POLITECHNIKA POZNAŃSKA
Konspekt: Pomiar prędkości obrotowej
LABORATORIUM MECHATRONIKI
1. Cel ćwiczenia:
• zapoznanie sie z najczęściej stosowanymi sposobami pomiaru prędkości obrotowej oraz
używanymi do tego czujnikami.
• wyznaczenie zależności prędkości obrotowej silnika elektrycznego:
o od częstotliwości zasilania silnika elektrycznego,
o od częstotliwości sygnału mierzonego na zaciskach czujnika indukcyjnego PCID,
o od napięcia mierzonego na zaciskach przetwornika prędkości SERIA EE65,
o od napięcia mierzonego na zaciskach prądnicy tachometrycznej.
2. Schemat stanowiska pomiarowego
Prądnica
V
tachometryczna
Czujnik
prędkości
V
Przetwornik
Silnik
przepływu
częstotliwości
elektryczny
Alspa VF
z wentylatorem
Czujnik
Hz
indukcyjny
Tachometr
Obr/
cyfrowy
Hz
min
Obr/
Wykaz aparatury:
min
• Przetwornik częstotliwości Alspa VF 2005,
• Silnik elektryczny z wentylatorem,
• Prądnica tachometryczna,
• Czujnik indukcyjny PCID-2.5ZN,
• Czujnik prędkości przepływu E65,
• Multimetr WENS 53,
• Tachometr cyfrowy z możliwością pomiaru laserowego i stykowego,
• Oscyloskop OWON PDS 5022S.
3. Budowa i zasada działania elementów użytych do budowy stanowiska
Silnik elektryczny asynchroniczny
Silnik elektryczny asynchroniczny jest maszyną elektryczną zmieniającą energię elektryczną w
energię mechaniczną, w której wirnik obraca się z poślizgiem w stosunku do wirującego pola magnetycznego wytworzonego przez uzwojenia stojana.
Silnik asynchroniczny składa się z 2 podstawowych części: nieruchomego stojana i ruchomego
wirnika. Przemienny prąd w symetrycznym trójfazowym uzwojeniu stojana powoduje powstanie
zmiennego pola magnetycznego dla każdej z faz w taki sposób, że wypadkowe pole jest polem wirującym. Pole to w wyniku indukcji elektromagnetycznej (stąd inna nazwa silnika silnik
1

indukcyjny) powoduje powstanie siły elektromotorycznej w uzwojeniach wirnika, pod wpływem
której płynie przez uzwojenia wirnika prąd elektryczny. Oddziaływanie pól magnetycznych stojana
i wirnika wywołuje powstanie momentu elektromagnetycznego i ruch.
Uzwojenia wirnika mogą być wewnętrznie połączone (zwarte - silnik zwarty) lub ich końcówki
są przyłączone do pierścieni ślizgowych przekazujących przez szczotki prąd na zewnątrz silnika (silnik pierścieniowy). Wyprowadzone na zewnątrz uzwojenia są połączone przez oporniki lub zwarte. Oporniki podłącza się na czas rozruchu silnika, następnie zmniejsza się opór i zwiera uzwojenia. Oporniki ograniczające prąd uzwojeń wirnika stosuje się w celu zwiększenia momentu
obrotowego i zmniejszenia prądu pobieranego przez silnik szczególnie podczas rozruchu silnika lub w celu uzyskania łagodnego startu silnika.
W sieci energetycznej w Polsce prąd elektryczny ma częstotliwość 50 Hz co odpowiada
prędkości synchronicznej 3000 obrotów na minutę, a obroty znamionowe silnika asynchronicznego
2800 - 2900 obr/min. Najpopularniejsze są silniki o dwóch parach biegunów, których obroty synchroniczne wynoszą 1500 obr/min, zaś znamionowe 1410-1480 obr/min.
Największymi wadami silnika asynchronicznego jest brak bezpośredniej możliwości regulacji
prędkości obrotowej, a w silnikach klatkowych także gwałtowny rozruch.
Dlatego też dawniej stosowano silniki pierścieniowe. Zastosowanie oporników włączanych w
obwód uzwojeń wirnika umożliwiało łagodny rozruch. Obecnie powszechnie stosowanym
rozwiązaniem, mającym na celu ograniczenie prądu podczas rozruchu, jest podłączanie uzwojeń silnika na czas rozruchu w gwiazdę, a po uzyskaniu właściwych obrotów - przełączenie w trójkąt.
