FIZYKA CZĘŚĆ I
1. W ruchu krzywoliniowym punktu materialnego wektor przyspieszenia jest zawsze:
sumą składowych przyspieszeń normalnego i stycznego:
gdzie:
2. Do sił bezwładności zaliczamy na przykład:
siłę odśrodkową
Coriolis'a
inaczej siły pozorne
Siła bezwładności- siła pojawiająca się w nieinercjalnych układach odniesienia, będąca wynikiem przyspieszenia tego układu. Siła bezwładności dział przeciwnie do przyspieszenia układu inercjalnego.
3. Pracę definiujemy jako całkę:
4. Praca siły zachowawczej po krzywej zamkniętej jest:
równa 0
wynika to z definicji siły zachowawczej:
Siłę nazywamy zachowawczą, jeżeli całkowita praca wykonana przez tę siłę nad cząstką jest równa zeru gdy cząstka przebywa drogę po dowolnej krzywej zamkniętej wracając do punktu początkowego.
5. Okres drgań wahadła matematycznego jest:
niezależny od maksymalnego wychylenia dla niewielkich wychyleń wahadła
równy:
6. W zjawisku drgań harmonicznych tłumionych (w przypadku słabego tłumienia) amplituda kolejnych wychyleń jest następującą funkcją czasu:
A=A0e - kt
7. Drgania harmoniczne wymuszone zachodzą z częstością:
równą częstości siły zewnętrznej(wymuszającej)?
8. Natężenie pola grawitacyjnego wytworzonego przez układ mas wyznacza się korzystając z:
natężenie pola grawitacyjnego dla punktu materialnego:
natężenie pola grawitacyjnego dla układu mas:
9. Masa bryły sztywnej nie jest dobrą miarą jej bezwładności w ruchu obrotowym, gdyż:
nie uwzględnia odległości od punktu obrotu
moment bezwładności n punktów materialnych:
10. Efekty żyroskopowe są konsekwencją:
zasady zachowania momentu pędu
11. Zgodnie z prawem Bernoulli'ego, siła nośna działająca na skrzydło samolotu wynika:
z różnicy ciśnień działającej na płat p1<p2 spowodowanych różnymi prędkościami strumieni powietrza v1>v2
12. Szczególna teoria względności pokazuje, że gdy prędkość rozpędzanej cząstki (o niezerowej masie) zbliża się do prędkości światła, to jej energia kinetyczna:
Rośnie do nieskończoności wg wzoru:
gdzie:
![]()
13. Do pola elektrycznego E wprowadzono ładunek próbny Q. Mając do dyspozycji siłę działającą na ładunek próbny F oraz wielkość tego ładunku wyznaczysz wartość pola przy pomocy:
14. Wartość natężenia pola E wytworzonego przez trzy ładunki obliczamy:
Wg wzoru odpowiednio dla n=3:
15. Pomiędzy punktami A i B oddalonymi od siebie o odległość L rozpięte jest elektryczne pole jednorodne zaś różnica potencjałów pomiędzy punktami wynosi ΔV . Bezwzględna wartość natężenia tego pola wynosi:
E = ΔV / L
16. Mamy przewodnik w kształcie kuli o promieniu R na którym znajduje się stacjonarny ładunek Q. Słuszne jest następujące stwierdzenie:
Cały ładunek rozkłada się na powierzchni zewnętrznej kuli przewodnika, wewnątrz kuli E=0.
17. Polaryzacja dielektryka polega na:
Na utworzeniu dipoli elektrycznych lub orientacji już istniejących dipoli w reakcji na przyłożone pole elektryczne. W wyniku polaryzacji w dielektryku powstaje wewnętrzne pole elektryczne, które częściowo równoważy przyłożone zewnętrzne pole
18. Przewodnik o masie m naładowano ładunkiem Q w rezultacie czego jego potencjał zwiększył się o wartość ΔV . Pojemność elektryczną tego przewodnika definiuje się jako:
Pojemnością elektryczną odosobnionego przewodnika nazywamy wielkość fizyczną równą stosunkowi ładunku Q zgromadzonego na przewodniku do potencjału ΔV tego przewodnika.
C = Q/ΔV
19. Opór przewodnika o długości L, o powierzchni przekroju S i oporze właściwym ρ spełnia prawo Ohma. Jak zależy opór od podanych powyżej wielkości:
20. W mieszkaniu zakładamy instalację trzech gniazdek przeznaczonych dla urządzeń pracujących pod napięciem 220 V. Poprawna instalacja polega na następującym połączeniu gniazdek ze źródłem napięcia:
Połączenie równoległe gniazdek (zagwarantuje takie samo napięcie w każdym gniazdku)
21. Do pola magnetycznego wpada naładowana cząstka o ładunku Q równolegle do wektora indukcji B. Prędkość cząstki wynosi V. Cząstka porusza się:
ruchem jednostajnym prostoliniowym
22. Zamknięty obwód z przewodnika umieszczony został w polu magnetycznym o indukcji B. W obwodzie tym został wygenerowany prąd indukcyjny, który powstał w wyniku:
zmian pola magnetycznego lub ruchu przewodnika w kierunku innym niż równoległym do kierunku indukcji B
23. Istnienie pola E wytworzonego przez nieruchome ładunki opisane jest następującym równaniem Maxwella:
24. Światło spójne pada na dwie wąskie szczeliny i po przejściu przez nie dwa promienie świetlne spotykają się w tej samej fazie w punkcie równo oddalonym od szczelin. Jeśli natężenie światła zmierzone przy jednej zasłoniętej szczelinie wynosi I0 to przy dwóch odsłoniętych szczelinach wypadkowe natężenie I wynosi:
I = 4*I0 dlatego, że następuje wzmocnienie amplitudy fali do wartości 2*A a natężenie fali jest wprost proporcjonalne do kwadratu amplitudy: I~A^2
25. Kto podał poprawny opis promieniowania termicznego?
Poprawny opis promieniowania termiczniego podał Max Planck.
26. Prawo Stefana-Boltzmanna
Prawo Stefana-Boltzmanna opisuje całkowitą moc wypromieniowywaną przez ciało doskonale czarne w danej temperaturze.
Gdzie:
Φ - strumień energii wypromieniowywany w kierunku prostopadłym do powierzchni ciała [W / m2]
σ - stała Stefana-Boltzmanna
T - temperatura w skali Kelvina
27. Model Bohra dla atomu wodoru
Elektron może poruszać się tylko po pewnych dozwolonych orbitach, znajdować się tylko w
ściśle określonych stacjonarnych stanach energetycznych, jego całkowita energia pozostaje
stała, Promieniowanie elektromagnetyczne zostaje wysłane tylko wtedy gdy elektron
poruszający się po orbicie o całkowitej energii Ej zmienia swoj ruch skokowo.
28. W zjawisku fotoelektrycznym
Elektrony są wyrzucane z powierzchni ciała stałego pod wpływem padającego
promieniowania.
29. Energią progową na kreację pary elektron-pozyton wynosi:
E= mec2+ mpc2=2mec2
me - masa elektronu
mp - masa pozytonu
30. W stanie równowagi cieplnej dwóch układów
W rownowadze cieplnej dwoch układow mają one tę samą temperaturę, nie następuje
wymiana ciepła, stan makroskopowy nie zależy od czasu, stan się nie zmienia.
31. Zerowa zasada termodynamiki pozwala na
Zerowa zasada termodynamiki pozwala na pomiar temperatury z użyciem termometru.
32. Równoważność ciepła i pracy jako form przekazywania energii wynika z
Rownoważność ciepła i pracy wynika z pierwszej zasady termodynamiki.
33. Dla małych przekazów ciepła przyrost entropii można obliczyć jako
Dla małych zmian Q przyrost entropii można wyliczyć jako:
34. Wykresem adiabaty we współrzędnych (p, V) jest
Wykresem adiabaty jest krzywa potęgowa o wykładniku κ :
35. Sprawność dowolnego silnika pracującego między zbiornikiem ciepła o temperaturze T1 i chłodnicą o temperaturze T2 jest
Sprawność silnika Carnota :
, sprawność dowolnego silnika jest
zawsze mniejsza od sprawności silnika Carnota.
36. Temperatura ciała doskonale czarnego wzrosła 2-krotnie. Spowodowało to, że jego moc promieniowania:
wzrosła 16 razy co wynika ze wzoru:
(2^4=16)
37. Według prawa przesunięć Wiena maksimum mocy promieniowania ze wzrostem temperatury:
przesuwa się w stronę fal krótszych wg zależności:
gdzie:
- długość fali o maksymalnej mocy promieniowania mierzona w metrach
- temperatura ciała doskonale czarnego mierzona w kelwinach,
- stała Wiena
38. Napięcie hamujące w efekcie fotoelektrycznym:
jest to takie napięcie, przy którym natężenie prądu fotoelektrycznego spada do zera
zależy liniowo od częstotliwości padającego światła
39. Napięcie hamujące w efekcie fotoelektrycznym:
jest to takie napięcie, przy którym natężenie prądu fotoelektrycznego spada do zera
zależy liniowo od częstotliwości padającego światła
40. Widmo atomowe wodoru jest:
Liniowe
41. Który z wymienionych postulatów jest sprzeczny z modelem atomu Bohra:
Postulaty Bohra:
Orbitalny moment pędu elektronu jest skwantowany. Może on przybierać dyskretne wartości
gdzie n = 1,2,3...,
- stała Plancka podzielona przez 2π.
Podczas zmiany orbity, której towarzyszy zmiana energii elektronu, atom emituje foton. Energia fotonu równa jest różnicy między energiami elektronu na tych orbitach
gdzie
E2 i E1 - energie elektronu, odpowiednio, końcowa i początkowa,
h - stała Plancka,
ν - częstotliwość fotonu.
42. Według modelu atomu Bohra prędkość elektronu orbitalnego:
Wynosi:
43. Które z poniższych twierdzeń jest prawidłowe?
Wtf
44. Magneton Bohra jest wartością:
momentu magnetycznego elektronu znajdującego się na orbicie Bohra
Zdefiniowany jest jako:
gdzie:
e jest ładunkiem elementarnym,
(h kreślone) jest stałą Plancka, podzieloną przez 2π,
me jest spoczynkową masą elektronu.
W układzie SI jego wartość wynosi w przybliżeniu:
μB = 9,274 400 949 (80) · 10-24 J·T -1
45. W pojeździe kosmicznym krążącym wokół Ziemi
Rownoważy się siła przyciągania Ziemi i siła odśrodkowa.
46. W polu elektrostatycznym
Na ładunek działa siła.
47. Potencjał elektryczny dodatniego ładunku punktowego
wynosi:
48. Pojemność elektryczna jest cechą
układów elektrycznych gromadzących ładunek w postaci różnicy potencjałów w tym i kondensatorów
C = q/V
49. W oparciu o zjawisko indukcji elektromagnetycznej działają
prądnice, alternatory, generatory w elektrowniach, transformatory, piece indukcyjne, silniki indukcyjne i mierniki indukcyjne, cewki, głowic elektromagnetyczne
50. W prawie Ampera, uogólnionym przez Maxwella, zawarta jest informacja, że
źródłem pola magnetycznego oprócz prądu jest także zmiana pola elektrycznego.
51. Strumień wektora natężenia pola elektrycznego liczony przez zamkniętą powierzchnię
Strumień wektora natężenia pola el. prznikający pow. zamkniętą jest rowny stosunkowi
całkowitego ładunku znajdującego się wewnątrz tej powierzchni do wartości przenikalności
elektrycznej ośrodka.
52. Warunkiem koniecznym skroplenia gazu jest
Należy obniżyć temperaturę tego gazu poniżej jego temperatury krytycznej.
53. W modelu gazu doskonałego pomijamy:
W modelu gazu doskonałego pomijamy objętość cząsteczek(rozmiar), drgania oraz
oddziaływania międzycząsteczkowe(przyciąganie)
54. W przemianie adiabatycznej ze wzrostem objętości gazu jego temperatura
W przemianie adiabatycznej ze wzrostem objętości jego temperatura maleje.
55. Energia wewnętrzna jednego mola gazu doskonałego
Energia wewnętrzna 1 mola gazu doskonałego: pozostaje stała, jeśli nie zmienia się
temperatura. Zależy tylko od temperatury, nie zależy od rodzaju gazu.
56. W przemianie izobarycznej gazu doskonałego dla temperatury zmierzającej do zera bezwzględnego
W przemianie izobarycznej, gdy T zmierza do 0 K, objętość także zmierza do zera.
57. Energia wewnętrzna układu zależy od
Energia wewnętrzna układu zależy tylko od energii kinetycznej cząsteczek, zatem zależy
tylko od temperatury (gaz doskonały)
58. Silnik termodynamiczny może zamienić ciepło na pracę jeśli
Silnik może przekształcać ciepło na pracę, jeśli pracuje w obiegu zamkniętym, oraz pracuje
między źrodłem o temperaturze wyższej, a źrodłem o temperaturze niższej.
59. Przepływ ciepła z ciała o temperaturze niższej do ciała o temperaturze wyższej
Przepływ ciepła od ciała o temperaturze niższej do ciała o temperaturze wyższej jest
niemożliwy.
Brakowalo odpowiedzi na pytania: 16, 25,27,28,45,46, 30-35, 51-59
MECHANIKA II
1. Jaki układ nazywamy środkowym układem sił?
Środkowy układ sił (płaski i przestrzenny) - układ, w którym proste działania sił przecinają się w jednym punkcie.Taki układ sił można zastąpić jedna siłą (wypadkową tego układu), albo sprowadzić do dwójki zerowej (układ sił jest wtedy w równowadze).
2. Definicja wypadkowej układu sił.
Wypadkowa - jest to układ równoważny zlożony tylko z jednej siły, który zastępuje dany układ sił.
Na ciało może działać jednocześnie więcej niż jedna siła. W takiej sytuacji wpływy od wszystkich sił - składników dokładają się do siebie i w efekcie otrzymujemy pewien efekt sumaryczny ich działania. Ten efekt połączonych sił ze sobą jest jakby nową siłą zastępczą i nazywany jest siłą wypadkową. Siła ta zastępuje działanie wszystkich sił na raz. Matematycznie obliczenie siły wypadkowej polega na zsumowaniu wektorów sił składowych
3. Twierdzenie o trzech siłach.
Rozpatrzmy przypadek, kiedy dany układ trzech sił nierównoległch, działających w jednej płaszczyźnie, przyłożony jest do bryły sztywnej w punktach 1,2,3 (rys. 4.1). Dwie siły P1 i P2 zastępujemy jedną siłą S=P1+P2 i pytamy, przy jakich warunkach siła P3 tworzy dwójkę zerową z siłą S. Pierwszym warunkiem jest to, aby siła P3 działała wzdłuż prostej działania siły S, czyli jej prosta działania musi przechodzić przez punkt A. Drugim warunkiem jest, aby miała tę samą wartoŚć i przeciwny zwrot. Ten drugi warunek przedstawiono na rysunku graficznie, to znaczy trójkąt sił P1, P2, P3 musi być zamknięty.
Opierając się na analizie tego układu sił (Środkowy) można wykazać następujące twierdzenie:
Trzy siły są w równowadze, jeżeli ich proste działania przecinają się w jednym punkcie, leżą w jednej płaszczyźnie i trójkąt sił jest trójkątem zamkniętym.
4. Trzecia zasada dynamiki.
Jeśli ciało A działa na ciało B pewną siłą, to ciało B działa na ciało A siłą o takiej samej wartości oraz kierunku, lecz o przeciwnym zwrocie.
5. Definicja momentu siły względem bieguna.
Momentem siły względem punktu (bieguna) nazywamy wektor Mo(P)taki, że:
Wektor momentu jest prostopadły do płaszczyzny wyznaczonej przez prostą działania siły i punkt.
Wartość wektora momentu jest równa:
Mo(P)=P*d
Odległosć d jest odległoscią prostej działania siły od punktu i nazywana jest ramieniem siły.
Zwrot wektora momentu jest taki, aby patrząc od jego strzałki na płaszcyznę wyznaczoną przez siłę i punkt, widać było obrót siły względem punktu w kierunku przeciwnym do ruchu wskazówek zegara czyli inaczej, aby trójka wektorów zaznaczonych na rysunku była prawoskrętna.
Moment siły względem bieguna jest zerem, gdy prosta działania siły przechodzi przez ten biegun.
Z definicji momentu siły względem bieguna wynika, że moment nie zmieni się, jeżeli siłę przesuniemy wzdłuż prostej działania.
6. Definicja momentu siły względem osi.
Momentem Siły Względem Osi - nazywamy moment rzutu tej siły na płaszczyznę prostopadłą do osi względem punktu przebicia osi i płaszczyzny.
Moment Siły Względem Osi Jest Wektorem O Następujących Cechach:
1. Wartość Fπ . r.
2. Kierunek zgodny z kierunkiem osi.
3. Zwrot zgodny z regułą śruby prawoskrętnej.
Jeżeli zwrot momentu jest zgodny ze zwrotem osi to moment uważamy za dodatni, a gdy przeciwny - za ujemny.
Moment Siły Względem Osi Jest Równy Zero:
1. Fπ = 0 - Siła jest równoległa do osi l
2. r = 0 - Linia działania siły przecina oś.
Moment siły względem osi będzie równy zero wtedy, gdy siła i oś leżą w jednej płaszczyźnie.λ
Moment siły względem osi jest równy rzutowi wektora momentu siły na tę prostą. Współrzędne Mx, My i Mz wektora M0 nazywają się momentami siły względem odpowiednich osi x, y i z.
