Pomiary prędkości (kątowej, liniowej)
Pomiary w oparciu o pomiary drogi i różniczkowanie -
(elektryczne lub numeryczne)
Różniczkowanie numeryczne
W dziedzinie czasu (ilorazy różnicowe)
W dziedzinie częstotliwości.
X(jw)=FFT(x(t))
SYGNAŁ
x
F(jw)=j*w*X(jw)
y(t)=real(IFFT(F
(jw)))
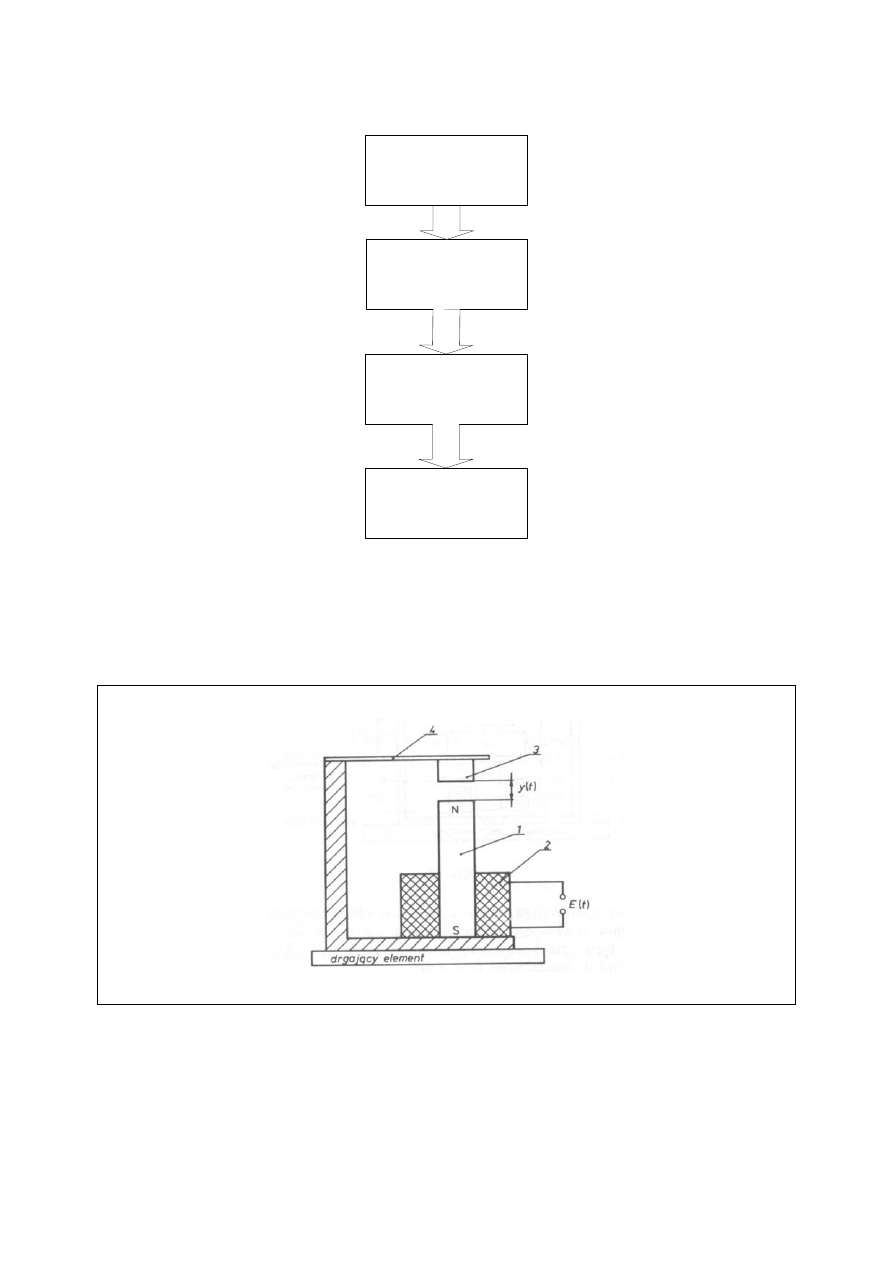
Indukcyjne przetworniki prędkości
Czujniki elektromagnetyczne
1- trwały magnes, 2 – cewka, 3 - zwora
Ruch drgający obserwowanego obiektu przenosi się na zworę
(3) powodując zmianę odległości y(t) a tym samym zmianę
strumienia magnetycznego, który w uzwojeniu cewki 2
indukuje SEM.
Czujniki generacyjne nie wymagające zasilania.
W wersji bezkontaktowej rolę zwory odgrywa drgający
obiekt.
Pomiar drgań względnych.
Możliwe tylko pomiary dynamiczne
W przypadku czujnika bezkontaktowego silne zniekształcenie
sygnału wyjściowego dla amplitud drgań większych od 10%
szczeliny statycznej.
