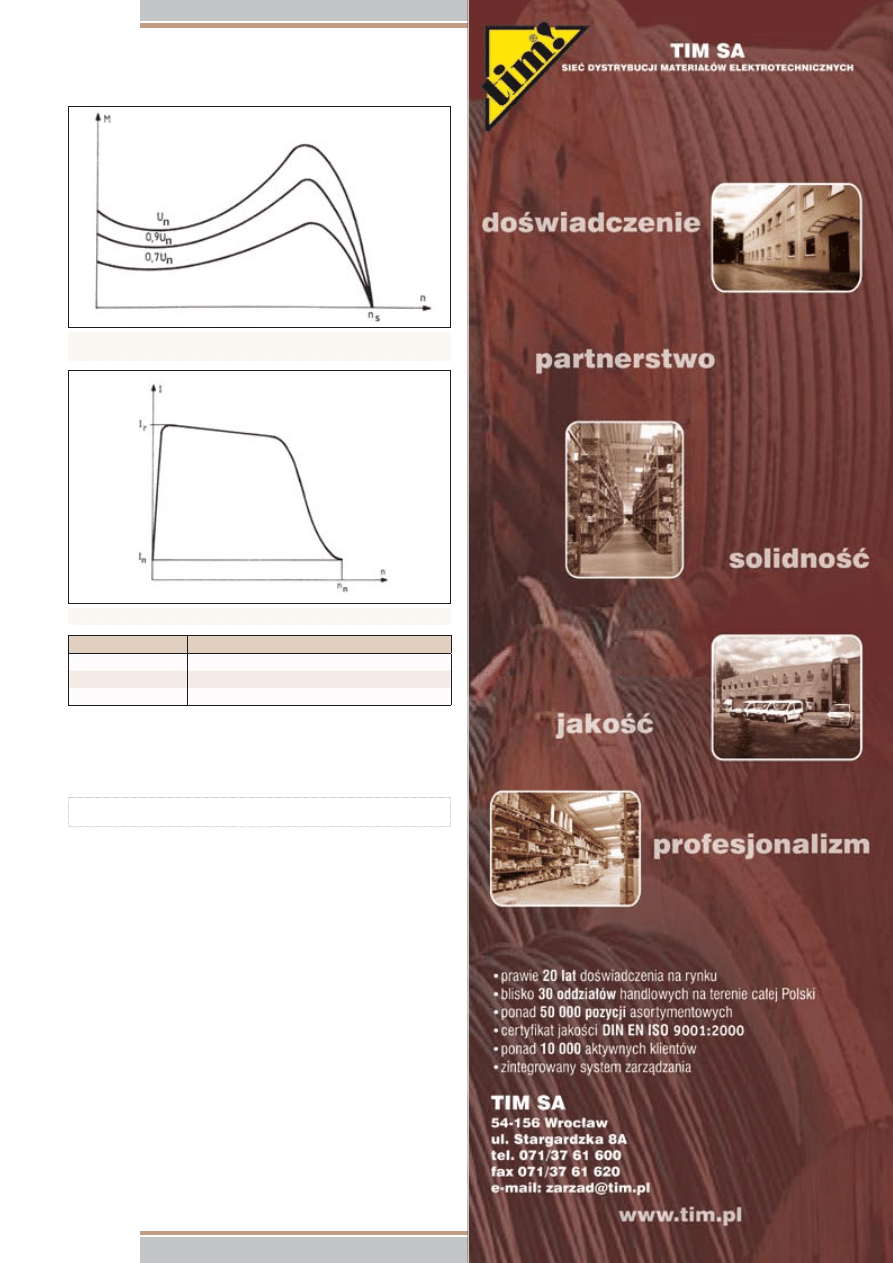
tu nominalnego. Wiele silników jest stosowanych w prostych układach napę-
dowych, gdzie silnik z napędzanym urządzeniem stanowi sztywne połącze-
nie (obrabiarki, piły tarczowe itp.). Prędkość obrotowa silnika w takich napę-
dach zmienia się w niewielkich granicach w zależności od obciążenia. Nato-
miast przekroczenie przez moment obciążenia wartości nominalnej momen-
tu obrotowego silnika skutkuje gwałtownym spadkiem prędkości obrotowej,
a tym samym zwiększeniem pobieranego z sieci prądu. Zależność prędkości
obrotowej silnika indukcyjnego zwartego od momentu obciążenia M
B
przed-
stawia
rysunek 2.
