
(6) Moment pędu
• moment pędu – definicja
• druga zasada dynamiki dla ruchu
obrotowego.
• moment bezwładności
• ruch w polu sił centralnych
• bryła sztywna
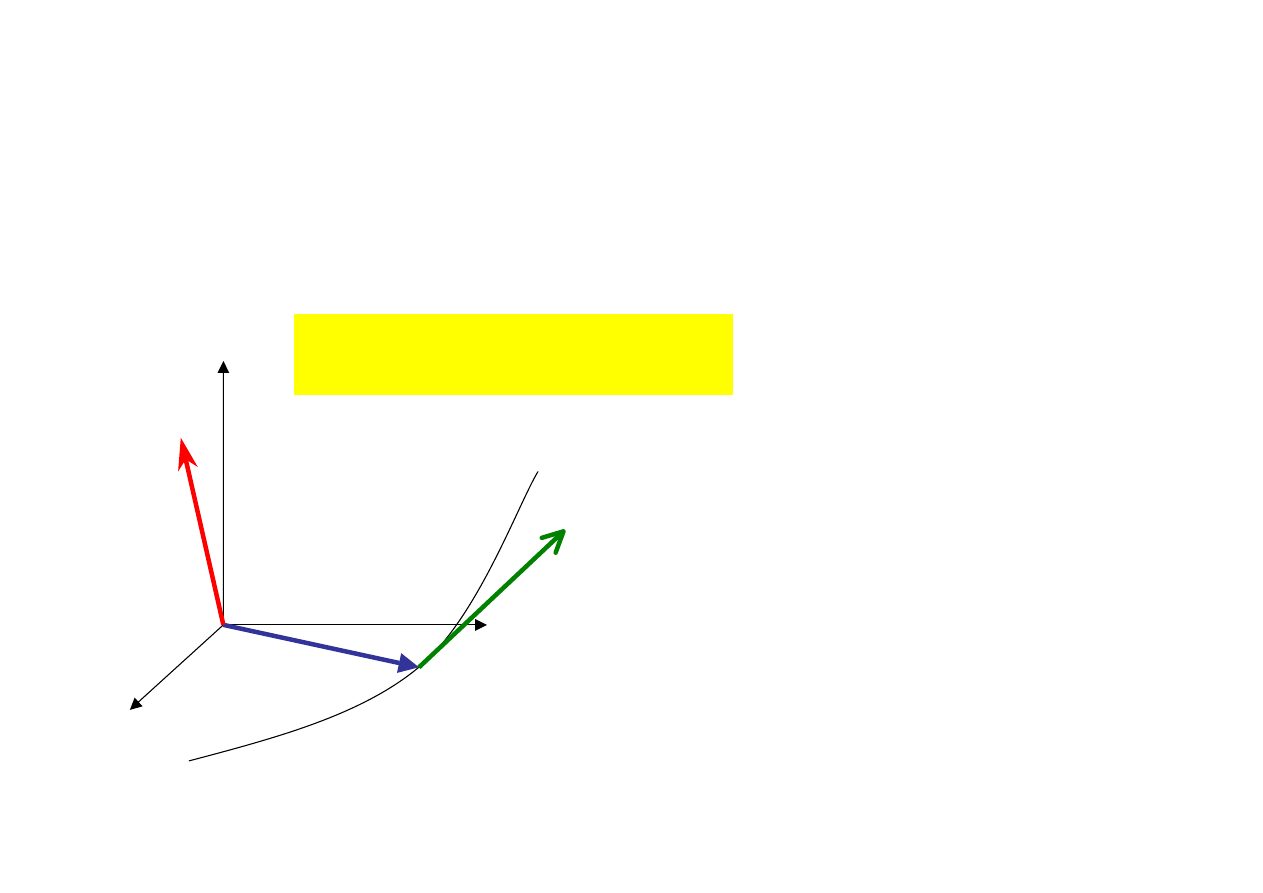
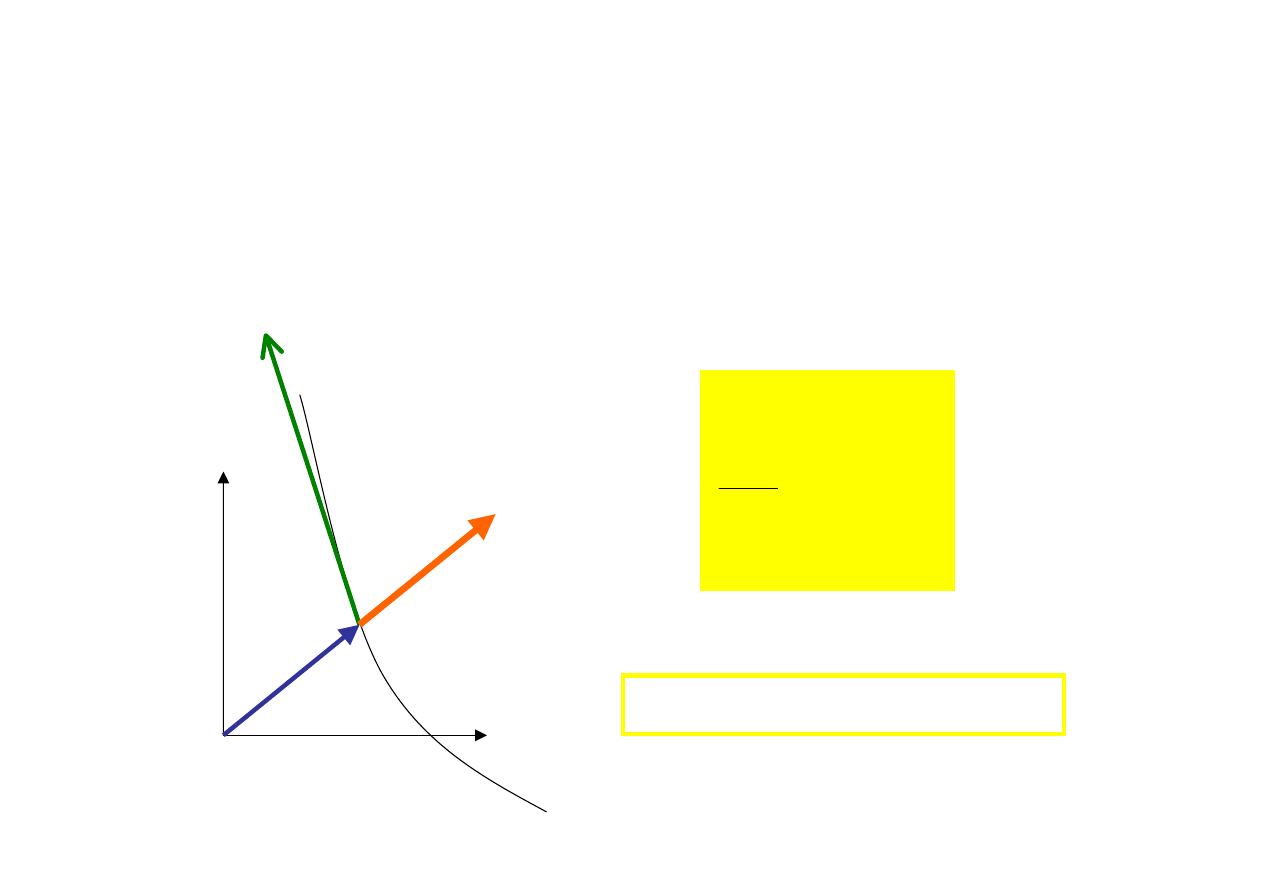
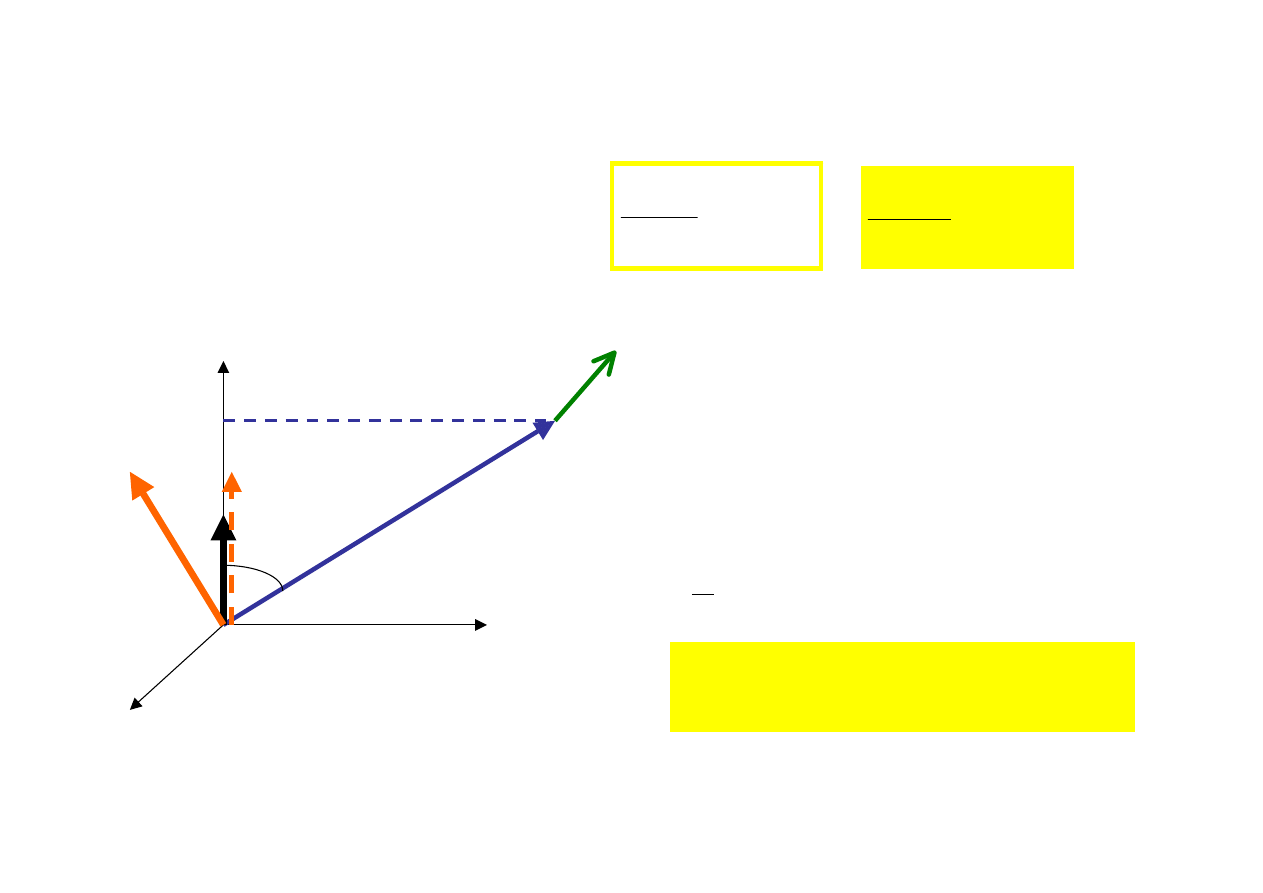
Moment pędu punktu materialnego
względem środka układu odniesienia.
