DTR
Spis treści
Opis projektu
Spis elementów
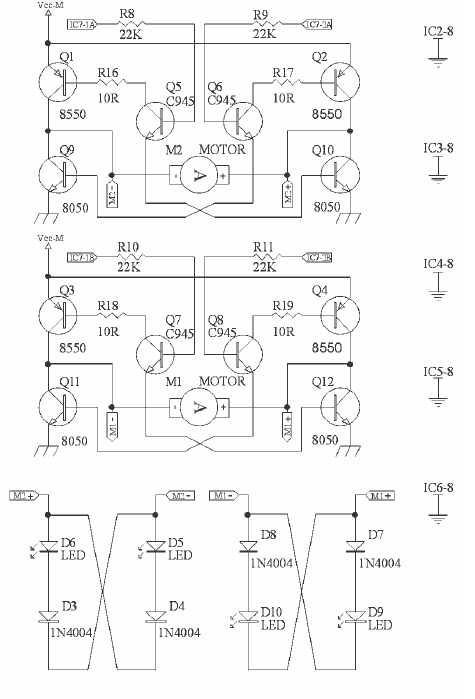
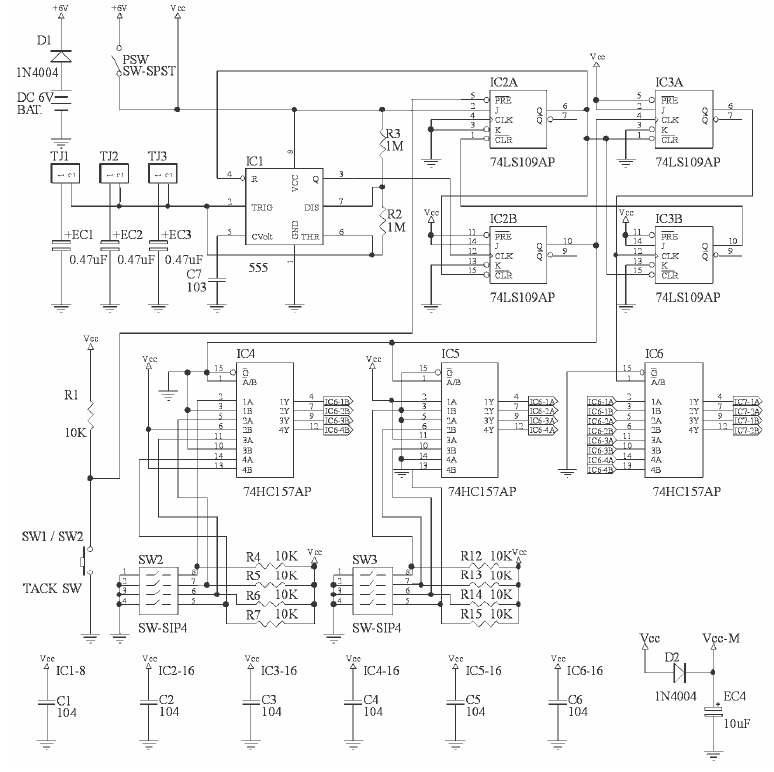
Schemat ideowy
Schemat monatżowy
Instrukcja obsługi
BHP
Opis projektu
Z wyglądu robot KSR5 przypomina skarabeusza poruszającego się na sześciu kółkach. Czujki, umieszczone na przodzie robota podłączone są do czujników dotyku. Kiedy KSR5 trafi na jakąś przeszkodę, wycofa się i uda się w innym kierunku.