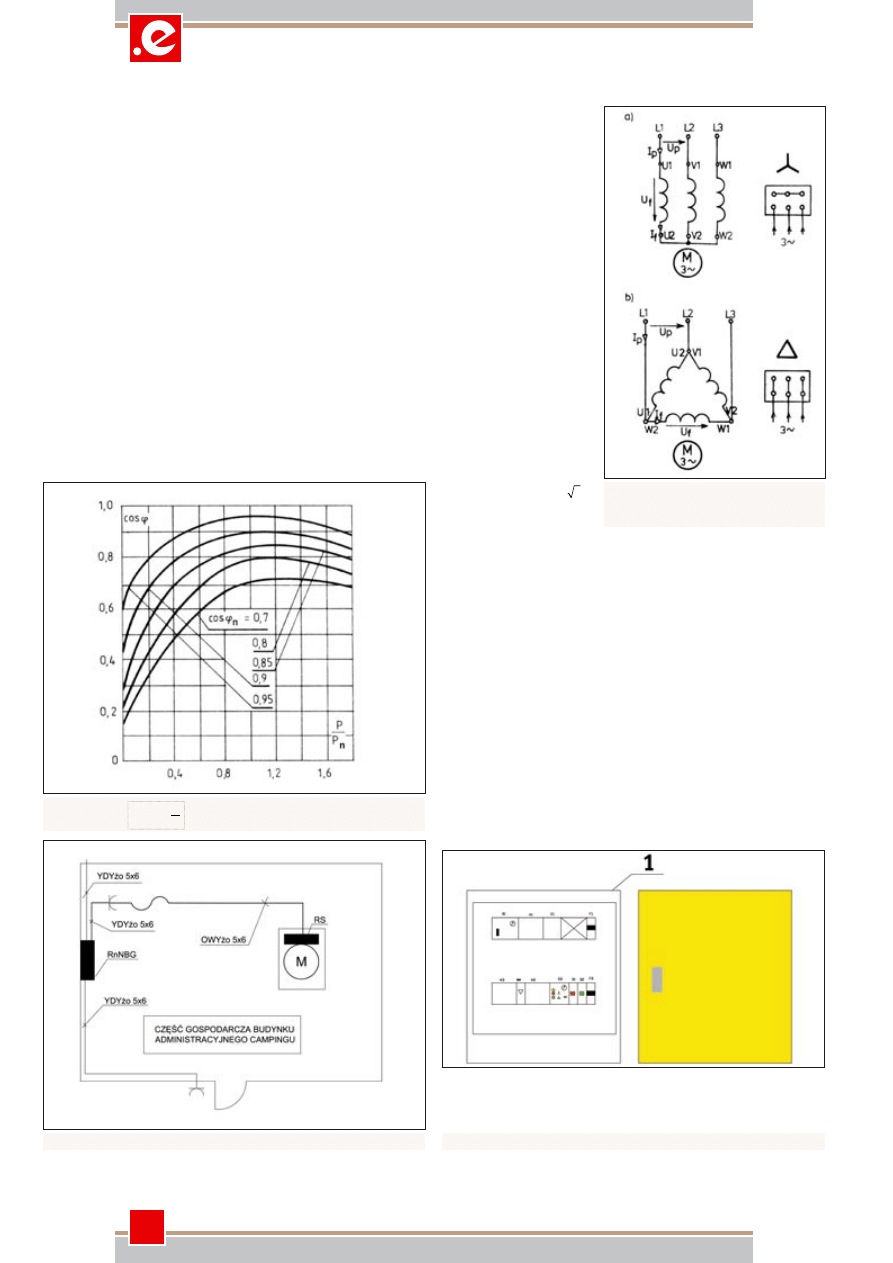
Moment obrotowy silnika indukcyjnego zwartego zależy od jego prędko-
ści obrotowej i może zostać przedstawiony w postaci charakterystyki M=f(n),
przedstawionej na
rysunku 3.
