1
GEODEZJA DROGOWA – DUL – sem. VIII 25.VI.2010r.
Opracowanie zagadnie
ń
z: http://www.satgis.utp.edu.pl/www/pl/dydaktyka/atr/bud_dz_dul.htm
01. Układy współrz
ę
dnych -
wielko
ś
ci k
ą
towe lub liniowe, wyznaczaj
ą
ce poło
ż
enie punktu na dowolnej
powierzchni lub w przestrzeni w sposób wzgl
ę
dny w stosunku do przyj
ę
tych za pocz
ą
tek układu płaszczyzn lub
linii. Wszystkie układy współrz
ę
dnych ró
ż
ni
ą
si
ę
od siebie charakterystyk
ą
geometryczn
ą
.
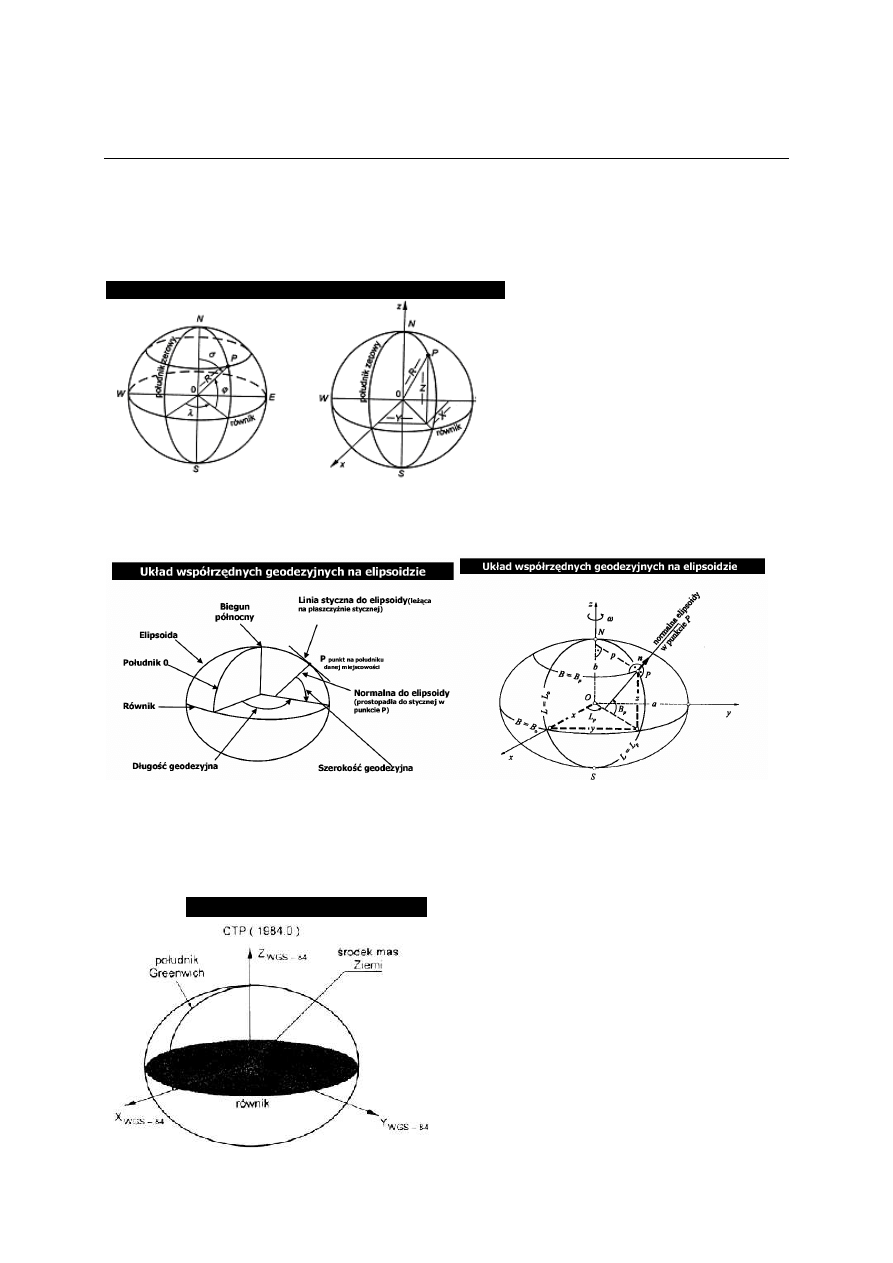
A. Układ współrz
ę
dnych na kuli (definicje, rysunek)
Układ współrz
ę
dnych geograficznych.
......
1. opisanie poło
ż
enia punktu: dwa k
ą
tów
okre
ś
laj
ą
cych geocentryczny kierunek
do danego punktu,
2. w ukł. tym okre
ś
lane s
ą
szeroko
ść
geograficzna i długo
ść
geograficzna,
3. wymaga niewielkiej dokładno
ś
ci
okre
ś
lenia poło
ż
enia, rz
ę
du dziesi
ą
tek
metrów.
4. pocz
ą
tek układu znajduje si
ę
w
ś
rodku
geometrycznym kuli.
5.
nie wyst
ę
puje współrz
ę
dna wysoko
ść
punktu, przez któr
ą
rozumiemy odst
ę
p
punktu od okre
ś
lonej powierzchni
odniesienia geoidy,
B. Układ współrz
ę
dnych na elipsoidzie (definicje, rysunek)
1. powierzchnia: elipsoida obrotowa
2. współrz
ę
dne okre
ś
lane s
ą
przy pomocy: szeroko
ś
ci geodezyjnej (elipsoidalna) B
oraz długo
ś
ci geodezyjnej (elipsoidalna) L.
3.
równie
ż
okre
ś
lana wysoko
ść
punktu nad powierzchni
ą
elipsoidy jest to tzw.
wysoko
ść
elipsoidalna.
W Polsce:
W
WGS-84
....4
1. układ globalny,
2. współrz
ę
dne mog
ą
by
ć
okre
ś
lone zarówno w układzie
kartezja
ń
skim, jak i elipsoidalnym.
3. pocz
ą
tek układu pokrywa si
ę
ze
ś
rodkiem masy Ziemi,
4. o
ś
Z jest skierowana do umownego bieguna
ziemskiego.
5. kierunek osi X jest wyznaczony przez przeci
ę
cie
płaszczyzny południka i płaszczyzny równika
zwi
ą
zanego z biegunem ziemskim,
6. o
ś
Y uzupełnia prawoskr
ę
tny ortogonalny układ
współrz
ę
dnych.
7. pocz
ą
tek układu WGS-84 jest jednocze
ś
nie
ś
rodkiem
geometrycznym elipsoidy WGS-84, a o
ś
Z jej osi
ą
obrotu.
8. cz
ę
sto spotykany jest w odbiornikach GPS.
2
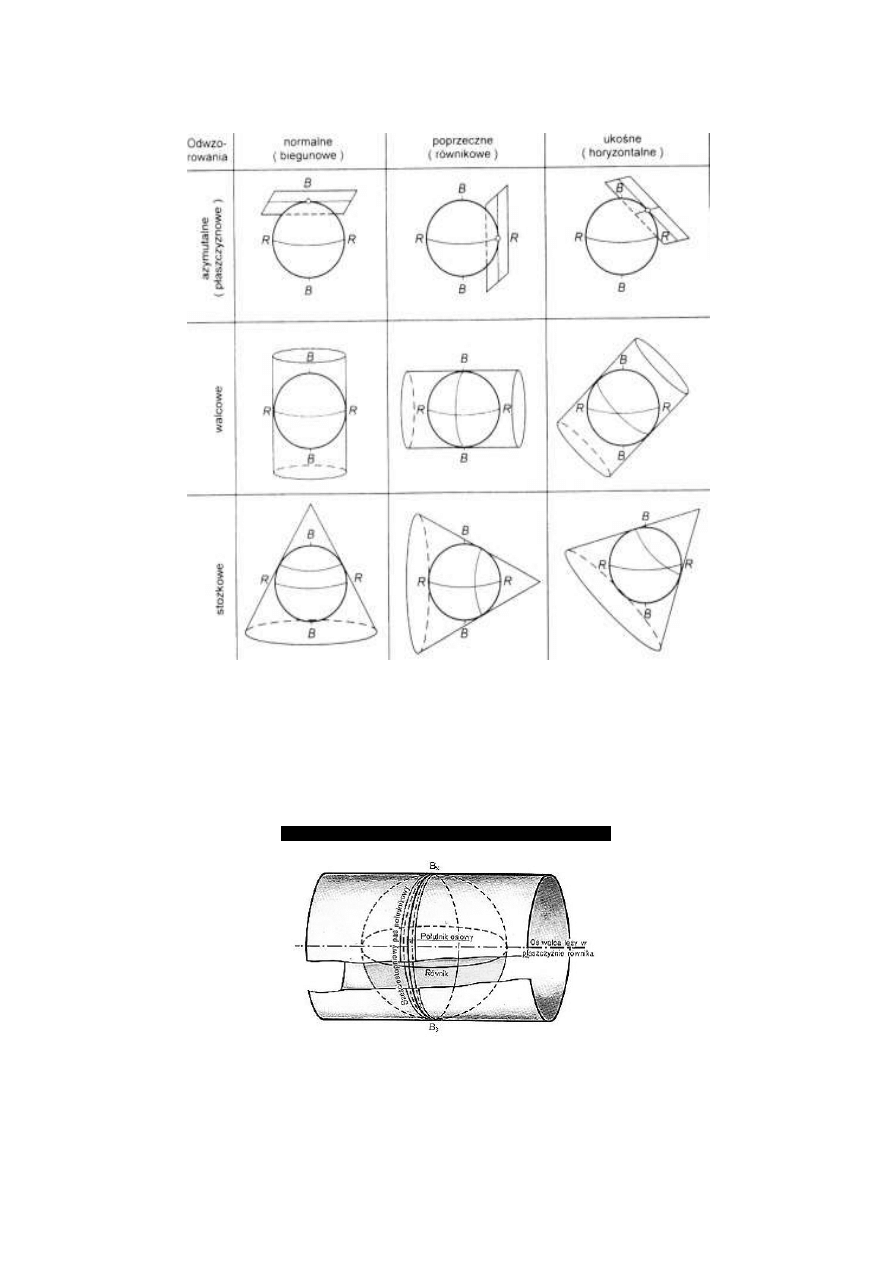
02. Rodzaje odwzorowa
ń
kartograficznych:
Odwzorowanie kartograficzne – przeniesienie punktów Ziemii na regularn
ą
powierzchni
ę
geometryczn
ą
, wg z
góry narzuconych warunków.