Czułość jest funkcja odległości od obiektu oraz jego
parametrów magnetycznych
Czułość zwykle rzędu 20[mV]/[cm/s]
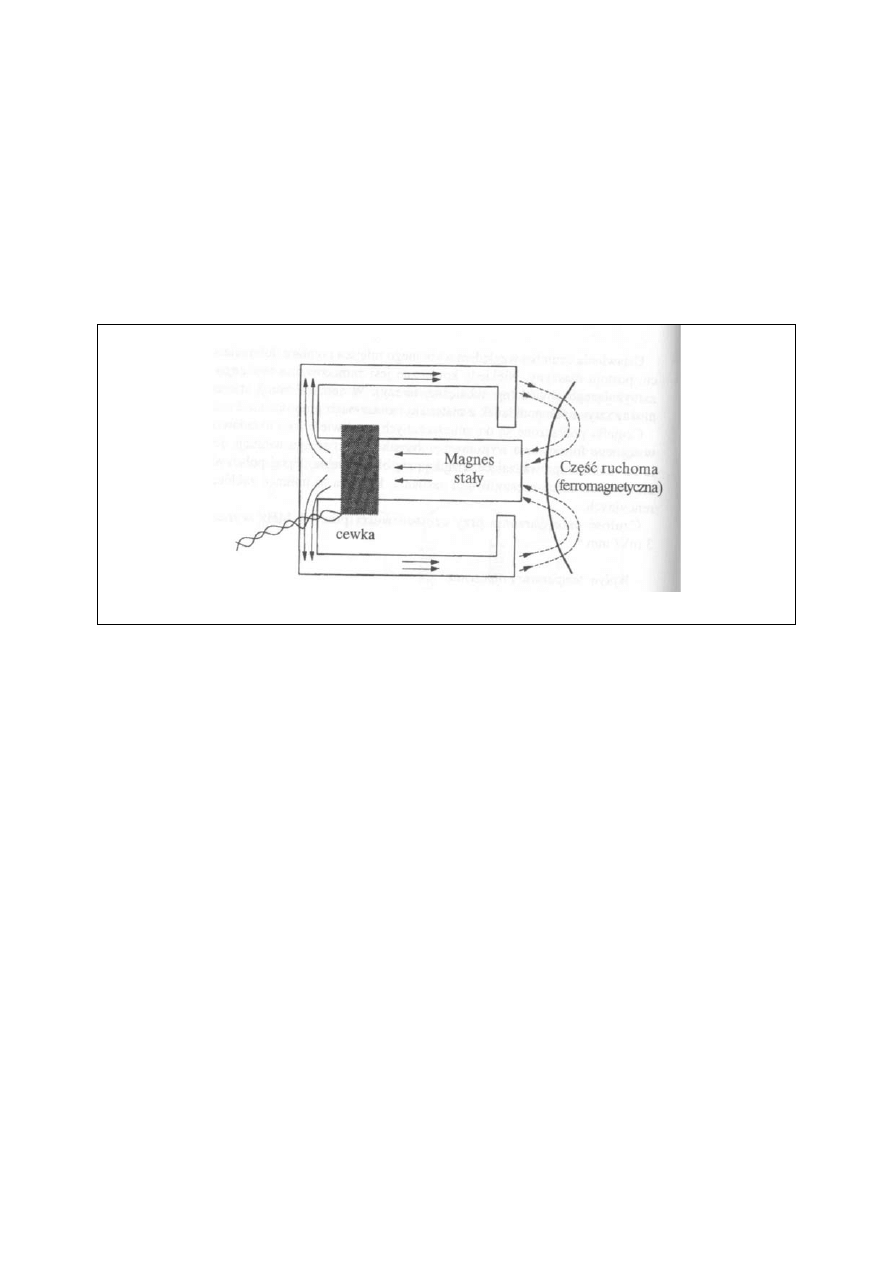
Czujnik indukcyjny prędkości z masą sejsmiczną
(elektrodynamiczny)
Ruch magnesu będącego jednocześnie masą sejsmiczną
indukuje SEM w uzwojeniach cewki.
Rozwiązania z ruchomą cewką lub ruchomym magnesem
trwałym.
Na tej zasadzie opiera się działanie sejsmografu.