Urządzenie napędzane stawia opór w postaci momentu oporowego M
B
.
Warunek poprawnej pracy silnika jest spełniony, gdy zostanie zachowana
zależność:
M
S
≥M
B
gdzie:
M
s
– moment obrotowy silnika,
M
B
– moment oporowy (obciążenia).
Rys. 1 Charakterystyka mechaniczna silnika klatkowego przy dwustrefowym stero-
waniu częstotliwościowym [1]
Rys. 2 Zależność n=f(MB): M
n
– moment nominalny,
n
n
– nominalna prędkość ob-
rotowa silnika
Rys. 3 Zależność M=f(n): M
r
– moment rozruchowy,
M
min
– najmniejszy moment
obrotowy silnika,
M
max
– największy moment obrotowy silnika przy zasilaniu
napięciem nominalnym,
n
s
– prędkość synchroniczna [5]
w w w. e l e k t r o . i n f o . p l
n r 7 - 8 / 2 0 0 5
71
Moment obrotowy silnika indukcyjnego jest proporcjonalny do kwadratu
napięcia zasilającego, co można wyrazić następującą zależnością:
M= c⋅U
2
gdzie:
c – stała silnika.
Nieznaczne zmniejszenie napięcia zasilającego powoduje znaczne zmniej-
szenie momentu obrotowego silnika. Dla przykładu, zmniejszenie napięcia
zasilającego silnik zaledwie o 10 % powoduje zmniejszenie momentu obroto-
wego o 19 % (M=c⋅(0,9 U
n
)
2
=c⋅0,81 U
n
2
). Zmiana momentu obrotowego powo-
duje nieznaczne zmniejszenie prędkości obrotowej silnika, co skutkuje wzro-
stem prądu pobieranego ze źródła zasilającego.
Wzrost prądu powoduje zwiększenie strat oraz grzanie się uzwojeń, w skraj-
nym przypadku doprowadzające do zniszczenia izolacji uzwojeń i stwarzające
zagrożenie porażeniowe i pożarowe. Podobne skutki powoduje zwiększenie na-
pięcia ponad wartość nominalną. Dlatego też napięcie zasilające silnik induk-
cyjny musi spełniać warunek U
n
±5 %. Moment rozruchowy w silnikach klat-
kowych zawiera się w granicach 1,0 – 2,5 M
n
.
Zbyt niskie napięcie zasilające podczas rozruchu może uniemożliwiać uruchomie-
nie silnika. Problemy te pojawiają się szczególnie wtedy, gdy moment rozruchowy
jest nieznacznie większy od momentu oporowego (obciążenie). W takim przypadku
Rodzaj rozruchu silnika Dopuszczalna wartość spadku napięcia
∆
U, w [%]
Rozruch lekki
35
Rozruch ciężki, rzadki
15
Rozruch ciężki, częsty
10
Tab. 1 Dopuszczalne wartości spadków napięć podczas rozruchu silnika indukcyjne-
go klatkowego
Rys. 4 Charakterystyki momentu obrotowego silnika indukcyjnego klatkowego dla
różnych wartości napięcia zasilającego
Rys. 5 Charakterystyka prądu rozruchowego silnika indukcyjnego klatkowego [5]
w w w. e l e k t r o . i n f o . p l
n r 7 - 8 / 2 0 0 5
p r o j e k t
72
nawet nieznaczne obniżenie napięcia zasilającego może uniemożliwić uruchomie-
nie silnika lub znacznie przedłużyć jego rozruch i w konsekwencji skutkować nad-
miernym nagrzaniem izolacji uzwojeń lub zniszczeniem silnika.
Niekorzystną cechą silników klatkowych jest ich duży prąd rozruchowy,
który wynosi (4 – 8) I
n
(gdzie: I
n
– prąd nominalny silnika, w [A]), w zależno-
ści od mocy oraz konstrukcji silnika.