Reguły odwzorowania wyra
ż
amy za pomoc
ą
form matematycznych podaj
ą
cych zwi
ą
zek mi
ę
dzy współrz
ę
dnymi
geograficznymi (geodezyjnymi) punktów odniesienia (kula, elipsoida), a współrz
ę
dnymi płaskimi odpowiadaj
ą
cych
im punktów na płaszczy
ź
nie (na mapie).
W Polsce:
Odwzorowanie Gaussa-Krügera
a
Jest to wiernok
ą
tne walcowe poprzeczne odwzorowanie powierzchni elipsoidy obrotowej na płaszczyzn
ę
, przy
czym
ś
rodkowy południk strefy odtwarza si
ę
wiernie. Długo
ś
ci odcinków w odwzorowaniu Gaussa-Krügera s
ą
obarczone zniekształceniami. Zniekształcenia zale
żą
od skali odwzorowania, nie zale
żą
od orientacji odcinka.
Pas południkowy (strefa) jest rzutowany na walec, który styka si
ę
z powierzchni
ą
Ziemi (elipsoidy) wzdłu
ż
południka osiowego.
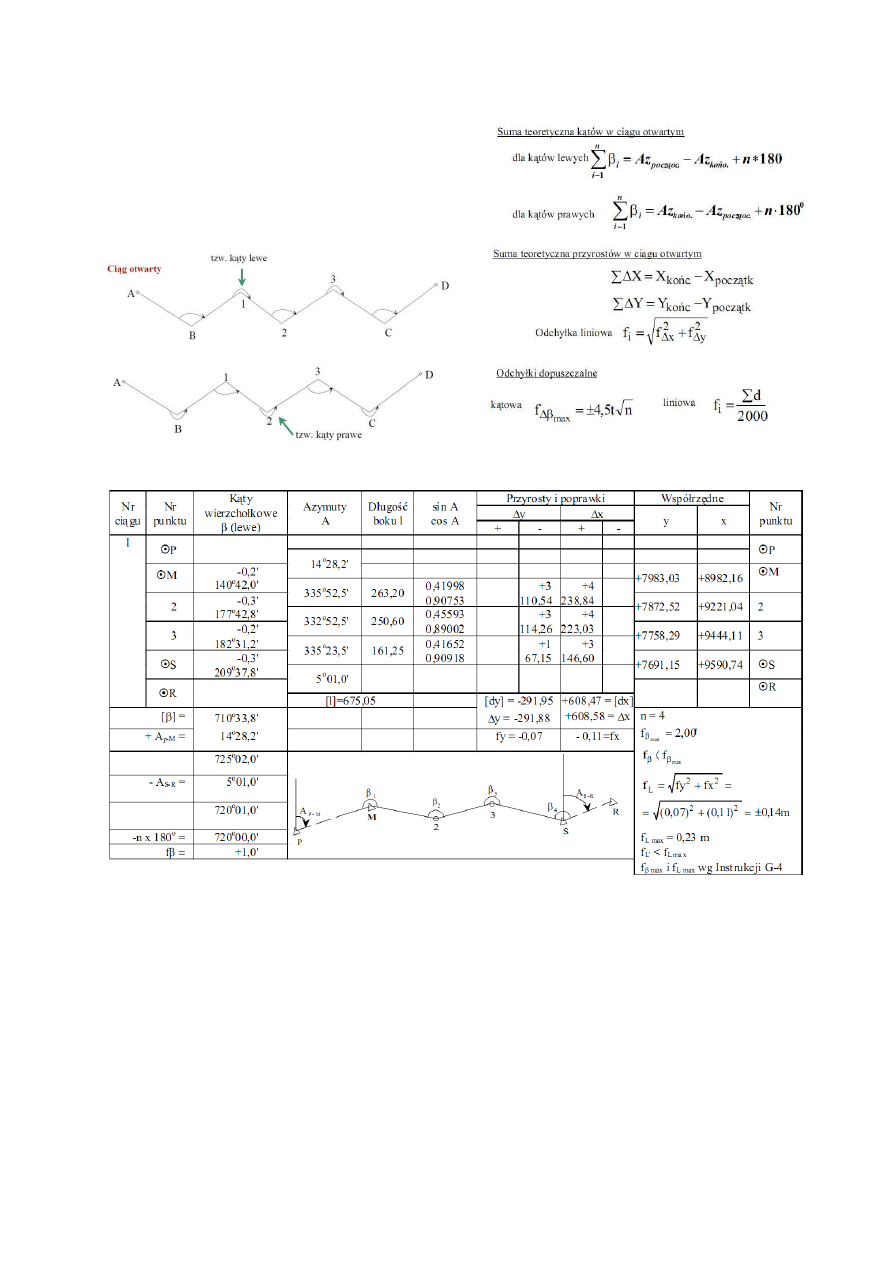
3
03. Obliczy
ć
azymuty ci
ą
gu sytuacyjnego na podstawie k
ą
tów wyrównanych.
Wzór na obliczenie azymutu nast
ę
pnego boku dla
k
ą
tów lewych:
B
o
BC
AB
180
Az
Az
β
+
−
=
Wzór na obl. azymutu nast
ę
pnego boku dla k
ą
tów
prawych:
B
o
BC
AB
180
Az
Az
β
−
+
=
t – dokładno
ść
odczytu w instrumencie
n – liczba mierzonych k
ą
tów
04. Tachimetria (wzory i opis metody).
-
Tachimetria polega na pomiarze sytuacyjno-wysoko
ś
ciowym (jednoczesnym) wykonywanym metod
ą
biegunow
ą
.
-
Pomiary tachimetryczne przeprowadza si
ę
w oparciu o osnowy geodezyjne, czyli punkty o znanych
współrz
ę
dnych geodezyjnych, za pomoc
ą
tachimetru lub teodolitu z nasadk
ą
dalmiercz
ą
.
-
Z punktu widzenia szczegółowych metod pomiaru tachimetria jest pomiarem biegunowym z po
ś
rednim
sposobem wyznaczenia odległo
ś
ci przy pomocy dalmierza kreskowego.
-
Biegunami układów s
ą
kolejne punkty osnowy.
-
Tachimetria pozwala na pomiar przy dowolnym pochyleniu osi celowej instrumentu (teodolitu).
-
Pomiar (zało
ż
enie osnowy, wybór punktów szczegółowych, odczytanie łaty i zapis do dziennika) wykonuje
si
ę
analogicznie jak w niwelacji punktów rozproszonych, a ponadto mierzy si
ę
k
ą
t nachylenia lunety
w płaszczy
ź
nie pionowej.
-
Metoda tachimetryczna pomiaru rze
ź
by terenu jest mniej dokładna od metod realizowanych z pomoc
ą
niwelatora, ale jest to metoda umo
ż
liwiaj
ą
ca znacznie szybsze wykonanie prac polowych.