7. Warunki równowagi płaskiego dowolnego układu sił.
Dowolny płaski układ sił jest w równowadze wtedy, gdy suma rzutów wszystkich sił tego układu na osie "x" i "y" i suma momentów wszystkich sił wzgledem dowolnego punktu są równe zero.
ΣFix = 0; ΣFiy = 0; ΣMa = 0; |
8. Warunki równowagi przestrzennego dowolnego układu sił.
Przestrzenny układ sił jest w równowadze, jeżeli sumy rzutów wszystkich sił na trzy osie układu równe są zeru i sumy momentów wszystkich sił względem trzech osi układu są równe zeru.
9. Wskaż poprawną postać równania ruchu jednostajnie przyspieszonego.
Ruch jednostajnie przyspieszony - ruch, w którym prędkość ciała zwiększa się o jednakową wartość w jednakowych odstępach czasu. Ciało takie ma przyspieszenie o stałej wartości, a jego kierunek i zwrot są równe kierunkowi i zwrotowi prędkości tego ciała.
Droga, a także wartość przesunięcia, wynosi w tym ruchu
gdzie:
s - droga, pokonana przez ciało
s0 - droga początkowa ciała
v - wartość prędkości ciała
v0 - wartość prędkości początkowej ciała
t - czas trwania ruchu jednostajnie przyspieszonego
a - wartość przyspieszenia.
Równanie ruchu przedstawia się następująco:
, gdzie:
x(t) - odległość przebyta od początku układu odniesienia
x0 - odległość miejsca rozpoczęcia ruchu od początku układu odniesienia
10.Od czego zależy składowa styczna prędkości punktu w ruchu obrotowym po okręgu?
V = 2*pi*r / T
prędkość w ruchu po okręgu jest styczna do okręgu, a jego wartość zależy od drogi przebytej przez punkt materialny, w stosunku do czasu. Drogę możemy zastąpić równianiem obwodu okręgu, a czas okresem ruchu i otrzymujemy zależność prędkości od promienia okręgu r i jego okresu T.
11. Od czego zależy składowa normalna prędkości punktu w ruchu obrotowym po okręgu?
Od niczego. Składowa ta zawsze wynosi zero - jeśli chodzi o normalną do kierunku ruchu, a więc tak jak normalnie się to przyjmuję.
12. Co nazywamy chwilowym środkiem obrotu?
Chwilowym środkiem obrotu nazywamy taki punkt względem którego ciało jest obracane. W ogólności można przyjąć, że każde przesunięcie figury płaskiej na jej płaszczyźnie można zrealizować poprzez obrót względem pewnego punktu (dla przesunięcie równoległego punkt ten znajdzie się w nieskończoności).
13. Przyspieszenie Coriolisa.
Przykład: Na obrotowej tarczy promieniście porusza się obiekt, prędkość styczna tarczy zmienia swoją wartość przez co mamy zmiany prędkości
14. Pierwsza zasada dynamiki.
Jeżeli na ciało nie działa żadna siła, lub działające siły równoważą się to ciało porusza się ruchem jednostajnym prostoliniowym lub pozostaje w spoczynku. (V= const, Fw=0)
Istnieje układ odniesienia zwany inercjalnym w którym ciało nie podlegające oddziaływaniom sił zewnętrznych spoczywa lub porusza się po prostej ze stałą prędkością.
Lub inne definicje.
15. Moment statyczny figury płaskiej.
Iloczyn pola powierzchni figury i odległości jej środka ciężkości od obranej osi względem której liczymy moment.
lub
16. Moment bezwładności figury płaskiej.
Ix - moment bezwładności względem osi x,
Iy - oment bezwładności względem osi y,
IO - biegunowy moment bezwładności względem punktu O,
Dxy (Ixy) - moment dewiacji,
17. Moment bezwładności bryły sztywnej.
Im moment większy tym trudnej zmienić wartość prędkości kątowej ciała (bryły).
17.1 Tutaj muszę dodać, że pytanie o moment bezwładności bryły sztywnej było takie: od czego ZALEZY moment bezwładności - a)od masy i rozmieszczenia b) od masy c… = Mieliśmy taki test na seminarium
18. Twierdzenie Steinera.
Moment bezwładności pola A figury płaskiej względem prostej równa się momentowi bezwładności tej figury względem prostej do niej równoległej i przechodzącej przez środek ciężkości pola, plus iloczynowi pola A figury i kwadratu odległości obu prostych.
Wzory Steinera:
19. Współczynnik tarcia tocznego.
Na skutek toczenia się ciała siłą reakcji podłoża odchyla się od pionu.(odchyla się bo koło się ugina. Nie jest sztywne) Jej składowa pionowa równoważy siłę ciężkości ciała, a składowa pozioma siłę pociągową. Składowa pozioma jest siłą tarcia tocznego.
Dla tarcia tocznego współczynnik tarcia jest równy stosunkowi momentu tarcia tocznego Mt do siły nacisku N. Współczynnik ten ma wymiar wyrażany w jednostkach długości (np. mm).
20. Druga zasada dynamiki.
Jeżeli na ciało działa niezrównoważona siła, to ciało porusza się z przyspieszeniem proporcjonalnym do wartości tej siły i odwrotnie proporcjonalnym do masy ciał.
.
21. Definicja pędu.
Pęd punktu materialnego jest równy iloczynowi masy m i prędkości v punktu. Pęd jest wielkością wektorową; kierunek i zwrot pędu jest zgodny z kierunkiem i zwrotem prędkości.
22. Definicja krętu.
W tradycyjnej matematyce moment pędu jest wielkością wektorową (pseudo wektor). Moment pędu punktu materialnego względem zadanego punktu określony jest zależnością składowych:
gdzie:
- moment pędu punktu materialnego,
- wektor łączący punkt, względem którego określa się moment pędu i punkt ciała,
- pęd punktu materialnego,
x - iloczyn wektorowy wektorów.
23. Zasada zachowania pędu.
Jeżeli energia układu pozostaje bez zmian to pęd się nie zmienia.
Pęd zmienia się w wyniku działania na ciało siły przez pewien czas. Iloczyn siły i czasu jej działania nazywany jest popędem siły (I)
Jeżeli w układzie inercjalnym na ciało (układ ciał) nie działa siła zewnętrzna, lub działające siły zewnętrzne równoważą się:
to całkowity pęd ciała (układu ciał) nie zmienia się:
Powyższe zdanie stanowi treść zasady zachowania pędu. Zasada zachowania pędu jest konsekwencją symetrii translacji w przestrzeni (twierdzenie Noether)
Jeżeli energia potencjalna jest niezmiennicza ze względu na translację,
to
czyli na ciało nie działa żadna siła i w konsekwencji pęd układu jest zachowany.
24. Zasada zachowania krętu.
Zasada zachowania momentu pędu wynika z niezmienności hamiltonianu względem obrotów w przestrzeni.
Zasada ta również mówi, że prędkość zmiany momentu pędu układu jest równa sumie momentów sił zewnętrznych działających na punkty układu.
Więcej wyjaśnień http://pl.wikipedia.org/wiki/Zasada_zachowania_momentu_p%C4%99du
25. Energia kinetyczna w ruchu obrotowym.
Ek - energia kinetyczna,
I - moment bezwładności ciała,
ω - prędkość kątowa ciała,
2 - liczba (dwukrotność jedynki),
26. Energia kinetyczna w ruchu płaskim.
Ek - energia kinetyczna,
m - masa ciała,
v - prędkość ciała,
2 - liczba (dwukrotność jedynki),
27. Energia potencjalna.
Energia potencjalna - energia jaką ma układ ciał umieszczony w polu sił zachowawczych, wynikająca z rozmieszczenia tych ciał. Równa jest pracy, jaką trzeba wykonać, aby uzyskać daną konfigurację ciał, wychodząc od innego rozmieszczenia, dla którego umownie przyjmuje się jej wartość równą zero.
dla sprężyny
28. Jaka zasada jest zachowana w przypadku zderzenia sprężystego?
Zasada zachowania pędu, zasada zachowania energii.
29. Współczynnik restytucji.
Współczynnik restytucji określa nam jaka część pędu jest tracona podczas uderzenia.
S” = k S'
S', S” - impuls siły R w I i II fazie uderzenia
k - współczynnik restytucji, k
< 0;1 >. Wartość współczynnika restytucji zależy od materiału z którego wykonane są kule. Mogą wystąpić dwa przypadki graniczne: uderzenie idealnie sprężyste k = 1 (S” = S'); uderzenie idealnie plastyczne k = 0 (S” = 0) .
30. Zasada równoważności energii i pracy.
Przyrost energii kinetycznej punktu materialnego (ciała) równy jest pracy wykonanej przez siły działającej na ciało.
31. Zasada zachowania energii mechanicznej.
Potencjalne pole sił ( polu sił zachowawczych )
Praca wykonana przez siły w potencjalnym polu sił nie zależą od drogi po której wykonane zostało przemieszczenie a jedynie od położeń początkowego i końcowego. Energia mechaniczna ciała w potencjalnym polu sił pozostaje wielkością stałą.
Emechaniczna = Epotencjalna + Ekinetyczna
Epotencjalna + Ekinetyczna = const
32. Siła sprężystości odkształconej sprężyny.
Fs - siła sprężystości odkształconej sprężyny,
k - stała sprężyny,
x - odkształcenie sprężyny,
33. Równanie ruchu drgającego bez tłumienia.
34. Równanie ruchu drgającego z tłumieniem.
w powyższym równaniu amplitudą jest:
Jak widać amplituda zależy od czasu, co bardzo dobrze widać na wykresie, na którym funkcja
stanowi obwiednię wykresu.
35. Okres drgań wahadła matematycznego.
T - okres drgań wahadła,
l - długość nierozciągliwej i nieważkiej nici,
g - przyspieszenie ziemskie,
π - grecka litera, często spotykana w mechanice jak i w matematyce, oznacza ile razy średnica mieści się na obwodzie koła π = 3.14..., często występuje w języku polskim „πerdole nie robię”.
2 - definicja w pytaniu nr 25.
TMM
Ile stopni swobody posiadają człony tworzące pary kinematyczne klasy 4?
2
Ile stopni swobody posiadają człony tworzące pary kinematyczne klasy 5?
1
Przegub kulisty to para kinematyczna której klasy ?
3
Jaki łańcuch kinematyczny nazywamy otwartym ?
Łańcuch kinematyczny otwarty to łańcuch, w którym tylko jeden z
członów zewnętrznych jest połączony ruchowo z podstawą (ostoją).
Jaki łańcuch kinematyczny nazywamy zamkniętym ?
Łańcuch kinematyczny zamknięty to łańcuch, w którym co najmniej dwa człony zewnętrzne
są połączone ruchowo z podstawą.
Wzór na ruchliwość teoretyczną mechanizmu płaskiego ma postać:
Wzór na ruchliwość teoretyczną mechanizmu przestrzennego ma postać:
Ruchliwość lokalna
Ruchliwość lokalna w mechanizmach - występuje wówczas, kiedy mechanizm
posiada człony kinematycznie zbędne - mówimy wtedy o lokalnych
stopniach swobody.
Ile napędów należy zastosować dla mechanizmu o ruchliwości rzeczywistej w=3?
3
Który z warunków musi spełniać schemat poprawny zastępczy mechanizmu?
Ruch jaki wykonuje łącznik mechanizmu korbowo-suwakowego to:
Ruch płaski
Ruch jaki wykonuje łącznik mechanizmu równoległoboku (szczególny przypadek czworoboku przegubowego) to ruch:
Ruch postępowy
Które z parametrów kinematycznych i geometrycznych należy znać, aby obliczyć przyspieszenie normalne punktu należącego do członu mechanizmu?
Odległość między punktem a środkiem obrotu i prędkość kątową członu.
Wzór na wartość przyspieszenia normalne punktu należącego do członu mechanizmu ma postać:
W przypadku jakich mechanizmów można mówić o ruchu złożonym członów?
Korbowo suwakowych.
W jakich wymienionych mechanizmach występuje przyspieszenie Coriolisa?
najogolniej: w mechanizmach złożonych, w ktorych ruch unoszenia jest ruchem obrotowym a ruch względny jest ruchem postępowym; warunki jakie muszą być spełnione: ωu ≠0 i vw ≠0 oraz wektor vw nie może być rownoległy do wektora ωu
Wzór na przyspieszenie Coriolisa dla punktu należącego do członu wykonującego ruch złożony:
Wskazać kolejne kroki analizy kinematycznej metodą grafo-analityczną.
Kolejność postępowania w metodzie planów prędkości i przyspieszeń:
- należy narysować mechanizm w podziałce kl w położeniu przewidzianym do analizy
kinematycznej,
- określić ruchliwość i klasę mechanizmu,
- wskazać człon lub człony napędzające,
- oznaczyć cyframi człony mechanizmu, od członu napędzającego poczynając,
- oznaczyć dużymi literami istotne punkty mechanizmu,
- określić parametry kinematyczne członu napędzającego,
- napisać równania wektorowe określające relacje pomiędzy prędkościami punktów
mechanizmu,
- rozwiązać wykreślnie równania wektorowe rysując w podziałce kv odpowiednie
wieloboki wektorowe na tzw. planie prędkości wychodząc z jednego punktu
biegunowego,
- analogiczne rozwiązać zadanie dotyczące przyspieszeń korzystając z wartości
wyznaczonych na podstawie planu prędkości i narysować w podziałce ka.
Wskazać kolejne kroki analizy kinematycznej metodą analityczną.
1. przedstawić mechanizm w postaci zamkniętego wieloboku wektorowego
2. przyjąć do obliczeń 2n-2 parametrow mechanizmu (parametry te muszą być znane i należy je
przyjąć jako dane w momencie definiowania mechanizmu)
3. zrzutować wielobok na osie płaskiego układu wspołrzędnych (x,y) → otrzymujemy 2 rownania
skalarne (układ rownań)
4. na podstawie ww. układu rownań można wyznaczyć 2 szukane parametry geometryczne np. 2
długości, długość i kąt lub 2 kąty
5. zrożniczkować ww. rownania względem czasu → otrzymujemy 2 rownania (układ rownań)
6. na podstawie powstałego układu rownań wyznaczyć 2 szukane prędkości liniowe lub kątowe
7. zrożniczkować rownania z punktu 5. względem czasu → otrzymujemy 2 rownania (układ
rownań)
8. wyznaczyć 2 szukane przyspieszenia liniowe lub kątowe
Czym się różni przekładni obiegowa od przekładni zwykłej?
Osie geometryczne kół przekładni obiegowej są ruchome względem podstawy.
Podziałka zazębienia jest to:
Łukowa odległość punktów przecięcia prawych lub lewych powierzchni dwóch sąsiednich zębów ze średnicą podziałową.
Moduł zazębienia jest to:
Moduł "m" to odległość między punktami przecięcia sąsiednich zębów ze średnicą podziałową koła podzielona przez π.
Przełożenie kierunkowe jest to.
przełożenie kierunkowe jest to iloraz prędkości kątowej członu czynnego (napędzającego) „a” i biernego (napędzanego) „b” przy unieruchomionym członie
Przełożenie kierunkowe jest dodatnie gdy:
Przełożenie kierunkowe iab przyjmujemy za dodatnie iab > 0 , jeżeli
zwroty prędkości kątowych tych członów są zgodne. Jest to przekładnia
o zazębieniu wewnętrznym.
Jaki ruch wykonuje satelita przekładni obiegowej?
Ruch płaski.
Wzór Willisa ma postać:
Jaka jest zasadnicza różnica pomiędzy przekładnią falową i typową przekładnią obiegową?
Członem wyjściowym elastyczny pierścień zębaty (w zwykłej przekładni
obiegowej jest to satelita.
Ile stopni swobody posiada przekładnia nazwana dyferencjałem?
2
Ile dyferencjałów posiada samochód z napędem na tylne koła, a ile na przednie?
Tylne 1 przednie też 1.
Jaki mechanizm umożliwia prawidłowy ruch samochodu po łuku drogi bez poślizgu kół?
Stożkowa przekładnia różnicowa.
Zasada d”Alemberta dla członu mechanizmu płaskiego ma postać:
Zasada d.Alemberta. W czasie ruchu dowolnego członu mechanizmu siły
zewnętrzne działające na ten człon równoważą się z odpowiednimi siłami
reakcji w parach kinematycznych oraz siłami bezwładności.
Wzór na siłę bezwładności ma postać:
Wzór na moment od sił bezwładności ma postać:
Czym różni się siła czynna od siły biernej?
Siła czynna działa z zewnątrz na ciało, siła bierna to siła reakcji lub siła wewnętrzna ciała.
Ile niewiadomych otrzymujemy uwalniając od więzów człony tworzące parę kinematyczną klasy 5 w ogólnym przypadku?
2
RESZTY BRAK
WYTRZYMAŁOSĆ MATERIAŁÓW
1. Czego dotyczy zasada zesztywnienia? ok
Przemieszczenia punktów konstrukcji są małe w porównaniu z jej charakterystycznymi wymiarami (np. mniejsze od 1/250 długości belki, ¼ grubości płyty itp.)
Zasada zesztywnienia : wpływ przemieszczeń konstrukcji na wartość sił biernych (reakcji podpór) i sił wewnętrznych ( przekrojowych) jest pomijalnie mały. Oznacza to, że przy obliczaniu tych sił nie rozróżniamy konfiguracji aktualnej od wyjściowej.
