Politechnika Wrocławska |
LABORATORIUM PODSTAW ROBOTYKI |
Termin: piątek P 8.00-11.00 |
Skład grupy:
|
Temat:
Metody interpolacji. |
Data: |
|
|
Ocena: |
Wprowadzenie:
Celem naszego ćwiczenia jest zapoznanie się z metodami interpolacji oraz porównanie ich. W tym celu wykorzystujemy specjalnie do tego celu stworzoną aplikacje. Zadaniem interpolacji jest utworzenie funkcji, która przebiega przez zadane punkty. Stosuje się różne klasy funkcji do interpolowania - wielomiany algebraiczne, sklejania funkcji.
Przebieg ćwiczenia:
Dane wprowadzone do aplikacji jednakowe dla wszystkich metod:
L1=5; L2=5 -długość ramion robota
q0=15 i 20 [st] i qf=30 i 40 [st] - konfiguracja początkowa i końcowa podawana w stopniach;
v0=10 i 10 [st/s] i vf=30 i 30 [st/s] - prędkość na końcach przedziału;
a0= 5 i 5 [st/s2] i af=20 i 20 [st/s2] - przyśpieszenie na końcach przedziału;
ilość węzłów 5;
INTERPOLACJA WIELOMIANAMI TRZECIEGO STOPNIA Z CIĄGŁYM PRZYSPIESZENIEM
Gwarantuje ciągłość pochodnej toru drugiego rzędu w przestrzeni konfiguracyjnej. Wyznacza tor będący sklejeniem wielomianów stopnia trzeciego ciągłych pochodnych do rzędu drugiego w N - konfiguracjach węzłowych.
W wyniku przeprowadzonych symulacji wygenerowaliśmy następujące wykresy:
INTERPOLACJA WIELOMIANAMI STOPNIA TRZECIEGO CIĄGŁĄ PRĘDKOŚCIĄ
Metoda ta gwarantuje ciągłość pochodnej toru pierwszego rzędu w przestrzeni konfiguracyjnej. Trzy algorytmy różniące się sposobem wyznaczania prędkości węzłowych pośrednich:
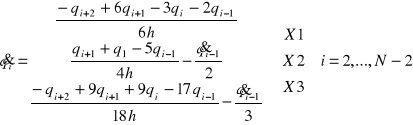
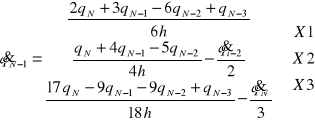
Wyznacza tor będący sklejeniem wielomianów stopnia trzeciego ciągłych pochodnych do pierwszego rzędu. Poniżej wykresy przedstawiające omówioną metodę.
METODA KONTROLOWANEGO ODCHYLENIA OD ŚCIEŻKI PROSTOLINIOWEJ (ALGORYTM TAYLORA).
Metoda ta polega na takim wyznaczeniu ścieżki wynikowej w przestrzeni zadaniowej aby nieodbiegała ona od ścieżki zadanej na odległość większą niż założona przez użytkownika (błąd śledzenia w naszym przypadku ustawiony został na poziomie 0,5). W tym przykładzie wprowadziliśmy tylko wartości L1 i L2 oraz q0 i qf (z których wyliczane są punkty brzegowe) ponieważ tylko te były dostępne. Poniżej mamy wygenerowane wykresy.
ZMODYFIKOWANA METODA KONTROLOWANEGO ODCHYLENIA OD ŚCIEŻKI PROSTOLINIOWEJ (ZMODYFIKOWANY ALGORYTM TAYLORA)
Ta metoda polega na takim sposobie dodawania punktów węzłowych, by błąd śledzenia osiągnął maksymalną dopuszczalną wartość. Od zwykłego algorytmy Taylora różni się właśnie mniejszą liczbą punktów węzłowych, a co za tym idzie mniejszą liczbą skoków prędkości na wynikowym torze. W tym przypadku tak jak poprzednio zadajemy jedynie długość ramion robota oraz konfigurację początkową na podstawie której zostają wyliczone punkty brzegowe.
Wnioski i spostrzeżenia:
W ćwiczeniu tym dokonaliśmy symulacji wykorzystując różne metody interpolacji dla tych samych wartości zadanych. Dzięki specjalnie pod tym kątem stworzonej aplikacji możemy w łatwy sposób zbadać trajektorie i określić różnice między nimi. Łatwo możemy zauważyć różnice pomiędzy wynikami naszych pomiarów, są one zobrazowane wykresami zamieszczonymi poniżej każdej wyszczególnionej metody interpolacyjnej.
Wyszukiwarka
Podobne podstrony:
sprawko 3 interpolacja, Automatyka i robotyka air pwr, VI SEMESTR, Notatki.. z ASE, metody numeryczn
analogowe sprawko cw B, Automatyka i robotyka air pwr, VI SEMESTR, Analogowe i cyfr. syst. pom
Metody sprawko calka, Automatyka i robotyka air pwr, VI SEMESTR, Metody numeryczne
sprawko cw3, Automatyka i robotyka air pwr, VI SEMESTR, Notatki.. z ASE, teoria automatow
Automatyka SPRAWKO nandy, Automatyka i robotyka air pwr, IV SEMESTR, Podstawy automatyki 2, laborki
sprawko 2 izy, Automatyka i robotyka air pwr, VI SEMESTR, Notatki.. z ASE, metody numeryczne, lab 2
Robotyka ROMIK sprawko, Automatyka i robotyka air pwr, V SEMESTR, robotyka, Robotyka, Nowy folder, r
sprawko 7 calkowanie, Automatyka i robotyka air pwr, VI SEMESTR, Metody numeryczne
SPRAWKO Aitken, Automatyka i robotyka air pwr, VI SEMESTR, Metody numeryczne
sprawko 2 moje, Automatyka i robotyka air pwr, VI SEMESTR, Metody numeryczne, lab 2 seidel
SPRAWKO ĆW1, Automatyka i robotyka air pwr, IV SEMESTR, Podstawy automatyki 2, laborki, CW.1
sprawko 7 calkowanie, Automatyka i robotyka air pwr, VI SEMESTR, Notatki.. z ASE, metody numeryczne,
energo sprawko cw12, Automatyka i robotyka air pwr, VI SEMESTR, Energoelektronika 2
energo sprawko 13, Automatyka i robotyka air pwr, VI SEMESTR, Energoelektronika 2, cw13
Sprawko romik, Automatyka i robotyka air pwr, V SEMESTR, robotyka, Robotyka, Nowy folder, robotyka g
roboty - interpolacja, Automatyka i robotyka air pwr, V SEMESTR, robotyka, Robotyka, Nowy folder
sprawko 5 aproksymacja, Automatyka i robotyka air pwr, VI SEMESTR, Notatki.. z ASE, metody numeryczn
więcej podobnych podstron