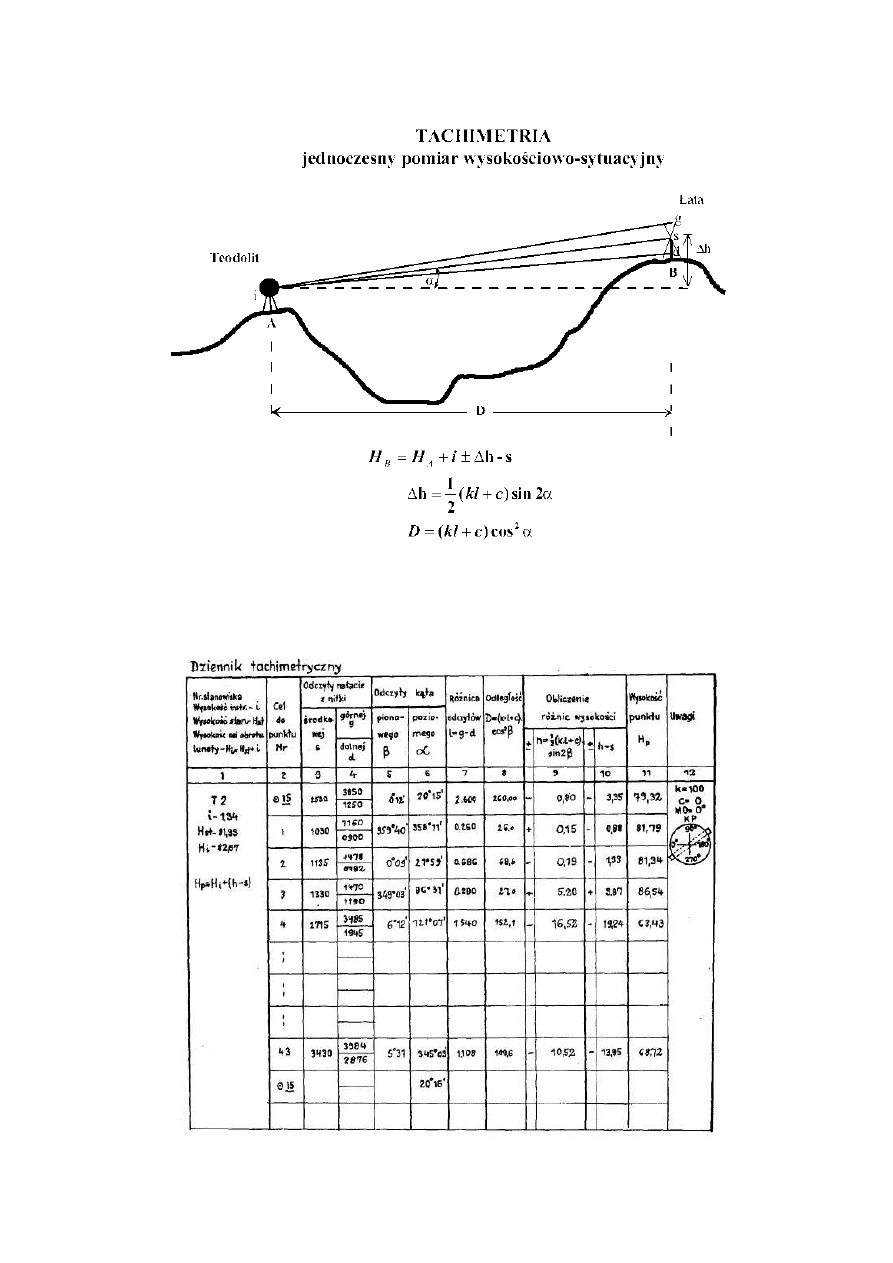
4
H
A
– wysoko
ść
punktu nad którym ustawiono instrument,
i – wysoko
ść
instrumentu,
α
– k
ą
t pionowy nachylenia osi celowej,
k – stała mno
ż
enia dalmierza kreskowego (najcz
ęś
ciej równa 100),
l – odcinek łaty wyznaczony odczytami górnym i dolnym,
s – odczyt
ś
rodkowy
5
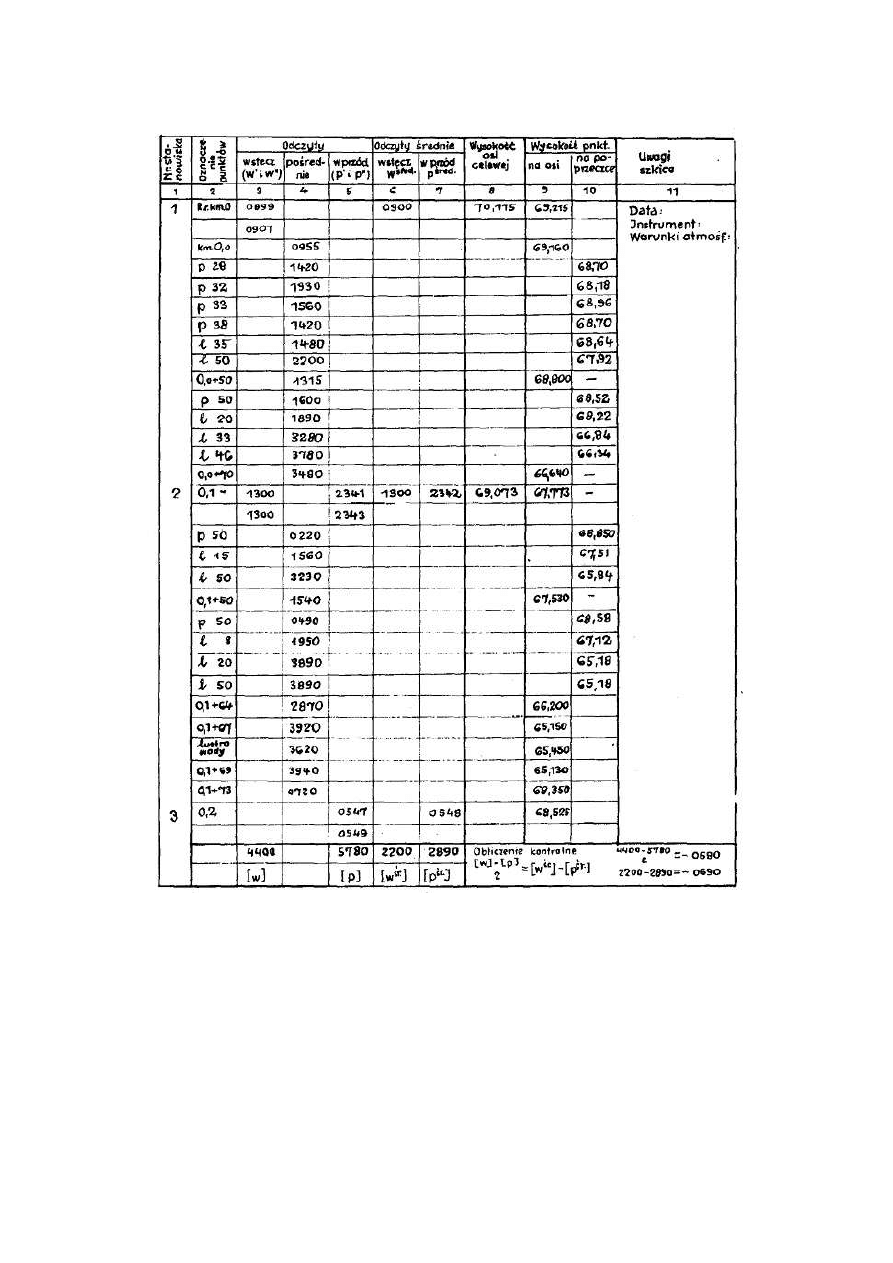
Dziennik niwelacyjny
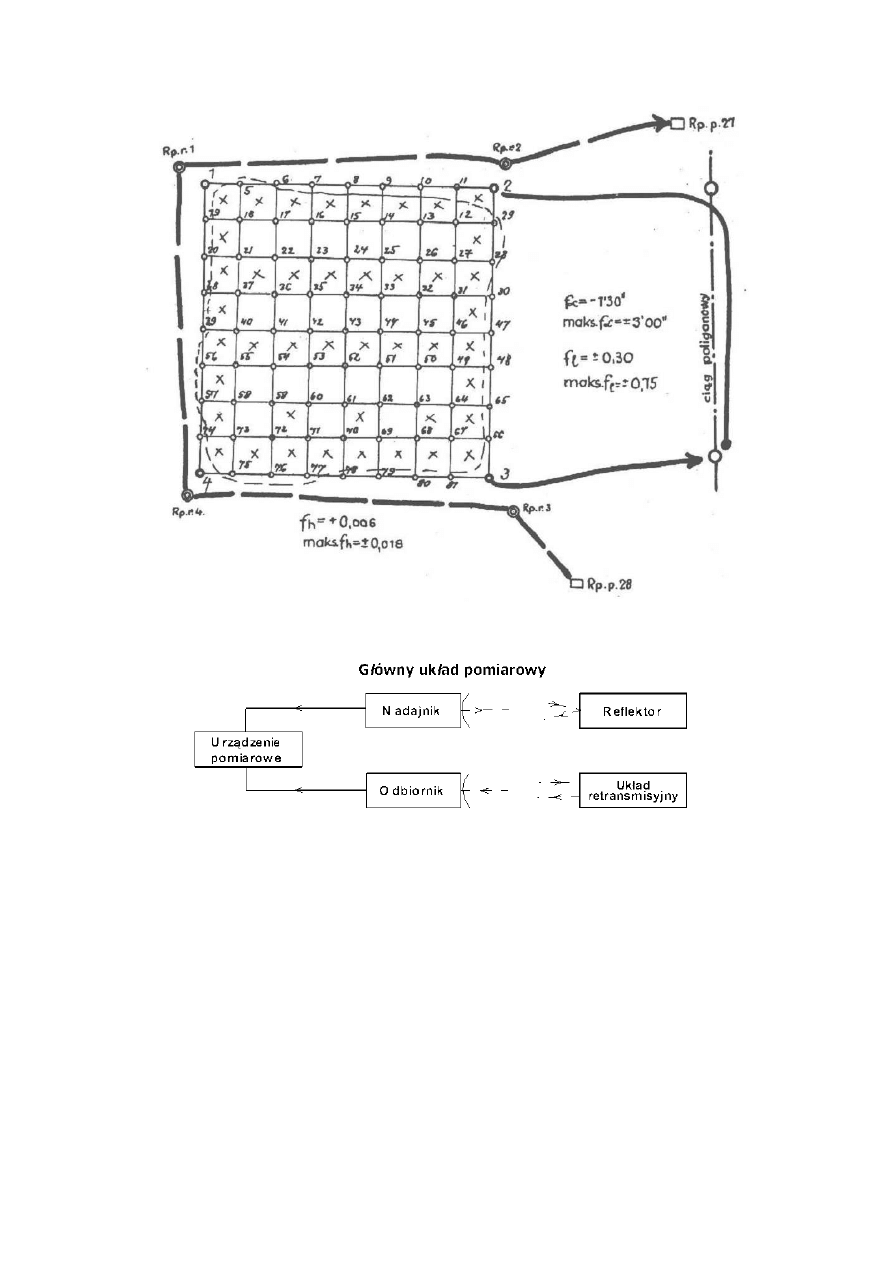
05. Niwelacja powierzchniowa siatkowa (rysunek i opis).
-
Wykonujemy j
ą
na terenach o niezbyt urozmaiconej rze
ź
bie terenu.
-
Nazwa pochodzi od siatki regularnych figur geometrycznych (najcz
ęś
ciej kwadratów o bokach 5, 10, 20,
50, 100m).
-
Metod
ą
niwelacji geometrycznej wyznacza si
ę
wysoko
ś
ci wszystkich wierzchołków siatki.
-
Numeracj
ę
tych wierzchołków prowadzi si
ę
: linie na jednym kierunku oznacza si
ę
kolejnymi liczbami, a
wzdłu
ż
drugiego kierunku – literami.
-
Pomiar niwelacyjny siatki zaczynamy z reperu. Je
ś
li znajduje si
ę
on poza terenem obj
ę
tym pomiarem,
wówczas prowadzimy ci
ą
g dowi
ą
zuj
ą
cy do momentu, a
ż
niwelator stanie na terenie obj
ę
tym pomiarem.
-
Od tego momentu po ka
ż
dym odczycie wstecz wykonujemy szereg odczytów po
ś
rednich do punktów
znajduj
ą
cych si
ę
w zasi
ę
gu danego stanowiska, po czym ko
ń
czymy odczytem w przód i zmieniamy
stanowisko.
-
Po zaniwelowaniu całej siatki prowadzimy ci
ą
g do najbli
ż
ej poło
ż
onego reperu w celu uzyskania kontroli
pomiarów.
-
Jest to metoda bardzo precyzyjna
6
06. Precyzyjny pomiar odległo