x
y
z
r
L
v
r
p
r
L
m
×
=
×
≡
p=mv
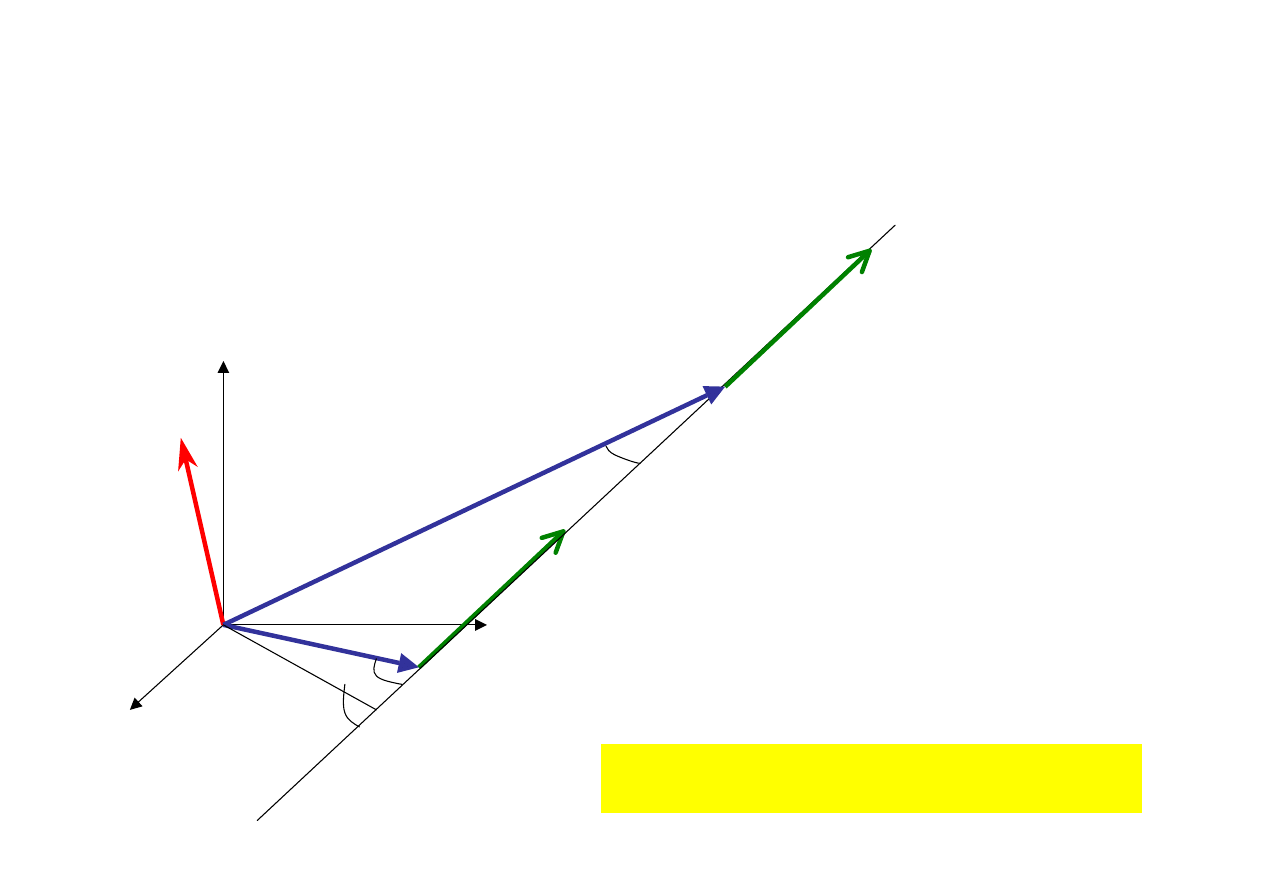
Moment pędu cząstki swobodnej.
-
parametr zderzenia: r
0
=r sin
α
x
y
z
r
p=mv
const
v
r
p
r
L
=
×
=
×
≡
m
p=mv
r’
( )
( )
( )
const
mvr
L
const
t
t
r
=
=
=
⊥
α
α
sin
sin
v
r,
L
α
sin
r
α
′
α
•
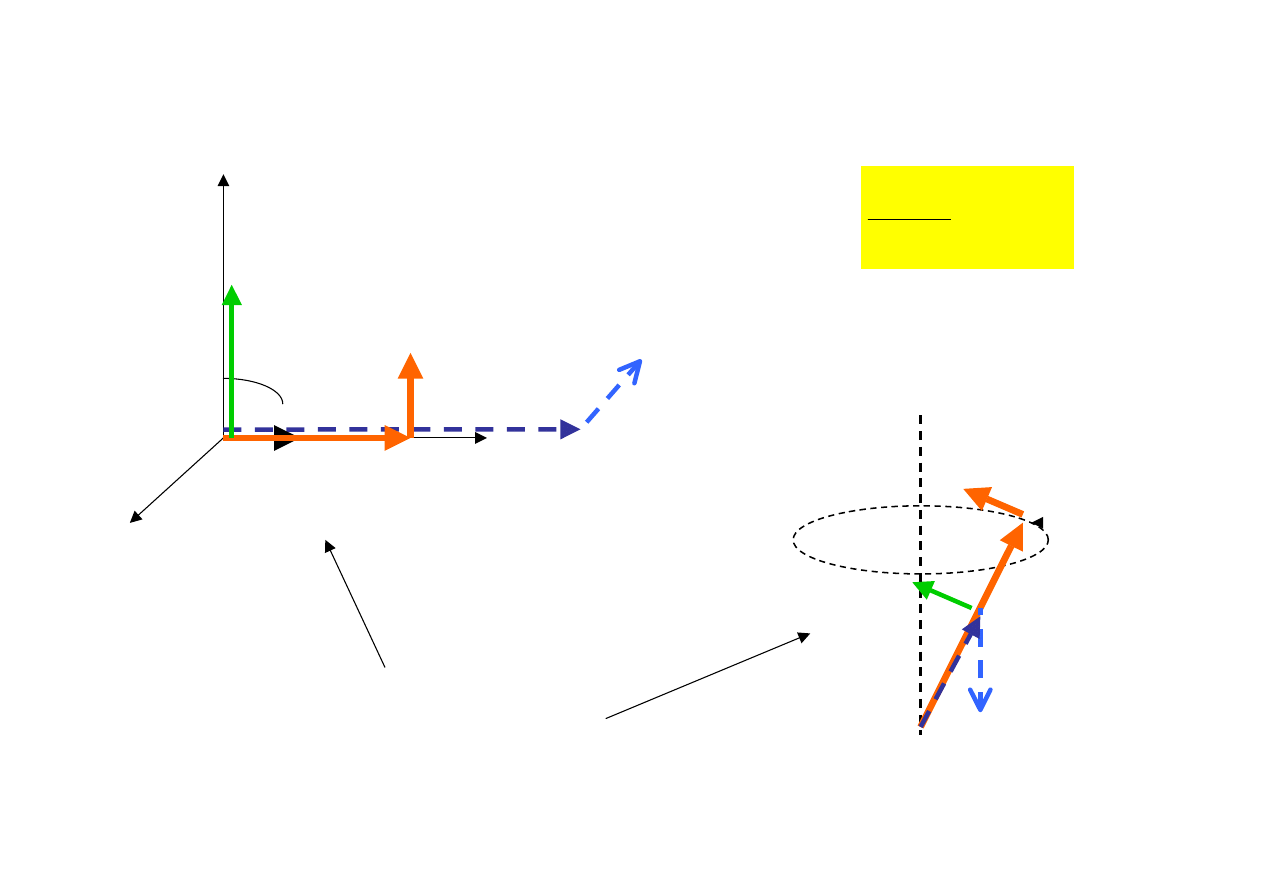
L
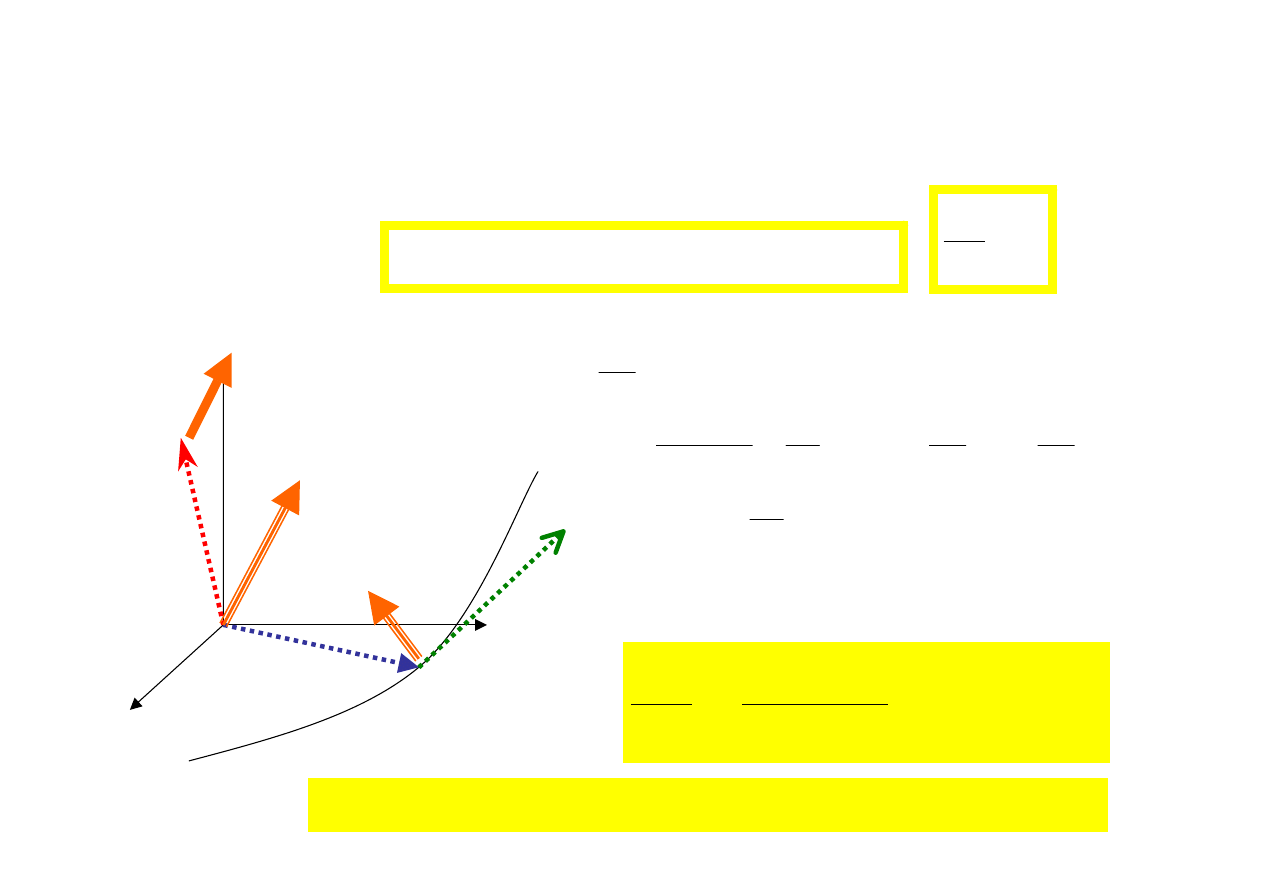
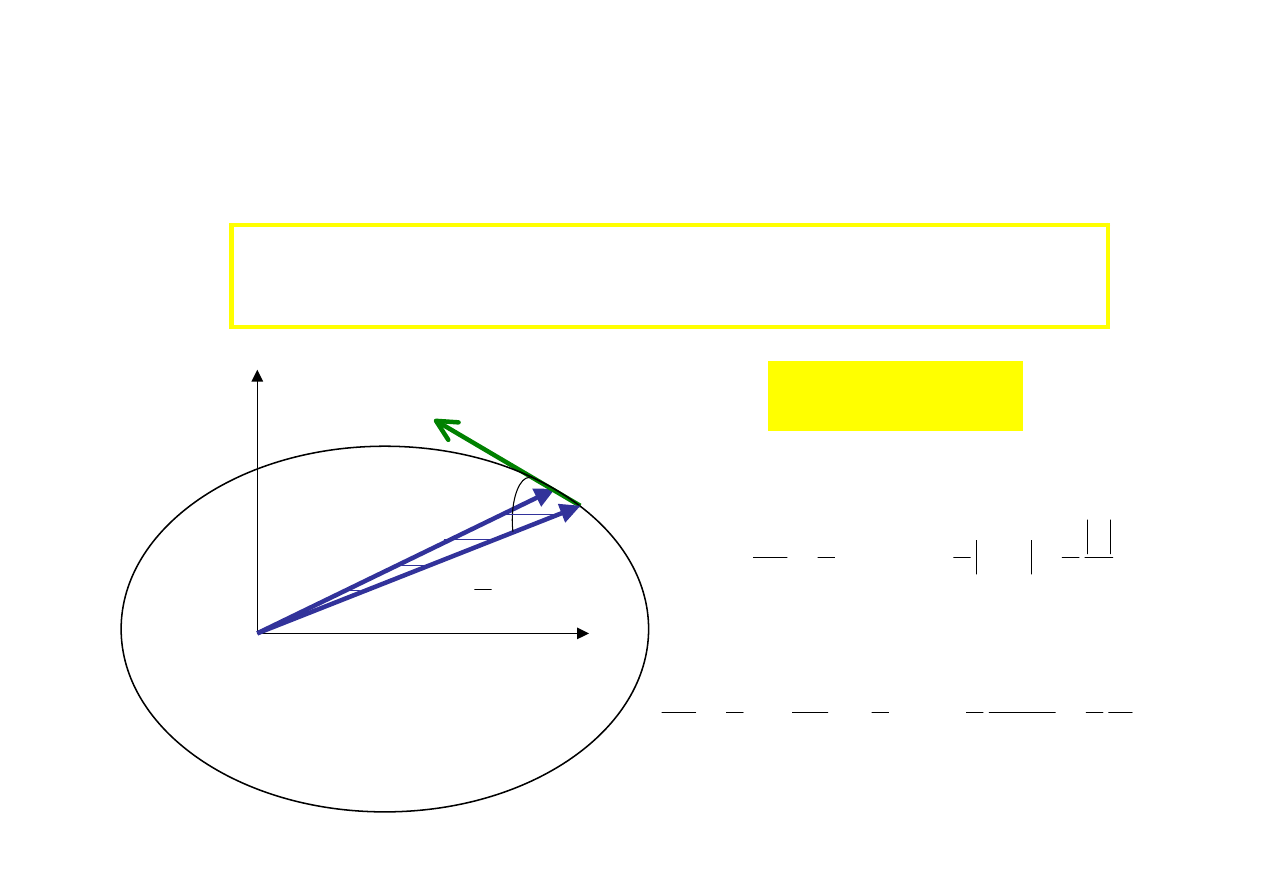
zmiana momentu pędu punktu
materialnego pod działaniem siły, F.