Połączenie w gwiazdę zmniejsza moc silnika i może być stosowane także podczas pracy silnika jeżeli nie ma zapotrzebowania na moc.
Regulacji prędkości obrotowej dokonywano dawniej przez łączenie silników pierścieniowych z
prądnicą i silnikiem prądu stałego w układy Leonarda. Rozwiązanie to stosowane było tylko w silnikach dużej mocy. Stosowano też układy uzwojeń, w których w zależności od podłączenia uzyskiwano różną liczbę biegunów, a tym samym i różne obroty. Silniki z takimi układami były stosowane w pralkach automatycznych, uzyskując małe obroty podczas prania a duże podczas
wirowania.
Wraz z rozwojem elektroniki, a w szczególności tranzystorów mocy, triaków i
mikroprocesorów, zaczęto stosować układy łagodnego rozruchu (soft start) oraz regulować
prędkość obrotową przemiennikami częstotliwości. Rozwój technologiczny i spadek kosztów
układów falownikowych są przyczyną coraz częstszego stosowania tego typu urządzeń dla
silników klatkowych. Układy z regulacją obrotów, umożliwiają uzyskanie znacznych oszczędności
energii zastępując układy, w których maszyna (pompa, wentylator) pracowała cyklicznie, przepływ
był dławiony lub tracony.
Silniki pierścieniowe dzisiaj są wobec tego coraz rzadziej stosowane.
Elektroniczna przetwornica częstotliwości
Przetwornica częstotliwości jest urządzeniem elektronicznym służącym do zamiany jednego
rodzaju energii elektrycznej na inny (żądany). Zbudowana jest z zasilacza-prostownika
jednofazowego (230V) lub trójfazowego (400V), części sterującej oraz elementów mocy.
2
Zasada działania: przemienne napięcie zasilające jest prostowane w zasilaczu (energia
składowana jest w kondensatorach elektrolitycznych dużej pojemności), następnie napięcie to przekazywane jest do układów wykonawczych-tranzystorów lub częściej zespołów tranzystorów
IGBT.
Układ sterujący ma za zadanie: regulować częstotliwość wyjściową przetwornicy impulsowej
nadzorować takie parametry pracy jak prąd obciążenia, czas narastania i opadania częstotliwości i
napięcia wyjściowego oraz współczynnik mocy odbiornika.
Zastosowanie: regulacja prędkości obrotowej silników elektrycznych, układy nagrzewania
powierzchniowego metali, wzmacniacze klasy D
Przetwornica powinna posiadać funkcje, które umożliwiają pracę w najtrudniejszych
warunkach, takich jak niskie częstotliwości wyjściowe i zmienne obciążenie silnika, aby możliwa
była praca w całym zakresie prędkości obrotowych. Takie funkcje nazywamy kompensacjami, np.:
- kompensacja rozruchu i napięcia rozruchu,
- kompensacja częstotliwości początkowej,
- kompensacja poślizgu,
- kompensacja napięcia wyjściowego w funkcji obciążenia,
- kompensacja strumienia w niedowzbudzonym silniku,
- kompensacja składowej magnesującej prądu obwodowego wirnika.
Kompensacja rozruchu i napięcia rozruchu ma za zadanie zapewnić optymalny strumień
magnesujący wirnika lub strumień w szczelinie i maksymalny moment początkowy przy pracy z niskimi prędkościami za pomocą zwiększenia wartości napięcia wyjściowego przy niskich
częstotliwościach. Kompensacja poślizgu jest funkcją, która umożliwia stabilną pracę układu napędowego w całym zakresie prędkości obrotowej z wykluczeniem częstotliwości
rezonansowych. Polega kontrolowaniu poślizgu przez zwiększanie częstotliwości, proporcjonalnie
do składowej czynnej. Kompensacja napięcia wyjściowego w funkcji obciążenia polega na
dopasowaniu napięcia wyjściowego przetwornicy do zmieniających się warunków obciążenia.
Metoda ta powinna być stosowana tylko w czasie rozruchu silnika, gdy częstotliwość jest niska.
Kompensacja pozwala na maksymalne wykorzystanie właściwości dynamicznych silnika.
Prądnica tachometryczna
Prądnice tachometryczne generują napięcie proporcjonalne do prędkości obrotowej. Zasada
działania opiera się na klasycznej prądnicy prądu stałego, z tą różnicą, że w prądnicach tachometrycznych stosuje się szczotki o małej rezystancji przejściowej (w normalnych prądnicach
szczotki powodują nieliniowość) - dzięki temu uzyskuje się błąd nieliniowości rzędu 1%. Prądnice
tachometryczne sprzęgnięte są z wałem silnika, a napięcie wyjściowe porównywane jest z
napięciem zadającym regulatora.