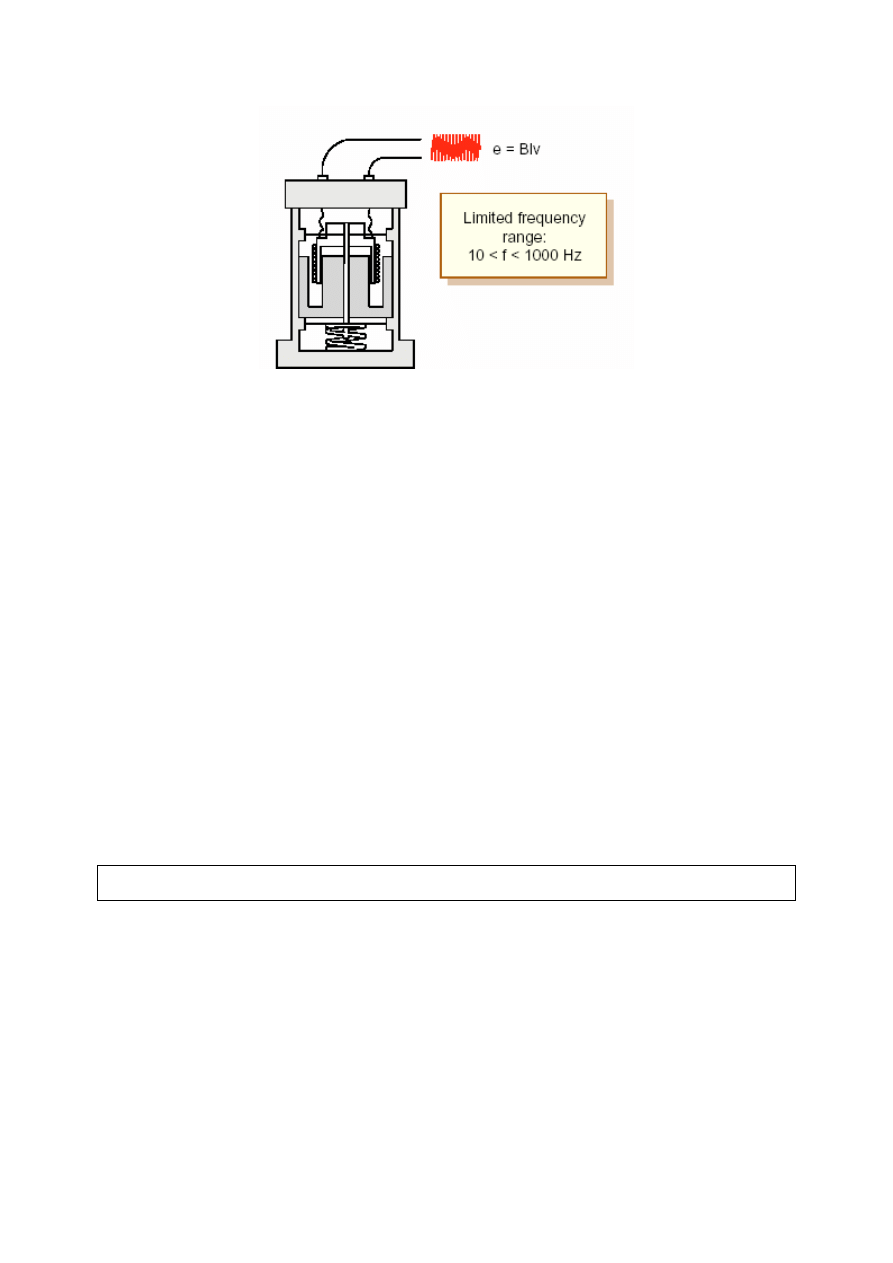
Układ względny i bezwzględny czujnika elektrodynamicznego
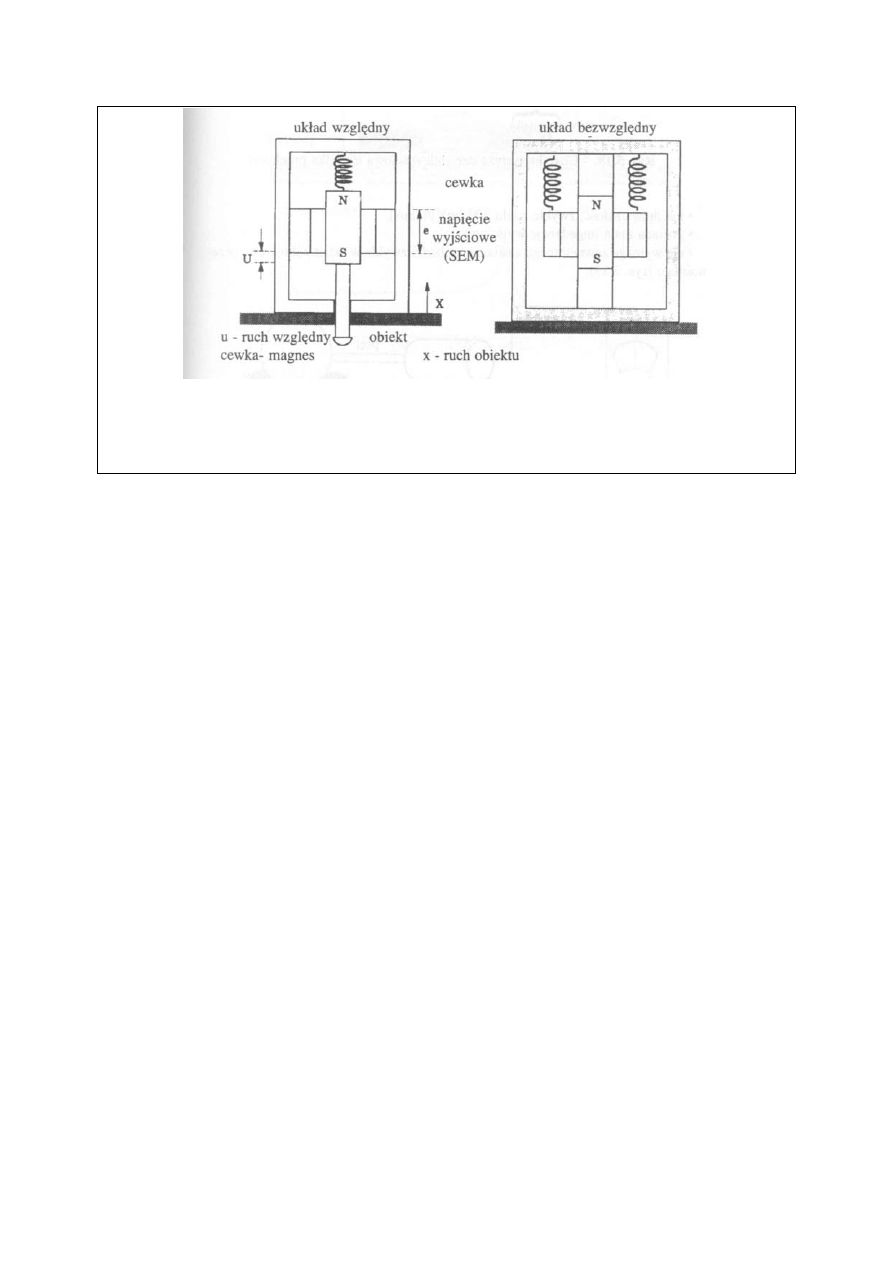
Właściwości:
Zakres częstotliwości 10 < f < 1000 Hz (rezonans poniżej 10
Hz)
Pomiar prędkości względnej
Zakres dynamiczny 1000:1
Czułość zwykle rzędu 300 [mV]/[cm/s]
Czujniki generacyjne nie wymagające zasilania.