2. Które równanie opisuje linię odkształconej osi belki zginanej w płaszczyźnie x, y? ok
Oś ugiętą określa równanie y=f(x) a jej krzywiznę wyraża wzór
Krzywiznę dowolnej krzywej płaskiej y=f(x) przedstawia znane z geometrii różniczkowej równanie
Porównując powyższe zależności, otrzymujemy
Jest to równanie osi ugiętej w postaci różniczkowej. W praktyce technicznej na skutek dużej sztywności belek och odkształcenia są małe, a promienie krzywizny osi ugiętej bardzo duże. Oznacz to, że przemieszczenia liniowe i kątowe są również małe. Jeżeli przemieszczenia kątowe są małe
to (y')2<<1 - dlatego można przyjąć, że
. Po uwzględnieniu powyższych uwag i wykorzystaniu zasady znakowania momentów, Równanie przyjmuje postać
W wyniku dwukrotnego całkowania równania różniczkowego osi ugiętej otrzymuje się w równaniu osi ugiętej dwie stałe. Stałe te wyznacza się z warunków brzegowych. Są one uzależnione od rodzaju podpór i ogólnego warunku ciągłości osi ugiętej.
3. Które składowe określają płaski stan naprężenia? Ok
Składowymi określającymi płaski stan naprężenia są
4. Iloczynem których składowych jest energia sprężysta odkształcenia postaciowego. ??
Wzór na energię sprężystą odkształcenia postaciowego w trójosiowym stanie naprężeń
5. Funkcją jakich parametrów jest wytężenie materiału? Ok
Funkcję wytężenia materiału wyraża się prze naprężenia główne i stałe materiałowe w ogólnej postaci
6. Jakie własności mają główne osie bezwładności? Inne pytanie (Główne osie bezwładności to osie względem których: takie było)
Każdy układ materialny (w przestrzeni) w każdym punkcie posiada co najmniej trzy główne osie bezwładność:
Dokładnie trzy, gdy wartości własne
Jedną główną oś i całą płaszczyznę osi bezwładności prostopadłych do tej osi, gdy
lub
lub
Całą przestrzeń głównych osi bezwładności, gdy
(każde trzy osie przechodzące przez dany punkt i wzajemnie prostopadłe, tworzą układ osi głównych)
Momenty bezwładności liczone względem głównych osi bezwładności są ekstremalne.
Momenty dewiacji liczone względem płaszczyzn wyznaczonych przez główne osie bezwładności są równe zeru.
Momenty dewiacji osiągają największe bezwzględne wartości względem osi.
7. Czemu jest równy wskaźnik wytrzymałości przekroju pierścieniowego na skręcanie?
Gdzie:
W0 - wskaźnik wytrzymałości na skręcanie
I0 - biegunowy moment bezwładności
dZ - średnia zewnętrzna przekroju pierścieniowego
8. Z której hipotezy należy korzystać przy obliczaniu naprężeń zastępczych dla przypadku rozciągania ze zginaniem. ??
Jeżeli naprężenia w rozpatrywanym przekroju są wynikiem działania wielu rodzajów obciążeń, to:
- gdy naprężenia są tego samego rodzaju (wszystkie naprężenia normalne lub styczne), to naprężenie zastępcze jest sumą algebraiczną tych naprężeń,
- gdy naprężenia są różnego rodzaju, to naprężenie zastępcze wyznaczamy, korzystając z którejś hipotezy wytrzymałościowej.
czyli tak.. do zginania i rozciągania mamy bez hipotezy
suma algebraiczna
9. W przypadku złożonego stanu naprężenia, warunek wytrzymałościowy (bezpieczeństwa) ograniczony w stosunku do:
Może to być, że ograniczmy do jakiegoś współczynnik a dla najgorszego przypadku, czyli chyba do zginania. Jeżeli mamy złożone naprężenia to przyrównujemy współczynnik tak, jakby było samo zginanie (po uwzględnieniu hipotezy)
10. Która z konstrukcji koła Mohra opisuje czyste ścinanie w płaskim stanie naprężenia? ok
Czyste ścinanie jest szczególnym przypadkiem płaskiego stanu naprężenia, w którym działają w kierunkach głównych (1) i (2) równe co do wartości naprężenia normalne, ale o przeciwnych znakach: sy = -sx = s (rys. 1a). Koło Mohra dla czystego ścinania przedstawiono na rys. 1b. Maksymalne naprężenie ścinające występują w płaszczyznach usytuowanych pod katem 45° lub -45° do kierunków głównych. W punkcie S1 mamy t1 = s oraz t2 = -s dla punktu S2. Naprężenia normalne w tych kierunkach są równe zeru. Oznacza to, że element
abcd obrócony o kat 45° względem kierunków głównych jest obciążony wyłącznie
naprężeniami ścinającymi, znajduje sie wiec w stanie czystego ścinania.
11. Który z wykresów na rysunku momentów zginających jest prawdziwy dla belki wspornikowej obciążonej jak na rysunku? ok
12. Jaką wartość przyjmuje współczynnik długości wyboczenia dla pręta jak na rysunku? ??
Dla tego sposobu umocowania pręta wartość współczynnika długości wyboczenia przyjmuje wartość 1. Użyte jest to do wzoru na obliczenie długości zredukowanej pręta r=α*l gdzie :
r - długość zredukowana
α - współczynnik długości wyboczenia
l - długość pręta
13. Ile wynosi naprężenia zredukowane dla płaskiego stanu naprężeń (w układzie kierunków głównych) wg hipotezy HMH? ??
14. Ile wynosi maksymalne naprężenie normalne w pręcie zamocowanym i obciążonym jak na rysunku? ok
D- pole powierzchni przekroju poprzecznego belki.
Wydaje mi się, że naprężeniem maksymalnym jest σAC.
Wnioskuje to na podstawie podobnego zadania rozwiązanego na ćwiczeniach z wytrzymki.
15. Ile wynoszą naprężenia w punkcie A elementu obciążonego jak na rysunku. Przekrój poprzeczny elementu jest kołem o średnicy a. ok
W tym przypadku mamy rozciąganie ze zginanie, więc narażenia w punkcie A będą sumą naprężeń rozciągających i zginających względem tego punktu.
16. Wytrzymałość materiałów jest dziedziną wiedzy inżynierskiej, która służy czemu? Wytrzymałość materiałów, opierając się na prawach mechaniki ogólnej, zajmuje się badaniem zdolności materiału do przenoszenia określonej wartości obciążenia przy jego odporności na odkształcenie i zniszczenie. Cele te sprowadzają się do podania, przy uwzględnieniu założeń upraszczających, możliwie elementarnych wzorów praktycznych, służących za podstawę obliczeń wytrzymałościowych typowych elementów konstrukcyjnych w prostych przypadkach obciążeń.Podstawą wytrzymałości materiałów są przesłanki doświadczalne i teoretyczne. Ostatecznym kryterium sprawdzenia słuszności twierdzeń i rozważań teoretycznych jest i tutaj - tak jak w każdej nauce technicznej - doświadczenie.
17. Sprawdzenie jakiego warunku jest konieczne w celu wytrzymałościowej oceny konstrukcji ? Należy porównać naprężenia w najbardziej obciążonych przekrojach elementu konstrukcyjnego z naprężeniami dopuszczalnymi. Musi być spełniona następująca zależność :
Gdzie: F- uogólnione obciążenie (siła, moment zginający, moment skręcający); A - uogólniony wskaźnik przekroju (pole powierzchni przekroju, wskaźnik przekroju zginania, wskaźnik przekroju skręcania), σdop(k) - naprężenie dopuszczalne dla określonego sposobu obciążenia
Przy czym :
Gdzie: R- naprężenia niszczące, n - współczynnik bezpieczeństwa
Naprężenia dopuszczalne przyjęto oznaczać przez kindeks
18. Dla jakich próbek materiału są sporządzone Krzywe Wöhlera? ok
Krzywe Wöhlera są sporządzane dla próbek materiału poddawanych naprężeniom symetrycznym (obustronnym) - zginanie Zgo, rozciąganie Zro, ściskanie Zrc lub skręcanie Zso
Jak również mogą być sporządzane dla próbek materiałów poddawanych naprężeniom jednostronnym - rozciąganie Zrj, zginanie Zgj, skręcanie Zsj
19. Co to są główne centralne osie bezwładności przekroju? Ok
Są to główne osie bezwładności przechodzące przez środek ciężkości przekroju figury.
20. Czemu jest równa pochodna
zgodnie z twierdzeniem Schwedlera - Żurawskiego? Ok
Pochodna momentu gnącego przy zginaniu belki
zgodnie z twierdzeniem Schwedlera - Żurawskiego jest równa sile tnącej T(z) działającej na tą belkę.
21. Co jest miarą wytężenia materiału wg. Hipotezy wytężeniowej M.T. Hubera? ??
Hipoteza ta zakłada, że o wytężeniu decyduje energia właściwa odkształcenia postaciowego.
22. Przy jakich założeniach zostało rozwiązane przez L. Eulera zagadnienie wyznaczenia siły krytycznej dla ściskanego pręta prostego? Ok
Założenia potrzebne do wyznaczeni siły krytycznej to :
Materiał pręta jest jednorodny i izotopowy
Materiał pręta podlega prawu Hooke'a
Oś działania obciążenia pokrywa się z osią pręta
23. Wskaż poprawną postać zależności na wskaźnik zginania przekroju. Ok
Gdzie:
Wg - wskaźnik wytrzymałości przekroju na zginanie
Ix - moment bezwładności przekroju względem osi x
ymax - odległość punktu przekroju najbardziej oddalony od warstwy obojętnej
24. Kiedy stosuje się hipotezę płaskich przekrojów w analizie naprężeń przy skręcaniu? ??
Hipotezę płaskich przekrojów w analizie naprężeń przy skręcaniu stosuje się ją wtedy, gdy przekrój poprzeczny belki skręcanej ma profil kołowy. Belki o przekroju niekołowy ulegają tzw. deplanacji, co nie umożliwia korzystanie z tej hipotezy.
PODSTAWY NAUKI O MATERIAŁACH
1. Które wiązanie między atomami (cząsteczkami) jest najsłabsze?
van der Waalsa
2. Największy wpływ na moduł Younga metali ma:
sieć krystaliczna (budowa)
3. Nadstopy (superstopy) są to materiały stosowane:
W lotnictwie, przemyśle energetycznym i morskim wykorzystywane są m.in. na łopatki turbin gazowych, komory spalania i inne elementy turbin poddawane wysokim temperaturom.
4. Podstawowym mechanizmem umocnienia duraluminium jest:
?Umocnienie wydzieleniowe?
5. Który z mechanizmów umocnienia stali jednocześnie zwiększa granicę plastyczności i obniża temperaturę przejścia w stan kruchy
Odpuszczanie
6. Zdecyduj, które stwierdzenia są prawdziwe:
Stal niskowęglowa ma większą ciągliwość niż średni węglowa ponieważ:
- ma w strukturze więcej ferrytu
- ma mniejszą zawartość węgla
7. Podstawowym pierwiastkiem powodującym zwiększenie odporności stali na korozję jest
chrom
8. Najkrótsza definicja martenzytu to
forma stopu żelaza i węgla powstała przez rozpad austenitu przy jego szybkim schładzaniu. Temperatura początku i końca przemiany martenzytycznej w dużym stopniu zależy od zawartości węgla w stopie.
Austenit przesycony(roztwór węgla w żelazie alfa)
9. Ulepszanie cieplne stali jest to proces polegający na
Ulepszanie cieplne jest procesem polegającym na zahartowaniu i niskim, średnim lub
wysokim odpuszczaniu stali. Prowadzi ono do uzyskania najlepszej kombinacji własności wytrzymałościowych i plastycznych
10. Stopów aluminium nie można hartować, ponieważ
Traci swoje własności mechaniczne („miękkie jak szmata” )
11. Stale stosowane na duże konstrukcje (mosty, budynki, rurociągi itp.) wymagające dużej spawalności powinny zawierać
Powinny zawierać mało węgla
12. Temperaturę przejścia w stan kruchy wykazują metale
O sieci krystalicznej przestrzennie centrowanej
13. Wzrost zawartości perlitu w stali spowoduje
Wzrost wytrzymałości , zmniejszenie plastyczności ????
14. Którego pierwiastka należy dodać do stali, aby otrzymać austenit w temperaturze pokojowej
Duże ilości dodatków stopowych, takich jak chrom, obniżają temperaturę przemiany
austenitycznej tak, że stabilny austenit daje się uzyskać w normalnych temperaturach.
15. Mosiądze są to stopy miedzi z
cynku
16. Wytrzymałość mechaniczna ceramiki:
Duża odporność na ściskanie
17. Defekty mikrostruktury:
Punktowe: (wakancje, atomy różno węzłowe, atomy międzywęzłowe własne, atomy
międzywęzłowe obce)
Liniowe: (dyslokacje)
Powierzchniowe: (granice ziaren)
18. Współczynnik załamania światła rdzenia światłowodu:
Współczynnika załamania światła rdzenia światłowodu jest:
a) Co do wartości większy niż współczynnik załamania światła płaszcza
światłowodu
b) Dla światłowodów skokowych ma skokowy profil (promienie świetlne
podążają zygzakami odbijając się od granicy rdzeń-płaszcz)
c) Dla światłowodów gradientowych zmienia się on płynnie (osiąga maksymalną
wartość wzdłuż włókna)
19. Ściernice twarde używane są do obróbki materiałów:
Ściernice twarde stosuje się do obróbki materiałów miękkich.
20. W której z wymienionych polireakcji wydzielany jest produkt uboczny?
Polikondensacja
21. Najwyższy moduł sprężystości posiada kompozyt poliestrowy zbrojony włóknami:
Włókna węglowe
22. Jaką szczególną właściwością są obdarzone polimery zwane
elektrostrykcyjnymi?
pod wpływem przyłożonego napięcia elektrycznego wykazują mechaniczne odkształcenie.
23. Jaka jest charakterystyczna cecha duroplastów
usieciowana struktura, która tworzy się pod wpływem działania podwyższonej temperatury (duroplasty termoutwardzalne) lub pod wpływem czynników chemicznych (duroplasty chemoutwardzalne)
24. Który z wymienionych rodzajów kompozytów posiada szczególnie dużą zdolność pochłaniania energii uderzenia?
Kompozyty zbrojone włóknami
25. Który typ zbrojenia jest stosowany w kompozytach w celu uzyskania materiału izotropowego lub niemal izotropowego?
Zbrojenie cząstkami
26. Bionika (biomimetyka) zajmuje się:
nauka opierająca się o naśladowanie układów biologicznych i biochemicznych
PODSTAWY KONSTRUKCJI MASZYN
Która definicja projektowania w inżynierii mechanicznej jest słuszna:
Definicja projektowania - jest obmyślaniem nowych wytworów i układów bądź sposobów przekształcania dotychczas istniejących.
Projektowanie jest czynnością poprzedzającą wytwarzanie lub przetwarzanie. Są to działania zmierzające do zaspokojenia potrzeb ludzkich.
Projektowanie odnosi się do różnych dziedzin życia. Projektuje się obiekty materialne oraz układy niematerialne. Projektuje się więc zakłady przemysłowe, osiedla, szkoły, sieci transportowe, systemy finansowe, systemy organizacji, maszyny, urządzenia itp.
Projekt jest abstrakcyjnym obrazem wytworu lub układu, który ma być wytworzony.
Która definicja konstruowania w inżynierii mechanicznej jest słuszna:
Definicja konstruowania - to szczegółowe projektowanie maszyn i ich zespołów i elementów.
Konstrukcja - nazywamy abstrakcyjny obraz maszyny ze wszystkimi jej cechami powstający w umyśle konstruktora. Konstruowanie to proces tworzenia konstrukcji.
Projektowanie sekwencyjne to:
Projektowanie sekwencyjne - metoda projektowania polegająca na podziale na pojedyncze fazy o określonych czasach wykonania i składająca się z oddzielnych kroków.
Rzeczywisty współczynnik bezpieczeństwa to
Rzeczywisty współczynnik bezpieczeństwa - uwzględnia zmienny charakter obciążeń, karby, kształt elementu, itd. stosuje się w momencie sprawdzania konstrukcji na zmęczenie.
δ =
, gdzie:
β - wsp. spiętrzenia naprężeń
g(jako gamma) - wsp. wielkości przedmiotu
σa - amplituda naprężeń
Zo - granica wytrzymałości zmęczeniowej
Obróbkę cieplno-chemiczną stalowych elementów maszyn stosujemy w celu
Obróbka cieplno-chemiczna - stosowana w celu ulepszenia wytrzymałości obrabianego materiału oraz zapewnienia odporności na trudne środowisko pracy elementu.
Połączenia nitowe charakteryzują się
Połączenia nitowe charakteryzują się:
Są nierozłączne,
Wszystkie nity w połączeniu są jednakowo obciążone,
Oblicza się je ze względu na ścinanie i naciski powierzchniowe,
Dwa rozciągane płaskowniki o grubości „g” połączono w jednym przypadku spoiną czołową, a w drugim pachwinowym złączem zakładkowym. W którym przypadku uzyskano większą wytrzymałość złącza
2 spoiny - gdy zastosuje się spoinę czołową, która przebiega pod kątem 45° do boku elementów spawanych, uzyskuje się wytrzymałość spoiny równą wytrzymałości materiału - ten sposób połączenia spawanego jest lepszy.
Stale łatwo spawalne to takie, które
Stale łatwo spawalne - Ogólnie za łatwo spawalne stale uważa się stale nie zawierające powyżej 0,25% węgla (C) lub stale w których równoważnik węgla - CEV jest mniejszy od 0,45%. Stale o oznaczeniach: starych - S, SX, SY, nowych - JR.