F
p
=
dt
d
Siła prowadzi do zmiany pędu
x
z
y
r
L
(
)
T
F
r
p
r
L
=
×
=
×
≡
dt
d
dt
d
p=mv
F
(
)
0
=
×
=
×
×
=
×
+
×
=
×
×
=
×
v
v
p
r
p
r
p
r
p
r
p
r
F
r
p
r
m
dt
d
dt
d
dt
d
dt
d
dt
d
dt
d
T=r
×F
dL/dt
Moment siły prowadzi do zmiany momentu pędu
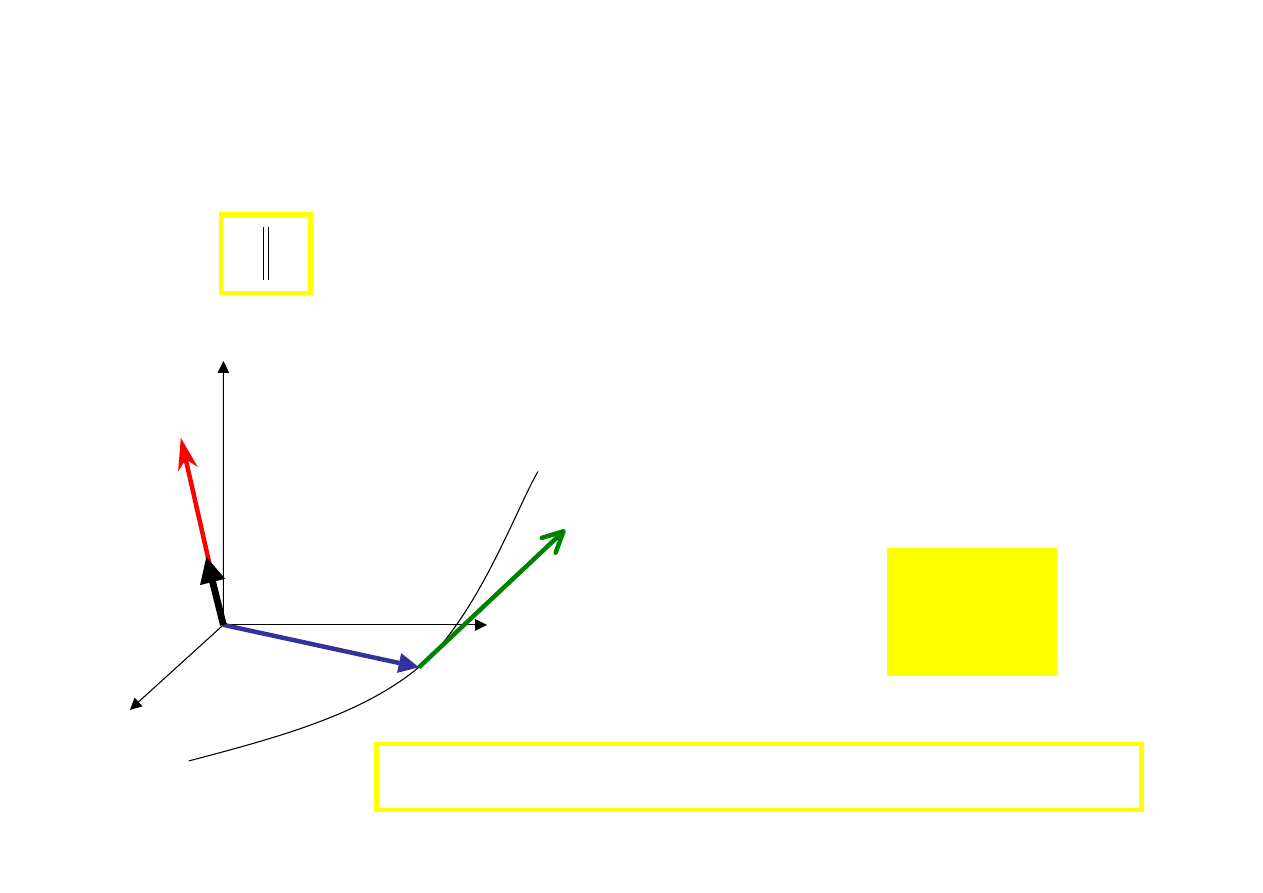
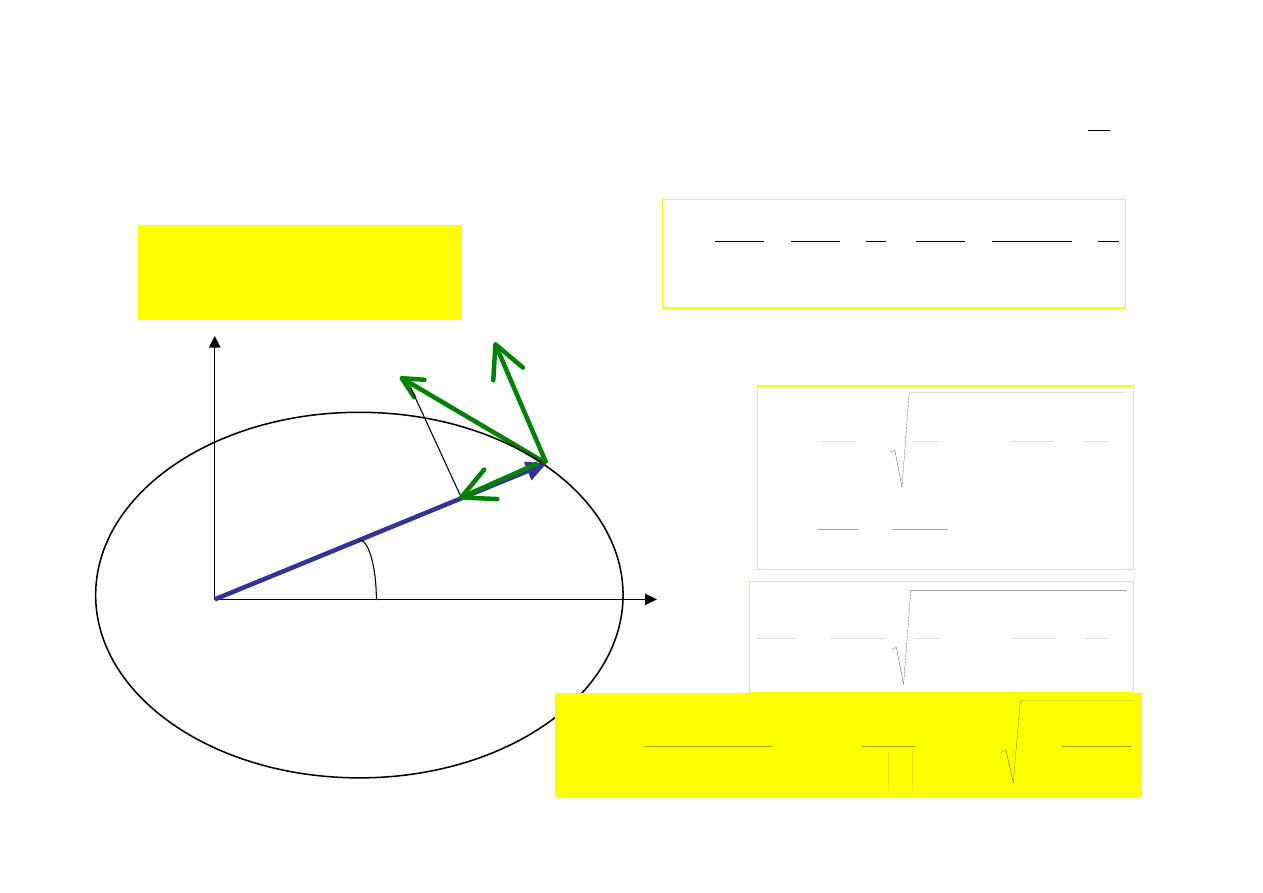
Moment bezwładności.
(
)
ω
r
ω
r
L
2
mr
m
=
×
×
=
L
ω
v
r
L
r
ω
v
×
=
×
=
m
bo:
x
y
z
r
L
2
mr
I
I
≡
= ω
L
p=mv
ω
(
) (
) (
)
0
=
⋅
⇒
⊥
⋅
−
⋅
≡
×
×
ω
r
ω
r
B
A
C
B
A
B
C
B
A
I
-moment bezwładności względem osi (
ω,L)
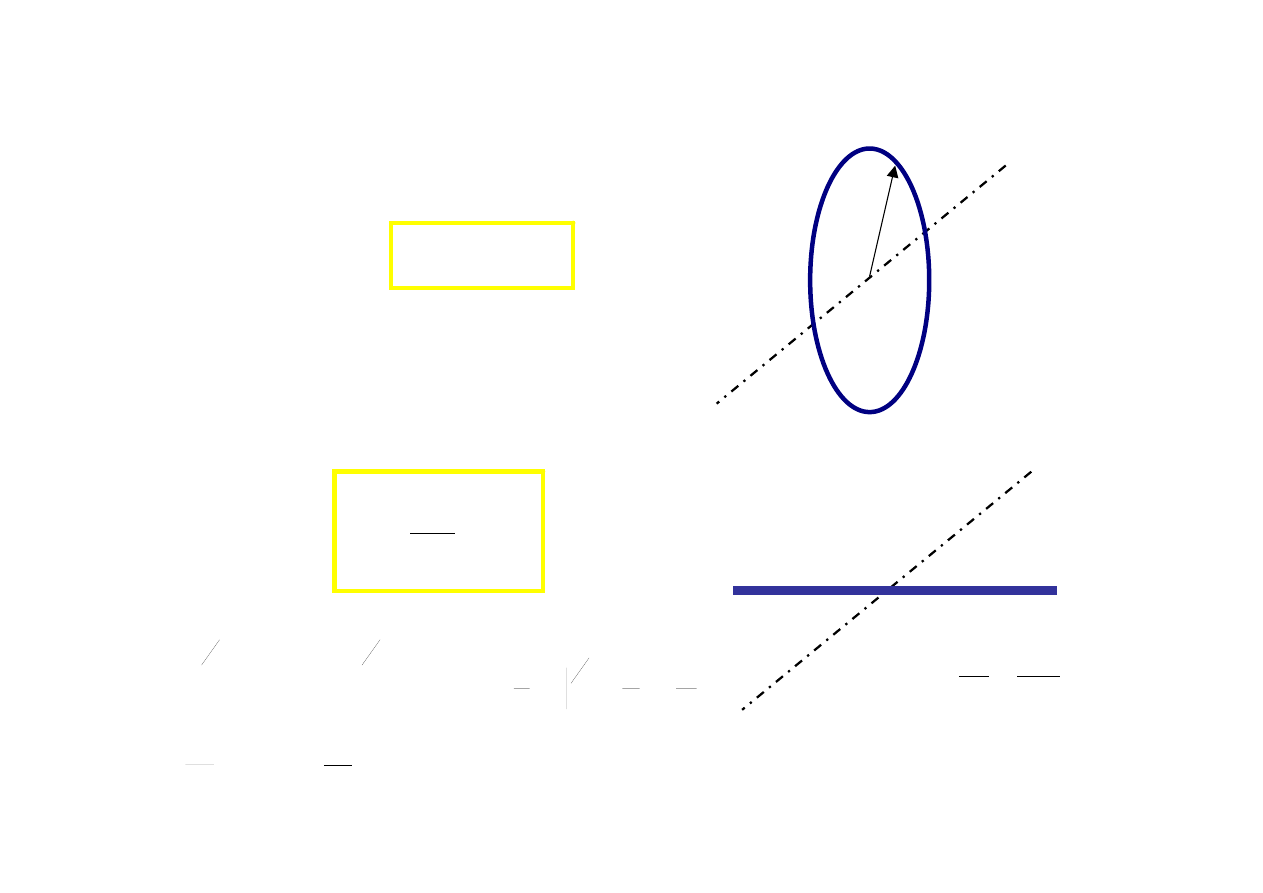
Ruch w polu siły centralnej.