ś
ci metod
ą
modulacji impulsowej.
Nadajnik, urz
ą
dzenie elektroniczne słu
żą
ce do wytwarzania energii elektromagnetycznej wielkiej cz
ę
stotliwo
ś
ci,
przystosowanej do celów ł
ą
czno
ś
ci za po
ś
rednictwem fal radiowych.
Nadajnik składa si
ę
z generatora drga
ń
elektrycznych wielkiej cz
ę
stotliwo
ś
ci, wzmacniaczy wielkiej cz
ę
stotliwo
ś
ci,
wzmacniaczy małej cz
ę
stotliwo
ś
ci, modulatora (modulacja) oraz urz
ą
dze
ń
pomocniczych (np. zasilacza).
Aby dokona
ć
pomiaru czasu propagacji fali pomiarowej niezb
ę
dne jest zaznaczenie chwil, mi
ę
dzy którymi
mierzony jest ten czas. Do tego celu słu
ż
y modulacja fali pomiarowej, któr
ą
jest fala elektromagnetyczna.
Modulacja – samorzutna lub celowa zmiana parametrów fali no
ś
nej. Jest to proces fizyczny polegaj
ą
cy na
oddziaływaniu pewnego przebiegu wielko
ś
ci fizycznej zwanej sygnałem moduluj
ą
cym na inny przebieg
(modulowany) zwany fal
ą
no
ś
n
ą
, w wyniku czego uzyskuje si
ę
przebieg zw. sygnałem modulowanym.
Posta
ć
sygnału moduluj
ą
cego w istotny sposób okre
ś
la wła
ś
ciwo
ś
ci dalmierzy
-
modulacja impulsowa - dalmierze laserowe
-
modulacja sinusoidalna – wi
ę
kszo
ś
c pozostałych dalmierzy
-
modulacja sygnałem pseudo-przypadkowym - w niektórych dalmierzach hydrograficznych
-
pomiar odbywa si
ę
bezpo
ś
rednio na optycznej fali no
ś
nej - dalmierze interferencyjne.
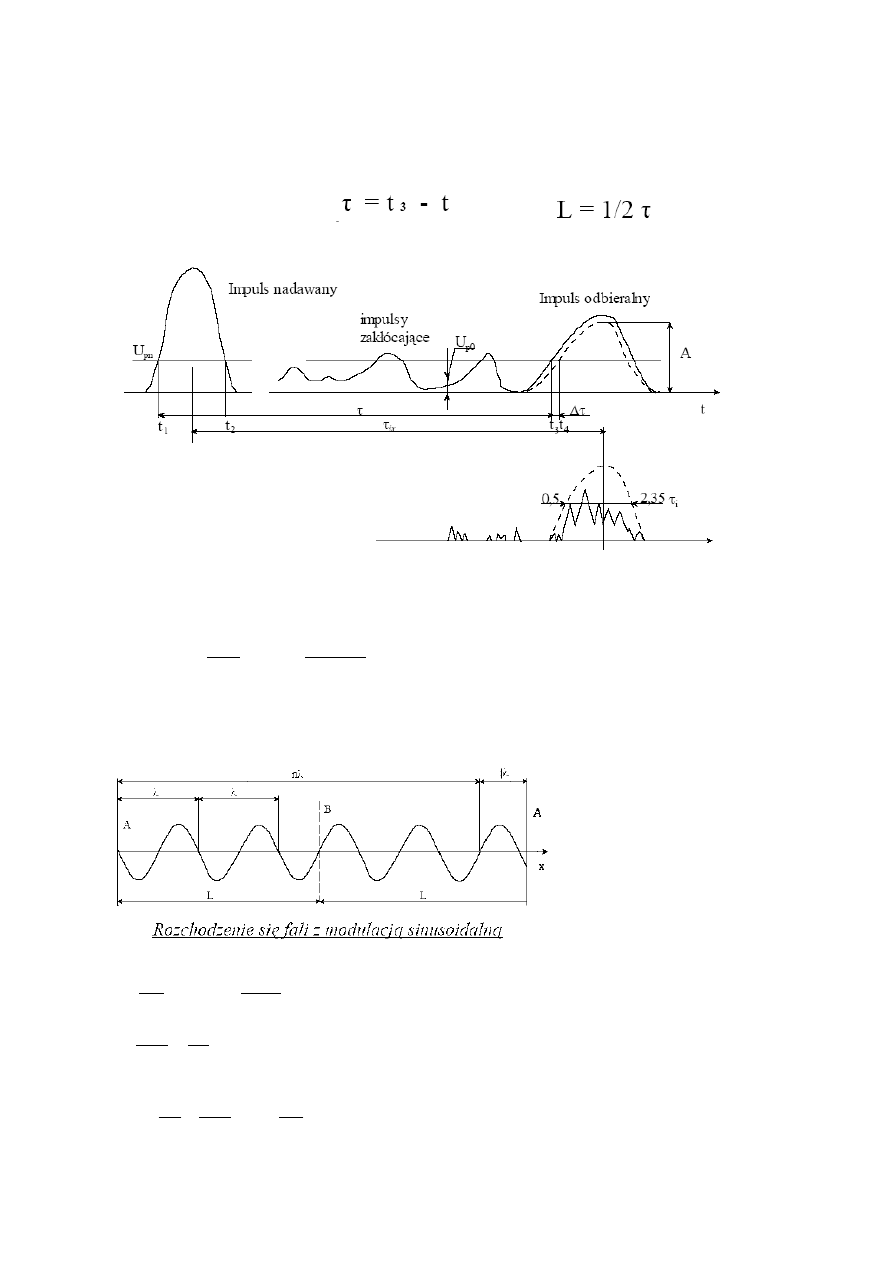
7
Modulacja impulsowa – fala no
ś
na jest okresowym ci
ą
giem impulsów. U
ż
ywana w dalmierzach laserowych.