Pomiary przy pomocy prądnic tachometrycznych są jednak zakłócone przez szumy (działanie
komutatora, zakłócenia zewnętrzne) szczególnie niekorzystne przy małych wartościach prędkości obrotowej, a co za tym idzie niskich napięciach wyjściowych.
Szumy niejednokrotnie dominują nad sygnałem pomiarowym czyniąc go bezużytecznym.
Rozwiązaniem może być zastosowanie magnesów trwałych na wirniku, a uzwojenia umieścić
na stojanie. Jednak nie unikniemy problemów związanych z prostownikami i filtrami (które
dodatkowo wprowadzają opóźnienia). Znowu przy niskich częstotliwościach trudno uzyskać
napięcie stałe na wyjściu.
Czujnik indukcyjny
W indukcyjnych czujnikach zbliżeniowych obwód drgający wraz z cewką tworzy przed
aktywną powierzchnią czujnika zmienne pole elektromagnetyczne. Pojawienie się metalowego
przedmiotu w tym polu powoduje tłumienie sygnału w obwodzie drgającym. Jeżeli tłumienie to przekroczy określoną wartość progową, na wyjście układu podawany jest sygnał przełączający.
3
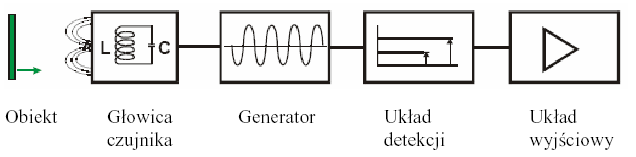
Budowa czujnika indukcyjnego
Część aktywną czujnika indukcyjnego stanowi cewka nawinięta na ferrytowym rdzeniu
kubkowym, wytwarzająca zmienne pole magnetyczne. Zadaniem rdzenia kubkowego, o otwartym
obwodzie magnetycznym, jest wzmocnienie strumienia magnetycznego cewki oraz skierowanie go
w kierunku strefy pomiarowej czujnika.
Układ elektroniczny czujnika określa odległość przedmiotu od cewki, na podstawie stopnia
tłumienia amplitudy i generuje sygnał wyjściowy. Najczęściej jest to sygnał dwustanowy: obiekt jest w zasięgu czujnika lub go nie ma. Może też być to sygnał analogowy, wówczas jest on odwrotnie proporcjonalny do odległości przedmiotu.
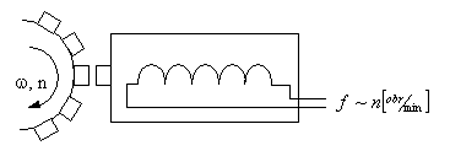
Zasada pomiaru prędkości obrotowej przy użyciu czujnika indukcyjnego.
Koło zębate zmienia wartość indukcyjności - zmiany napięcia wyjściowego (ich częstotliwość
jest proporcjonalna do prędkości obrotowej).
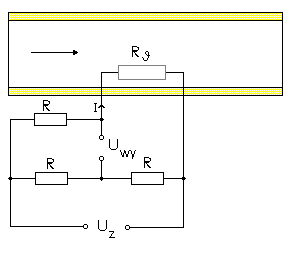
Termoprzepływomierz (termoanemometr)
V
Termorezystor RJ włączony w układ mostka, ogrzewany jest prądem elektrycznym
przepływającym przez niego. Natomiast chłodzony jest przepływającym materiałem (gaz, ciecz).
Przy braku natężenia przepływu temperatura termorezystora ma wartość powyżej temperatury
otoczenia. Przepływający czynnik powoduje obniżenie temperatury termorezystora, co spowoduje
zachwianie stabilności mostka.
Te zmiany możemy obserwować mierząc napięcie przy stałej wartości prądu lub przyrost prądu
potrzebnego do stabilizacji temperatury termorezystora.
4
4. Przebieg ćwiczenia:
Zadając za pomocą przetwornika Alspa VF (potencjometru) częstotliwości zasilania silnika
elektrycznego z zakresu fc = 10 – 50 Hz dokonać pomiaru następujących parametrów:
- napięcie na zaciskach prądnicy tachometrycznej ( Ut)
- napięcie na zaciskach czujnika prędkości przepływu ( Up)
- częstotliwość sygnału na zaciskach czujnika indukcyjnego ( fi)
- prędkości obrotowej za pomocą tachometru laserowego ( Tl)
- prędkości obrotowej za pomocą tachometru stykowego ( Ts)
Przebieg pomiarów:
1. Uruchomić oscyloskop przyciskiem „ POWER” a następnie przycisnąć dowolny przycisk.
Podłączyć przewody oscyloskopu do odpowiednich zacisków pomiarowych.