- moment siły centralnej znika
* grawitacyjna,
* sprężysta,
* Coulomba, etc.)
x
y
r
p=mv
F
const
L
T
L
F
r
T
=
=
=
=
×
≡
0
0
c
c
dt
d
moment pędu całką ruchu
Ruch w polu siły centralnej.
- Drugie prawo Keplera.
Promień wodzący planety zakreśla równe pola w
równych czasach.
const
L
=
x
y
p=mv
r
vdt
α
m
rv
dt
dS
L
v
r
2
1
2
1
sin
2
1
=
×
=
=
α
m
L
m
mr
r
dt
d
r
r
dt
dS
2
1
2
1
2
1
2
1
2
2
=
=
=
⎟
⎠
⎞
⎜
⎝
⎛
=
ω
ω
θ
α
sin
2
1
vdt
r
dS
=
Ruch w polu siły centralnej 1/r
2
.
- Zasady zachowania.
( )
( )
const
r
E
v
E
p
kin
=
+
= const
L
x
y
r
v(r)
ω
κ
ω
κ
2
2
2
2
2
2
2
2
2
2
mr
L
r
r
m
mv
r
mv
mv
E
r
l
r
=
−
+
=
−
+
=
Szukamy równania toru w postaci
r(
θ
)
v
r
v
l
θ
2
2
2
2
mr
L
dt
d
r
m
L
E
m
dt
dr
v
r
=
≡
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
+
−
=
≡
θ
ω
κ
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
+
−
=
r
m
L
E
m
L
mr
d
dr
κ
θ
2
2
2
2
( )
2
2
2
2
1
cos
1
κ
ε
κ
θ
ε
θ
m
EL
m
L
p
p
r
+
≡
≡
+
=
r
E
p
κ
−
=
równanie krzywych stożkowych we współrzędnych biegunowych
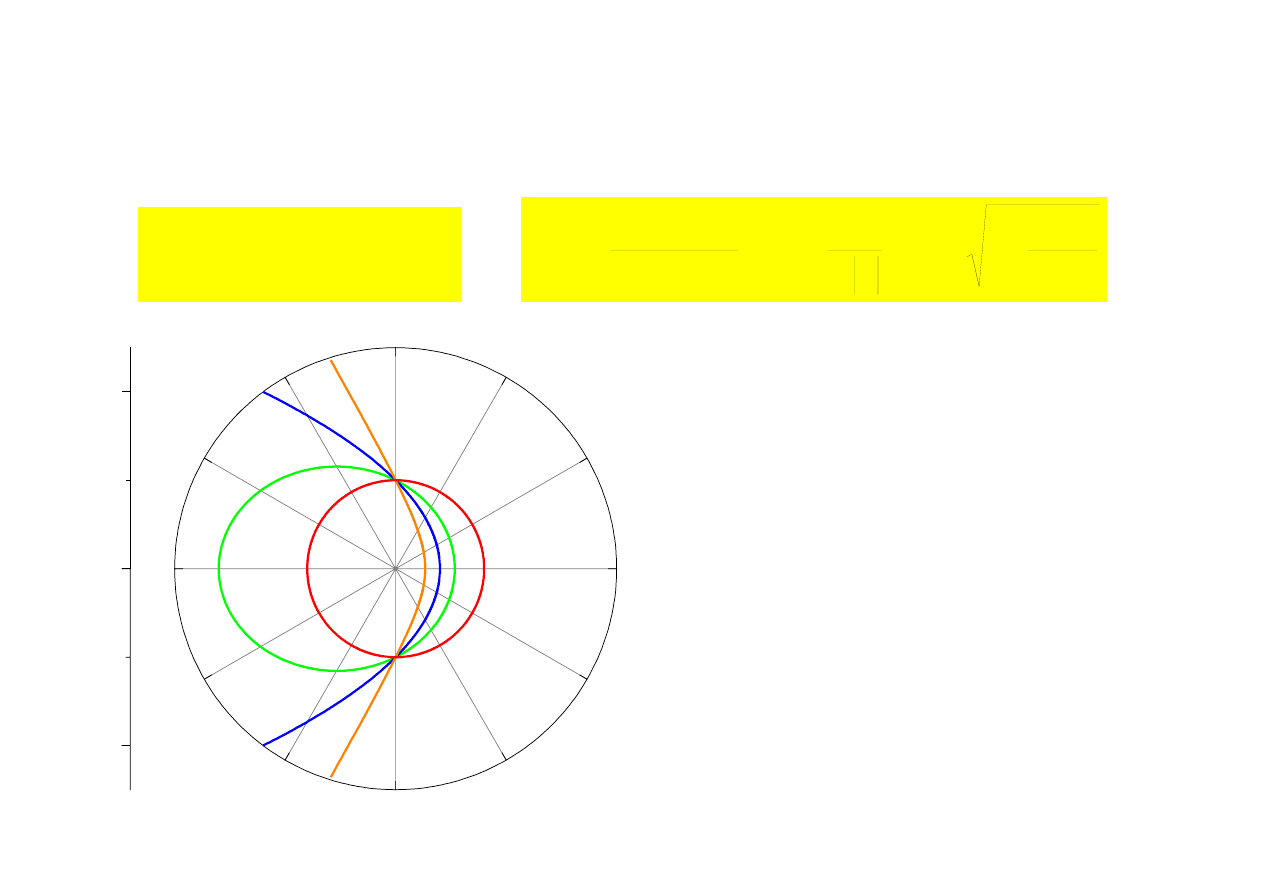
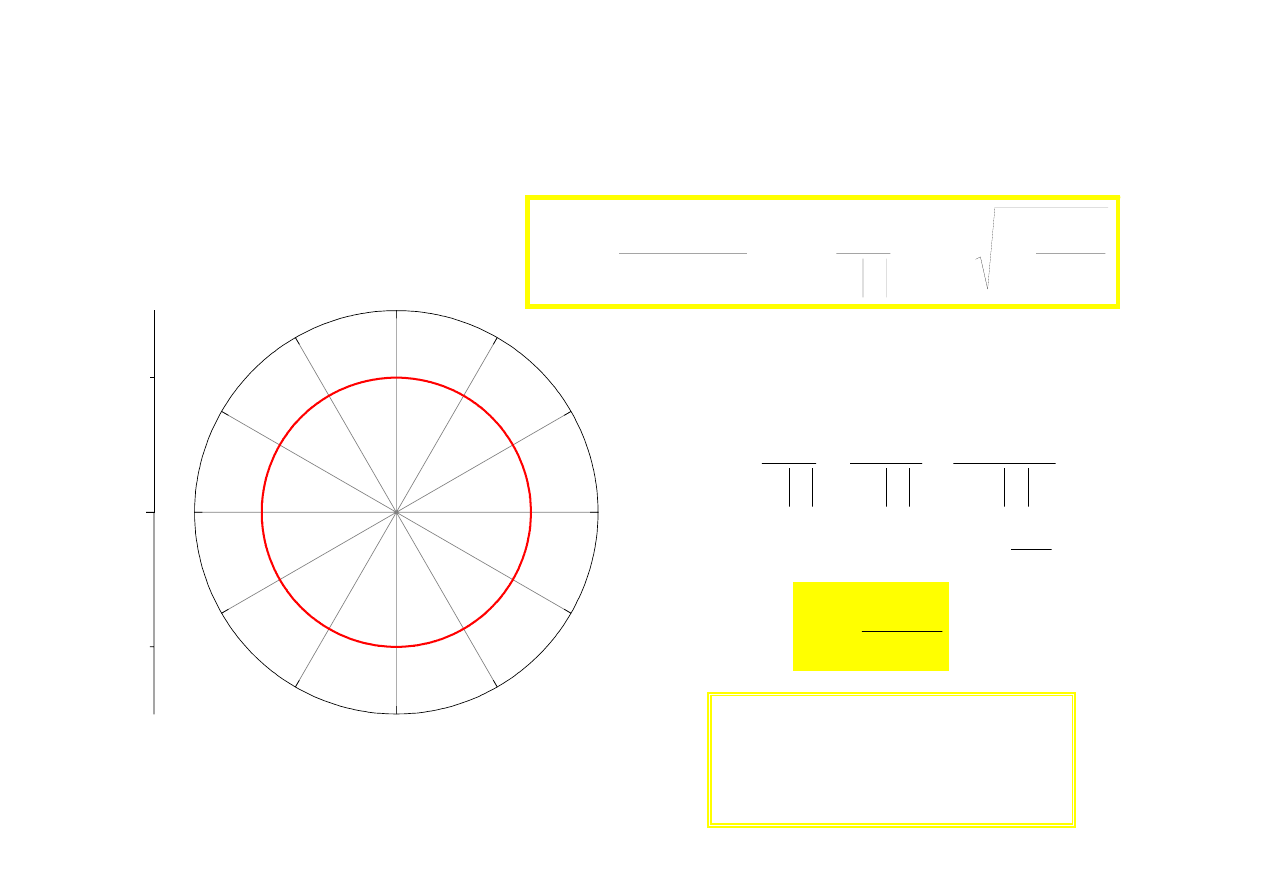
Ruch w polu siły centralnej 1/r
2
.
- krzywe stożkowe (koło, elipsa, parabola, hiperbola).
=
Pierwsze prawo Keplera
( )
( )
const
r
E
v
E
p
kin
=
+
= const
L
( )
2
2
2
2
1
cos
1
κ
ε
κ
θ
ε
θ
m
EL
m
L
p
p
r
+
≡
≡
+
=
p
-parametr (promień,
f(L
2
)
)
ε–mimośród:
ε =0 koło,
E
mała
<0
0<
ε<1
elipsa,
E <0
ε
=1
parabola,
E =0
ε
>1
hiperbola,
E >0
0
2
0
30
60
90
120
150
180
210
240
270
300
330
0
2
ε
=1
ε
=1
ε
=0
ε
=0.5
Ruch w polu siły centralnej 1/r
2
.
- Trzecie prawo Keplera (I).