Jedna z mo
ż
liwo
ś
ci pomiaru czasu propagacji fali
τ
na drodze 2L sprowadza si
ę
do wyznaczenia czasu mi
ę
dzy
chwilami t
3
i t
1
, w których sygnał odbierany przekracza próg Up
o
, a sygnał nadawany próg Up
n
.
Wzory:
v
2
/
1
L
t
t
1
3
⋅
τ
⋅
=
−
=
τ
07. Precyzyjny pomiar odległo
ś
ci metod
ą
modulacji sinusoidalnej (wzory, opis
metody, rysunek).
Sinusoidalny przebieg moduluj
ą
cy fal
ę
no
ś
n
ą
nadajnika ma zazwyczaj znacznie mniejsz
ą
długo
ść
, ani
ż
eli
mierzony odcinek L. Proces rozchodzenia si
ę
zmodulowanej fali wzdłu
ż
bie
żą
cej drogi x opisuje równanie fali:
(
)
ϕ
+
⋅
π
=
⋅
⋅
⋅
π
=
λ
⋅
⋅
π
=
τ
⋅
ω
n
2
v
f
L
2
2
L
2
2
w
w
w
f
w
,
ϖ
w
,
λ
w
– cz
ę
stotliwo
ść
, pulsacja oraz długo
ść
fali wzorcowej,
n – liczba całkowita pełnych k
ą
tów 2
π
zawartych w
ϖ
w
τ
,
ϕ
– liczba ułamkowa 0 <
ϕ
< 1 okre
ś
laj
ą
ca niepełn
ą
cz
ęść
przesuni
ę
cia fazowego,
v – pr
ę
dko
ść
fali pomiarowej.
Z powy
ż
szego wzoru uzyskuje si
ę
kolejne równania:
(
)
(
)
(
)
(
)
ϕ
+
⋅
=
ϕ
+
⋅
=
⋅
=
τ
ϕ
+
⋅
⋅
=
ϕ
+
⋅
λ
=
n
T
n
f
1
v
L
2
n
f
2
v
n
2
L
w
w
w
w
Natomiast graniczny bł
ą
d pomiaru odległo
ś
ci wynosi:
ϕ
⋅
∆
⋅
λ
+
⋅
∆
+
∆
=
∆
2
L
f
f
v
v
L
w
w
w
dla L = 1,5km
∆
L = 1,15cm
dla L = 15km
∆
L = 2,5cm
8
08. Ogólna zasada działania systemu GPS (opisz poszczególne segmenty)
System skł
ą
da si
ę
z trzech podstawowych segmentów:
SEGMENT KOSMICZNY
-
24 satelity poruszaj
ą
ce si
ę
po orbitach wokół kuli ziemskiej.
-
Satelity nadaj
ą
z pokładu dwie cz
ę
stotliwo
ś
ci radiowe z kodowanymi informacjami o czasie oraz
depesz
ę
satelitarn
ą
– zbiorem informacji niezb
ę
dnych dla u
ż
ytkownika.
SEGMENT KONSTROLNY
-
składa si
ę
z głównej stacji kontrolnej i kilku stacji monitoruj
ą
cych.
-
Główna stacja Master Control Station (MSC)
ś
ledzi, monitoruje oraz zarz
ą
dz cał
ą
konstelacj
ą
sateltów i
uaktualnia dane nawigacyjne.
-
Stacje monitoruj
ą
ce, wyposa
ż
one w precezyjne wzorce cezowe oraz odbiorniki maj
ą
ce mo
ż
liwo
ść
generowania kodu P( precyzyjnego), wykonuj
ą
nieprzerwanie obserwacje wszystkich satelitów
rejestruj
ą
c kolejne pomiary co 1,5 s.
-
Pomiary przekazywane s
ą
do stacji (MSC). Stacje kontrolne zapewniaj
ą
ł
ą
czno
ść
mi
ę
dzy satelitami a
MSC. Przesyłaj
ą
satelitom do pami
ę
ci ich komputerów informacje o ich efemerydach (dane orbitalne) i
dane dotycz
ą
ce korekty chodu zegarów satelitów.
SEGMENT U
ś
YTKOWNIKA
-
składa si
ę
z wielu ró
ż
nych odbiorników radionawigacyjnych, specjalnie przygotowanych do odbioru,
dekodowania i przetwarzania sygnałów satelitarnych oraz wykonywania oblicze
ń
zmierzaj
ą
cych do
ustalenia wymaganych parametrów nawigacyjnych – pozycji, pr
ę
dko
ś
ci, kursu itp..
-
Głównymi u
ż
ytkownikami GPS s
ą
słu
ż
by wojskowe. W wi
ę
kszo
ś
ci s
ą
to odbiorniki
jednocz
ę
stotliwo
ś
ciowe, zaopatrzone w kod P, daj
ą
cy mo
ż
liwo
ść
natychmiastowego wyznaczenia
pozycji z dokładno
ś
ci do 10 m.
-
U
ż
ytkownicy cywilni okre
ś
laj
ą
pozycje mniej lub bardziej dokładnie – w czasie rzeczywistym lub po
fakcie.
-
W zale
ż
no
ś
ci od przeznaczenia wszystkie odbiorniki mo
ż
na podzieli
ć
na: nawigacyjne (o małej
dokładno
ś
ci), geodezyjne (dokładne - o wysokiej dokładno
ś
ci) oraz specjalne.
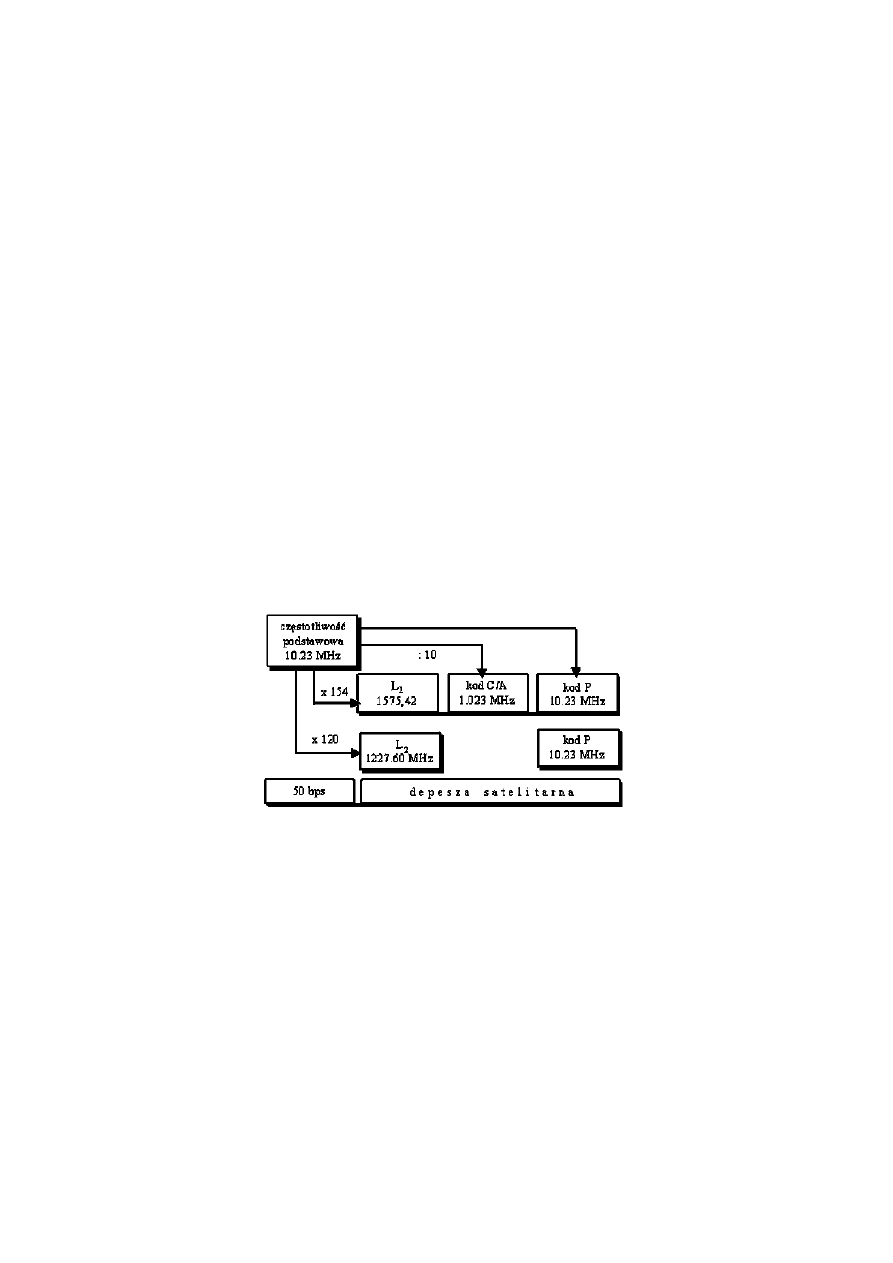
09. Elementy sygnału satelity GPS
(w jaki sposób powstaj
ą
fale no
ś
ne L1, L2,kod C/A i P ?)