9. Realizując połączenia zgrzewane, należy
Zgrzewaniem nazywa się zwykle proces łączenia materiałów w wyniku lokalnego ich ogrzania do stanu ciastowatości i dociśnięcia do siebie. Skuteczność procesu zgrzewania zależy głównie od docisku, temperatury i czasu trwania procesu.
10. Złącza klejone należy tak kształtować, aby
11.Które uporządkowanie zarysów gwintów, odpowiada rosnącej sprawności
Gwint prostokątny - najstarszy rodzaj gwintu stosowany w połączeniach ruchomych. Cechuje się największą sprawnością, ale i najmniejszą wytrzymałoscią.
Gwint trapezowy niesymetryczny ma środkowanie na zewnętrznej powierzchni
śruby, a kąt powierzchni roboczej r = 3°. Dzi ęki takiemu małemu kątowi sprawność
gwintu jest duża (przy odpowiednim kierunku ruchu). Jeszcze mniejszy kąt byłby
niekorzystny ze względów technologicznych. Gwint trapezowy niesymetryczny jest stosowany przy jednostronnym działaniu
dużych sił, przy dużej prędkości, gdy wymagana jest duża sprawność i wytrzymałość
zmęczeniowa (śruby w połączeniach ruchowych pras śrubowych, zaciskowych
urządzeń walców, haków, dźwigów itp.)
Sprawność gwintu ၨg wyznacza się jako stosunek pracy użytecznej do pracy włożonej, przy czym pracę odnosi się do jednego obrotu śruby (nakrętki)
Przy wyznaczaniu sprawności połączenia gwintowego ၨp, niezbędnej do określenia np. przy mechanicznym napędzie śruby, należy przyjąć do obliczeń wartość momentu skręcającego Ms
gwinty o zarysie trójkątnym (metryczne) należą do gwintów spoczynkowych, tzn. dokręcić i już. Gwinty ruchowe służą przede wszystkim do przenoszenia napędów. do nich możemy zaliczyć gwinty o zarysie prostokątnym i trapezowym. Największą sprawność mają gwinty prostokątne, ale ze względu na szybkie zużycie i małą dokładność. mają mniejsze zastosowanie .niż gwinty trapezowe. W gwintach trapezowych jest większa powierzchnia styku śruby z nakrętką, jest większe tarcie, dlatego sprawność takiej śruby jest mniejsza niż śruby z gwintem prostokątnym. Aby to częściowo wyeliminować, w śrubach które przenosiły siły w jednym kierunku, (w drugą stronę ruch powrotny) wymyślono śruby trapezowe niesymetryczne (kąt zarysu strony roboczej 15 stopni, strona powrotna, mniej obciążona 3 stopnie. Oznaczenie gwintu "S" W gwintach trapezowych "dwustronnego działania"zarys gwintu wynosi 30 stopni. Oznaczenie Tr(średnica x skok).
Rosnąca sprawność gwintów:
Trójkątny
TRapezowy symetryczny
trapezowy niesymetryczny
prostokątny
12. W obciążonej osiowo stalowej śrubie współpracującej ze stalową nakrętką o
wysokości H = 1,0 d
Krytyczne naprężenia występują w rdzeniu śruby
13. Gwint okrągły charakteryzuje się
Gwint okrągły (gwint o zarysie kołowym) - posiada zaokrąglony zarys przez co charakteryzuje się dużą wytrzymałością zmęczeniową i statyczną. Jest stosowany w połączeniach spoczynkowych często rozłącznych oraz narażonych na zanieczyszczenia i korozję, m.in. w złączach wagonowych, hakach żurawi, przewodach pożarniczych, elektrotechnice
14. Walcowe połączenia wciskowe charakteryzują się
Podstawowym parametrem charakteryzującym połączenia wciskowe jest wcisk N (ujemny luz). Wciskiem N nazywa się dodatnią różnicę wymiarów średnic wałka (dz) i otworu w oprawie (Dw) przed ich połączeniem:
Podczas montażu połączenia w obu częściach powstają odkształcenia sprężyste wywołujące docisk na powierzchniach styku. Dzięki temu jest możliwe przenoszenie obciążeń przez to połączenie (siły wzdłużnej lub momentu skręcającego).
Połączenia te charakteryzują się dużą nośnością
15. W modelu wytrzymałościowym połączenia ze sworzniem ciasno pasowanym
W połączeniu ze sworzniem ciasno pasowanym najważniejsze są naprężenia ścinające.
16. Połączenia wielowypustowe są
17. Wykres Wöhlera
to wykres zależności pomiędzy wartością naprężeń niszczących próbkę danego
materiału i ilością cykli zmian obciążenia tej próbki
ZK - wytrzymałości zmęczeniowej przy małej liczbie cykli,
ZO - ograniczonej wytrzymałości zmęczeniowej,
ZZ - nieograniczonej lub trwałej wytrzymałości zmęczeniowej. (oznaczane również
jako z g )
18. Wysoka gładkość powierzchni jest
- istotna i pożądana dla powierzchni współpracujących,
- mało istotna dla powierzchni zewnętrznych, nie współpracujących z innymi
elementami,
- kosztowna do uzyskania
- nietożsama z dokładnością wykonania (gładka powierzchnia nie oznacza, że
przedmiot jest dokładnie wykonany)
19. Koła wagonów ciągnionych przez lokomotywę, są osadzone na
Wcisk
20. Między trwałością łożysk tocznych a ich nośnością istnieje związek
gdzie L-trwałość łożyska
C - nośność dynamiczna łożyska
P - obciążenie równoważne
p=3 dla łożysk kulkowych, p=10/3 dla łożysk walcowych
21. Równanie Reynoldsa pozwala na
Obliczanie parametrów pracy/dobór lepkości oleju dla łożysk ślizgowych.
22. Lepkość dynamiczna ( η )
to wielkość wyrażająca stosunek naprężeń ścinających do prędkości ścinania [Pa*s]
23. Związek między napięciami w cięgnach przekładni pasowej to:
Su=Sc−Sb
24. Ewolwenta to
krzywa powstała z odwinięcia punktu z okręgu podstawowego.
25. Zęby ewolwentowe powinny być korygowane, gdy
a) chcemy uniknąć podcięcia zębów (a podcięcie występuje gdy zg=17 zębów lub
zg '=14 zębów - jeśli lekkie podcięcie jest dopuszczalne)
b) chcemy zmienić odległość kół
EKSPLOATACJA MASZYN
1. Trwałość maszyny jest to:
własność, która charakteryzuje proces zużywania się urządzenia podczas jego eksploatacji
2. Niezawodność jest to:
- jest to prawdopodobieństwo poprawnej pracy obiektu technicznego w określonych warunkach eksploatacji i w określonym czasie
- zdolność urządzenia do zrealizowania postawionych mu zadań
3. Charakterystyką niezawodnościową jest:
4. W okresie normalnej pracy, niezawodność obiektu techn. opisana jest
rozkładem:
częstotliwość uszkodzeń jest niska, uszkodzenia są wynikiem głównie
ograniczeń tkwiących w projekcie, zmęczenia, zużycia, lub błędów eksploatacyjnych
5. W okresie starzenia niezawodność opisana jest rozkładem:
wynika z naturalnego zużycia elementów, zmiany właściwości materiałów,
okres starzenia powinien być określony przez konstruktora
6. Parametr strumienia uszkodzeń spełnia warunek:
określa prawdopodobieństwo uszkodzenia obiektu w przedziale czasu (t, t+Δt) niezależnie od tego, czy w momencie t obiekt był sprawdzony czy też nie .Parametr strumienia uszkodzeń ω(t) można oszacować na podstawie danych eksploatacyjnych, korzystając ze wzoru
gdzie: n (t, t+Δt) - liczba uszkodzeń w przedziale czasu Δt,
Δt - długość przedziału czasu na jaki podzielono okres obserwacji,
N - liczba badanych obiektów.
7. Weryfikując hipotezę o zgodności rozkładów testem W-Shapiro - Wilka wymagana liczba próbek to:
3≤n≤50
8. Graficzne metody testowania hipotez stosujemy dla rozkładów:
- wykładniczy
- normalny
- Weibulla
9. Niezawodność obiektu technicznego zależy od:
10. Funkcja niezawodności umożliwia prognozowanie:
TECHNIKI WYTWARZANIA
1.W wielkich piecach produkuje się:
Produkty wielkiego pieca: surówka przeróbcza (płynna), żużel wielkopiecowy, gaz wielkopiecowy.
Żużel wielkopiecowy - produkt uboczny powstający z topników skały płonnej oraz popiołu z koksu - jest przerabiany na tłuczeń, na materiał izolacyjny, dodatek do produkcji cementu.
Gaz wielkopiecowy - gaz niskokaloryczny, po oczyszczeniu skierowany do nagrzania wielkopiecowych komór grzewczych w bateriach koksowniczych oraz do siłowni hutniczych.
2. Surówka wielkopiecowa to stop żelaza i węgla o zawartości węgla w zakresie:
3,5-4,5% C
3. Konwertory tlenowe służą do produkcji:
Stali
4. Stal ma zawartość węgla do:
Węgiel poniżej 1,75% (w praktyce najczęściej poniżej 0,8%)
5. W procesie ciągłego odlewania stali wytwarza się:
Kęsy stali
6. Obróbka pozapiecowa stali ma na celu usunięcie:
Zabiegi obróbki pozapiecowej polegają na:
obróbce pod żużlem rafinacyjnym,
uzupełnieniu i ujednorodnieniu składu chemicznego oraz temperatury w całej objętości kadzi,
wprowadzeniu mikrododatków i modyfikatorów metodą drutów rdzeniowych lub w postaci kawałkowej,
przedmuchiwaniu gazem obojętnym w celu oczyszczenia stali z wtrąceń niemetalicznych,
odsiarczaniu.
7. Spiek stosowany w procesach hutnictwa stali to:
Mieszanka spiekalnicza - rudy, koncentraty, topniki, odpady żelazonośne oraz koksik.
8. Miedź elektrolityczna ma zawartość Cu:
Miedź katodowa jest produktem elektrolitycznej rafinacji miedzi i może zawierać do 0,05% zanieczyszczeń.
9. Aluminium jest wytwarzane z:
Boksytów
10. Do przetwórstwa granulatów polimerów stosuje się:
Prasowanie, spiekanie, wytłaczanie, kalandrowanie, tłoczenie. Homogenizacja (ujednorodnienie) składu mieszaniny i nadanie jej regularnego kształtu. Homogenizacja składników tworzywa prowadzona jest najczęściej metodą wytłaczania, głównie w wytłaczarkach dwuślimakowych.
TECHNOLOGIA OBRÓBKI BEZUBYTKOWEJ
1. Kostka o wymiarach l0xb0xh0 (długość x szerokość x wysokość) została odkształcona do wymiarów l1xb1xh1. Względne wydłużenie w tym procesie odkształcenia jest określone zależnością:
2. Przy odkształceniu plastycznym obowiązuje związek między odkształceniami rzeczywistymi, który związek jest prawidłowy?
- wskaźnik wydłużenia
- wskaźnik poszerzenia
- wskaźnik gniotu
- rzeczywista miara odkształceń
3. Wartość liczbowa powierzchni styku przy walcowaniu zależy od:
promienia walca,
gniotu,
sił tarcia,
naciągu i przeciwciągu,
oporu odkształcenia plastycznego na długości łuku styku.
4. Jaki jest wpływ naciągu i przeciwciągu na wartość siły nacisku przy walcowaniu płaskiego pasma?
Naciąg i przeciwciąg stosuje się:
dla zmniejszenia nacisku metalu na walec (dodatkowe siły wykonują dodatkową pracę walcowania),
do jednoznacznego określenia przepływu materiału między klatkami, kolejna klatka ,,wyciąga” materiał z klatki poprzedzającej.
5. Do uzyskania wsadu płaskiego o grubości h1 z początkowej h0 wymiar prześwitu między walcami przed przepustem powinien być:
Mniejszy od h1.
6. Przy ciągnieniu rur w ciągarce praktycznie nie zmienia się grubość jej ścianki przy ciągnieniu:
Przy ciągnieniu na pusto (swobodnie), gdy wzdłużne naprężenie rozciągające i obwodowe naprężenie ściskające równoważą się.
7. Przy ciągnieniu rur o tych samych wymiarach wejściowych i wyjściowych największe zapotrzebowanie mocy występuje:
Całkowita moc odkształcenia:
- moc idealnego odkształcenia plastycznego,
- moc tarcia,
- moc wewnętrznego ścinania,
- moc idąca na pokonanie dodatkowych sił zewnętrznych, takich jak np. naciągi i przeciwciągi.
Tutaj odpowiedź zostawiam Wam, ja dałbym, że na pokonanie sił tarcia (zwłaszcza na początku).
8. Podczas walcowania skośnego rura przemieszcza się:
Materiał walcowany uzyskuje ruch śrubowy (złożenie ruchu obrotowego z postępowym).
9. Grubościenną tuleję rurową można wykonać ze wsadu o przekroju:
Materiałem wsadowym są: wlewki odlewane (ciągłe z COS) lub kęsy i kęsiska - o przekroju kwadratowym lub okrągłym, wlewki wielokątne.
Etap wstępnego przerobu plastycznego - jest etapem, w którym ze wsadu na rury wytwarza się grubościenne tuleje rurowe, realizując proces w walcarkach skośnych, prasach lub praso walcarkach.
10. Walcarka Assela służy do:
Walcarka Assela - trzywalcowa maszyna służąca do wydłużania tulei grubościennych, uzyskanych na prasie. Walcarka Assela jest najpopularniejszą walcarką stosowaną do produkcji rur. Składa się z 3 walców rozstawionych pod kątem 120˚. Proces polega na redukcji ścianki rury do żądanej grubości z zachowaniem średnicy wewnętrznej. Proces ten przeprowadzany jest przez walcowanie rur na trzpieniu ruchomym.
11. Walcowanie rur w walcarce reduktor odbywa się:
Wykończenie stalowych rur bez szwu przebiega w zależności od wymiarów walcowanych rur, w kilku etapach obejmujących m.in. operację wykańczania na gorąco poprzez walcowanie redukcyjne - z możliwością produkcji kształtowników zamkniętych, lub kalibrujące.
Wykończenie na gorąco rur bez szwu - proces walcowania redukcyjnego rur, prowadzony z naciągiem, pozwala znacznie rozszerzyć asortyment gotowej produkcji. Jest to możliwe z uwagi na prowadzenie procesu z prawie stałej średnicy rury wstępnej (ok. 118 mm) jednakże o zmiennej grubości ścianki w ciągłym układzie klatek walcarki redukcyjnej, przy czym odkształcenie rury oparte jest o zmiany:
Średnicy zewnętrznej walcowanych rur, realizowanej wielkością wykrojów walców, narzucanych za pomocą gniotu w poszczególnych klatkach,
Grubości ścianki walcowanych rur, realizowanej wielkością współczynników naciągu
w poszczególnych klatkach, określonego jako stosunek wzdłużnego naprężenia rozciągającego w rurze
do naprężenia uplastyczniającego walcowanego materiału
, określonego w danych warunkach termoplastycznych procesu odkształcenia:
12. Walcowanie rur w walcarce reduktor pracującej bez naciągu i przeciwciągu powoduje:
W przypadku teoretycznym gdy m=1 podczas redukowania rura byłaby rozciągana przy naprężeniu wzdłużnym między klatkami równym naprężeniu uplastyczniającemu, a zatem przy każdym zwiększeniu naciągu do wartości m>1 rura ulegałaby zerwaniu.
13. Zastosowanie naciągu i przeciwciągu podczas walcowania rur w walcarce reduktor powoduje:
Współczynnik naciągu musi spełniać warunek m
0,8. W praktyce w początkowych klatkach gdzie m=0,12-0,25 oraz końcowych gdy wartości tego współczynnika są również małe, następuje pogrubienie ścianki, zmniejszające się w miarę wzrostu naciągu. Przy m=0,5 grubość ścianki redukowanej rury praktycznie nie ulega zmianie. Przy dalszym zwiększaniu współczynnika naciągu powyżej wartości 0,5 (w praktyce do 0,8) następuje coraz większe pocienienie walcowanej ścianki rury.
14. Zastosowanie pierścienia dociskowego w procesie tłoczenia powoduje:
Najprostszym sposobem zapobiegania fałdowaniu płaskiego kołnierza jest zastosowanie dodatkowego pierścienia dociskającego blachę o powierzchni pierścienia ciągowego z pewną siłą F, a więc prowadzenie wytłaczania z dociskaczem. Zastosowanie dociskacza powoduje pojawienie się dodatkowych oporów wytłaczania, związanych z silami tarcia, występującymi pomiędzy kołnierzem a powierzchniami pierścienia ciągowego i dociskacza.
15. W procesie wykrawania stempel współpracujący z płaską matrycą stosuje się w celu:
Cięcie na prasach nazywamy wykrawaniem. Narzędziami w procesie wykrawania są wykrojniki. Wykrawanie odbywa się pod naciskiem stempla. Stempel i matryca muszą być hartowane i szlifowane a ich krawędzie ostre. Są one jakby nożami o zamkniętym obrysie, mającym sprzężone ze sobą krawędzie.