( )
2
2
2
2
1
cos
1
κ
ε
κ
θ
ε
θ
m
EL
m
L
p
p
r
+
≡
≡
+
=
p
-parametr (promień,
f(L
2
)
)
gdy p stały (koło) to:
( )
T
GMm
m
r
m
m
I
m
L
p
r
π
ω
κ
κ
ω
κ
ω
κ
2
2
4
2
2
2
=
=
=
=
=
=
GM
r
T
3
2
2
4
π
=
Okres obiegu planety,
T
• nie zależy od masy planety
• jest proporcjonalny do
r
3/2
0
0
30
60
90
120
150
180
210
240
270
300
330
0
ε
=0
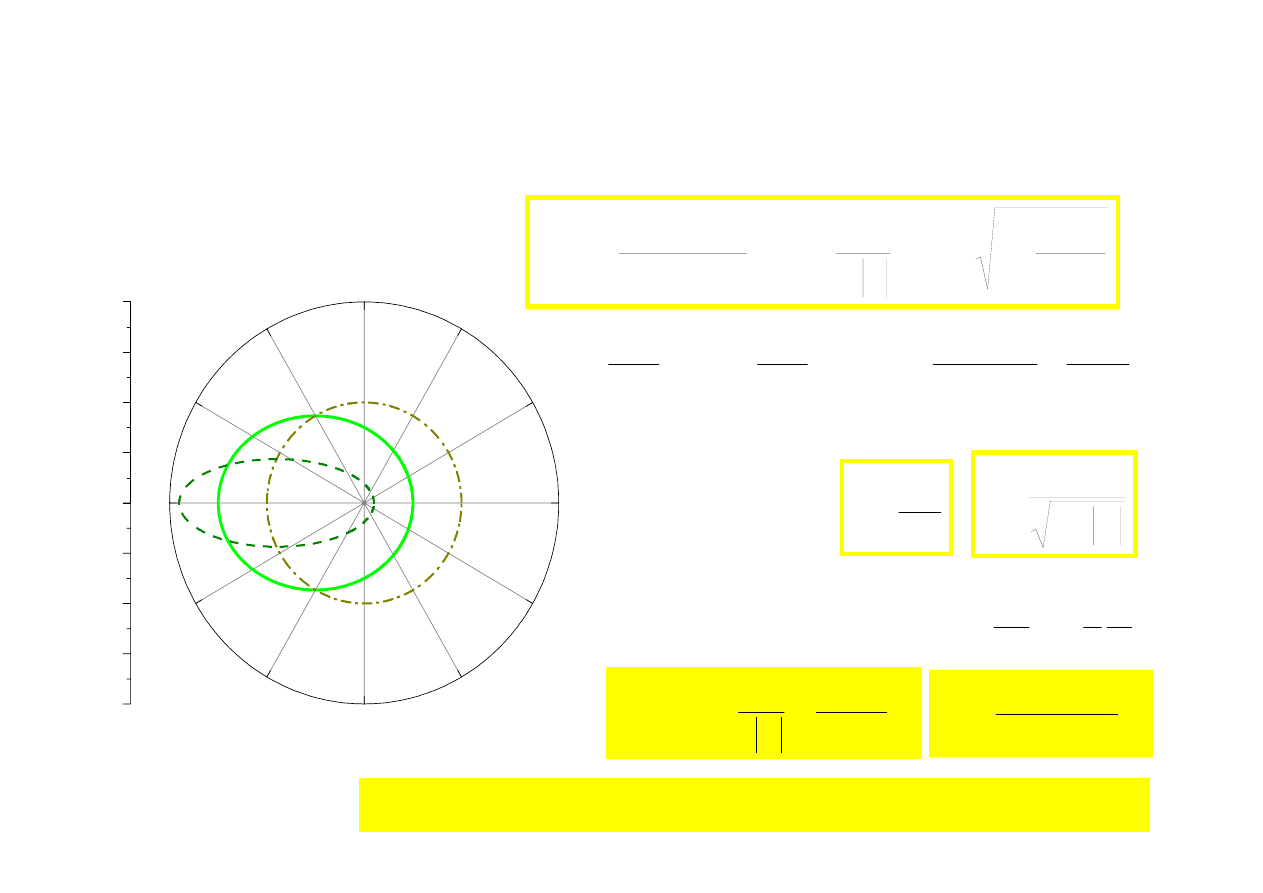
Ruch w polu siły centralnej 1/r
2
.
- Trzecie prawo Keplera (II).
( )
2
2
2
2
1
cos
1
κ
ε
κ
θ
ε
θ
m
EL
m
L
p
p
r
+
≡
≡
+
=
duża oś elipsy,
a
, zależy jedynie od
energii całkowitej
2
max
min
max
min
1
2
2
1
1
ε
ε
ε
−
=
+
=
−
=
+
=
p
r
r
a
p
r
p
r
E
a
2
2
κ
=
0.0
0.5
1.0
1.5
2.0
0
30
60
90
120
150
180
210
240
270
300
330
0.0
0.5
1.0
1.5
2.0
ε
=0
ε
=0.9
<
---- r
ma
x
ε
=0.5
<
------------ r
mi
n
E=const
pole elipsy:
E
m
L
b
2
=
m
L
T
dt
dS
T
ab
S
2
1
=
=
=
π
3
2
2
2
2
4
2
a
m
E
m
T
κ
π
κ
π
=
=
(III) Gdy
m<<M
okres obiegu,
T
, proporcjonalny do
a
3/2
.
(
)
3
2
2
4
a
m
M
G
T
+
=
π
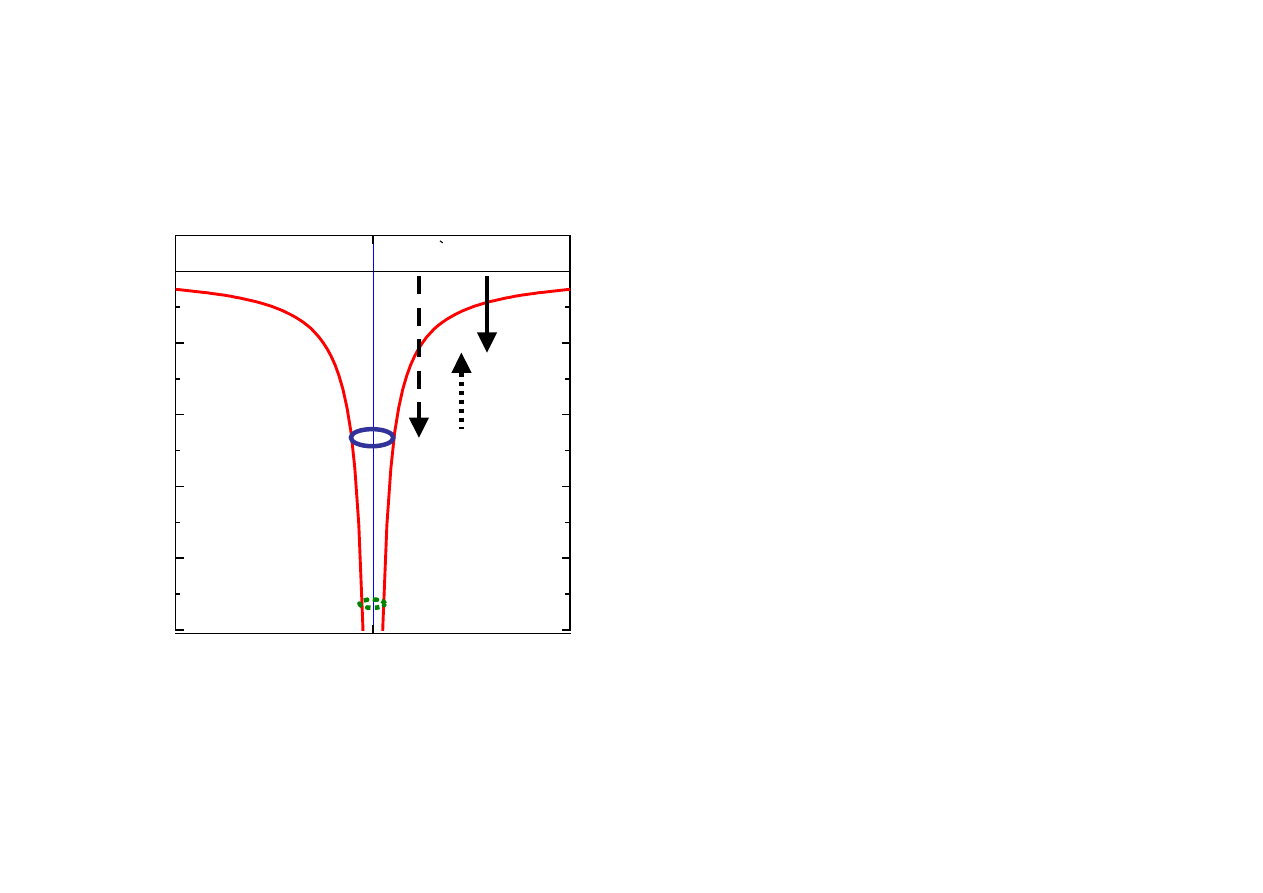
Ruch w polu siły centralnej 1/r
2
.
- układ nie posiada stanu równowagi statycznej
Twierdzenie o wiriale:
E
E
E
E
to
E
E
E
gdzie
E
E
E
kin
p
kin
p
kin
p
=
=
>
<
<
+
=
2
0
,
0
,
0
0
-5
-4
-3
-2
-1
0
Energia potencjalna
Promień
E
p
(r)=-1/r
E
p
E
E
kin
Układ bezstratny pozostaje
w równowadze dynamicznej!!!
(elektron w atomie)

Dynamika bryły sztywnej
• druga zasada dynamiki dla bryły,
• moment skręcający sił wewnętrznych znika,
• zasada zachowania momentu pędu
• moment bezwładności
• energia kinetyczna
Zasada zachowania momentu pędu.
dla układu
x
y
z
r
1
T
1
F
12
Moment obrotowy sił wewnętrznych znika
(względem dowolnego punktu odniesienia)
T
L
=
dt
d
r
2
F
21
T
2
∑
∑
=
i
i
i
i
dt
d
T
L
(
)
(
) (
)
∑
∑
∑
×
+
×
=
×
=
i
wewn
i
i
i
zewn
i
i
i
i
i
tot
F
r
F
r
F
r
T
(
)
0
=
×
=
∑
i
wewn
i
i
wewn
tot
F
r
T
zewn
tot
tot
dt
d
T
L
=
const
L
T
=
⇒
=
tot
zewn
tot
0
Zasada zachowania momentu pędu.
const
L
T
=
⇒
=
tot
zewn
tot
0
zewn
tot
tot
dt
d
T
L
=
• II prawo Keplera
• żyroskop,
• piruety,
• mechanika kawantowa (fizyka atomu, chemia)
Druga zasada dynamiki dla ruchu obrotowego.