Cz
ę
stotliwo
ś
ci:
-
Satelity GPS wyposa
ż
one s
ą
w zegary atomowe (wzorce rubidowe lub cezowe) wytwarzaj
ą
ce
wysokostabiln
ą
cz
ę
stotliwo
ść
podstawow
ą
10,23 MHz.Jest to podstawowa cz
ę
stotliwo
ść
systemu. W
oparciu o ni
ą
satelita emituje w sposób ci
ą
gły dwa sygnały na dwóch kanałach – o cz
ę
stotliwo
ś
ci L
1
i L
2
,
które s
ą
no
ś
nymi dla przenoszenia informacji o czasie oraz nadania depeszy satelitarnej (tj. zbioru
informacji niezb
ę
dnych dla u
ż
ytkownika).
-
Cz
ę
stotliwo
ść
L
1
otrzymujemy przez pomno
ż
enie cz
ę
stotliwo
ś
ci podstawowej przez 154 co daje
1575,42 MHz i odpowiada długo
ś
ci fal krótkich około 19,05 cm.
-
Cz
ę
stotliwo
ść
L
2
otrzymujemy przez pomno
ż
enie cz
ę
stotliwo
ś
ci podstawowej przez 120 co daje
1227,60 MHz i odpowiada długo
ś
ci fal krótkich około 24,45 cm.
Cz
ę
stotliwo
ś
ci no
ś
ne poddane s
ą
modulacji kodowo-impulsowej (ci
ą
gi impulsów binarnych +1 albo –1).
Zmodulowane sygnały maj
ą
charakter pseudoprzypadkowy PRN (Pseudo Random Noise), przypominaj
ą
cy
szum.
Kodowanie:
-
kod C/A (coarse acquisition – powszechnie dost
ę
pny) – gdzie sygnał koduj
ą
cy jest wytwarzany z
cz
ę
stotliwo
ś
ci podstawowej podzielonej przez 10, czyli wynosi 1,023Mhz co odpowiada długo
ś
ci fali
293,1m, za
ś
jego okres wynosi 1ms.
-
kod P (precise, protected), sygnał moduluj
ą
cy ma cz
ę
stotliwo
ść
identyczn
ą
jak podstawowa, czyli
10,023MHz
9
Sepesza satelitarna:
Na zmodulowane sygnały P i C/A nało
ż
ona jest m.in. informacja w postaci depeszy satelitarnej, uaktualniana
co cztery godziny ze stacji naziemnych. Depesza zawiera m.in.
almanach – dane dotycz
ą
ce aktualnego stanu systemu, w tym przybli
ż
one elementy orbitalne wszystkich
satelitów, których znajomo
ść
przyspiesza proces akwizycji (przechwytywania) danych.
efemeryd
ę
– dokładne elementy orbitalne satelity nadaj
ą
cego depesz
ę
, niezb
ę
dne do wyznaczania czasu i
pozycji
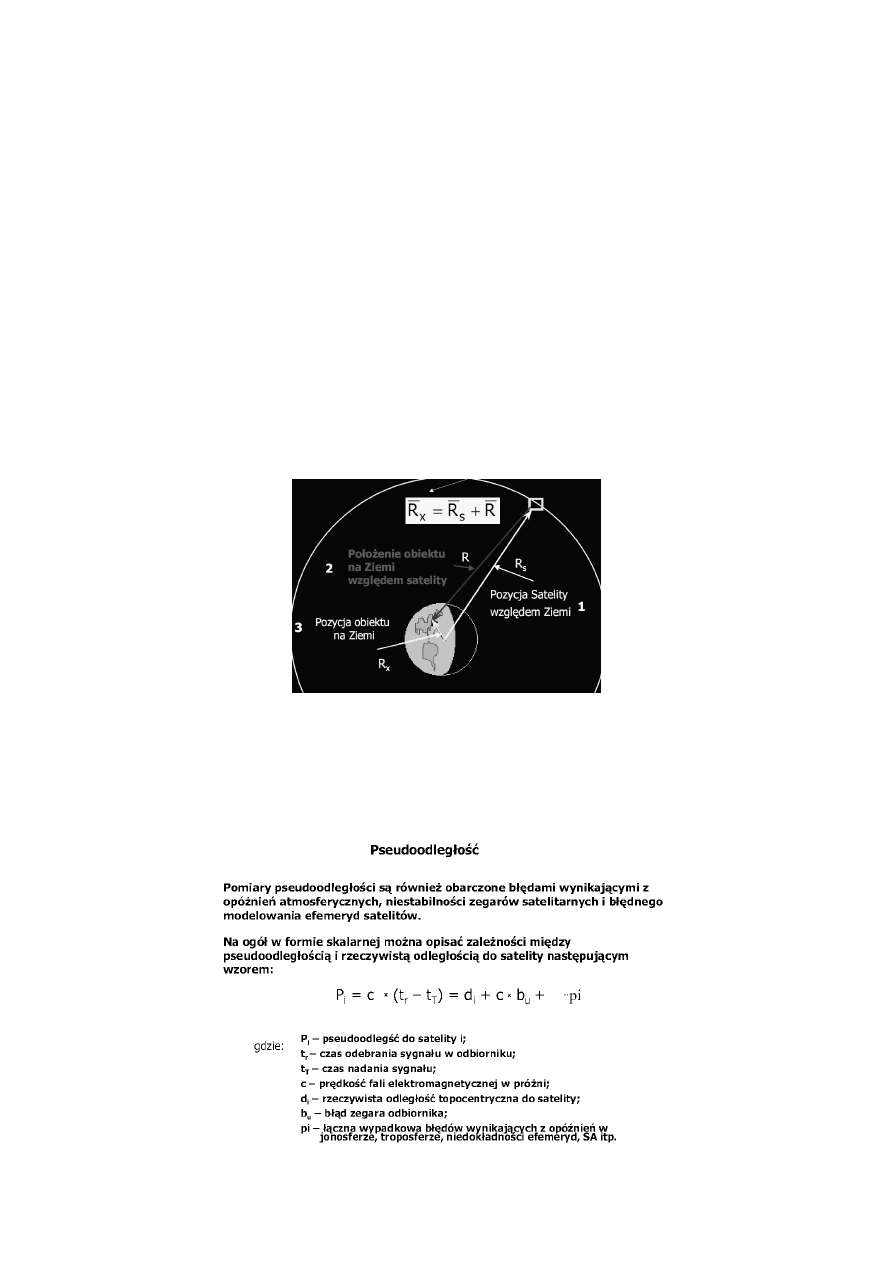
10. Koncepcja wyznaczania pozycji metod
ą
GPS.
-
Odbiornik GPS, aby wyznaczy
ć
pozycj
ę
, musi odbiera
ć
i
ś
ledzi
ć
sygnały satelitarne (by mierzy
ć
pseudoodleg
ś
ci i przyrosty pseudoodległo
ś
ci) oraz kolekcjonowa
ć
depesz
ę
nawigacyjn
ą
. Podstawowa
idea, która umo
ż
liwia wyznaczenie pozycji punktu (odbiornika) opiera si
ę
na wiedzy o odległo
ś
ciach
pomi
ę
dzy nim a satelitami znajduj
ą
cymi si
ę
na orbitach okołoziemskich.
