|
POLITECHNIKA WROCŁAWSKA
|
Skład grupy:
Łukasz Kopeć (177127) Kamil Mycka
|
Wydział: Elektryczny Termin: Semestr zimowy 11/12 Grupa 4 |
|
Data ćwiczenia: 24.10.2011 |
Laboratorium Podstaw Automatyki
|
|||
Temat: Identyfikacja parametrów geometrycznych robota dydaktycznego ROMIK |
Ocena:
|
|||
Cel ćwiczenia
Celem ćwiczenia jest zapoznanie się ze strukturą kinematyczną robota dydaktycznego ROMIK, wyliczenie kinematyki robota oraz identyfikacja jego parametrów geometrycznych.
Przebieg ćwiczenia
Obliczenie modelu kinematyki za pomocą transformacji Denavita-Hartenberga
Współrzędne zmodyfikowane:
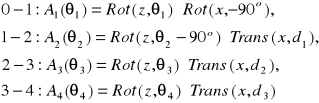
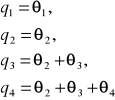
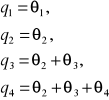
Zależność między klasycznymi współrzędnymi przegubowymi robota a współrzędnymi zmodyfikowanymi:
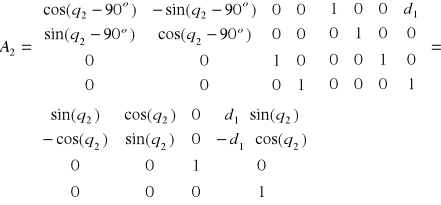
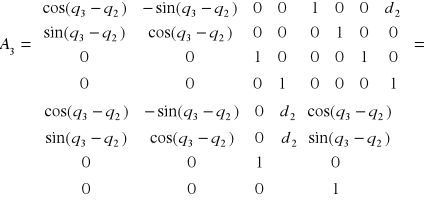
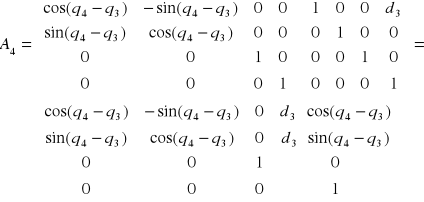
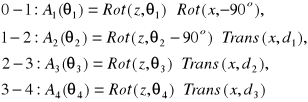
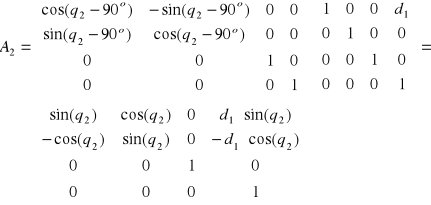
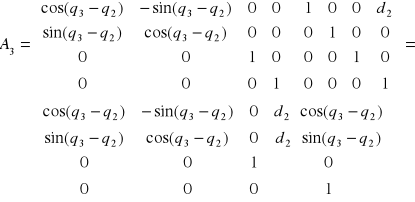
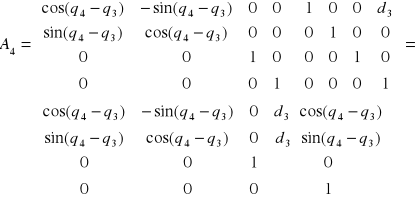
Wyznacznie kinematyki:
![]()

![]()
![]()
![]()
![]()

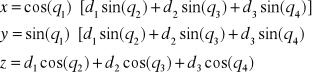
Z tak wyliczonej kinematyki można wyznaczyć współrzędne efektora robota w zależności od kątów oraz długości ramion robota
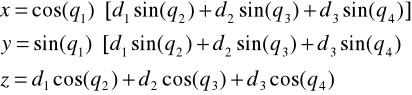
Ustawiając robota w dwóch pozycjach maksymalnego wychylenia ramion- poprzez wprowadzenie odpowiedniej konfiguracji możemy obliczyć długość poszczególnych ramion robota.
Wprowadzona konfiguracja:
![]()
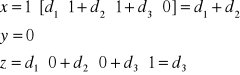
Po odczytaniu współrzędnych efektora:
![]()
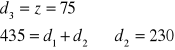
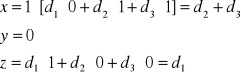
Podstawiając ustawienia konfiguracji do wzorów na współrzędne mamy:
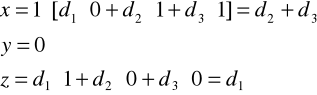
Stąd otrzymujemy wartość ![]()
Po wprowadzeniu innej konfiguracji:
![]()
![]()
Po podstawieniu do wzorów mamy:
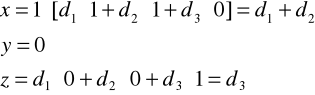
Stąd:
Szukane długości ramion wynoszą:

Wnioski:
Celem ćwiczenie było wyliczenie parametrów robota ROMIK, obliczenie długości poszczególnych ramion robota. Do tego celu wprowadzaliśmy odpowiednie konfiguracje robota dla różnych położeń ramion. Po odczytaniu współrzędnych z menu programu oraz podstawieniu ich do wzorów z wyliczonej kinematyki otrzymaliśmy długości ramion robota. Wynoszą one kolejno ![]()


Wyszukiwarka
Podobne podstrony:
Sprawko romik, Automatyka i robotyka air pwr, V SEMESTR, robotyka, Robotyka, Nowy folder, robotyka g
ROMIK, Automatyka i robotyka air pwr, V SEMESTR, robotyka, Robotyka, Nowy folder
sprawko interpolacja, Automatyka i robotyka air pwr, V SEMESTR, robotyka, Robotyka, Nowy folder
thev, Automatyka i robotyka air pwr, I SEMESTR
PR-02, Automatyka i robotyka air pwr, V SEMESTR, robotyka, Robotyka, Nowy folder, sprawozdanie
IRB-6, Automatyka i robotyka air pwr, V SEMESTR, robotyka, Robotyka, Nowy folder
irb-adaptacyjne, Automatyka i robotyka air pwr, V SEMESTR, robotyka, Robotyka, Nowy folder, sprawozd
Robociki, Automatyka i robotyka air pwr, V SEMESTR, robotyka, Robotyka
sprawozdanie cw 1, Automatyka i robotyka air pwr, V SEMESTR, robotyka, Robotyka, Nowy folder
ELEKTROTECHNIKA- ściąga, Automatyka i robotyka air pwr, I SEMESTR, elektrotechnika
PLAN ZAJĘĆ, Automatyka i robotyka air pwr, I SEMESTR
Robuter, Automatyka i robotyka air pwr, V SEMESTR, robotyka, Robotyka, Nowy folder
analiza-wzory, Automatyka i robotyka air pwr, I SEMESTR
OBWODY2sciaga, Automatyka i robotyka air pwr, V SEMESTR, Obwody el. i magn, egzaminy
OBWODY2, Automatyka i robotyka air pwr, V SEMESTR, Obwody el. i magn, egzaminy
Pytania- Technologia Informacyjna, Automatyka i robotyka air pwr, I SEMESTR, Technologia informacyjn
więcej podobnych podstron