16. Głębokość tłoczenia jest ograniczona przez:
Własności technologiczne materiału są ograniczone za pośrednictwem jego własności mechanicznych, które zależą głównie od składu chemicznego, struktury i wielkości ziaren, obróbki cieplnej i stopnia zgniotu. Duży wpływ na własności technologiczne i mechaniczne materiałów walcowanych na zimno, stosowanych w tłocznictwie, ma stopień zgniotu przy walcowaniu oraz charakter obróbki cieplnej. Duży wpływ na własności technologiczne i przydatność blach do tłoczenia ma strukturalna postać węgla (ujemny wpływ strukturalnie swobodnego cementytu), wielkość i kształt ziaren ferrytu, stan powierzchni (brak widocznych linii poślizgu przy odkształceniu i tzw. ,,skórki pomarańczowej”). W przypadku blachy stalowej cienkiej do głębokiego tłoczenia wymagane jest drobne, równomierne ziarno, brak struktury pasmowej, brak strukturalnie wolnego cementytu, brak wtrąceń niemetalicznych.
17. Warunkiem przejścia metalu w stan plastyczny w złożonym stanie naprężenia jest:
Przejście metalu w stan plastyczny nastąpi, gdy panujący stan naprężeń spowoduje przekroczenie warunku plastyczności, tzn. uogólnione naprężenie zastępcze osiągnie wielkość równą naprężeniu uplastyczniającemu lub granicy plastyczności metalu w danych warunkach odkształceń plastycznych.
18. Istotą procesów obróbki plastycznej wyróżniających je spośród innych metod wytwarzania jest:
Stan metalu lub stopu w czasie jego trwałego odkształcania nazywa się stanem plastycznym, proces trwałej zmiany postaci, zachodzący w tym stanie, określa się jako odkształcenie plastyczne. Poszczególne objętości metalu przemieszczają się względem siebie pod działaniem sił zewnętrznych i metal otrzymuje żądany kształt bez naruszenia spójności między krystalicznej, przy czym tę jego zdolność nazywamy plastycznością.
19. Najbardziej wydajnym procesem przeróbki plastycznej jest:
Walcowanie
20. Wyroby z mas plastycznych o dużych gabarytach uzyskuje się w procesie:
Kucie swobodne stosuje się przy niewielkich seriach lub przy wykonywaniu odkuwek ciężkich.
21. Proces wtrysku wielokomponentowego stosuje się w celu:
Proces jednoczesnego wtrysku tworzyw o różnych własnościach znany jest od ok. 30 lat. Początkowo pojawił się wtrysk tworzy o różnych kolorach. Technika wtrysku była stopniowo udoskonalana i obecnie stosowany jest wtrysk wielokomponentowy, którego głównymi przykładami jest produkcja wyprasek o konstrukcji:
warstwa wierzchnia wykonana z tworzywa wzmocnionego, rdzeń z tworzywa niewzmocnionego,
warstwa wierzchnia twarda, rdzeń miękki (lub odwrotnie),
warstwa wierzchnia wykonana z pełnowartościowego tworzywa, rdzeń z recyklatu lub tworzywa o gorszych własnościach,
warstwa wierzchnia nie przewodząca ładunków elektrycznych, rdzeń przewodzący.
Obecnie spotykanych jest kilkanaście rozwiązań możliwych kombinacji tworzyw. Technika wtrysku wielokomponetowego stworzyła możliwości wykonywania detali o właściwościach wcześniej nieosiągalnych.
22. Technologia prasowania i spiekania proszków metali znajduje swe główne zastosowanie w:
Metodę tę najczęściej wykorzystuje się wtedy, gdy metody topienia i odlewania zawodzą. Z tego powodu metodami metalurgii proszków wytwarzamy:
metale trudno topliwe jak np. wolfram, molibden, tantal, iryd,
spieki metali i niemetali wykazujące znaczne różnice temperatury topienia, jak np. materiały na styki elektryczne z wolframu i srebra, szczotki do maszyn elektrycznych z grafitu i miedzi,
materiały porowate na łożyska samosmarujące,
materiały które w stanie ciekłym są gęstopłynne i trudne do odlewania jak np. materiały na specjalne magnesy trwałe.
TECHNOLOGIA OBRÓBKI UBYTKOWEJ
1. Kąt przystawienia ostrza χr narzędzia skrawającego jest zawarty pomiędzy:
płaszczyzną krawędzi skrawającej Ps, a płaszczyzną boczną Pf lub inaczej
prostą wskazującą kierunek ruchu posuwowego i rzutem głównej krawędzi skrawającej na płaszczyznę podstawy noża.
2. Dla jakiego przypadku toczenia kąt przystawienia ostrza jest równy 90o:
toczenie wzdłużne (???) - proszę sprawdzić jeszcze! , toczenie na automatach wielonożowych, toczenie przedmiotów długich o małej średnicy, toczenie powierzchni czołowych
3. Kąt pochylenia krawędzi skrawającej ostrza jest określany jako:
λs - kąt zawarty między krawędzią skrawającą, a płaszczyzna podstawową, może być dodatni lub ujemny.
4. Kąt natarcia γ ostrza noża tokarskiego określony w układzie ustawczym, w porównaniu do układu spoczynkowego jest:
jeżeli układ spoczynkowy to inaczej układ narzędzia, to kąt jest taki sam - inne są tylko indeksy, przy ustawczym indeks u.
5. Węgliki spiekane jako materiały na ostrza narzędzi skrawających do obróbki stali zawierają:
wybrane węgliki metali wysokotopliwych (wolfram, tytan, rzadziej tantal, niob, cyrkon, chrom o udziale objętościowym 65÷98%) i metali wiążących. Spoiwem węglików spiekanych jest kobalt, czasem nikiel lub wanad.
6. Wielkość zużycia ostrza określone wartością VB odnosi się do:
starcia na powierzchni przyłożenia oznaczone VB powstaje na skutek tarcia tej powierzchni o materiał skrawany
warunków skrawania:
, szybkość skrawania (v) i posuw (f), głębokość skrawania (ap).
7. Jakie rodzaje zużycia ostrza narzędzia są dominujące przy skrawaniu z niewielką prędkością skrawania:
Przy małych prędkościach, jak np. w przypadku skrawania narzędziami ze stali szybkotnącej, przeważa zużycie ścierne i adhezyjne
8. Okres trwałości ostrza to:
czas skrawania do jego stępienia, tj. do osiągnięcia maksymalnej dopuszczalnej wartości określonego wskaźnika zużycia lub np. wykruszenie krawędzi skrawającej czy wyłamanie znacznego fragmentu ostrza. Te ostatnie zjawiska nazywamy katastroficznym stępieniem ostrza. Dopuszczalną (krytyczną) wartość zużycia ostrza lub jego wykruszenie czy wyłamanie nazywamy kryterium trwałości ostrza.
9. Ile razy zmniejszy się okres trwałości ostrza z węglików spiekanych gdy prędkość skrawania zwiększy się dwukrotnie (wykładnik s = 5):
wydaje mi się, że 32 wg wzoru:
, jak damy
, s=5 i v powiedzmy 1 to w pierwszym mianownik to 1^5=1, a w drugim 2v = 2 i 2^5=32.
10. Jaką teoretyczną chropowatość powierzchni obrobionej Rz uzyskuje się przy posuwie narzędzia f = 1mm/obr i promieniu wierzchołka ostrza r = 0,5 mm :
wg wzoru:
, dlatego
11. Przeciąganie jest sposobem obróbki przedmiotów o dużej dokładności i złożonych kształtach stosowanym w:
obróbce dokładnych otworów wielobocznych, wielowypustowych, rowków wpustowych oraz do obróbki powierzchni kwadratowych zewnętrznych, np. w korbowodach, kluczach. Ze względu na znaczne koszty narzędzi przeciąganie znajduje zastosowanie wyłącznie w produkcji wieloseryjnej lub masowej.
12. Kinematyka obrabiarek do obwiedniowej obróbki kół zębatych odwzorowuje współpracę:
W wyniku sprzężenia ruchów obrotowych frezu ślimakowego oraz obrotowego obrabianego koła powstaje ruch toczny zapewniający uzyskanie zarysu ewolwentowego.
Ruch główny - będący ruchem obrotowym narzędzia (freza ślimakowego)
Ruch posuwowy - wykonywany przez narzędzie przemieszczające się wraz z suportem narzędziowym w kierunku rownoległym do osi obrabianego koła zębatego
Ruch odtaczania - wykonywany przy ścisłej synchronizacji obrotow narzędzia i
przedmiotu obrabianego
Ruch dodatkowy - wykonywany przez przedmiot obrabiany, w ścisłej synchronizacji z ruchem posuwowym narzędzia.
13. Podstawowym parametrem ściernicy wykonanej z materiałów supertwardych wpływającym na wydajność szlifowania jest:
prędkość obwodowa ściernicy [m/s]
średnica zewnętrzna ściernicy [mm]
prędkość skrawania
rozmiar ziaren ściernicy - do wyboru do koloru, odpowiedź nie jest niestety jednoznaczna
14. Największą składową siły skrawania przy szlifowaniu wałków jest:
obwodowa (styczna ) Pz, odporowa promieniowa Py, posuwowa (poosiowa)Px
15. Dla wywołania przeskoku iskrowego w obróbce elektroerozyjnej musi nastąpić:
do elektrody podłączone wysokie napięcie, a całość zanurzona w płynie dielektrycznym (np. nafcie - pod powierzchnią nie zapali się z powodu braku dopływu tlenu). Iskra uderza z elektrody w materiał, powodując odparowanie materiału. Elektroda powinna więc mieć wysoki ujemny potencjał.
Wskutek przyłożenia napięcia w szczelinie pomiędzy elektrodą roboczą a przedmiotem obrabianym, tworzy się niejednorodne, zmienne w czasie pole elektryczne. W miejscach, gdzie natężenie pola elektrycznego ma największą wartość, następuje koncentracja zanieczyszczeń w dielektryku. Przy dostatecznym natężeniu pola elektrycznego następuje przebicie.
16. Współczesne obrabiarki elektroerozyjne są wyposażone w generatory:
impulsów elektrycznych - tranzystorowe
17. Największą precyzję obróbki uzyskuje się przy zastosowaniu laserów:
miedziowych - CuBr
gazowych - CO2
18. Jakiego rodzaju naprężenia wynikowe rezydują w warstwie wierzchniej przedmiotu po obróbce z dominującym oddziaływaniem czynnika mechanicznego:
Do tych obróbek zaliczyć trzeba wszystkie technologie, które zmieniają stan warstwy w metodami mechanicznymi. Są to zatem różnego rodzaju nagniatania a także coraz popularniejsze ostatnio kulowanie. Warstwy wytworzone w wyniku tych obróbek charakteryzują się dużymi wartościami bezwzględnymi maksymalnych naprężeń własnych oraz granicy plastyczności (we wszystkich przypadkach jest to wynik obróbki plastycznej), niewielkimi zmianami innych własności mechanicznych.
19. Jakiego rodzaju naprężenia wynikowe rezydują w warstwie wierzchniej przedmiotu po obróbce mechanicznej z dominującym oddziaływaniem czynnika cieplnego:
To co wyżej +
Także późniejsza obróbka cieplna pozwala zmienić układ naprężeń własnych i podwyższyć minimalną wartość z -400 do -200MPa co uzyskano dla próbek walcowanych na głębokość 0.5mm. Pomiary twardości wskazują na ponad dwukrotny jej wzrost względem wartości początkowej, co wskazuje na dużą zmianę granicy plastyczności.
20. Co rozumie się pod pojęciem tarcia granicznego przy współpracy dwu elementów:
Tarcie graniczne występuje wtedy, podczas gdy powierzchnie trące są pokryte środkami smarnymi zawierającymi substancje powierzchniowo czynne, które tworzą na powierzchniach elementów warstwy graniczne wyjątkowo odporne na duże naciski również na stałe spośród nimi połączone. Zapobiega ono powstawaniu tarcia suchego przy nieciągłym dopływie środka smarnego.
TECHNOLOGIA SPAJANIA
1. Na jaki rodzaj obciążenia należy projektować zgrzeiny punktowe?
Zgrzeiny punktowe należy projektować tak, aby pracowały tylko na ścinanie.
2. Spawalność stali węglowych zależy od:
-wstępnego podgrzania stali
- od zawartości węgla w stali (im mniej węgla w stali tym jest ona lepiej spawalna)
- stosowanych dodatkowych materiałów podstawowych, a także dodatkowe druty otuliny
3. Stale węglowe uważa się za łatwo spawalne jeżeli:
Zawartość węgla w stali wynosi: 0,25 . 0,35 %C
(stale dobrze spawalne . 0,25%C)
T
4. Stale węglowe o zawartości węgla od 0,8 do 1,7 %C uważa się za:
Teoretycznie są uważane za w ogóle niespawalne, ale technika jest tak rozwinięta, że w jakiś
sposób dałoby się je zespawać dlatego można przyjąć, że są bardzo trudno spawalne.
5. Do spawania aluminium stosuje się spawanie:
-TIG ( Tungsten Inert Gas) - spawanie prądem przemiennym
-MIG
6. Do cięcia stali stopowych stosuje się:
Palnik acetylenowo-tlenowy.
7. Płomień acetylenowo-tlenowy można stosować do cięcia stali węglowych o zawartości
węgla:
Do 2%C (praktycznie do 1,6%C)
8. Wykonując spawanie do łączonych elementów dostarcza się ciepło powodując wzrost
temperatury. Od jakich wielkości zależy odkształcenie nagrzanych elementów:
- natężenie prądu spawania
- czas trwania spawania
- tylko U (napięcie jest stałe)
9. W metodzie MAG regulacji prądu spawania uzyskuje się przez:
- prędkość podawania drutu (im więcej podawanego drutu tym wyższe natężenie prądu)
10. Do spawania węzłów konstrukcji o wysokiej sztywności należy zastosować elektrodę o otulinie:
Otulinie o symbolu B - otulinie zasadowej
TECHNOLOGIA MASZYN
1. Jak nazywa się część procesu technologicznego stanowiąca zespół czynności głównych i pomocniczych wykonywanych na jednym stanowisku roboczym przez jednego lub grupę pracowników na jednym przedmiocie lub grupie przedmiotów bez przerw na wykonywanie innych prac?
Operacja technologiczna - zamknięta część procesu technologicznego obejmująca całokształt wszystkich czynności wykonywanych bez przerwy na jednym stanowisku pracy, przez jednego pracownika, na określonym przedmiocie. Wyróżniamy trzy cech operacji: niezmienność przedmiotu obrabianego, niezmienność stanowiska roboczego, niezmienność wykonawcy. Zamocowanie - jest to operacja, która jest wykonywana przy jednym ściśle określonym położeniu przedmiotu obrabianego na obrabiarce, przy czym każde przemieszczenie przedmiotu na obrabiarce jest nowym zamocowaniem
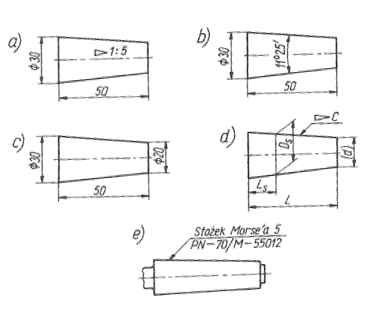
2. Poprawny technologicznie sposób wymiarowania powierzchni stożkowej polega na podaniu:
Średnice d, długość L, zbieżność C
Średnica d, długość L, kąt �� (między tworzącymi stożka)
Średnice d, d1, długość l
L, Ls, Ds, zbieżność C, (d)
Stożki znormalizowane: oznaczenie wg PN
3. W produkcji jednostkowej wałków stopniowanych o wysokiej dokładności zalecanym półfabrykatem jest:
Pręt walcowany
4. Który z elementów tworzących strukturę technicznej normy czasu pracy można wyznaczyć na podstawie zależności matematycznych?
Czas główny
5. Do jakiej grupy metod wyznaczenia technicznej normy czasu pracy należy chronometraż?
Podstawą doskonalenia organizacji pracy i produkcji jest normowanie czasu pracy, które sprowadza się do wyznaczenia czasu pracy realizowanej lub planowanej z wykorzystaniem trzech grup metod analitycznych, pomiarowych, obliczeniowych i porównawczych.
Programy do normowania czasu pracy stosowane są do pomiaru czasu:
• procesów fizycznie wykonywanych z wykorzystaniem metod analityczno- pomiarowych - głównie chronometrażu,
• procesów będących w fazie projektowania z zastosowaniem metod analityczno obliczeniowych przy wysokich oraz analityczno porównawczych przy niskich typach produkcji.
6. Który z wymienionych elementów technicznej normy czasu pracy występuje tylko jeden raz na serię wykonywanych produktów i nie zależy od jej liczności?
Czas przygotowawczo-zakończeniowy - czas związany z przygotowaniem do wykonania operacji technologicznej i jej zakończenia występujący tylko jeden raz na serię wykonywanych przedmiotów i niezależny od jej liczności
7. Który z etapów obróbki występujący w strukturze procesu technologicznego pozwala na uzyskanie dokładności wymiarowej w przedziale IT12 - IT10 oraz chropowatości powierzchni Ra = 5 - 2,5 μm?
Wykonanie operacji obróbki kształtującej /(zgrubnej)
8. Stosowana w projektowaniu procesów technologicznych metoda koncentracji jest jedną z metod:
Koncentracja operacji występuje wówczas, gdy w jednej operacji jest duża liczba zabiegów, będzie wykonana obróbka kilku powierzchni, będą wykonane różne rodzaje obróbki, np. obróbka zgrubna i kształtująca. Rozróżnia się trzy odmiany koncentracji: technologiczną, mechaniczną, organizacyjną.
9. Powierzchnia przedmiotu obrabianego, której położenie ustawia się względem odpowiednich elementów obrabiarki, uchwytu lub narzędzia stanowi bazę:
Baza nastawcza
Bazą nastawczą nazywamy powierzchnię lub linię obrabianego przedmiotu (np. linię wytrasowaną), według której odbywa się ustawienie przedmiotu na obrabiarce i kontrola tego ustawienia. Do najprostszych baz nastawczych należy zaliczyć linię lub punkty wytrasowane, które służą do ustawienia przedmiotu bezpośrednio na obrabiarce.