-
Je
ż
eli znamy odległo
ść
mi
ę
dzy jednym satelit
ą
, a odbiornikiem jeste
ś
my w stanie okre
ś
li,
ż
e odbiornik
znajduje si
ę
„gdzie
ś
” na powierzchni sfery o promieniu równym zmierzonej odległo
ś
ci.
-
Pomi
ę
dzy dwiema satelitami a odbiornikiem – punkt (odbiornik) znajduje si
ę
na okr
ę
gu, który tworz
ą
dwie przecinaj
ą
ce si
ę
sfery o prom. równych odległo
ś
ciom mi
ę
dzy odbiornikiem a poszczególnymi
satelitami.
-
Znajomo
ść
odległo
ś
ci trzech satelitów powoduje,
ż
e istniej
ą
tylko dwa punkty, w których znajduje si
ę
odbiornik (punkty te tworz
ą
si
ę
w miejscach przeci
ę
cia si
ę
trzech sfer o promieniach równych
odległo
ś
ciom od poszczególnych satelitów), Jeden z tych punktów mo
ż
na wykluczy jako poruszaj
ą
cy si
ę
zbyt szybko lub b
ę
d
ą
cy za wysoko.
1 - Pozycja satelity jest okre
ś
lana wzgl
ę
dem Ziemi.
2 - Poło
ż
enie obiektu na Ziemi mo
ż
e by
ć
okre
ś
lane wzgl
ę
dem satelity.
3 - Pozycja obiektu na Ziemi mo
ż
e by
ć
okre
ś
lona jest jako wektor
sumy pozostałych wektorów otrzymanych z dwóch pomiarów.
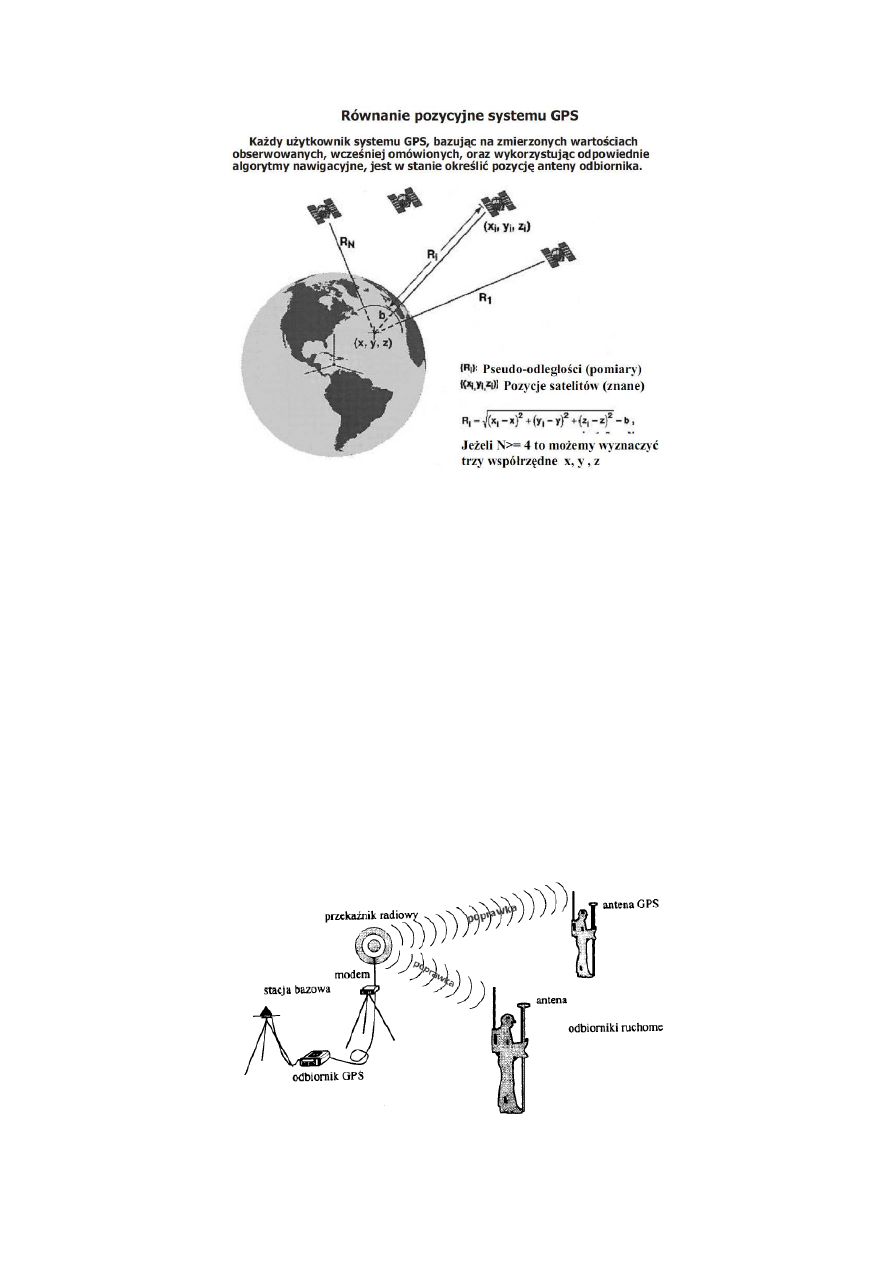
11. Wyznaczenie współrz
ę
dnych w obserwacjach GPS
(pseudoodległo
ść
, równanie nawigacyjne, równanie pozycyjne):
10
12. Ogólne zało
ż
enia systemu ró
ż
nicowego DGPS.
-
Polska nazwa DGPS (Differential GPS) to ró
ż
nicowe pomiary GPS.
-
Jest to metoda okre
ś
lenia w czasie rzeczywistym pozycji ruchomego odbiornika GPS wzgl
ę
dem innego,
nieruchomego odbiornika, zwanego stacj
ą
bazow
ą
, umieszczonego na punkcie o znanej pozycji.
-
Istota pomiarów DGPS polega na tym,
ż
e stacja bazowa wykonuj
ą
c ci
ą
głe obserwacje kodowe na
znanym punkcie (o znanych współrz
ę
dnych w pewnym układzie) dokonuje w sposób ci
ą
gły wyznaczenia
swojej pozycji, stosuj
ą
c rozwi
ą
zanie nawigacyjne.
-
Oblicza przy tym poprawk
ę
uwzgl
ę
dniaj
ą
c ró
ż
nic
ę
wyniku otrzymanego z obserwacji i znanych
współrz
ę
dnych.
-
Poł
ą
czona z modemem i przeka
ź
nikiem radiowym stacja bazowa przekazuje t
ę
poprawk
ę
do
ruchomego odbiornika. Obecnie stosuje si
ę
dwa zasadnicze podej
ś
cia do wyznaczania poprawek
ró
ż
nicowych i ich transmisji ze stacji bazowej do ruchomego odbiornika:
•
obliczanie i transmisja poprawek do współrz
ę
dnych,
•
obliczanie i transmisja poprawek do pseudoodległo
ś
ci.
-
Transmisja poprawek do współrz
ę
dnych wymaga synchronicznego
ś
ledzenia tych samych satelitów
przez stacj
ę
bazow
ą
i przez ruchom
ą
.
-
Zalet
ą
tego podej
ś
cia jest mo
ż
liwo
ść
wykonywania wi
ę
kszej cz
ęś
ci oblicze
ń
przez stacj
ę
bazow
ą
.
Najcz
ęś
ciej jednak stosuje si
ę
transmisj
ę
poprawek do pseudoodległo
ś
ci.
-
Przy pomiarach DGPS zakłada si
ę
,
ż
e wpływ bł
ę
dów obserwacji i zakłócaj
ą
cych oddziaływa
ń
ś
rodowiska pomiarowego (troposfery i jonosfery) na obydwa odbiorniki jest taki sam.