zewn
tot
tot
dt
d
F
p
=
zewn
tot
tot
dt
d
T
L
=
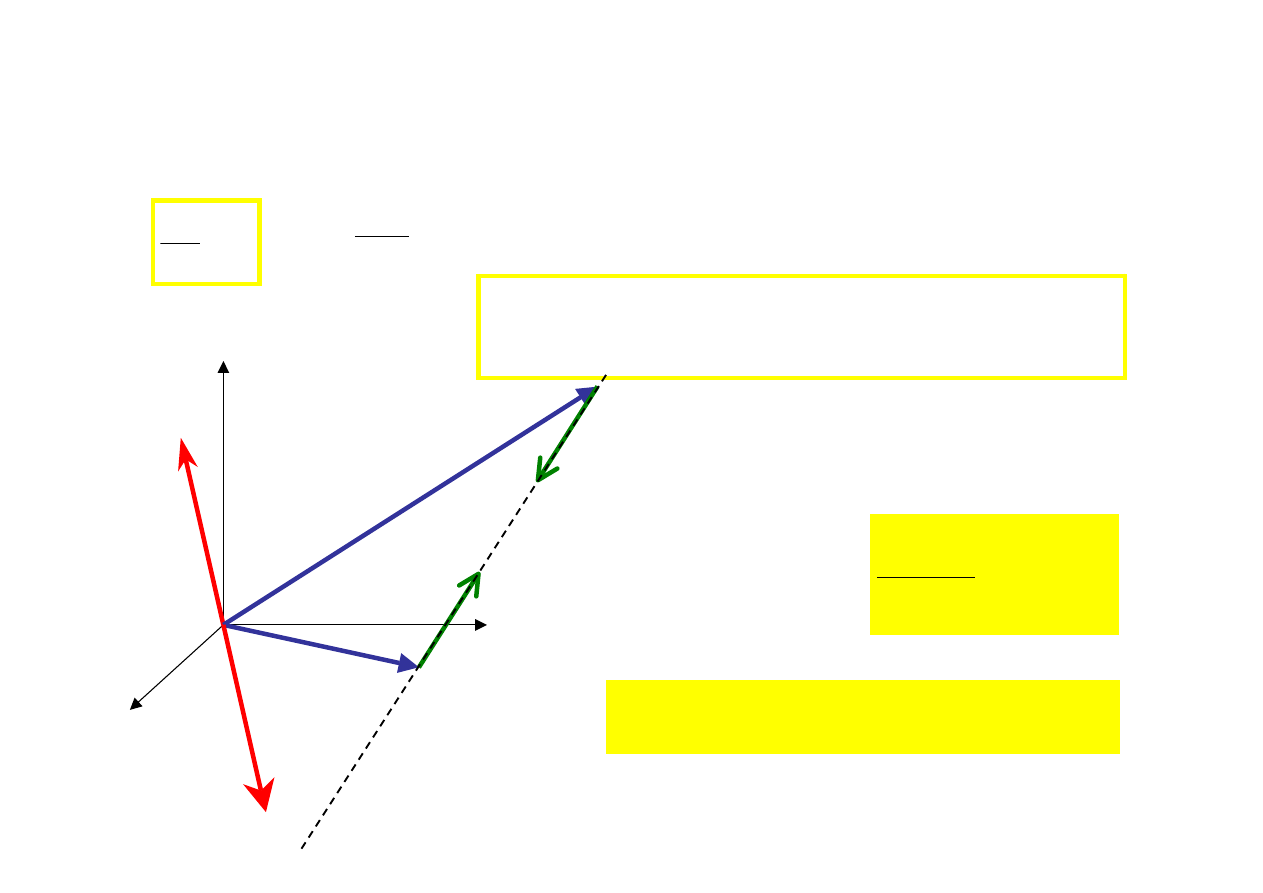
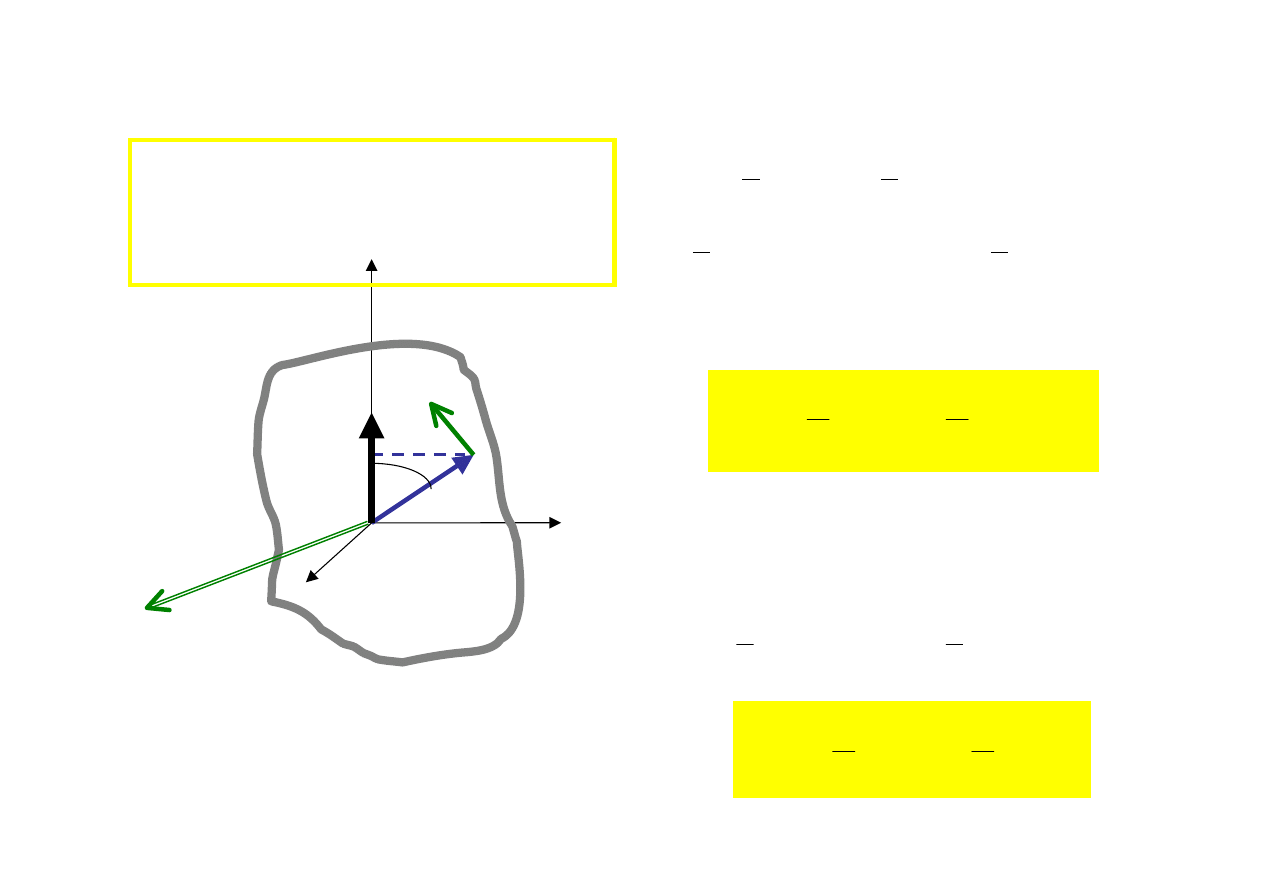
Bryła sztywna:
•odległość pomiędzy punktami stała,
• wspólna prędkość kątowa
Gdy moment pędu,
L
, równoległy do
ω,
(gdy obrót wokół osi symetrii bryły
składowe poprzeczne
L
x
, L
y
=0
)
x
r
v=
ω×r
z
y
ω
(
)
(
)
(
)
(
)
ρ
=r sin(r,
ω)
L=mr
×v
(
)
∑
∑
∑
∑
=
⋅
=
×
=
×
×
=
×
=
×
=
i
i
i
i
tot
i
i
i
i
i
i
i
i
i
i
i
tot
r
m
L
m
m
ω
r
ω
L
r
ω
v
r
ω
r
v
r
p
r
L
,
sin
2
2
ω
ω
ω
∑
=
=
i
i
i
m
I
ω
I
L
2
ρ
ω
ω
ω
L
ω
Moment bezwładności
I
względem osi
ω
Druga zasada dynamiki dla ruchu obrotowego.
x
z
y
r
F
zewn
tot
tot
dt
d
T
L
=
ω
T
dL/dt
L
• jazda na rowerze,
• precesja (dziecinny bączek)
• rezonans magnetyczny
dL/dt
L
F=mg
r
T
Moment bezwładności brył
R
2
MR
I
=
• Obręcz
• Pręt
2
12
1
ML
I
=
dL
dM
L
M
=
≡
λ
( )
2
2
3
2
0
3
2
0
2
2
0
2
12
1
12
1
2
3
2
3
1
2
2
2
ML
L
L
I
L
d
dM
I
L
L
L
=
=
⎟
⎠
⎞
⎜
⎝
⎛
=
=
=
=
∫
∫
λ
λ
ρ
λ
ρ
ρ
λ
ρ
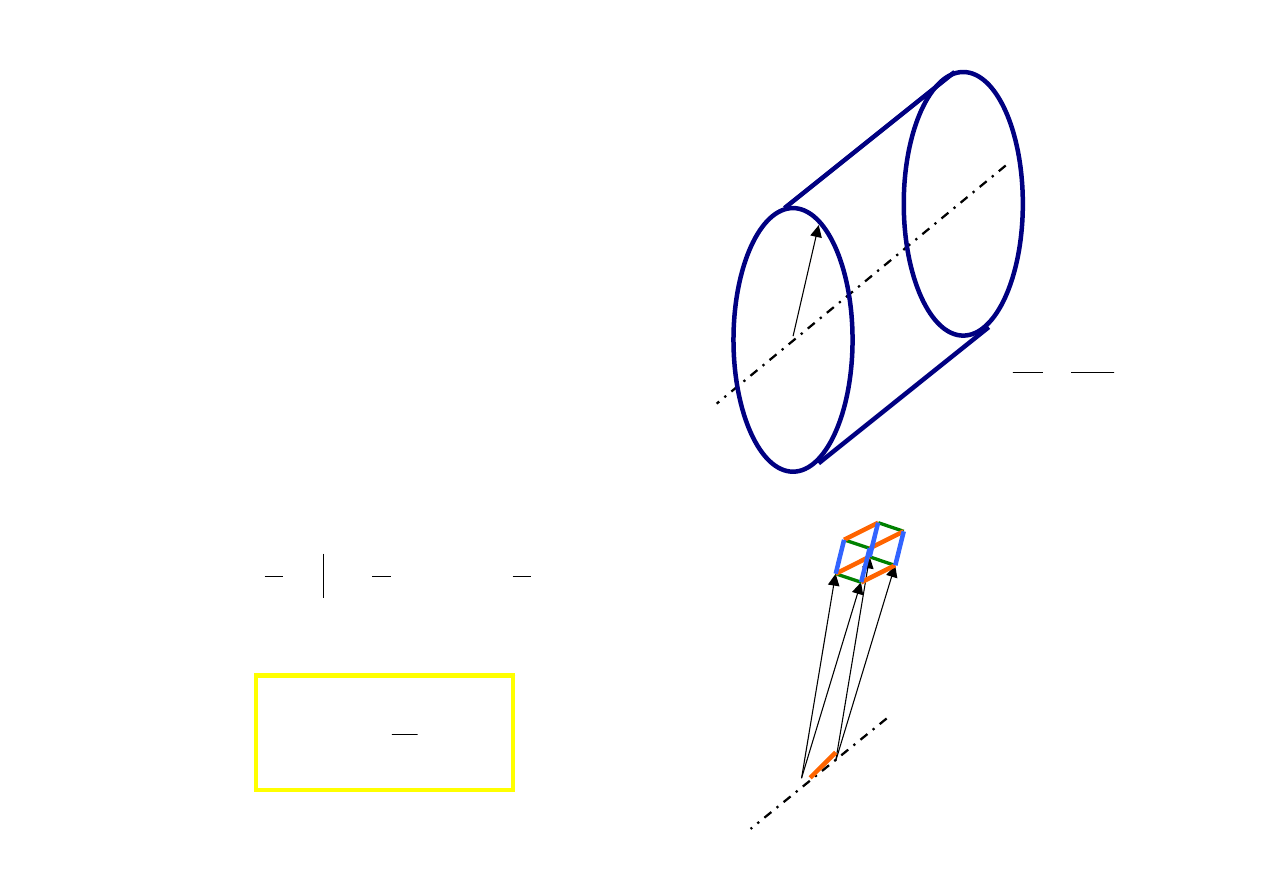
Moment bezwładności brył
R
2
2
DLR
DV
M
L
R
V
dV
dM
V
M
D
π
π
=
=
=
=
≡
• Jednorodny walec
∫
∫
=
=
V
dV
D
dm
I
2
2
ρ
ρ
2
4
0
4
0
3
2
0
0
3
0
2
0
0
2
2
1
2
1
4
1
2
2
MR
DLR
DL
d
DL
d
d
DL
dl
d
d
D
I
R
R
R
L
R
=
=
=
=
=
=
=
=
∫
∫
∫
∫
∫
∫
π
ρ
π
ρ
ρ
π
ϕ
ρ
ρ
ϕ
ρ
ρ
ρ
π
π
2
R
dl
d
d
dV
⋅
⋅
=
ρ
ϕ
ρ
dl
ρ
d
ϕ
d
ρ
dl
ρ
2
2
1
MR
I
walca
=
Moment bezwładności brył
2
MR
I
=
• Obręcz wzgl. osi
• Krążek, walec, wzgl. osi
2
2
1
MR
I
=
• Krążek, walec, wzgl. osi w płaszczyźnie
2
4
1
MR
I
=
• Pręt wzgl. osi poprzecznej
2
12
1
ML
I
=
• Kula pusta
2
3
2
MR
I
=
Energia kinetyczna w ruchu obrotowym.
x
S
z
S
y
S
r
S
v
i
=
ω×r
i
ω
(
)
∑
∑
∑
∑
∑
+
+
=
+
=
=
i
i
i
i
i
i
S
i
i
S
i
i
S
i
i
i
i
kin
S
S
S
v
m
m
m
V
m
v
m
E
2
2
2
2
2
1
2
1
2
1
2
1
v
V
v
V
ρ
=
=r
sin(r,
ω)
Gdy liczymy względem układu
związanego z środkiem masy to:
∑
∑
=
=
i
i
i
i
i
i
S
S
m
m
0
0
v
r
∑
+
=
i
i
i
S
kin
S
v
m
MV
E
2
2
2
1
2
1
Energia środka masy + energia względem środka masy
(
)
∑
∑
=
×
=
×
=
i
i
i
i
i
i
kin
i
S
S
S
m
m
E
2
2
2
2
1
2
1
ρ
ω
r
ω
r
ω
v
i
V
2
2
2
1
2
1
ω
ω
S
I
MV
E
S
kin
+
=

Praca sił wewnętrznych w ruchu obrotowym
• praca sił grawitacji w zagadnieniu Keplera
.