Spis Elementów
Rezystory:
4x 10 (brązowy/czarny/czarny/złoty)
9x 10K (brązowy/czarny/pomarańczowy/złoty)
4x 22K (czerwony/czerwony/pomarańczowy/złoty)
2x 1M (brązowy/czarny/zielony/złoty)
Kondensatory ceramiczne:
1x typ 103
8x typ 104
Kondensatory elektrolityczne:
3x 0.47μ f
1x 10μ f
Diody LED 5mm:
2x czerwona
2x zielona
Oprawa diody LED (4x)
Przewody łączące (16x)
Dioda 1N4004 (6x)
Złącze pinowe (dwupinowe) (1x)
Damskie złącze (dwupinowe) (1x)
Złącze pinowe (dwupinowe) (11x)
Złącze zasilania głównego (1x)
Tranzystory:
4x 8050
4x 8550
4x C945
Układy scalone:
2x 74LS109AP
3x 74HC157AP
Mocowanie układów scalonych szesnasto pinowych (5x)
Układ scalony typu 555 (1x)
Mocowanie układu scalonego ośmio pinowego (1x)
Zworka (10x)
Złącze pinowe (4x)
Czujnik dotyku (2x)
Przewody zasilające silniki:
1x żółty
1x pomarańczowy
1x zielony
1x niebieski
Włącznik, wyłącznik
Kieszeń na baterie (1x)
Płytka drukowana (2x)
Silnik elektryczny (2x)
Elementy mechaniczne
Schemat ideowy
Schemat monatżowy
Instrukcja obsługi
Przesuń włącznik na pozycję „ON” - KSR5 będzie jechał w przód. Leżeli robot trafi na przeszkodę wycofa się i wykona dwu etapowy manewr zgodnie z ustawieniami użytkownika. Po wykonaniu określinego ruchu będzie kontynuował jazdę do przodu.
Za pomocą zworek możemy zaprogramować marewr według naszego upodobania. Poniższa tabela pokazuje jaki ruch wykona KSR5 przy odpowiednim ułożeniu zworek. A i B odpowiadają za ruch lewych kółek, C i D za ruch prawych.
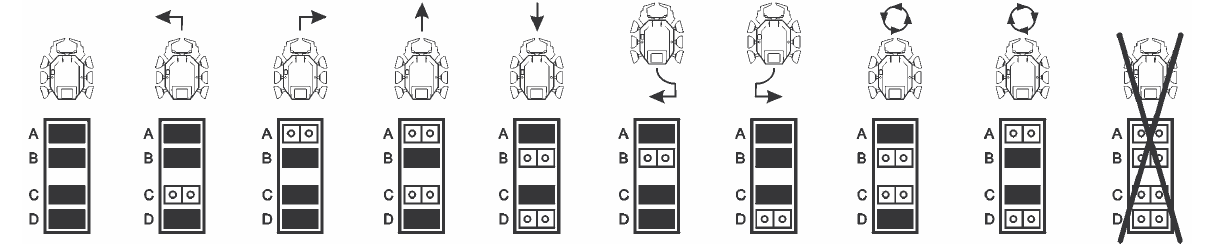
Ustawienia czasu też mogą być regulowane za pomocą zworek umieszczonych na TJ1, TJ2 oraz TJ3. Umieść zworkę na jednym z trzech miejsc TJ a ruch robota będzie wynosił około 1 sekundę. Umieść dwie a czas wyniesie 2 sekundy, przy trzech zworkach 3 sekundy.
BHP
Robot nie jest przeznaczony dla dzieci poniżej lat 10.
Urządzienie chronić przed wilgocią.
Nie pozostawiać włączonego urządzienia bez nadzoru.
Przekładnie zębate nie posiadają osłon, istnieje ryzyko urazu.
Zabrania się dokonywania jakich kolwiek modyfikacji obwodów elektrycznych (zwarcie może spowodować pożar).
Zużyte baterie należy wyrzucać do odpowiednich pojemników.
Wyszukiwarka
Podobne podstrony:
Mechatronika4
Mechatronika6
Wykład Mechatronika 01 05
DTR KWSOI 40
KGE 750F dtr
MTR 2009 Wstep do mechatr cz 3 (2)
Mechatronik Praktyczny 2013 styczen 1
IT3SCA a DTR
MO - sprawozdanie 2(1), Politechnika Poznańska, Mechatronika, SEMESTR I, Odlewnictwo
Zagadnienia egzaminacyjne z mechatroniki Irok, Mechatronika, Wprowadzenie do mechatroniiki
mechatronika - pytania, PW, PW-semestr IV, MECTR
Lista firm, elektronika, mechatronika i niewiadomo co
Projekt robota mobilnego szukającego wyjścia z labiryntu, MECHATRONIKA
odpowiedzi -zarządzanie, Studia - Mechatronika PWR, Podstawy zarządzania - wykład (Teresa Maszczak)
DTR.PR...01-Ex, Instrukcje, aplisens, dtr
Rodzaj i sposób obróbki, Mechatronika AGH IMIR, semestr 8, ZSW
Projekt Mechatronika?nczarek Brol
EZ 08 mechatronik
więcej podobnych podstron