2. Uruchomić multimetr przyciskiem „ POWER” podłączyć przewody czarny do gniazd „ COM” w multimetrze oraz czerwony do gniazda „ V”. Przełączyć rodzaj pomiaru na napięcie stałe „ DC”
za pomocą przycisku „ AC/DC”. Podłączyć przewody multimetru do zacisków pomiarowych.
3. Podłączyć stanowisko pomiarowe do zasilania (240V) oraz załączyć urządzenie
przełącznikiem znajdującym się na panelu obok zacisków pomiarowych.
4. Ustawić częstotliwość na przetworniku Alspa VF np. 12 Hz (za pomocą potencjometru
znajdującego się na panelu pomiarowym) oraz
a. odczytać częstotliwość sygnału z czujnika indukcyjnego za pomocą oscyloskopu,
b. odczytać napięcie na zaciskach prądnicy tachometrycznej,
c. odczytać napięcie na zaciskach czujnika prędkości przepływu,
d. odczytać wskazania tachometru cyfrowego laserowego,
e. odczytać wskazania tachometru cyfrowego stykowego
5. Punkt 4 powtórzyć 20 razy w całym zakresie częstotliwości.
6. Po wykonaniu pomiarów nastawić częstotliwość przetwornika Alspa VF na 0 Hz oraz
wyłączyć urządzenie przełącznikiem znajdującym się na panelu obok zacisków pomiarowych.
7. Wyłączyć oscyloskop i multimetr oraz rozłączyć przewody pomiarowe.
5. Opracowanie wyników
Na podstawie dokonanych pomiarów wykonać wykresy zależności ω t( fc), ω r( fc), ω r( Ut), ω r( Up).
Tl( fc), Ts( fc). Obliczyć współczynniki korelacji dla otrzymanych charakterystyk.
Prę dkość obrotowa (teoretyczna z uwzględnieniem poślizgu) – obliczamy ze wzoru: fc ⋅ 60
obr
ω
, f
t =
i [ Hz], m – ilość par biegunów w silniku elektrycznym (w tym
1,07142 ⋅ m min
przypadku: 1)
fi ⋅ 60 obr
Prę dkość obrotowa rzeczywista - obliczamy ze wzoru ω
, n – ilość impulsów
r =
n
min
generowanych przez czujnik indukcyjny w czasie jednego obrotu wału (w tym przypadku 2).
6. Sprawozdanie
Sprawozdanie z ćwiczenia powinno zawierać:
• opisaną, w formie schematu blokowego strukturę stanowiska badawczego
• wyniki pomiarów, obliczenia prędkości oraz wykresy charakterystyk z wartościami
współczynników korelacji
• wnioski z przeprowadzonych pomiarów
5
Wyszukiwarka
Podobne podstrony:
Ćw 4 Pomiary prędkości obrotowej
POMIARY PRĘDKOŚCI OBROTOWEJ, obroty-sc, 18
Pomiar predkosci obrotowej, Księgozbiór, Studia, Elektronika i Elektrotechnika, Miernictwo
Pomiar prędkości obrotowej
Pomiar prędkości obrotowej
POMIARY PRĘDKOŚCI OBROTOWEJ, pom prędk prot, RADOM
MC Pomiar prędkości obrotowej (2)
Metrologia-lab-Pomiar Prędkości Obrotowej, Prędkość obrotowa SPR, POLITECHNIKA RADOMSKA
POMIARY PRĘDKOŚCI OBROTOWEJ, pom prędk-ściąg, RADOM
4 Sprawozdanie( 11 2014 Pomiar prędkości obrotowej wybranymi sposobami
Spr pomiary prędkości obrotowej wykresy
1 1 pomiary parametrów ruchu drgań i prędkości obrotowej
5 POMIARY DRGAŃ, PRĘDKOŚCI OBROTOWEJ I DŹWIĘKU
1 1 pomiary parametrów ruchu drgań i prędkości obrotowej
1 1 pomiary parametrów ruchu drgań i prędkości obrotowej
stanowiska pomiarowe
POMIARY PRĘDKOŚCI
więcej podobnych podstron