Duży rozmiar (wielokrotnie większe od piezoelektrycznych
czujników przyspieszeń)
Zużywanie się ruchomych części
Wrażliwość na zewnętrzne pola magnetyczne
Pewna wrażliwość w kierunkach poprzecznych (trudność w
zapewnieniu wyłącznie jednego stopnia swobody dla masy
sejsmicznej)
Czujniki pracują w zakresie nadrezonansowym co wymaga
dużej masy sejsmicznej, wiotkiej sprężyny.
Możliwy tylko pomiar dynamiczny
Tachogeneratory (prądnice tachometryczne) – odwrócenie
zasady silnika elektrycznego
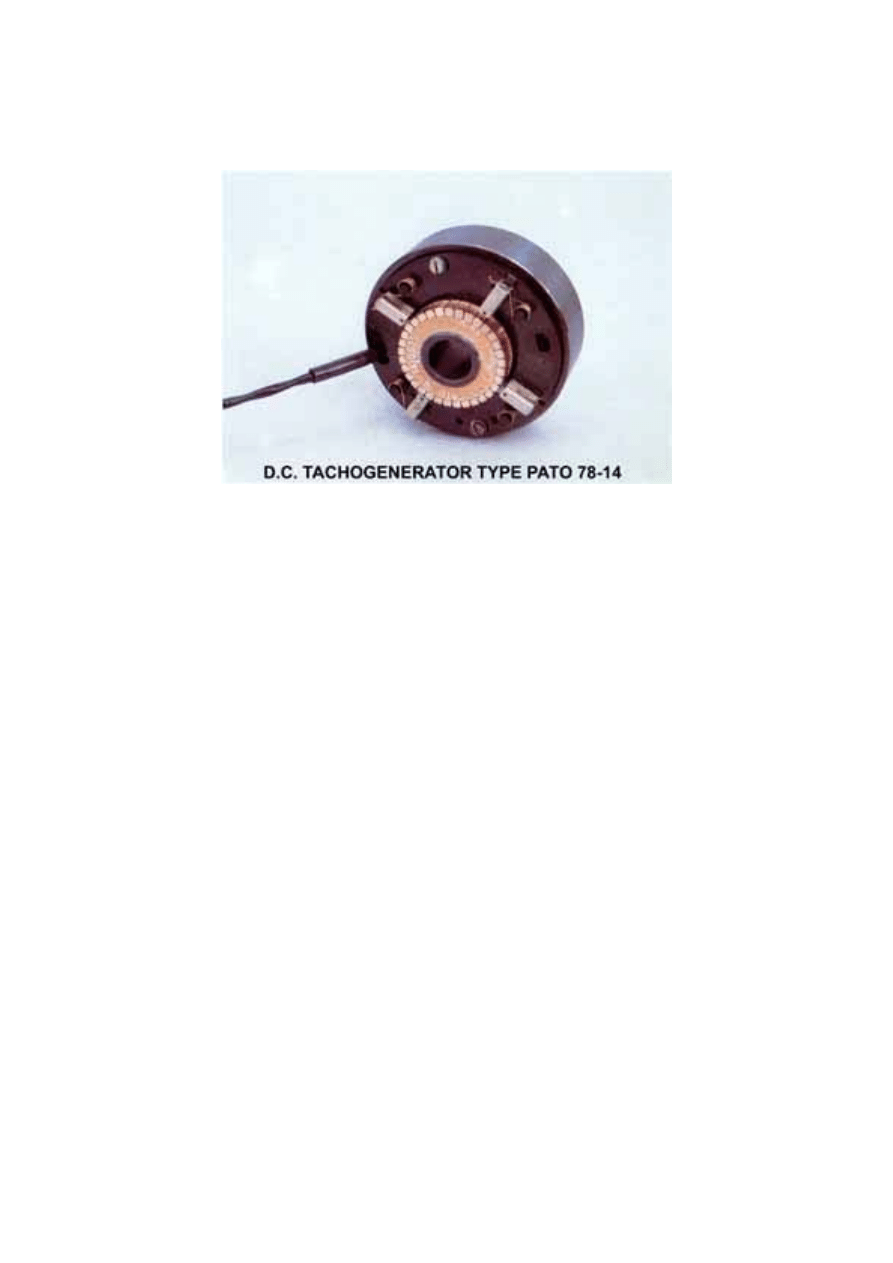
U=f(
ω
)
Przykładowe parametry
Generowane napięcie przy 1000 obr. / min. 30 V (max.
prędkość obrotowa 6000 obr. /min.