Duży prąd rozruchowy wynika z fizyki działania silnika. W chwili załączenia
napięcia zasilającego silnik, jedynym oporem dla płynącego prądu są niewiel-
kie rezystancje uzwojeń stojana. Wraz z upływem czasu indukuje się w nich
siła elektromotoryczna przeciwindukcji i wartość płynącego przez uzwojenia
prądu ulega stabilizacji. Uzyskanie wartości nominalnej jest uzależnione od
prędkości obrotowej silnika, co zostało przedstawione na
rysunku 5.
Wartość prądu rozruchowego ulega zmniejszeniu wraz z upływem czasu, aż
w końcu ulega stabilizacji na poziomie wartości I
n
, co następuje po osiągnięciu
przez silnik nominalnej prędkości obrotowej. Na uwagę zasługuje fakt, że obcią-
żenie silnika nie wpływa na wartość prądu rozruchowego, a jedynie na czas trwa-
nia rozruchu. Czas rozruchu dłuższy niż 15 sekund [5] może być powodem nad-
miernego wzrostu temperatury uzwojeń, co powinno być uwzględnione podczas
projektowania instalacji zasilającej silnik. Zgodnie z aktualną wiedzą techniczną,
w silnikach klatkowych o mo-
cy większej niż 5 kW należy
stosować układy rozruchowe
ze względu na silne obciąża-
nie sieci zasilającej i negatyw-
ny wpływ na odbiorniki wraż-
liwe na spadki napięć spowo-
dowane prądami rozruchowy-
mi (np. żarówki, itp.).
Spośród kilku stosowanych
sposobów rozruchu, najbardziej
popularnym jest rozruch silni-
ka w układzie przełącznika
gwiazda/trójkąt. Wówczas roz-
ruch silnika odbywa się począt-
kowo przy połączeniu uzwojeń
stojana w gwiazdę, a następnie
przełącza się je do połączenia
w trójkąt. W czasie rozruchu
uzwojenia silnika zasilane są
napięciem mniejszym o
3
,
dlatego prądy pobierane z sieci
zasilającej są trzykrotnie mniej-
sze. Skutkuje to również trzykrotnie mniejszym momentem rozruchowym, co
sprawia, że rozruch ten jest stosowany przy rozruchu silników nieobciążonych
(tzw. rozruch lekki).
W niektórych przypadkach rozruch silnika musi odbywać się przy obcią-
żeniu, które niejednokrotnie jest dość duże (napęd windy, pompy głębinowe,
itp.). Wówczas stosuje się silniki o innej konstrukcji (dwuklatkowe lub głębo-
kożłobkowe), w których współczynnik prądu rozruchowego k
r
≤3, dzięki cze-
mu nie ma potrzeby stosowania układów rozruchowych. W takich silnikach
moment rozruchowy jest znacznie większy niż w silnikach o wykonaniu nor-
malnym. Czytelników zainteresowanych tą problematyką zachęcamy do przej-
rzenia literatury wyszczególnionej na
www.elektro.info.pl.
Podczas projektowania instalacji zasilającej silnik należy pamiętać, że współ-
czynnik mocy biernej silnika podczas rozruchu znacznie się różni od wartości
nominalnej. Ma on duży wpływ na wartość spadku napięcia w przewodach
zasilających silnik. Można go wyrazić następującą zależnością:
Rys. 7 Zależność
cos = f
ϕ
⋅( )
P
P
n
silnika indukcyjnego klatkowego [5]
Rys. 8 Plan instalacji
Rys. 11 Schemat montażowy RS
Objaśnienia: 1 – nieprzewodząca obudowa o pojemności 24 moduły IP55. Uwaga,
przyciski sterownicze wł/wy zostały zainstalowane w rozdzielnicy do celów dydak-
tycznych. Przy realizacji projektu należałoby je umieścić w osobnej obudowie o stop-
niu szczelności IP55
Rys. 6 Połączenia uzwojeń silnika klatkowe-
go przy rozruchu z przełączaniem gwiaz-
da/trójkąt
w w w. e l e k t r o . i n f o . p l
n r 7 - 8 / 2 0 0 5
73
cos
cos
(
,
)
ϕ
ϕ η
r
n
n
n
Mr
r
r
s
k
k
k
=
−
+
⋅
1
0 025
gdzie:
s
n
– poślizg nominalny silnika, w [-],
η
n
– sprawność nominalna silnika, w [-],
k
I
I
r
r
n
=
- krotność prądu rozruchowego silnika, w [-],
k
M
M
Mr
r
n
=
- krotność momentu rozruchowego silnika, w [-],
cosϕ
n
– nominalny współczynnik mocy biernej silnika, w [-].