11
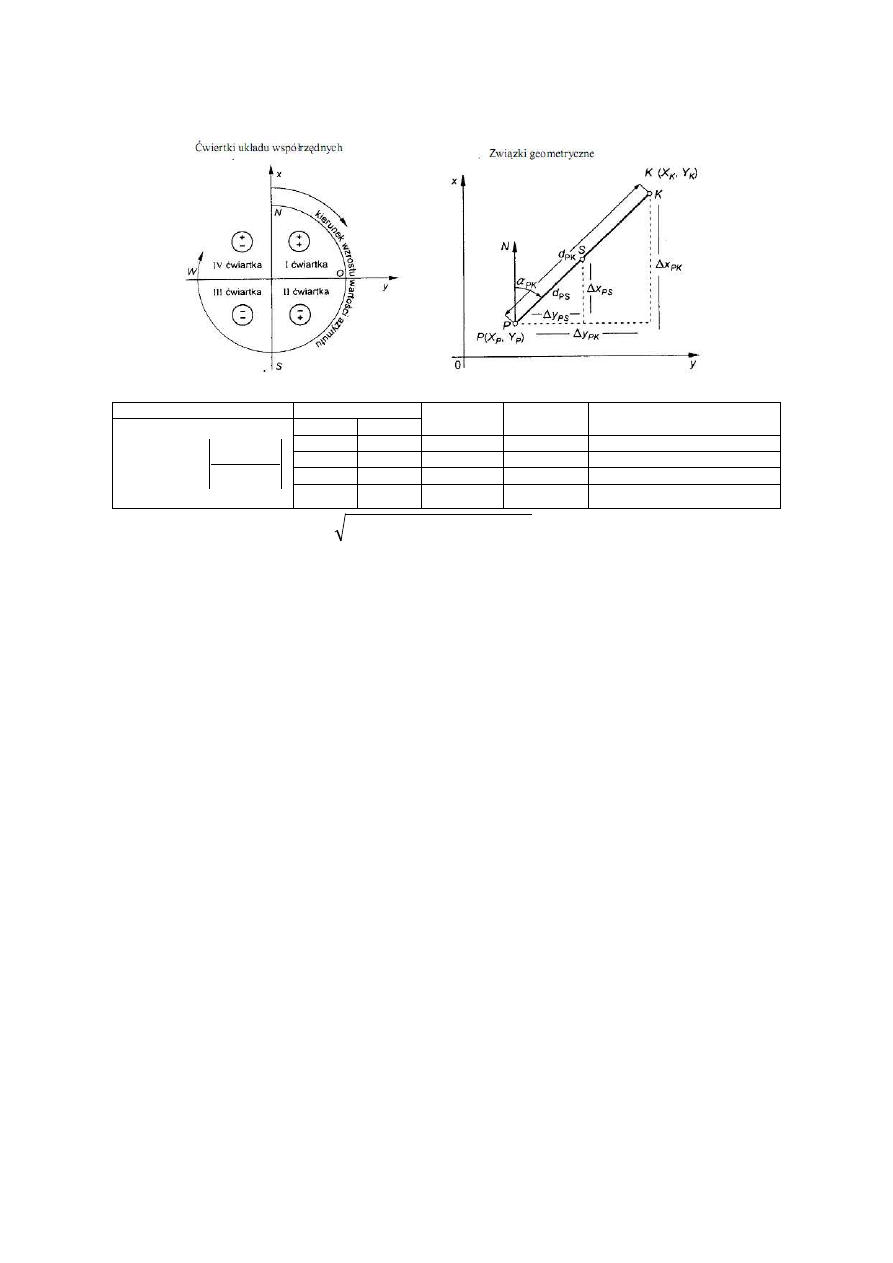
13. Obliczenie azymutu i odługo
ś
ci odcinka ze współrz
ę
dnych
czwartak:
znaki przyrostów
∆
Y
∆
X
nr i ozn.
ć
wiartki
zakres
azymutu
Zale
ż
no
ść
mi
ę
dzy azymutem
a czwartakiem
+
+
I (NE)
0º–90º
Az =
α
+
–
II (SE)
90º–180º
Az = 180º –
α
–
–
III (SW)
180º–270º
Az = 180º +
α
A
B
A
B
AB
X
X
Y
Y
arctg
−
−
=
α
–
+
IV (NW)
270º–360º
Az = 360º –
α
Wzór na długo
ść
odcinka AB:
(
) (
)
2
A
B
2
A
B
X
X
Y
Y
D
−
+
−
=
14. Tyczenie prostej przez przeszkod
ę
z wykorzystaniem ci
ą
gu sytuacyjnego
lokalnego:
1. zało
ż
enie osnowy pomiarowej w formie zamkni
ę
tego ci
ą
gu poligonowego:
-
wybór punktów,
-
zastabilizowanie ich kołkami
-
ich opis topograficzny)
2. ustawienie i wypoziomowanie TotalStation nad pierwszym punktem osnowy, wycelowanie na s
ą
siednie
punkty i wykonanie pomiaru k
ą
tów poziomych
3. powtórzenie procedury z poprzedniego punktu dla kolejnych wierzchołków osnowy
4. pomiar odległo
ś
ci mi
ę
dzy punktami za pomoc
ą
dalmierza (ka
ż
da odległo
ść
mierzona jest czterokrotnie)
5. sprawdzenie poprawno
ś
ci pomiaru k
ą
tów przy u
ż
yciu wzoru na dopuszczaln
ą
odchyłk
ę
k
ą
tow
ą
6. wyrównanie pomierzonych k
ą
tów i obliczenie na ich podstawie azymutów poszczególnych odcinków
7. obliczenie przyrostów obliczonych
∆
x i
∆
y dla poszczególnych punktów
8. obliczenie odchyłki liniowej – odległo
ś
ci mi
ę
dzy pierwszym punktem ci
ą
gu (np. A), a ostatnim (A’),
wynikaj
ą
ca z niedokładno
ś
ci pomiarów (w rzeczywisto
ś
ci jest to ten sam punkt)
9. sprawdzenie poprawno
ś
ci pomiarów przy u
ż
yciu wzoru na dopuszczaln
ą
odchyłk
ę
liniow
ą
10. wyrównanie przyrostów obliczonych i obliczenie przyrostów wyrównanych dla wszystkich punktów ci
ą
gu
11. obliczenie azymutu szukanej prostej oraz jej wytyczenie poprzez odło
ż
enie za pomoc
ą
TotalStation
obliczonych k
ą
tów mi
ę
dzy ni
ą
, a kraw
ę
dzi
ą
osnowy pomiarowej z obu ko
ń
ców szukanej prostej (2
wierzchołki osnowy pomiarowej)
15. Na czym polega mechanizm GIS ?
System informacji geograficznej GIS:
1. zorganizowany zestaw sprz
ę
tu komputerowego, oprogramowania, danych geograficznych
(przestrzennych i nieprzestrzennych) oraz osób (wykonawców i u
ż
ytkowników);
2. stworzony w celu efektywnego gromadzenia, magazynowania, udost
ę
pniania, obróbki, analizy i
wizualizacji wszystkich danych geograficznych;
3. GIS udost
ę
pnia mechanizmy wprowadzania, gromadzenia i przechowywania danych przestrzennych
oraz zarz
ą
dzania nimi;
4. zapewnia ich integralno
ść
i spójno
ść
oraz pozwala na ich wst
ę
pn
ą
weryfikacj
ę
;
5. na podstawie zgromadzonych w systemie danych mo
ż
liwe jest przeprowadzenie specyficznych analiz
opieraj
ą
cych si
ę
m.in. na relacjach przestrzennych pomi
ę
dzy obiektami;
6. wyniki analiz przestrzennych i operacji charakterystycznych dla programów bazodanowych
przedstawione mog
ą
by w postaci opisowej (tabelarycznej) lub graficznej (mapa, diagramy, wykresy,
rysunki), st
ą
d cech
ą
GIS jest wizualizacja i udost
ę
pnienie informacji przestrzennych w
żą
danej postaci.
Wyszukiwarka
Podobne podstrony:
Zagadnienia do opracowania na kolokwium zaliczeniowe2
STATYSTYKA MATEMATYCZNA Opracowanie na kolokwium
zagadnienia opracowane na kolokwium nr3 (marynaty, soki)
Opracowanie na kolokwium z psychologii społecznej, Uczelnia, Psychologia społeczna
OPRACOWANIE NA KOLOKWIUM Z ETYKI, medycyna, II rok, etyka lekarska, notatki, opracowania
Fizyka budowli opracowanie na kolokwium
Opracowanie na kolokwium, Akademia Morska, I semestr, urządzenia nawigacyjne, Test do Gucmy, Urządze
Opracowanie na kolokwium, Automatyka i Robotyka, Semestr 4, Metody sztucznej inteligencji
Metody badań ilościowych - Opracowanie na kolokwium, pedagogika
zachowania konsumenckie - opracowanie na kolokwium (notatki z zajęć), Uniwersytet Wrocławski, zachow
zagadnienia opracowane na kolokwium nr 2 (dżemy,kompoty,kapusta kiszona,mrożonki)
ubytkowa, Studia PWr W-10 MBM, Semestr V, Obróbka Ubytkowa, Kolokwium, pytania, opracowania, Pytania
Pojazdy opracowanie na kolokwium
Opracowanie na kolokwium redukcjie i anomalie
OPRACOWANE na kolokwium
Opracowanie na kolokwium
PZRP - OPRACOWANEpytania na kolokwium, Dyplomaca Europejska, 4 semestr, polit ZP, polit ZP, Polityka
więcej podobnych podstron