Generowane napięcie przy 1000 obr. / min. 200V (max.
prędkość obrotowa 2000 obr. /min.
Błąd liniowości 0,5 %.
Pomiary optyczne
Optyczne systemy pomiaru korelacji
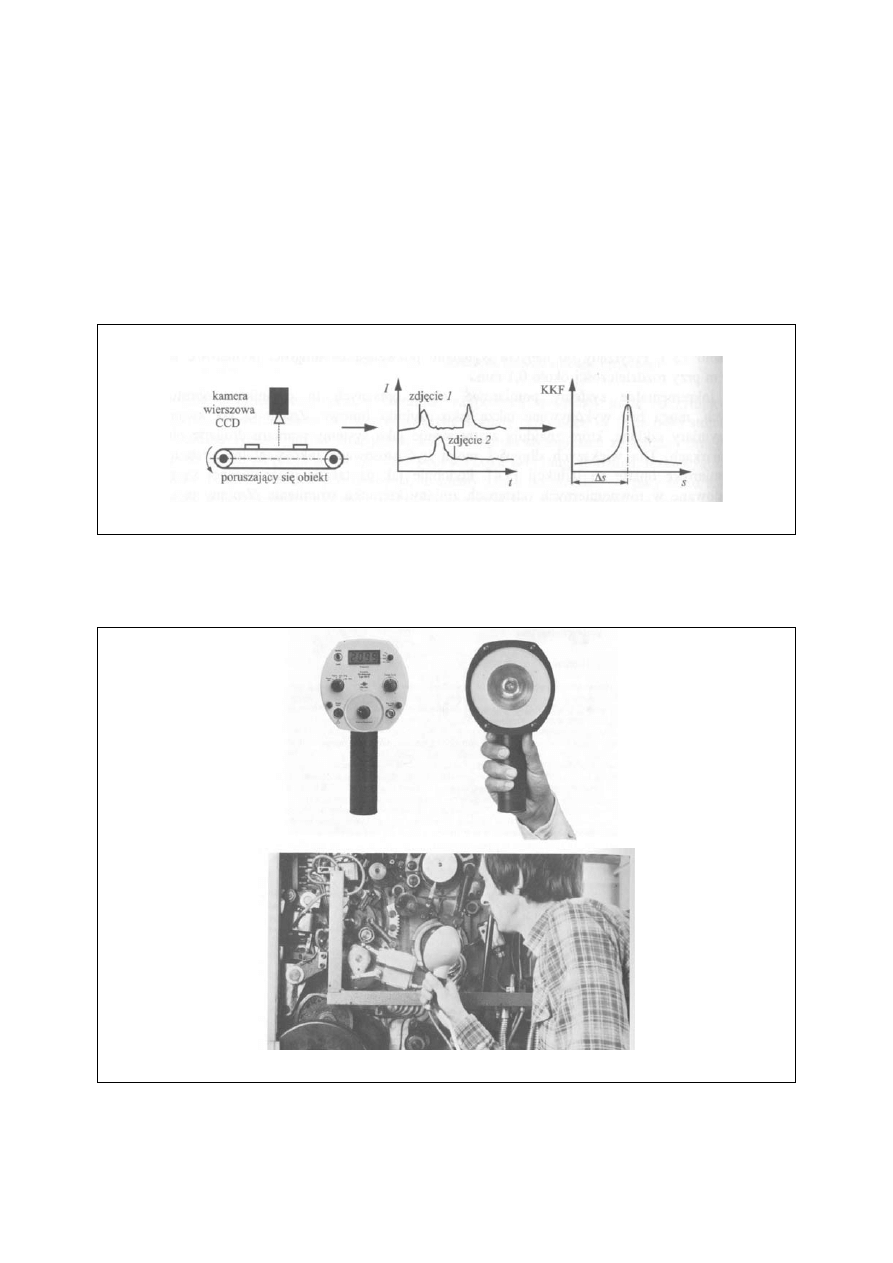
Wykonywanie zdjęć (obrazów cyfrowych) co pewien odstęp
czasu i analiza intensywności światła determinująca położenie
obiektu w czasie (dwa obrazy analizowane pod względem
intensywności funkcją korelacji wzajemnej pozwalają na
jednoznaczne określenie drogi). Przy znajomości czasu
pomiędzy zdjęciami określana jest średnia prędkość.