Wartość tego współczynnika zawiera się w przedziale 0,1÷0,4 i zależy od
mocy silnika i jego konstrukcji. Zależność współczynnika mocy biernej silni-
ka klatkowego w zależności od obciążenia przedstawia
rysunek 7.
Podczas projektowania instalacji zasilającej silnik należy dobrać przewody za-
silające na długotrwałą obciążalność prądową i przeciążalność na warunek zwar-
ciowy, warunek samoczynnego wyłączenia oraz spadek napięcia. Przy doborze sil-
ników należy jednak pamiętać, by pracowały one odpowiednio obciążone (opty-
malne obciążenie występuje wówczas, gdy moment obciążenia M
B
jest nieznacz-
nie mniejszy lub równy momentowi nominalnemu silnika M
n
). Silnik obciążo-
ny momentem niższym niż znamionowy powoduje pobór większej mocy bier-
nej w stosunku do jej wartości nominalnej. Szczególnie duża wartość mocy bier-
nej jest pobierana przez silnik pracujący w stanie jałowym, dlatego należy unikać
długotrwałej pracy silników na biegu jałowym
(rys. 7). Zjawisko to powoduje ko-
nieczność stosowania nadążnej kompensacji mocy biernej w obiektach, w których
występuje duża liczba silników (zakłady produkcyjne, lotniska itp.).
Częstym błędem popełnianym przez projektantów instalacji jest pomija-
nie w obliczeniach warunku spadku napięcia w przewodach zasilających sil-
nik podczas jego rozruchu. Podczas prowadzenia obliczeń związanych z do-
borem przewodów zasilających silnik oraz ich zabezpieczeń, należy przepro-
wadzić obliczenia spadku napięcia dla dwóch przypadków:
a) w czasie rozruchu:
∆
∆
U
U
R
X
I
U
n
r
r
r
dop
=
⋅
⋅
− ⋅
⋅ ≤
100 3
( cos
sin )
ϕ
ϕ
gdzie:
R – rezystancja obwodu zwarciowego, w [Ω],
Rys. 12 Diagram czasowy rozruchu i zatrzymania silnika
reklama
w w w. e l e k t r o . i n f o . p l
n r 7 - 8 / 2 0 0 5
p r o j e k t
74
X – reaktancja obwodu zwarciowego, [Ω],
sin
cos
ϕ
ϕ
r
r
=
−
1
2
, w [-].
b) w warunkach normalnej pracy (po zakończonym rozruchu):
∆U
P L
S U
n
n
= ⋅ ⋅
⋅ ⋅
≤
100
5
2
%
%
γ
Tym razem prezentujemy przykładowy projekt zasilania silnika klatkowe-
go stosowanego do celów gospodarczych. Prezentowana instalacja stanowi
fragment projektu, jaki przygotowaliśmy dla Państwa z okazji targów ENER-
GETAB 2005, który obejmuje zasilanie pola kempingowego. Przyjęte w opra-
cowaniu parametry obwodu zwarciowego zostały zaczerpnięte z projektu za-
sadniczego. Projekt ten w całości będzie prezentowany w numerze 9/2005
i nr 10/2005 „elektro.info”. Silnik stanowi wyposażenie części gospodarczej
budynku administracyjnego pola kempingowego.