const
I
L
=
=
ω
Zasada zachowania momentu pędu:
Zasada zachowania energi: praca
wykonana nad układem powoduje
wzrost energii (kinetycznej)
2
2
1
2
1
1
2
1
2
1
2
1
ω
ω
I
I
d
W
r
r
−
=
⋅
=
∫
r
F
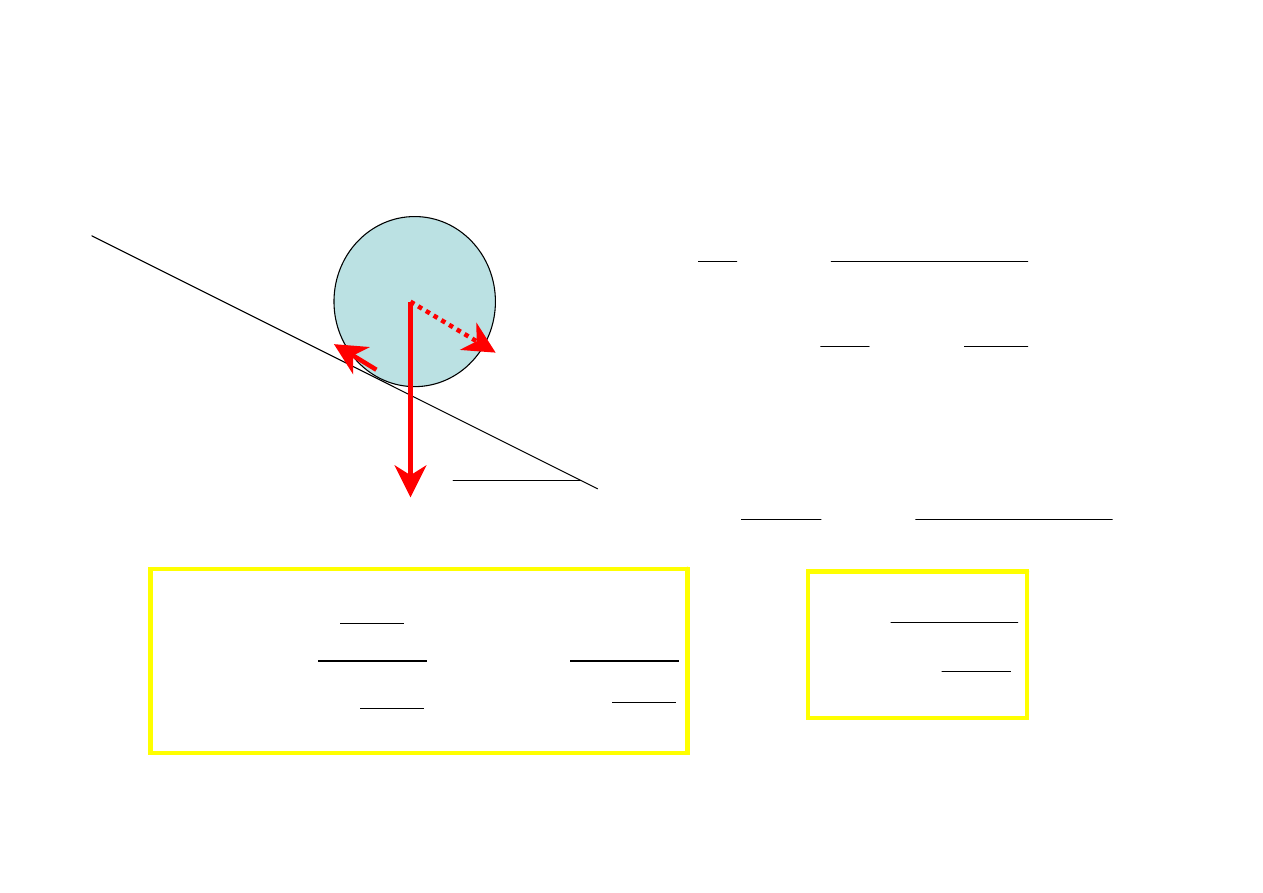
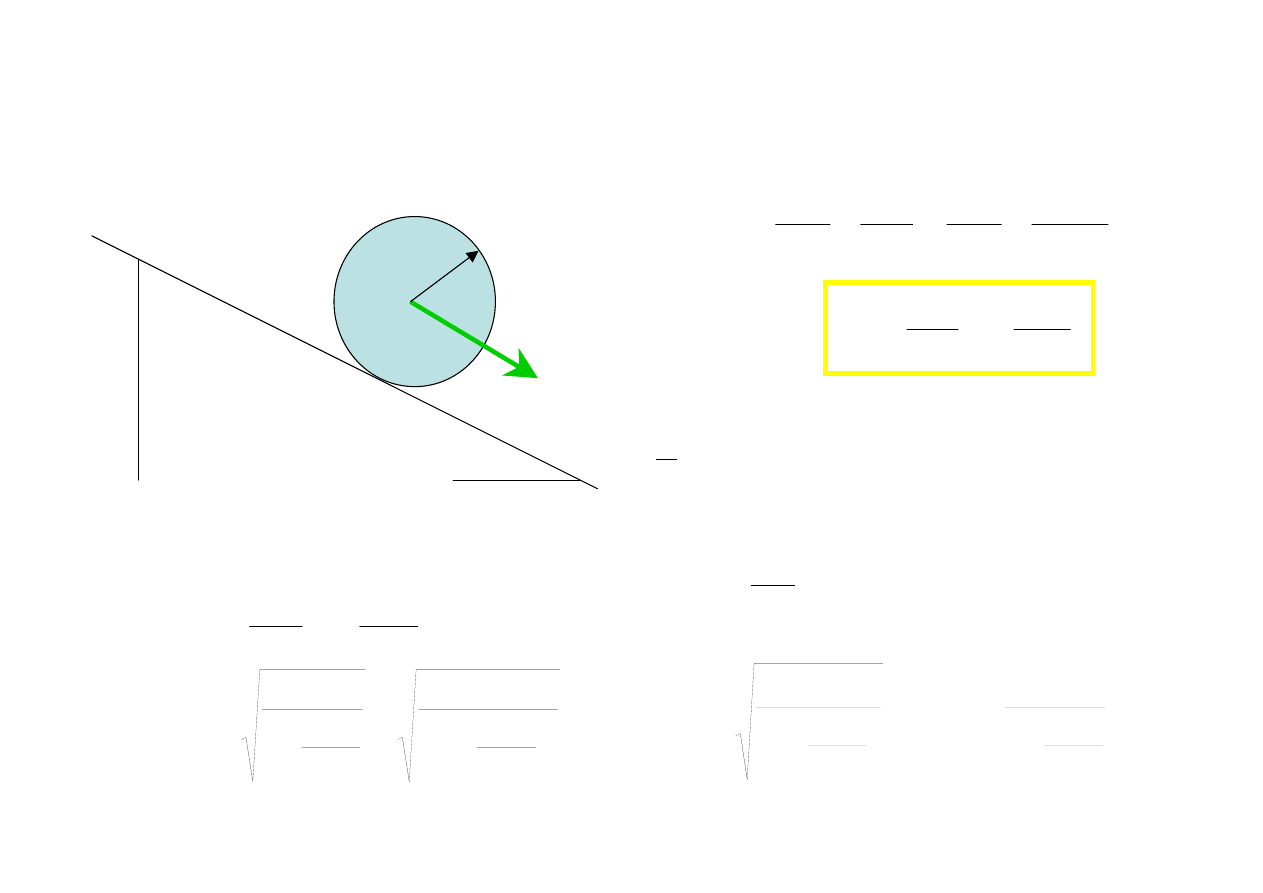
Staczanie się bryły
R
a
I
R
F
dt
d
m
F
mg
a
dt
dv
T
T
γ
γ
ω
α
=
⎪
⎭
⎪
⎬
⎫
=
=
−
=
=
sin
P=mg
F
T
=?
α
mgsin
α
m
F
mg
a
I
R
F
T
T
−
=
=
α
sin
2
I
mR
mg
F
T
2
1
sin
+
=
α
2
2
2
1
sin
sin
1
1
mR
I
a g
g
I
mR
mR
I
α
α
⎛
⎞
⎜
⎟
=
⎜
⎟ =
⎜
⎟
+
+
⎜
⎟
⎝
⎠
Energia kinetyczna toczącej się bryły.
α
v
R
v
=
ω
R
2
2
2
2
2
2
2
2
2
mR
mv
I
mv
I
mv
E
kin
+
=
+
=
ω
⎟
⎠
⎞
⎜
⎝
⎛ +
=
2
2
1
2
mR
I
mv
E
kin
h
l
z zasady zachowania energii
( )
( )
at
t
v
at
t
l
=
=
2
2
( )
( )
( )
2
2
2
2
1
sin
2
1
2
0
1
2
mR
I
t
gl
mR
I
t
gh
t
v
const
mR
I
mv
mgh
+
=
+
=
=
=
⎟
⎠
⎞
⎜
⎝
⎛ +
+
α
2
2
2
1
sin
1
sin
mR
I
g
a
mR
I
gat
at
+
=
+
=
α
α
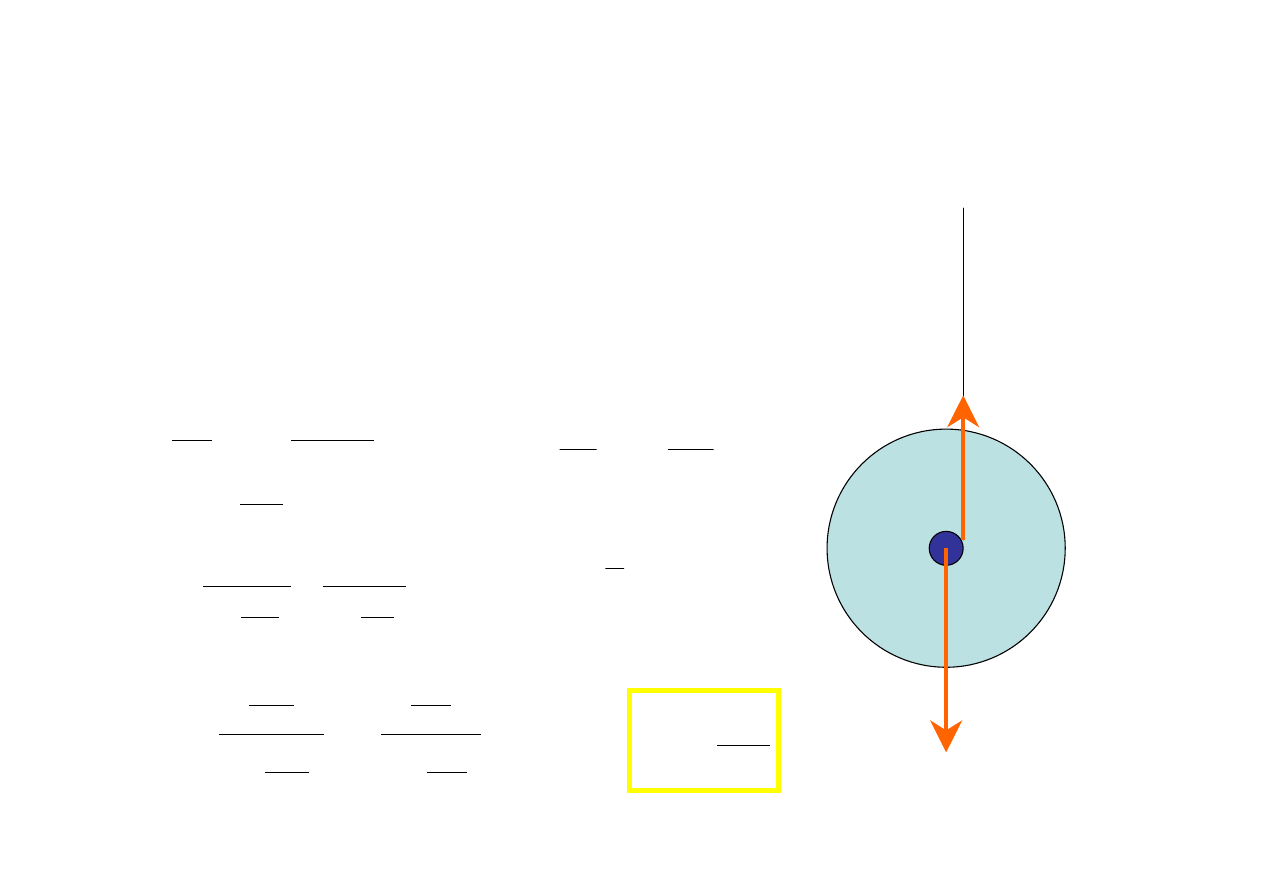
Energia kinetyczna ruchu obrotowego
• staczanie a zsuwanie się,
• zabawa w „napędzany” samochodzik,
• dlaczego stosuje się aluminiowe felgi,
• pocisk z gwintowanej lufy,
• jo-jo, opada powoli i wraca.