10. Która z informacji NIE występuje na karcie technologicznej opracowanej dla produkcji jednostkowej?
NIE występują informacje o:
Zabiegach (ze wskazaniem międzyoperacyjnych)
Szkicach operacyjnych
Operacjach które podają wszystkie szczegóły (kartach instrukcyjnych poszczególnych operacji )
11. Dokładność części po obróbce zależy między innymi od dokładności nastawienia obrabiarki. Jaką metodę stosuje się w produkcji jednostkowej?
Metoda wg próbnych przejść
12. W którym miejscu procesu technologicznego powinno występować azotonasiarczanie?
Azotonasiarczanie jest procesem finalnym i elementy po nim nie podlegają żadnej obróbce mechanicznej. Tylko dla części bardzo dokładnych można przewidywać operację docierania wykańczającego.
13. Charakterystyczną dla produkcji jednostkowej formą organizacyjną produkcji jest:
jednostkowa: produkcja, w której jednorazowo wykonuje się jedną lub kilka części wyrobów. Wyroby te nie powtarzają się, albo powtarzają się w nieokreślonym czasie.
14. Uchwyt obróbkowy, który powstał z uchwytu ogólnego przeznaczenia poprzez dokonanie w nim przeróbek cele dostosowania go zamocowania przedmiotu, dla którego w swym standardowym wykonaniu się nie nadawał nazywamy:
Uchwyt specjalny
15. Który z wymienionych dokumentów technologicznych występuje w dokumentacji montażu, a nie występuje w dokumentacji procesu technologicznego obróbki?
W dokumentacji montażu dodaje się: wykaz części lub podzespołów wchodzących w daną operację, a w części opisowej wskazuje się kolejność ich wmontowania i stosowane przy tym zabiegi
Opuszcza się szczegóły związane z procesem obróbki
16. Częścią, jakiego procesu jest proces technologiczny obróbki?
Procesu produkcyjnego
17. Wyjaśnij częścią, jakiego procesu jest operacja technologiczna?
Procesu technologicznego
18. Do jakiej grupy urządzeń zaliczana jest obrabiarka?
Urządzeń technologicznych
19. Wyjaśnij, jaki charakter ma procesu technologiczny?
Proces technologiczny
- część procesu produkcyjnego związana bezpośrednio ze zmianą kształtu, wymiarów, jakości powierzchni i własności fizykochemicznych elementów maszyn lub też łączeniem tych elementów maszyn w gotowy produkt. Funkcją procesu technologicznego jest zatem przekształcenie zbioru cech początkowych przedmiotu w zbiór cech końcowych.
Czynniki procesu technologicznego:
materiał obrabiany
stanowisko robocze
narzędzia
człowiek
20. Wyjaśnij, od jakich parametrów uzależnione jest projektowanie procesu?
Należy tak projektować proces aby:
Wykorzystać posiadane maszyny (dla istniejącego już zakładu)
Rozpatrzyć możliwości zdobycia odpowiednich środków inwestycyjnych na zakup maszyn
21. Wyjaśnij, czym jest proces montażu?
Procesem technologicznym montażu jest ta część procesu technologicznego wyrobu, w skład której wchodzą wszystkie czynności związane z łączeniem części w zespoły, a zespołów i części w gotową maszynę, zgodnie rysunkami i warunkami technicznymi. Proces montażu składa się z operacji montażowych, z których każda jest częścią procesu technologicznego montażu, wykonywaną na jednym lub kilku zespołach montażowych na jednym stanowisku montażowym.
22. Wyjaśnij, czym jest etap mechanizacja zakładu produkcyjnego?
Zwiększenie wydajności realizowane jest poprzez mechanizację - zmniejszającą, a w pewnych przypadkach eliminującą wysiłek fizyczny pracownika, i poprzez automatyzację - zmniejszającą wysiłek umysłowy i umożliwiającą oddzielenie w przestrzeni i czasie, pracy człowieka i maszyny, eliminujące prawie całkowicie pracę bezpośrednią
23. Wyjaśnij, jakim systemem jest elastyczny system produkcyjny?
Elastyczny system produkcyjny - system techniczny, w którym przepływ materiałów i energii, ich transformacja oraz procesy regulacyjne są zintegrowane w sposób zapewniający automatyczną i ciągłą realizację zadań produkcyjnych opartą na sterowaniu komputerowym.
Elastyczny system produkcji składa się z trzech części:
maszyn, które można przestawić na pożądaną produkcję;
systemu manipulacji materiałami, który przemieszcza części pomiędzy maszynami w zależności od możliwości i potrzeb obróbki;
sterującego komputera, który steruje pracą maszyn.
TERMODYNAMIKA
1. Czy w termodynamice pojęcie „intensywny parametr stanu” oznacza:
Wielkość fizyczna której wartość można określić na podstawie pomiaru, ale dla której nie ma znaczenia historia układu. Np. temperatura, ciśnienie, gęstość, które nie zależą od gęstości układu.
2. Czy gęstość gazu ρ jest to:
Stosunek masy gazu do zajmowanej przez niego objętości
3. Czy „zerowa zasada termodynamiki” daje podstawy do pomiaru:
Temperatury
4. Jaka jest zależność między ciśnieniem absolutnym p, manometrycznym pm i atmosferycznym pb:
p = Pm+Pb
5. Ciśnienie atmosferyczne wyrażono poprzez wysokość słupa cieczy h o gęstości ρ w polu grawitacyjnym o przyspieszeniu g. Ciśnienie to można obliczyć jako:
p= ρgh
6. Jaka zależność wiąże masę gazu M w [kg] z ilością jego substancji n w [kmol] jeżeli masa cząsteczkowa gazu wynosi µ [kg/kmol]:
M=n µ
7. Równanie stanu gazu doskonałego (Clapeyrona) w jednej ze swoich postaci wiąże ze sobą ciśnienie absolutne p, objętość właściwą v, indywidualną stałą gazową R i temperaturę bezwzględną T. Prawidłowa postać tego równania to:
pv=RT
8. Czy wartość uniwersalnej stałej gazowej µ R = 8314,51 [J/(kmol·K)] odnosi się do:
Gazu doskonałego, jest to wielkość stała i niezależna od wartości parametrów stanu ani od rodzaju gazu
9. Jeżeli wykładnik izentropy pewnego gazu wynosi κ = 1,4 a jego ciepło właściwe przy stałej objętości jest równe cv = 1000 [J/(kg·K)] to wartość jego indywidualnej stałej gazowej jest równa:
Stąd
10. Roztwór (mieszanina) gazów doskonałych podlega prawu Daltona, które mówi, że:
ciśnienie wywierane przez mieszaninę gazów jest równe sumie ciśnień cząstkowych wywieranych przez składniki mieszaniny, gdyby każdy z nich był umieszczony osobno w tych samych warunkach objętości i temperatury.
11. Do zamkniętego, beztarciowego układu termodynamicznego dostarczono 1000 [J] ciepła a układ wykonał (oddał na zewnątrz) pracę 400 [J]. Zgodnie z umową znaków ciepło doprowadzone i praca odprowadzona są dodatnie. Zatem, energia wewnętrzna układu:
wzrosła o 600 J
12. Energią wewnętrzną u oraz entalpię i każdego czynnika termodynamicznego wiąże równanie Gibbsa o następującej postaci:
i=u+pv
13. Skoro przyrost energii wewnętrznej gazu doskonałego du = cvdT to przyrost entalpii tego gazu można wyrazić wzorem:
di=cpdT
14. W przemianie izotermicznej gazu doskonałego dla ciepła przemiany qc, pracy bezwzględnej l, pracy technicznej lt oraz przyrostu energii wewnętrznej ∆u i entalpii ∆i obowiązują relacje:
du=cvdT=0
di=cpdT=0
qc=l=lt
15. Równanie przemiany izobarycznej gazu doskonałego pomiędzy stanami 1 i 2 może mieć postać:
16. Równanie przemiany izochorycznej gazu doskonałego pomiędzy stanami 1 i 2 może mieć postać:
17. W przemianie izentropowej gazu doskonałego dla ciepła przemiany qc, pracy bezwzględnej l, pracy technicznej lt obowiązują relacje:
dqc=du+dl=0
dqc=di+dlt=0
lt1-2= κ∙l
18. Proszę wskazać jedyne sformułowanie zgodne z II Zasadą Termodynamiki:
Perpetum mobile drugiego rodzaju jest niemożliwe.
Ciepło nie może przepływać od ciała o temperaturze niższej do ciała o temp. wyższej.
W układzie termodynamicznie izolowanym w dowolnym procesie entropia nigdy nie maleje.
19. Układ termodynamiczny zawiera 10 [kg] gazu doskonałego. W trakcie przemiany izotermicznej przy temperaturze 300 [K] entropia gazu wzrosła o 3 [kJ/(kg·K)]. Oznacza to, że:
Np. że do układu dostarczono 300 [K]∙ 3[kJ/(kg·K)]∙10 [kg]=9000 kJ energii, co oznacza że układ wykonał pracę równą tej energii
20. Pompa ciepła i ziębiarka realizują lewobieżny, odwracalny obieg Carnota. Oba urządzenia pobierają ciepło z dolnego źródła o temperaturze Td = 300 [K] i oddają do górnego źródła o temperaturze Tg = 600 [K]. Zatem między współczynnikami efektywności ziębiarki εzc i pompy ciepła εpc istnieje relacja:
21. Punkt krytyczny krzywej parowania/kondensacji, to punkt, którego przekroczenie powoduje, że:
Nie istnieje rozgraniczenie między fazą ciekłą i gazową (znika menisk)
22. Pomiędzy punktem pęcherzyków i punktem rosy (w obszarze pary mokrej) konieczny jest dodatkowy parametr opisujący stan termodynamiczny pary, którym jest:
stopień suchości pary:
Mpm = Mww+Mpns
Mpns - masa pary nasyconej suchej
Mpm - masa pary mokrej
Mww - masa wody wrzącej
23. Przemiana izobaryczna jest realizowana całkowicie w obszarze pary mokrej. Jeżeli ciepło doprowadzone do pary w ilości 1800 kJ/kg spowodowało wzrost entropii pary o 4 kJ/(kg·K), to przemiana ta zachodziła przy temperaturze:
T=qc/Δs = 1800/4 = 450 K
24. Ciepło spalania i wartość opałowa paliwa mogą być sobie równe pod warunkiem:
Że nie zawiera ono wody
25. Przepływ energii (ciepła) przez promieniowanie pomiędzy dwoma powierzchniami o danych temperaturach T1 > T2 będzie najbardziej intensywny, gdy powierzchnie te będą rozdzielone:
Substancją o jak największej przepuszczalności promieniowania
NAPĘDY ELEKTRYCZNE
1. Odpowiednikiem masy m[kg] w ruchu obrotowym jest:
Moment bezwładności
2. Momentowi zamachowemu GD2 [Nm2] odpowiada moment bezwładności I[kgm2] równemu:
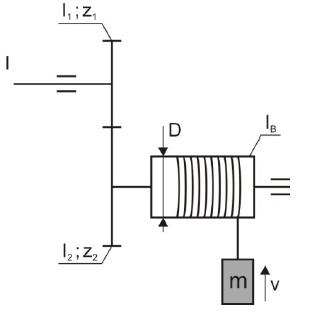
3. Masowy moment bezwładności zredukowany na oś wału I dla układu przedstawionego na rysunku
|
|
i danych:
I1 - masowy moment bezwładności koła zębatego czynnego
z1 - liczba zębów koła zębatego czynnego
I2 - masowy moment bezwładności koła zębatego biernego
z2 - liczba zębów koła zębatego biernego
IB - masowy moment bezwładności bębna
D - średnica bębna
m - masa podnoszonego ciężaru
v - prędkość podnoszenia
4. Ruch obrotowy wokół ustalonej osi opisuje równanie:
Gdzie:
- moment pędu
5. Energia kinetyczna ruchu obrotowego jest równa
6. Równanie ruchu napędu (dynamiki ruchu obrotowego)
7. Charakterystyka mechaniczna silnika synchronicznego oznaczona jest numerem:
1
8. Charakterystyka mechaniczna silnika indukcyjnego oznaczona jest numerem:
2
9. Charakterystyka mechaniczna silnika bocznikowego prądu stałego jest numerem:
3
10. Charakterystyka mechaniczna silnika szeregowego prądu stałego jest numerem:
4
11. Przy wyznaczaniu zastępczego masowego momentu bezwładności korzysta się z:
Zasady zachowania energii
12. W układzie hamulca cięgnowego przedstawionym na rysunku poniżej między
siłami S1 i S2 zachodzi zależność:
13. Przełożenie przekładni przedstawionej na rysunku poniżej wynosi:
i danych:
ω0 - prędkość kątowa wału czynnego,
ω1 - prędkość kątowa wału biernego,
z0 - liczba zębów koła zębatego czynnego,
z1 - liczba zębów koła zębatego biernego,
wynosi:
14. Podstawowym zadaniem przekładni jest:
Zmiana prędkości obrotowej
15. Sprawność jest to:
Iloraz energii wyjściowej do wejściowej
16. Poprawny wykres przebiegu prędkości i przyspieszenia/opóźnienia przedstawia rysunek:
(jeśli chodzi im o ruch jednostajnie przyspieszony)
|
|
|
Prędkość |
Przyspieszenie |
Opóźnienie |
17. Moment hamowania hamulców napędu powinien być równy:
|
18. Sprawność układu przedstawionego na rysunku wynosi:
NAPĘDY I STEROWANIE HYDRAULICZNE I PNEUMATYCZNE
1. W jakim zakresie ciśnień pracują najczęściej typowe układy pneumatyczne?
1,5 - 5bar [ciśnienie robocze jakiegoś siłownika z festo]
2. Jakie maksymalne prędkości ruchu tłoków są stosowane w typowych siłownikach hydraulicznych w porównaniu do pneumatycznych?
Mniejsze (kilkakrotnie mniejsze niż w siłownikach pneumatycznych)
3. Z jaką liczbą dróg stosuje się najczęściej typowe rozdzielacze pneumatyczne?
3 i 5
4. Jak zmienia się lepkość olejów hydraulicznych ze wzrostem ich temperatury?
Lepkość maleje wraz ze wzrostem temperatury
5. Jakie elementy napędowe są najczęściej stosowane w pneumatyce?
Siłowniki tłokowe
6. Jakie prędkości przepływu czynnika roboczego są stosowane w przewodach ciśnieniowych hydraulicznych w porównaniu do pneumatycznych?
kilkakrotnie mniejsze niż w przewodach pneumatycznych
7. Jakimi znakami oznacza się najczęściej główne otwory przyłączeniowe
czterodrogowych rozdzielaczy hydraulicznych?
A, B, P i T
8. Jaki zawór ciśnieniowy jest stosowany najczęściej w pneumatyce?
Zawór redukcyjny/ bądź zawór (regulator) ograniczający ciśnienie
9. Na jakie maksymalne ciśnienie produkowane są najczęściej współczesne typowe zawory hydrauliki przemysłowej?
Ciężkie pytanie, znalazłem zawory, które miały ciśnienie max. 200 - 700bar czyli odpowiedź 32MPa chyba jest okay. (10MPa=100bar)
10. Które z wymienionych rozdzielaczy hydraulicznych są najczęściej stosowane?
rozdzielacze suwakowe.
11. Z jaką liczbą dróg stosuje się najczęściej typowe rozdzielacze suwakowe w hydraulice przemysłowej?
„Podejrzewam” że czterodrogowe.
12. Jakie zawory są stosowane do nastawiania natężenia przepływu sprężonego powietrza?
Tylko Zawory dławiące (dławiki)
13. Jakie zawory hydrauliczne są stosowane do nastawiania natężenia przepływu cieczy roboczej?
Zawory dławiące, regulatory przepływu i synchronizatory prędkości.
14. W jaki sposób można najprościej zmienić wydajność zakupionej hydraulicznej pompy zębatej?
Przez zmianę prędkości obrotowej z jaką jest napędzana.
15. Jaka jest rola filtrów w układach hydraulicznych?
Do oczyszczania cieczy roboczej z zanieczyszczeń.
16. Jaki zawór ciśnieniowy jest najczęściej stosowany w hydraulice?
„Zapewne” chodzi o zawór maksymalny (lub też suwakowe)
17. Jakie prędkości obrotowe rozwijają (orientacyjnie) hydrauliczne silniki wysokomomentowe?
150 - 200 [obr/min] (niskomomentowe nawet do 3000[obr/min])
18. Jakie mogą być minimalne prędkości obrotowe wirników hydraulicznych pomp wyporowych, zapewniające ich prawidłową pracę?
19. Jakie pompy należą wyłącznie do grupy pomp o stałej objętości geometrycznej?
Pompy zębate i śrubowe
20. Jakie jest podstawowe kryterium klasyfikacyjne hydraulicznych siłowników tłokowych?
Rozwiązanie konstrukcyjne, ale ciężkie pytanie.
21. Jakie jest podstawowe przeznaczenie zaworów odcinających?
Umożliwienie swobodnego przepływu cieczy przez przewód lub szczelne jego zamknięcie.
22. Jakie jest przeznaczenie zaworów maksymalnych?
Zabezpieczenie układu przed wzrostem ciśnienia ponad dopuszczalną wartość.