dane wyjściowe
Obiekt jest zasilany przez budynkową stację transformatorową 15 / 04 kV,
wyposażoną w transformator o mocy 160 kVA. Budynek administracyjny
jest zasilany ze stacji transformatorowej kablem YAKXS 4×25 o długości
50 m. RnNBG zasilana jest z RGnNBA przewodem YDYżo 5×6 o długości
10 m. R
T
=0,0162 [Ω] – rezystancja transformatora zasilającego obiekt,
X
T
=0,0467 [Ω] – reaktancja transformatora zasilającego obiekt, R
YAKXS
4×25; dł. 50 m=0,0570 [Ω] – rezystancja linii zasilającej budynek biu-
rowy obiektu, R
nNBG(3)
=0,1035 [Ω] – rezystancja dla zwarć symetrycz-
nych w rozdzielnicy nN zainstalowanej w części gospodarczej budynku
biurowego, R
nNBG(1)
=0,1908 [Ω] – rezystancja dla zwarć jednofazowych
w rozdzielnicy nN zainstalowanej w części gospodarczej budynku biuro-
wego, X
nNBG(3)
=0,0467 [Ω] – reaktancja dla zwarć symetrycznych w roz-
dzielnicy nN zainstalowanej w części gospodarczej budynku biurowe-
go, X
nNBG(3)
=X
nNBG(1)
=0,0467 [Ω]. R
RGBA(3)
=0,0732 [Ω] – rezystancja dla
zwarć symetrycznych w rozdzielnicy głównej budynku administracyjne-
go, R
RGBAG(1)
=0,1302 [Ω] – rezystancja dla zwarć jednofazowych w roz-
dzielnicy głównej budynku administracyjnego, X
RGBA(3)
=0,0467 [Ω] – re-
aktancja dla zwarć symetrycznych w rozdzielnicy głównej budynku ad-
ministracyjnego, X
RGBA(3)
=X
RGBA(1)
=0,0467 [Ω] jak wyżej, lecz dla zwarć
jednofazowych.
Silnik: P=7,5 kW; s
n
=2 %; U
n
=3×230 /400 V; k
Mr
=2,3; k
r
=7; cosϕ
n
=0,8;
η
n
=0,9, n
n
=1470 obr./min (podstawa: katalog producenta silników induk-
cyjnych klatkowych).
opis techniczny
W pomieszczeniu gospodarczym zainstalowana jest rozdzielnica RnNBG,
z której zasilany jest silnik indukcyjny klatkowy. Plan instalacji przedstawia
rysunek 8, schemat zasilania oraz automatyki rozruchowej przedstawia ry-
sunek 9 (www.elektro.info.pl). Na rysunku 10 zaprezentowano schemat ste-
rowania układu rozruchu silnika
(www.elektro.info.pl). Skrzynkę RS należy
zainstalować na konstrukcji nośnej maszyny napędzanej przez silnik. Zasila-
nie RS należy wykonać przewodem OWYżo 5×6.
obliczenia
Prąd nominalny silnika oraz wartość nastawy zabezpieczenia przeciążeniowego:
I
P
U
A
I
k I
n
n
n
n
r
r
n
=
⋅
⋅
⋅
=
⋅
⋅
⋅
=
= ⋅ = ⋅
3
7500
3 400 0 8 0 9
15 04
7 15 04
cos
,
,
,
,
ϕ η
==
= ⋅ = ⋅
=
105 28
11
11 15 04 16 54
,
,
,
,
,
A
I
I
A
n
ϑ
Należy zatem przyjąć wartość nastawy zabezpieczenia przeciążeniowego
silnika I
ϑ
=16,50 A. Na podstawie katalogu produktów firmy Legrand FAEL
należy przyjąć zabezpieczenie silnika typu M250 1r/1z 20 A oraz stycznik SM
340S – 4Z. Zabezpieczenie główne obwodu silnika: α=3 - współczynnik roz-
ruchu (rozruch lekki).
I
k I
A
ns
r
B
≥ ⋅ = ⋅
≈
α
7 15 04
3
35 1
,
,
Należy przyjąć zabezpieczenie WTN00gG50 (stanowi ono jednocześnie głów-
ne zabezpieczenie RnNBG).