T
N
⎪
⎪
⎩
⎪⎪
⎨
⎧
=
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
+
−
=
=
mg
I
mr
T
m
T
mg
a
r
I
rT
N
N
N
2
1
r
a
I
r
F
dt
d
N
γ
γ
ω
=
=
=
r
2
2
1
mR
I
=
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
+
→
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
+
=
2
2
2
2
1
1
R
r
mg
I
mr
mg
T
N
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
+
→
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
+
=
2
2
2
2
2
2
2
1
2
1
R
r
R
r
g
I
mr
I
mr
g
a
2
2
2
R
r
g
a
≅
mg
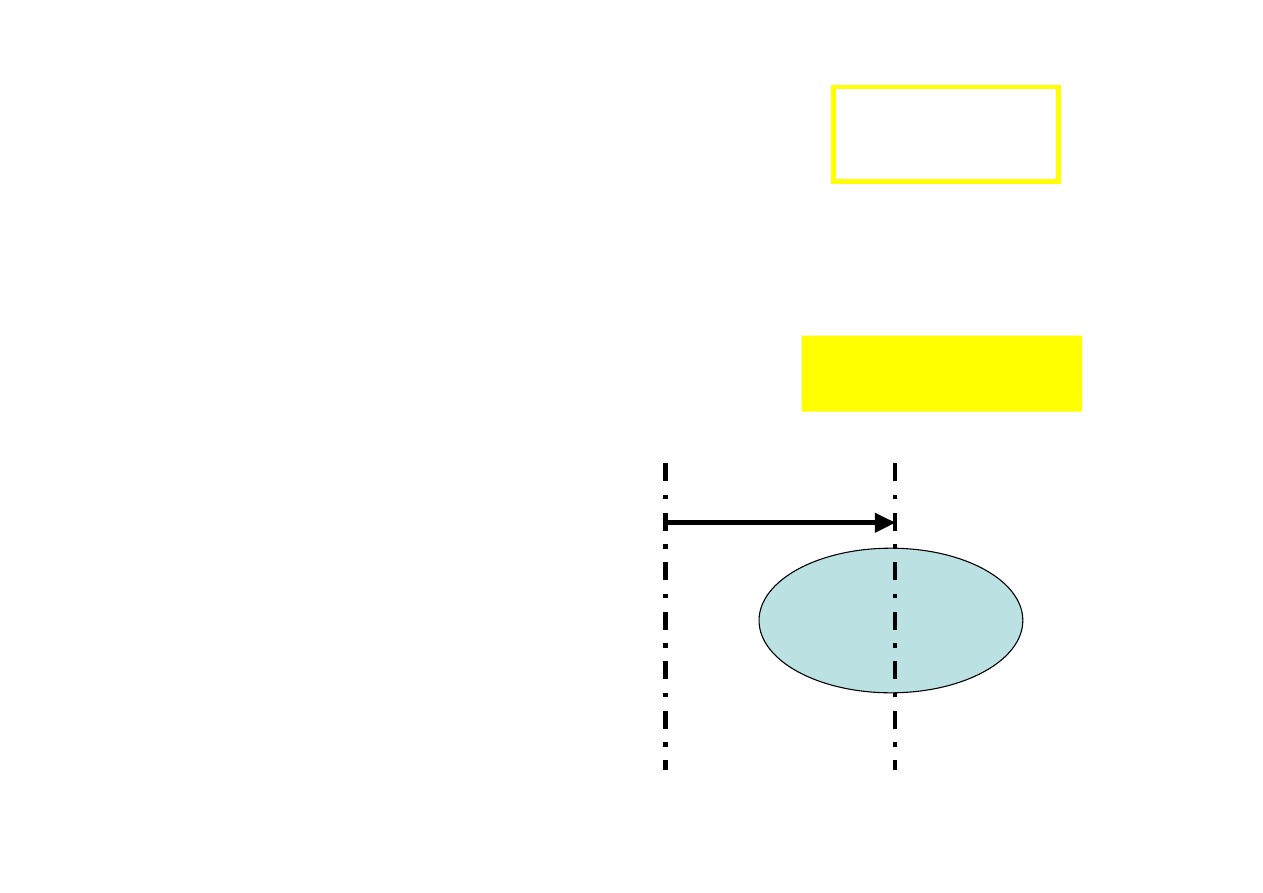
Moment bezwładności brył.
∑
=
i
i
i
m
I
2
ρ
ω
• cienki pierścień, oś symetrii
I=mR
2
• cienki pierścień, oś poprzeczna
I=mR
2
/2
• dysk, oś symetrii
I=mR
2
/2
•
dysk oś poprzeczna I=mR
2
/4
• pręt, oś poprzeczna
I=ml
2
/12
• walec, oś podłużna
I=mr
2
/2
• kula pełna
I=2mR
2
/5
• kula pusta
I=2mR
2
/3
0
2
ω
ω
I
MR
I
+
=
0
ω
ω
R
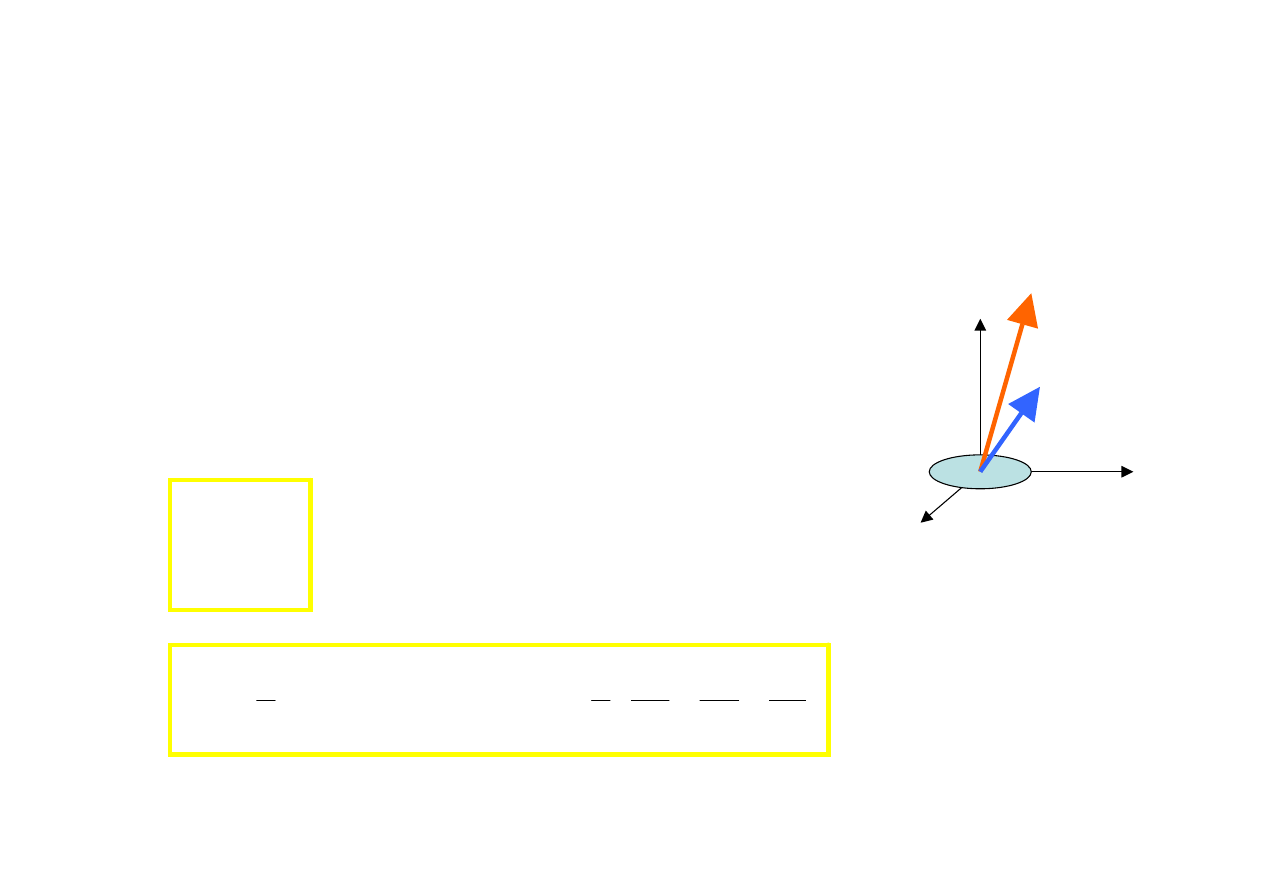
Tensor momentu bezwładności
• tensor związek pomiędzy
wektorami
• tensor diagonalny
ω
L I~
=
[
]
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
=
z
y
x
zz
zy
zx
yz
yy
yx
xz
xy
xx
z
y
x
I
I
I
I
I
I
I
I
I
L
L
L
ω
ω
ω
,
,
∑
=
β
β
αβ
α
ω
I
L
[
]
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
=
z
y
x
zz
yy
xx
z
y
x
I
I
I
L
L
L
ω
ω
ω
0
0
0
0
0
0
,
,
z
L
ω
z
z
z
y
y
y
x
xx
x
I
L
I
L
I
L
ω
ω
ω
=
=
=
y
x
(
)
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
+
+
=
+
+
=
zz
z
yy
y
xx
x
z
zz
y
yy
x
xx
kin
I
L
I
L
I
L
I
I
I
E
2
2
2
2
2
2
2
1
2
1
ω
ω
ω
obrót wokół osi o dużym momencie bezwładności odpowiada małej energii kinetycznej
Document Outline
- (6) Moment pędu
- Moment pędu punktu materialnego względem środka układu odniesienia.
- Moment pędu cząstki swobodnej.- parametr zderzenia: r0=r sina
- zmiana momentu pędu punktu materialnego pod działaniem siły, F.
- Moment bezwładności.
- Ruch w polu siły centralnej.- moment siły centralnej znika * grawitacyjna, * sprężysta, * Coulomba, etc.)
- Ruch w polu siły centralnej.- Drugie prawo Keplera.
- Ruch w polu siły centralnej 1/r2.- Zasady zachowania.
- Ruch w polu siły centralnej 1/r2.- krzywe stożkowe (koło, elipsa, parabola, hiperbola). = Pierwsze prawo Keplera
- Ruch w polu siły centralnej 1/r2.- Trzecie prawo Keplera (I).
- Ruch w polu siły centralnej 1/r2.- Trzecie prawo Keplera (II).
- Ruch w polu siły centralnej 1/r2.- układ nie posiada stanu równowagi statycznej
- Dynamika bryły sztywnej
- Zasada zachowania momentu pędu.
- Zasada zachowania momentu pędu.
- Druga zasada dynamiki dla ruchu obrotowego.
- Druga zasada dynamiki dla ruchu obrotowego.
- Moment bezwładności brył
- Moment bezwładności brył
- Moment bezwładności brył
- Energia kinetyczna w ruchu obrotowym.
- Praca sił wewnętrznych w ruchu obrotowym
- Staczanie się bryły
- Energia kinetyczna toczącej się bryły.
- Energia kinetyczna ruchu obrotowego
- Moment bezwładności brył.
- Tensor momentu bezwładności
Wyszukiwarka
Podobne podstrony:
16 Zasada zachowania momentu pędu
20 moment pędu
Zasady zachowania energii, pędu i momentu pędu, zadania
1 3 1 4 Zadasa zachowania pedu i momenty pedu
Zasada zachowania momentu pędu w Piłce Nożnej
11Zasada zachowania momentu pedu ukladu czastek
ZASADA ZACHOWANIA PĘDU I MOMENTU PĘDU i REAKCJA HYDRODYNAMICZNA
,fizyka 1, Moment pędu
Zasada zachowania momentu pędu
ii4 kwantowy moment pedu i kwantowy mm
zawieszenie silnka przenoszenie momentu obrotowego
407 B2GB0103P0 Momenty dokrecania Kola Nieznany
407 B2FB04K1 Identyfikacja Dane techniczne Momenty dokrecania Osie napedowe Nieznany
więcej podobnych podstron