23. Jakie jest podstawowe przeznaczenie rozdzielaczy hydraulicznych?
- doprowadzenie i odprowadzenie cieczy z gałęzi układu hydrostatycznego
- połączenie silnika hydraulicznego lub siłownika z pompą i zbiornikiem (czyli do sterowania pracą silnika lub siłownika)
24. Jakie jest podstawowe przeznaczenie akumulatorów hydraulicznych?
Gromadzenie cieczy pod ciśnieniem w okresach zmniejszonego zapotrzebowania i oddawanie jej do układu w okresach zwiększonego zapotrzebowania.
25. Jakie jest przeznaczenie zaworów zwrotnych?
Zadaniem zaworów zwrotnych jest umożliwienie swobodnego przepływu cieczy w jednym kierunku i samoczynne odcięcie przepływu w kierunku przeciwnym.
26. Jakie jest przeznaczenie zaworów dławiących?
Zadaniem każdego zaworu dławiącego jest nastawianie natężenia przepływu cieczy roboczej podawanej do odbiornika.
27. Jakie jest przeznaczenie regulatorów przepływu?
Zadaniem każdego regulatora przepływu jest na ogół nastawianie i stabilizacja natężenia przepływu cieczy podawanej do odbiornika.
28. Jakie jest przeznaczenie zaworów redukcyjnych?
Zadaniem zaworów redukcyjnych jest redukcja i stabilizacja ciśnienia cieczy opuszczającej zawór, a więc przeciwdziałanie wahaniom ciśnienia w otoczeniu zaworu.
29. Jakie pompy hydrauliczne mogą być budowane zarówno na stałą, jak i zmienną wydajność?
Pompy zębate i śrubowe budowane są wyłącznie jako jednostki o stałej wydajności, natomiast pozostałe typy pomp mogą być budowane w obu wariantach, a więc o stałej lub o zmiennej (nastawialnej) wydajności.
(dodatek) Podział pomp:
1. Pompy o ruchu obrotowym elementów wyporowych (rotacyjne).
1.1. Pompy zębate.
1.2. Pompy śrubowe.
1.3. Pompy łopatkowe.
2. Pompy o ruchu posuwisto-zwrotnym elementów wyporowych (wielotłoczkowe).
2.1. Pompy promieniowe.
2.2. Pompy osiowe.
30. Jakie są możliwości zmiany wydajności pompy wielotłoczkowej promieniowej?
„ciężkie pytanie”, wg mnie można zmienić prędkość obrotową i mimośrodowość, ale ciekawe, z jakimi oni odpowiedziami wyskoczą (pewnie będzie a- ciastko b- penis c- zmiana mimośrodowości d- czekolada) (na pewno zmiana kąta wirnika czy kąta tarczy to błędna odpowiedź, bo tak można zmieniać wydajność w pompach osiowych!)
AUTOMATYKA
1. Jakiego rodzaju sygnały wymuszające są stosowane przy wyznaczaniu charakterystyk
czasowych elementów (członów) i układów automatyki?
Sygnał impulsowy, sygnał skokowy
2. Jakie twierdzenie stosuje się do wyznaczenia transformaty sumy funkcji czasu?
Jeśli funkcje czasowe f1(t), f2(t) mają transformaty F1(s), F2(s), to sumie tych funkcji czasowych pomnożonych przez stałe współczynniki a1, a2 odpowiada suma funkcji operatorowych pomnożonych przez te współczynniki.
Jeżeli f(t) = a 1 f 1(t) + a 2 f 2(t)
To F(s) = a 1 F1(s) + a 2 F2(s)
3. Ile wynosi transformata splotu dwóch funkcji czasu mających znane transformaty?
Iloczyn tych transformat
4. Jaką zależność przedstawia transmitancja operatorowa (funkcja przejścia) elementu (członu) lub układu automatyki?
Stosunek transformaty Laplace'a sygnału wyjściowego Y(s) do transformaty
Laplace'a sygnału wejściowego X(s).
5. Jaką postać ma mianownik transmitancji elementu (członu) inercyjnego 1 rzędu?
Ts + 1
6. Jaką postać ma mianownik transmitancji elementu (członu) inercyjnego 2 rzędu?
(1 + s*Ta)(1+s*Tb)
7. Jakim elementem (członem) jest obiekt z samowyrównaniem?
Całkującym
8. Jaka jest zależność pomiędzy odpowiedzią impulsową a skokową elementu (członu) lub układu automatyki?
Jeden jest całką drugiego: Transformata impulsu = 1; Skoku = 1/s
9. Jakie parametry (współczynniki) zawiera transmitancja operatorowa członu inercyjnego 1 rzędu?
k / (1+s*T); gdzie k to wzmocnienie, a T stała czasowa inercji
10. Jakie parametry (współczynniki) zawiera transmitancja operatorowa członu idealnie całkującego?
k / s; tylko wzmocnienie
11. Jakim elementem ze względu na rząd równania, jest element całkujący rzeczywisty?
Elementem drugiego rzędu
12. Jakie parametry (współczynniki) zawiera transmitancja operatorowa elementu (członu) oscylacyjnego 2 rzędu?
k / (T2*s2 + CTs+1); gdzie k - wzmocnienie, T - okres drgań, C - tłumienie
13. Jaką odpowiedź na skokowy sygnał wejściowy generuje element (człon) inercyjny 1 rzędu, z uwagi na amplitudę drgań?
14. Jaką odpowiedź na skokowy sygnał wejściowy generuje element (człon) oscylacyjny 2 rzędu, mający liczbę tłumienia 0< <1, z uwagi na amplitudę drgań?
15. Co powoduje zwiększenie liczby tłumienia w transmitancji elementu (członu)
oscylacyjnego 2 rzędu z wartości np. 0.1 do wartości 0.4 w odniesieniu do
przeregulowania czasowej charakterystyki skokowej?
Zmniejsza przeregulowanie (rysunek powyżej)
16. W jakim przypadku element (człon) oscylacyjny 2 rzędu ma charakterystykę skokową o drganiach tłumionych?
Dla współczynnika tłumienia z zakresu (0,1).
17. Z jakiego zbioru charakterystyk czasowych powstaje charakterystyka częstotliwościowa elementu (członu) lub układu?
Odpowiedź skokowa oraz odpowiedź impulsowa.
18. Jaki kształt ma odpowiedź skokowa elementu (członu) idealnie całkującego?
19. Jaką wartość w stanie ustalonym przyjmuje odpowiedź skokowa rzeczywistego
elementu (członu) różniczkującego?
W stanie ustalonym wartość jest równa 0
20. Czy sygnał wyjściowy z otwartych układów sterowania wykorzystywany jest do
poprawy jakości odpowiedzi tych układów, jeśli tak, to w jaki sposób?
NIE
21. Czy sygnał wyjściowy z układów regulacji wykorzystywany jest do poprawy
jakości odpowiedzi tych układów, jeśli tak, to w jaki sposób:
TAK, poprzez ujemne sprzężenie zwrotne
22. Jakie sprzężenie zwrotne występuje zwykle w układach regulacji?
Ujemne sprzężenie zwrotne.
23. Co to jest uchyb regulacji w układach z jednostkowym sprzężeniem zwrotnym?
Różnica między wartością zadaną sygnału, a wartością sygnału wyjściowego.
24. Jak wyznaczamy transmitancję zastępczą dwóch elementów (członów) połączonych szeregowo?
25. Jak wyznaczamy transmitancję zastępczą dwóch elementów (członów) połączonych równolegle?
26. Czym charakteryzuje się sygnał wyjściowy stabilizacyjnych (stałowartościowych)
układów regulacji?
Charakteryzuje się utrzymywaniem stałej wartości wielkości regulowanej.
Wartość zadana w = const.
27. Czym charakteryzuje się sygnał wyjściowy nadążnych układów regulacji?
Charakteryzuje się zmianami w sposób niezdeterminowany
28. Do czego można wykorzystać charakterystykę amplitudowo-fazową układu otwartego?
Do określenia stabilności układu zamkniętego (korzystając z kryterium Niquist'a). Układ jest stabilny, jeśli charakterystyka nie obejmuje punku (-1; j0)
29. Jaki jest warunek konieczny i wystarczający stabilności asymptotycznej układu regulacji, nałożony na pierwiastki równania charakterystycznego?
Wszystkie pierwiastki rzeczywiste oraz części rzeczywiste pierwiastków
urojonych muszą być ujemne.
30. Jaki warunek obowiązuje w kryterium stabilności Nyquista?
31. W jakim celu stosuje się regulatory w układach regulacji?
W celu porównania wartości zadanej w(t) z sygnałem regulowanym i wytworzenia sygnału regulacji u(t) wg. danego algorytmu.
32. W jakim miejscu układu regulacji należy umieścić regulator?
Regulator łączy się szeregowo z obiektem tak aby cały układ tworzył pętlę ujemnego sprzężenia zwrotnego.
33. W jakim miejscu układu regulacji należy umieścić człon pomiarowy?
Równolegle do regulatora i obiektu. Na samej linii powrotu sygnału pętli
sprzężenia zwrotnego.
34. Jak brzmi zasada superpozycji?
Odpowiedź obwodu elektrycznego lub jego gałęzi na kilka wymuszeń (pobudzeń) równa się sumie odpowiedzi (reakcji) na każde wymuszenie z osobna. Obwód elektryczny pracujący w stanie ustalonym zgodnie z zasadą superpozycji nazywamy liniowym.
35. Kiedy element (człon) lub układ regulacji nazywamy liniowym?
Kiedy pracuje zgodnie z zasadą superpozycji.
36. Czy można wprowadzić zmiany do schematu blokowego zawierającego dwa
elementy (człony) liniowe połączone szeregowo?
liniowe połączone szeregowo?
Tak, np. można zamienić je miejscami
37. Jakie ujemne sprzężenie zwrotne nazywamy sztywnym?
Sprzężenie w którego torze występuje człon proporcjonalny.
38. Jakie ujemne sprzężenie zwrotne nazywamy elastycznym (podatnym)?
Sprzężenie w którego torze występuje człon różniczkujący.
39. Jakie pierwiastki równania charakterystycznego powodują w charakterystyce
czasowej układu regulacji drgania o stałej amplitudzie i częstotliwości?
Pierwiastki rzeczywiste i rzeczywiste części pierwiastków zespolonych powinny
być ujemne.
40. Na czym polega linearyzacja modelu matematycznego?
To proces tworzenia modelu liniowego, który aproksymuje model nieliniowy.
METROLOGIA I TECHNIKI POMIAROWE
1.Wykonano pomiary trzech sił uzyskując przy pomiarze każdej z nich następujące wartości błędów bezwzględnych granicznych i względnych :
Pomiar 1 - Δ = 0.03 [N], δ = 0.3,
Pomiar 2 - Δ = 0.3 [N], δ = 0.03,
Pomiar 3 - Δ = 1 [N], δ = 0,03.
Porównaj dokładność wykonanych pomiarów zaznaczając wybraną odpowiedź.
Dokładność pomiarów:
Pomiar 1 > Pomiar 2 > Pomiar 3
2. Wykonano pomiary długości trzech odcinków uzyskując w każdym pomiarze następujące wartości błędów bezwzględnych granicznych i względnych :
Pomiar 1 - Δ = 0.01 [mm], δ = 0.1,
Pomiar 2 - Δ = 0.1 [mm], δ = 0.01,
Pomiar 3 - Δ = 1 [mm], δ = 0.1.
Porównaj dokładność wykonanych pomiarów zaznaczając wybraną odpowiedź.
Dokładność pomiarów:
Pomiar 1 > Pomiar 2 > Pomiar 3
3. Jakiej wartości krotności 10 odpowiada przedrostek „piko” rozszerzający zakres jednostki?
0,000 000 000 001 = 10-12
4. Jakiej wartości krotności 10 odpowiada przedrostek „hekto” rozszerzający zakres jednostki?
100 = 102
4. Jaka jest jednostka miary ciśnienia?
(Pascal)
1 hPa = 100 Pa = 1 mbar = 10,19 mmH2O
6.Jaka jest jednostka miary momentu siły?
Niutonometr, N · m - jednostka momentu siły w układzie SI.
1 N · m = 1 N · 1 m = 1 m2 · kg · s-2.
7. Do wyznaczania wartości jakich błędów wykorzystuje się rachunek prawdopodobieństwa?
Rachunek prawdopodobieństwa wykorzystuje się do wyznaczania wartości błędów przypadkowych (losowych).
8. Do wyznaczania wartości jakiego błędu wykorzystuje się metodę różniczki zupełnej?
Metodę różniczki zupełnej wykorzystuje się do wyznaczania wartości błędu granicznego.
9. Liniowy przetwornik pomiarowy przekształca temperaturę Θ (sygnał wejściowy) na napięcie U (sygnał wyjściowy). Zmierzonej wartości U = 2 [mV] odpowiada temperatura Θ = 500 [K]. Jaka jest czułość S tego przetwornika?
Czułość to stosunek sygnału wyjściowego do wejściowego, zatem:
10. Jak się zmieni wartość czułości S liniowego przetwornika pomiarowego przy dwukrotnym zwiększeniu wartości sygnału wejściowego?
We wzorze na czułość sygnał wejściowy jest w mianowniku, więc:
Wartość czułości S zmaleje dwukrotnie.
11. Jaki przetwornik służy do pomiaru ciśnienia?
Barometr - ciśnienie atmosferyczne.
Manometr - ciśnienie względne i bezwzględne.
Są to przetworniki pierwszego rzędu.
12. Na podstawie jakiej charakterystyki wyznacza się szerokość pasma przenoszonych częstotliwości przez przetwornik I-go rzędu?
Szerokość pasma przenoszonych częstotliwości dla przetwornika I-go rzędu wyznacza się na podstawie charakterystyki amplitudowo - częstotliwościowej.
13. Od czego zależy szerokość pasma częstotliwości przenoszonych przez przetwornik I-go rzędu?
Szerokość pasma częstotliwości przenoszonych przez przetwornik I-go rzędu zależy od
stałej czasowej T.
14. Od czego zależy wartość błędu dynamicznego?
Wartość błędu dynamicznego zależy od własności przetwornika jak i własności sygnału wejściowego.
15. Od czego zależy błąd kwantyzacji?
Błąd kwantyzacji zależy od dokładności zaokrąglania przy przekształcaniu sygnału analogowego na cyfrowy.
MASZYNY I URZĄDZENIA TECHNOLOGICZNE
1. Prasa walcowa służy do:
zagęszczania surowców sypkich, pyłów
2. Moment oporu brykietowania w prasie walcowej nie zależy od:
moment oporu to
gdzie: N=Psil·η,
3. Jeżeli moc na wale walca roboczego obracającego się z prędkością obrotową n = 5 obr/min wynosi 50 kW to moment oporu posiada następującą wartość:
9,55 [Nm]
4. Na wydajność granulatora talerzowego ma wpływ m.in.:
średnica talerza, prędkość obrotowa i kąt pochylenia
5. Kruszarki szczękowe o prostym ruchu szczęki służą do rozdrabniania:
materiałów twardych o dużej wytrzymałości na zgniatanie, materiałów o małej i średniej podatności na rozdrabnianie (granit, bazalt, porfir)
6. Efektywność rozdrabniania w kruszarkach wirnikowych młotkowych zależy przede wszystkim od:
właściwości rozdrabnianego materiału, liczby obrotów wirnika, jego wymiarów, kształt i masy młotków
7. Wydajność maszyny kruszącej to:
stopień rozdrobnienia materiału
8. Prędkość obrotowa komory młyna grawitacyjnego zależy od:
Średnicy młyna, wielkości nadawy
9. Jednokomorowy młyn obrotowo-wibracyjny z dwumasowym wibratorem jest maszyną wibracyjną:
młyn z mielnikami swobodnymi z przekazywaniem energii przez komorę nadrezonansową.
10. Sprawność maszyny mielącej w czasie mielenia jest:
całką
MASZYNY I URZĄDZENIA ENERGETYCZNE
1. Sprawność obiegu Carnota wyraża wzór:
2. Jakie przemiany tworzą obieg Carnota?
Sprężanie adiabatyczne i izotermiczne oraz rozprężanie adiabatyczne i izotermiczne
3. Jeżeli temperatura górnego źródła ciepła wynosi t1 = 727°C, a dolnego t2 = 227°C to sprawność porównawczego obiegu Carnota jest równa
0,688°C
4. Obiegiem porównawczym elektrowni parowej jest:
Rankine'a
5. Proces ekspansji w doskonałej turbinie opisuje przemiana:
izentropowa
6. Izentropowy spadek entalpii w turbinie wynosi Δi = 500 kJ/kg, strumień pary
D = 360 t/h. Jaka jest moc wewnętrzna turbiny?
7. Izentropowy spadek entalpii w turbinie wynosi Δi = 500 kJ/kg, strumień pary
D = 360 t/h, sprawność wewnętrzna turbiny ηiT = 0,8. Jaka jest moc na wale turbiny?
8. Sprawność wewnętrzna turbiny jest definiowana jako:
stosunek pracy uzyskanej w turbinie rzeczywistej do pracy uzyskanej w turbinie doskonałej
9. Sprawność termodynamiczna porównawczego obiegu elektrociepłowni z turbiną
przeciwprężną przy pominięciu pracy pompowania wynosi:
10. Głównym zadaniem elektrociepłowni jest zaspokojenie potrzeb odbiorców na
energię w postaci ciepła i energię elektryczną
11. Zadaniem chłodni kominowej w elektrowni jest:
chłodzenie wody obiegowej podgrzanej w skraplaczu
12. Przeponowe wymienniki ciepła o ustalonym przepływie ciepła to:
rekuperatory
13. Moc cieplną wymiennika ciepła określa zależność:
14. Współczynnik przenikania ciepła k określa:
15. Średnią logarytmiczną różnicę temperatur w wymienniku ciepła obliczamy za
pomocą wzoru:
16. Jaka będzie powierzchnia wymiany ciepła w wymienniku o mocy cieplnej
, współczynniku przenikania ciepła k = 200 W/(m2K), średniej logarytmicznej różnicy temperatur ΔTm = 25 K?