[5]
Pomiar prędkości obrotowej za pomocą lampy
stroboskopowej
[9]
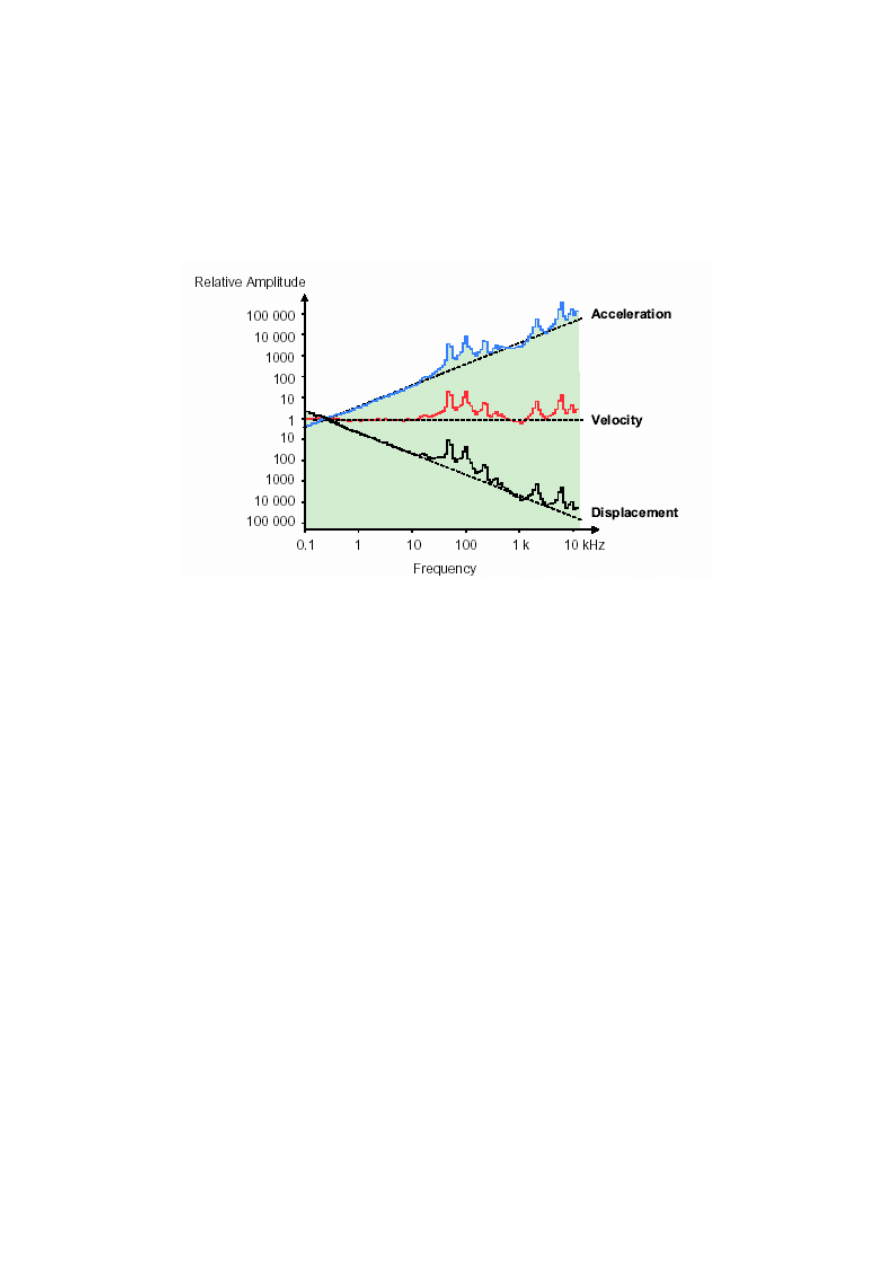
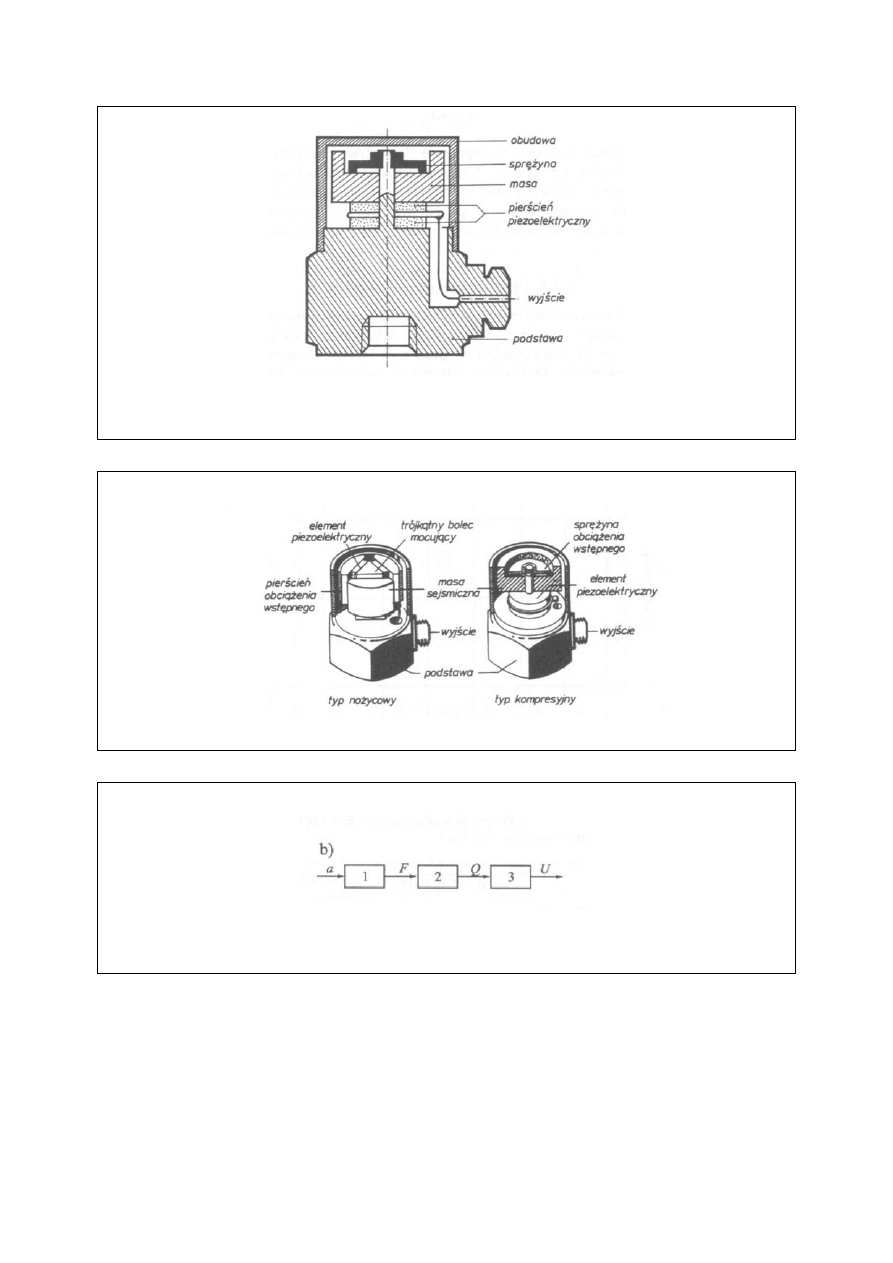
Pomiary przyspieszeń
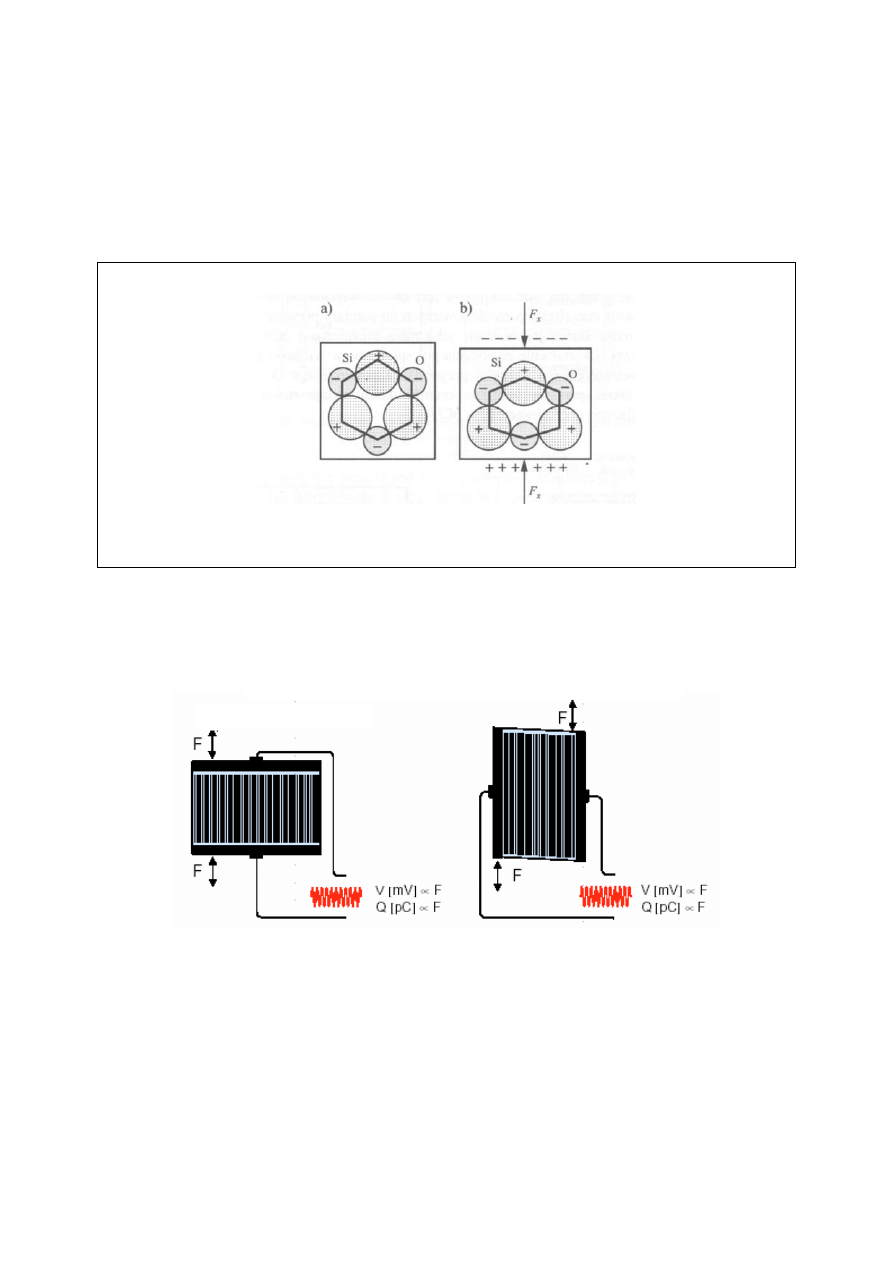
Pomiary w oparciu o efekt piezoelektryczny- powstawanie
ładunków elektrycznych na zewnętrznych powierzchniach
kryształów na skutek odkształcenia siatki krystalicznej pod
wpływem obciążenia (tytanian baru, kwarc).