Prąd zwarcia symetrycznego w RnNBG:
I
c U
Z
A
I
I
k
n
k
r
k
3
3
3
3
1 400
3 0 114
2025 79
100
105 28
2025
"
"
,
,
%
,
=
⋅
⋅
=
⋅
⋅
=
⋅
=
,,
%
, %
%
79
100
5 19
5
⋅
=
>
Zgodnie z zaleceniami, o których pisaliśmy w nr 11/2004, należy uwzględ-
nić w obliczeniach zwarciowych oddziaływanie silnika podczas wybiegu. Za-
tem całkowity prąd zwarcia symetrycznego wyniesie:
I = I + I = 2025,79 +105,28 = 2131,07 A
k3c
"
k3c
"
r
Natomiast przy zwarciu w RGBA prąd ten nie ma dużego znaczenia, ponieważ:
I
c U
Z
A
I
I
k
n
k
r
k
3
3
3
3
1 400
3 0 0732
3154 92
100
105 28
315
"
"
,
,
%
,
=
⋅
⋅
=
⋅
⋅
=
⋅
=
44 92
100
3 34
5
,
%
, %
%
⋅
=
<
Wymagany przekrój przewodu zasilającego silnik ze względu na prąd zwar-
cia symetrycznego (
Uwaga! Ponieważ przy spodziewanym prądzie zwarcio-
wym I
k3
”
=3154,92 A (w RnNBA: I
k3
”
=2131,07 A) czas wyłączenia zabezpiecze-
nia będzie krótszy od 0,1 s, w celu wyznaczenia wymaganego przekroju prze-
wodu zasilającego należy posłużyć się wartością całki Joule’a, jaką może prze-
nieść bezpiecznik topikowy WTN00gG50 przy spodziewanym prądzie zwar-
ciowym):
S
k
I t
mm
w
≥
=
=
1
1
1
135
13700
1
0 87
2
2
,
sprawdzenie dobranego przewodu na długotrwałą obciążalność i przecią-
żalność prądową (zabezpieczeniem głównym silnika jest jednocześnie za-
bezpieczenie główne RnNBA zainstalowane w RGBA, w RnNBG w torze za-
silana silnika ze względów eksploatacyjnych został zainstalowany tylko
rozłącznik):
I
A I
A I
I
k I
A
B
n
Z
Z
n
=
≤ ≤
≤
≥
⋅ = ⋅ =
15 04
50
1 45
1 6 50
1 45
55 17
2
,
,
,
,
,
w w w. e l e k t r o . i n f o . p l
n r 7 - 8 / 2 0 0 5
75
Na podstawie PN-IEC 60364-5-523 warunki spełnia przewód OWYżo 5×6,
którego I
dd
=56 A≥I
z
.
sprawdzenie dobranego przewodu na spadki napięcia:
a) w czasie rozruchu:
∆U
U
R
X
I
n
r
r
r
=
⋅
⋅
+ ⋅
⋅ =
=
⋅
⋅
+
⋅
100 3
100 3
400
0 134 0 37 0 93 0
( cos
sin )
( ,
,
,
ϕ
ϕ
,,
, )
,
, %
%
cos
cos
(
,
0467 0 93
105 28
4 23
35
1
0
⋅
⋅
⋅
==
<<
=
−
+
ϕ
ϕ η
r
n
n
n
Mr
r
s
k
k
0025
0 8
0 9
1 0 02
2 3
7
0 025 7
0 37
1
2
⋅
=
=
−
+
⋅
=
=
−
k
r
r
)
,
,
,
,
,
,
sin
cos
ϕ
ϕ
rr
=
−
=
1 0 37
0 93
2
,
,
Uwaga, do obliczeń zostały przyjęte parametry obwodu zwarciowego uwzględniają-
ce rezystancję i reaktancję uzwojeń transformatora zasilającego teren kempingu:
b) w warunkach normalnej pracy:
∆U
P L
S U
n
m
= ⋅ ⋅
⋅ ⋅
=
⋅ ⋅
⋅ ⋅
+
+
⋅ ⋅
100
18900 50 100
35 25 400
10000 10 100
2
2
%
%
%
γ
555 6 400
7500 10 100
55 6 400