2m2
17. Średnica krytyczna izolacji cieplnej to średnica, przy której:
minimalny opór cieplny oraz maksymalny strumień ciepła
18. Jaka jest gęstość strumienia przewodzonego ciepła przez ścianę o grubości δ = 15 cm jeżeli różnica temperatur między powierzchniami wynosi Δt = 20 K, współczynnik przewodzenia ciepła materiału ściany λ = 0,30 W/(mK)
19. Gęstość strumienia przewodzonego ciepła w cylindrycznej przegrodzie 2 -warstwowej opisuje zależność (Ts1, ts1, Ts2, ts2, Ts3, ts3 - temperatury na poszczególnych powierzchniach, d1, r1, d2, r2, d3, r3 - odpowiednio średnice i
promienie, λ1, λ2 - współczynniki przewodzenia ciepła pierwszej i drugiej warstwy):
20. Ile wynosi wartość współczynnika przenikania ciepła jeżeli grubość ściany wynosi
δ = 10 cm, współczynnik przewodzenia ciepła materiału ściany λ = 0,5 W/(mK),
współczynniki przejmowania ciepła α1 = 10 W/(m2K), α2 = 5 W/(m2K)
21. Gęstość strumienia przejmowanego ciepła określa prawo Newtona:
W warunkach ustalonych
22. Wartość współczynnika przejmowania ciepła α określa się na podstawie:
prawa Newtona, liczby Nusselta
23. Do wyznaczenia współczynnika przejmowania ciepła α konieczna jest znajomość
liczby Nusselta, którą określa zależność definicyjna:
Stosunek charakterystycznego wymiaru liniowego l do grubości hipotetycznej warstwy przyściennej λ/α
24. Gęstość strumień ciepła przepływającego między dwoma powierzchniami w
wyniku promieniowania określa zależność:
25. Ciało doskonale czarne to ciało, które w sposób doskonały:
Pochłania energię(promieniowanie) R=P=0 A=1
26. Sprawność kotła energetycznego określa stosunek:
27. Pośrednia metoda wyznaczenia sprawności kotła energetycznego jest opisana
zależnością:
28. Strata kominowa jest związana z:
Strumieniem ciepła traconego do otoczenia ze spalinami o wysokiej temperaturze(gorące spaliny)
29. Spalanie całkowite jest wtedy, kiedy w produktach spalania:
nie ma wolnego węgla i siarki
30. Spalanie zupełne jest wtedy, kiedy w produktach spalania
Nie ma gazowych składników palnych(np.CO,H2,Ch4)
31. Jaka jest sprawność kotła energetycznego ηk, jeżeli w kotle wytwarzany jest
strumień pary wodnej D= 360 t/h, przyrost entalpii pary w kotle ΔiD = 2000 kJ/kg. Strumień paliwa spalanego w kotle B = 25 kg/s, wartość opałowa paliwa Qj = 10 MJ/kg.
ηk = 0,80
32. Jaki jest strumień paliwa B spalanego w kotle, jeżeli w kotle wytwarzany jest
strumień pary wodnej D= 360 t/h, przyrost entalpii pary w kotle ΔiD = 2000 kJ/kg, sprawność kotła energetycznego ηk = 0,80. Wartość opałowa paliwa Qj =10 MJ/kg.
B = 25 kg/s
33. Jaki jest strumień pary D wytwarzanej w kotle, jeżeli w kotle spalany jest strumień paliwa B= 25 kg/s o wartość opałowa paliwa Qj = 10 MJ/kg. Przyrost entalpii pary w kotle ΔiD = 2000 kJ/kg, sprawność kotła energetycznego ηk =0,80.
D= 360 t/h
34. Czy maszyny przepływowe służą do transportu masy płynu:
tak np. pompy
35. Czy podstawowe równanie maszyn przepływowych jest:
Eulera
36. Która z siła działających na element płynu w kanale międzyłopatkowym koła
wirnikowego ma decydujące znaczenie na przyrost ciśnienia w tym kanale:
37. Czy przyrost ciśnienia całkowitego w wentylatorze promieniowym, dla którego
podciśnienie na ssaniu wynosi 20 mm H2O, nadciśnienie na tłoczeniu 180 mm
H2O a ds= dt wynosi:
1962 Pa
38. Czy moc użyteczna wentylatora, którego Δpc = 3000 Pa, wydajność Vs = 720
m3/h wynosi:
600[W]
MASZYNY I URZĄDZENIA TRANSPORTOWE
1. Wykorzystanie tylko jednej zunifikowanej jednostki ładunkowej w procesie przemieszczania środkami transportu nosi nazwę transportu:
transport intermodalny
2. Czy pojęcie dźwignice obejmują:
Pytanie na tyle ogólne, że proponuje podział dźwignic:?
-dźwignice
-cięgniki
-wózki
-suwnice
-przesuwnice, obrotnice, wywrotnice
-wspornice
-żurawie
3. Wydajność techniczna środka transportu (dźwignicy) zależy od:
Wydajność teoretyczna:
gdzie: mu - masa użyteczna ładunku w t (wielkość masy ładunku nie jest jednoznaczna z masą podnoszoną0), i=3600/T - liczba cykli roboczych na godzinę, T=Tp + Tm - czas jednego cyklu w s,
- suma czasów tp przemieszczania ładunku w cyklu w s, l- długość częściowych dróg przemieszczania w m, v-prędkość przemieszczania na odpowiedniej części drogi w m/s, Tm=∑tm manipulacji ładunkowych w cyklu w s.
Wydajność teoretyczna dźwignic zależy od:
-masy przenoszonego ładunku
-sumy czasu manipulacji
-długości dróg przemieszczania ładunków
-prędkości przemieszczania ładunków
Wydajność techniczna:
Wydajność techniczna nośnika bliskiego zależy od:
-stopnia wykorzystania udźwigu lub stopnia wypełnienia przenośnika
k1=0,3÷1 - stopień wykorzystania udźwigu lub stopień wykorzystania przenośnika.
4. Najmniejszą szerokość korytarza komunikacyjnego w magazynach można uzyskać w rezultacie zastosowania:
5. Jaki maksymalny ładunek (kN) może być przemieszczany z użyciem suwnicy o udźwigu Q=320 kN z zastosowaniem elektromagnesu o Qo=20kN.
Q-Q0 = 320 [kN] - 20 [kN] = 300 [kN]
6. Grupa natężenia pracy w dźwignicach jest miarą ich:
Grupę natężenia pracy dźwignicy i jej głównego mechanizmu podnoszenia o napędzie silnikowym określa:
-liczba zmian obciążeń występujących w okresie eksploatacyjnym
-zmienność tych obciążeń odniesiona do obciążenia nominalnego
Miarą zmienności obciążeń jest średni stopień wykorzystania udźwigu wyrażony przez obciążenie względne.
7. Do analizy pary styku koła walcowego środka transportu i szyny jezdnej o główce płaskiej zastosowanie ma rozkład:
Rozkład na bazie nacisków Hertza. (rozkład nacisków w miejscu styku ciał sprężystych).
8. Z uwagi na jaki parametr dobiera się z katalogów silnik w mechanizmach ruchu środków transportu:
Zapotrzebowanie mocy, obroty i względny czas pracy
9. Który wymieniony środek transportu w rezultacie przebudowy mechanizmu jazdy jest przedmiotem odbioru uprawnionego urzędu dozoru technicznego
10. Jakie zespoły mechanizmu jazdy suwnicy pomostowej wymagają sprawdzenia na grzanie podczas projektowania:
Silnik i hamulec.
11. Podać warunek transportu grawitacyjnego (α - kąt nachylenia powierzchni transportowej względem poziomu; μ - współczynnika tarcia ciała):
12. Jakie są właściwe relacje:
13. Kiedy występuje zmienne co do wartości przyspieszenie pojazdu w jego ruchu ustalonym na płaszczyźnie poziomej?
Gdy obiekt porusza się po krzywej i przyśpieszenie dośrodkowe jest różne od 0
ponieważ ruch ustalony to taki ruch w którym żaden z parametrów nie jest zależny od czasu, a więc:
v = const,
aliniowe = const,
adośrodkowe = v2/r - zakładając, że prędkość jest stała to zmienny musi być promień
14. Wytrzymałość jednostkową taśmy wyrażamy np. w:
kN/m
15. Przy jakich założeniach jest słuszny wzór na tarcie cięgien?
Po raz kolejny w grę wchodzi wzór Eulera.
Przy założeniu, że cięgno jest:
-idealnie wiotkie
-nieważkie
-nierozciągliwe
16. Kiedy samochód może pokonać nachylenie drogi ze stała prędkością ?
występuje równowaga sił ciągu i oporów ruchu, przyśpieszenie a = 0, silnik pracuje ze stałą mocą
17. W jakich jednostkach wyrażamy pracę środków transportu?
[m3/h] lub [T/h]
18. Z jaką mocą pracuje wyciąg podnosząc ze stałą prędkością ładunek o masie 1 Mg na wysokość 10 m w czasie 1 s?
m=1[Mg]=1 000 000 [g]=1000 [kg]
a=10 [m/s2]
s=10 [m]
t=1[s]
19. Od czego zależą siły sprzężenia ciernego taśmy z bębnem napędowym przenośnika?
Zasada sprzężenia ciernego opiera się na wzorze Eulera, z którego wynika, że sprzężenie cierne zależy od:
-współczynnika tarcia między taśmą a bębnem
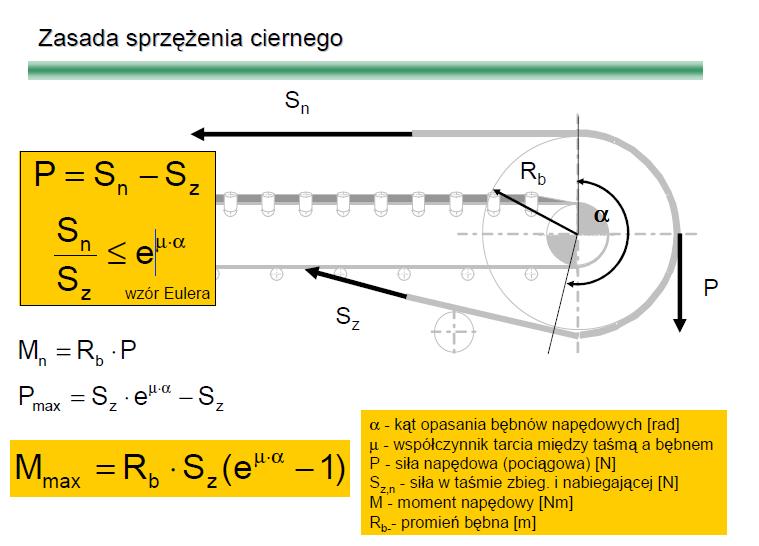
-kąta opasania bębna
Ponadto:
20. Kiedy sprzęgło hydrokinetyczne w napędzie przenośnika podczas pracy nie przekazuje żadnego momentu obrotowego
Sprzęgło hydrokinetyczne nie przenosi żadnego momentu obrotowego, gdy pompa i turbina obracają się z tą samą prędkością, ponieważ warunkiem przenoszenia momentu przez sprzęgło hydrokinetyczne jest wystąpienie poślizgu.
21. Lina stalowa to połączenie w jednym obiekcie następujących cech:
-duża sztywność wzdłużna
-mała sztywność poprzeczna
-przenoszą obciążenia wzdłużne
-w niektórych przypadkach także poprzeczne
22. Parametr Rm to wyrażona w jednostkach naprężenia klasa wytrzymałości liny:
na rozciąganie, jest to wartość naprężenia niszczącego drut w doniesieniu do jego pierwotnego przekroju, podana w jednostkach: [MPa] lub [GPa] (gdzie 1[Pa]=1N/m2)
23. Równanie Eulera (T = teμα) pozwala na obliczenie:
Wielkości sprzężenia ciernego, zależnego od współczynnika tarcia oraz kąta opasania. W praktyce służy do wyprowadzenia stopnia pewności przed poślizgiem n.
Równanie Eulera:
Gdzie: T1 - siła po stronie bardziej obciążonej; T2 - siła po stronie mniej obciążonej; α - kąt opasania koła pędnego liną; µ - współczynnik tarcia pomiędzy liną a wykładziną; e - podstawa logarytmu naturalnego.
Stopień pewności przed poślizgiem:
Warunek właściwego sprzężenia ciernego:
24. Liny konstrukcji Seale (S), Warrington (W), Warrington-Seale (WS), Filler (F) to:
liny okrągłosplotkowe, dwuzwite
25. Zaznacz we właściwej kolejności kolejność Dozory Techniczne sprawujące nadzór
nad daną grupą urządzeń transportu linowego:
Koleje linowe i wyciągi narciarskie,
Górnicze wyciągi szybowe, wiertnice naftowe i gazowe,
Dźwigi osobowe, towarowe, urządzenia dźwigowe i dźwignicowe.
Koleje linowe i wyciągi narciarskie - Transportowy Dozór Techniczny - TDT
Górnicze wyciągi szybowe, wiertnice naftowe i gazowe - Wyższy Urząd Górniczy - WUG, oraz Urząd Górniczy do Badań Kontrolnych Urządzeń Energomechanicznych - UGBKUE
Dźwigi osobowe, towarowe, urządzenia dźwigowe i dźwignicowe - UDT
26. Lina nośno-napędowa w kolejach linowych pełni funkcję:
Lina nośno- napędowa czy raczej pętla liny nośno napędowej łączy stacje kolei jednolinowej o ruchu okrężnym i przejmuje zarówno funkcje podtrzymywania, jak i funkcję poruszania urządzeń jezdnych.
27. Moment całkowity rozwijany na wale maszyny wyciągowej to:
Jest to moment liczony dla każdego z przedziałów wykresów jazdy, jest on sumą momentu statycznego, dynamicznego i momentu oporu:
Dzięki niemu można obliczyć moc urządzenia wyciągowego w poszczególnych przedziałach jazdy. Znajomość wielkości momentów całkowitych w poszczególnych przedziałach potrzebna jest do obliczenia momentu zastępczego, potrzebnego do właściwego doboru urządzenia wyciągowego.
28. Współczynniki bezpieczeństwa z jakimi dobierane są liny stalowe to:
Współczynniki określane jako wielokrotność obliczeniowej siły zrywającej linę w całości w odniesieniu do jej obciążenia statycznego:
gdzie: Fonom [N] - obliczeniowa siła zrywająca linę, Fstat [N] - obciążenia pojedynczej gałęzi liny siłą statyczną.
gdzie: Q [kg] - masa użyteczna podnoszona przez linę; q [kg] - masa stała podnoszona przez linę; ml [kg] - masa lin; g [m/s2] - przyspieszenie grawitacyjne; z - liczba lin.
Wartość liczbowa współczynnika bezpieczeństwa dla różnych obiektów transportu linowego zawiera się w przedziale od 3 do 16. Najmniejszą wartość przyjmuje się dla lin odciągowych kotwiących różnego rodzaju budowle i obiekty techniczne. Największą wartość tego współczynnika stosuje się w wielolinowych układach dźwigów osobowych.
29. Liny stalowe podlegają procesom zużyciowym bo:
Liny stalowe podlegają uszkodzeniom normalno - zużyciowym. Przyczyny są następujące:
-zmęczenie materiału drutów ze względu na zmienne rozciąganie, zginanie, skręcanie oraz wywołane złożonym, wieloosiowym stanem naprężeń,
-starzenie ze względu na obciążenia cieplne, pełzanie i relaksację (zużycie to dotyczy lin wykonanych z tworzyw sztucznych),
-korozja o charakterze fizykochemicznym, naprężeniowym lub międzykrystalicznym,
-zużycie frettingowe
-korozja ze względu na lokalizację może być równomierna bądź miejscowa, wewnętrzna oraz zlokalizowana na powierzchni,
-zużycie ścierne charakteryzujące się ubytkami masowymi, ma ono charakter powierzchniowy oraz stykowy.
30. Maksymalna prędkość jazdy w ruchu ustalonym dla transportu urobku w szybach wydobywczych jest ograniczona do 20m/s bo:
Wyższa prędkość stwarzałaby trudności w zapewnieniu właściwego prowadzenia górniczym
1
Wyszukiwarka
Podobne podstrony:
Egzamin Inzynierski wszystko
egzamin inżynierski, GW
ETIlic 2007 pytania kontrolne na egzamin, Inzynieria Materialowa
Zagadnienia do egzaminu inżynierskiego z kierunku zootechnika
8. Rachunek kosztów dla inżynierów, studia AGH, ZiIP, Inżynier, Egzamin inżynierski
SHA, Szkoła, Pytania na egzamin inżynierski
egzamin z inzynierii
Egzamin inżynierski Bryjak
Egzamin inżynierski cz1
7.zagrożenia w miarę, egzamin inzynierski gig
Katedra owoców i warzyw, Studia, Egzamin inżynierski, Owoce i warzywa
pytania do egzaminu, egzamin inzynierski gig
Mieso odpowiedzi, Studia, Egzamin inżynierski, Mięso
odpowiedzi owce trzoda i bydło, Zagadnienia na egzamin inżynierski
Egzamin Klos wszystkie odpowiedzi wersja robocza
więcej podobnych podstron