1
2
2
⋅ ⋅
+
⋅ ⋅
⋅ ⋅
=
%
%
sprawdzenie samoczynnego wyłączenia podczas zwarć jednofazowych:
Z
X
R
X
R
R
R
R
k
k
k
kT
kT
AKXS x
YDYzo x
OWYzo x
1
1
2
1
2
2
4 25
5 6
5 6
2
=
+
=
+
+ ⋅
+
+
[
]
[
(
))
[ ,
]
[ ,
( ,
,
,
)
,
2
2
2
1
0 0467
0 0162 2 0 0570 0 0303 0 0303
0 256
=
=
+
+ ⋅
+
+
=
Ω
I
k
""
"
,
,
,
,
=
⋅
=
⋅
=
=
⋅ = ⋅
=
<
=
0 8
0 8 230
0 256
718 75
14 20 280
0
1
1
U
Z
A
I
k I
A I
k
w
w
n
k
7718 75
,
A
gdzie:
k
w
– krotność prądu nominalnego zabezpieczenia silnika zapewniająca wyłączenie
zasilania podczas zwarć w czasie określonym przez PN-IEC 60364-4-41, w [-],
I
”
k1
– prąd zwarcia jednofazowego, w [A],
U
0
– napięcie fazowe, w [V],
Warunek samoczynnego wyłączenia podczas zwarć jednofazowych w silniku
zostanie zachowany zgodnie z wymaganiami PN-IEC 60364-4-41.
Uwaga, na podstawie katalogu producenta zastosowanych aparatów zabez-
pieczających należy uznać, że podczas zwarć jednofazowych w silniku zosta-
nie również zachowana selektywność zadziałania zabezpieczeń. Dla połącze-
nia kaskadowego bezpieczników topikowych WTN00gG50 z wyłącznikiem sil-
nikowym M250 selektywność zostanie zachowana dla prądów zwarciowych
nieprzekraczających 1250 A. Po wykonaniu prac instalacyjnych należy prze-
prowadzić pomiary i próby odbiorcze zgodnie z PN-IEC 60364-6-61.
Od redakcji: Literatura do projektu na www.elektro.info.pl.
Zestawienie materiałów
1. przewód OWYżo 5×6 – 10 m, 2. stycznik SM340 230-4 Z – 3 szt., 3. prze-
łącznik gwiazda/trójkąt A190 prod. ELESTER – 1 szt., 4. rygiel mechanicz-
ny dla styczników – 1 szt., 5. łącznik przyciskowy LP301 – 1 szt., 6. łącznik
przyciskowy LP302 – 1 szt., 7. gniazdo trójfazowe I
n
=32 A nieprzewodzące
– 1 szt., 8. skrzynka montażowa IP55 o pojemności 24 moduły
(rys. 11), 9.
wyłącznik silnikowy M250 1r/1z 20 A; I
δ
=(14 – 20) A – 1 szt., 10. pozostałe
drobne materiały według potrzeb.
Wyszukiwarka
Podobne podstrony:
ei 2005 07 08 s085 id 154185 Nieznany
ei 2005 07 08 s033 id 154176 Nieznany
ei 2005 07 08 s060
ei 2005 07 08 s010
ei 2005 07 08 s083
ei 2005 07 08 s076
ei 2005 07 08 s050 id 154178 Nieznany
ei 2005 07 08 s079
ei 2005 07 08 s084 id 154184 Nieznany
ei 2005 07 08 s063
ei 2005 07 08 s040
ei 2005 07 08 s052 id 154179 Nieznany
ei 2005 07 08 s006
ei 2005 07 08 s048
ei 2005 07 08 s038
ei 2005 07 08 s029
ei 2005 07 08 s004
ei 2005 07 08 s020 id 154175 Nieznany
ei 2005 07 08 s030
więcej podobnych podstron