[5]
Podłużny efekt piezoelektryczny lub efekt piezoelektryczny
pod wpływem naprężeń tnących
[9]
Do pomiaru przyspieszeń stosuje się czujniki z masą
sejsmiczną (pomiary bezwzględne).
[9]
[9]
[3]
U=f (F(a))
Właściwości:
Czujniki piezoelektryczne nie mogą być z zasady stosowane
do pomiarów statycznych.
Zakres od 0,1 Hz do kilkunastu kHz (zależy od masy
sejsmicznej i sprężystości elementów mocujących)
Zakresy mierzonych przyspieszeń nawet do 1000g
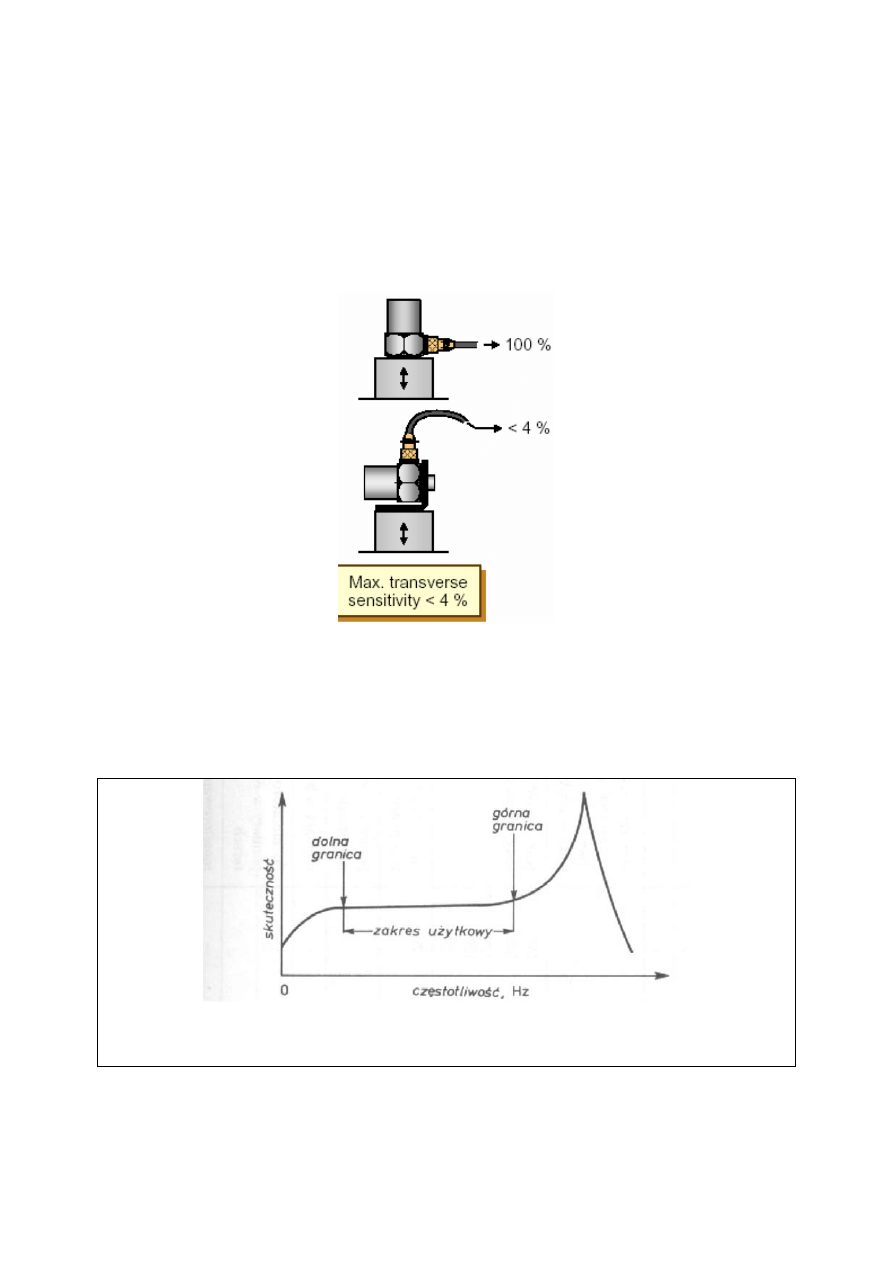
Pewna czułość w kierunku poprzecznym
[9]
Czułość 10-100 mV/g
Czujniki generacyjne
Mogą być realizowane także jako trójosiowe.
Charakterystyka dynamiczna
Zakres użyteczny 0,3-0,5 fr
Charakterystyka statyczna
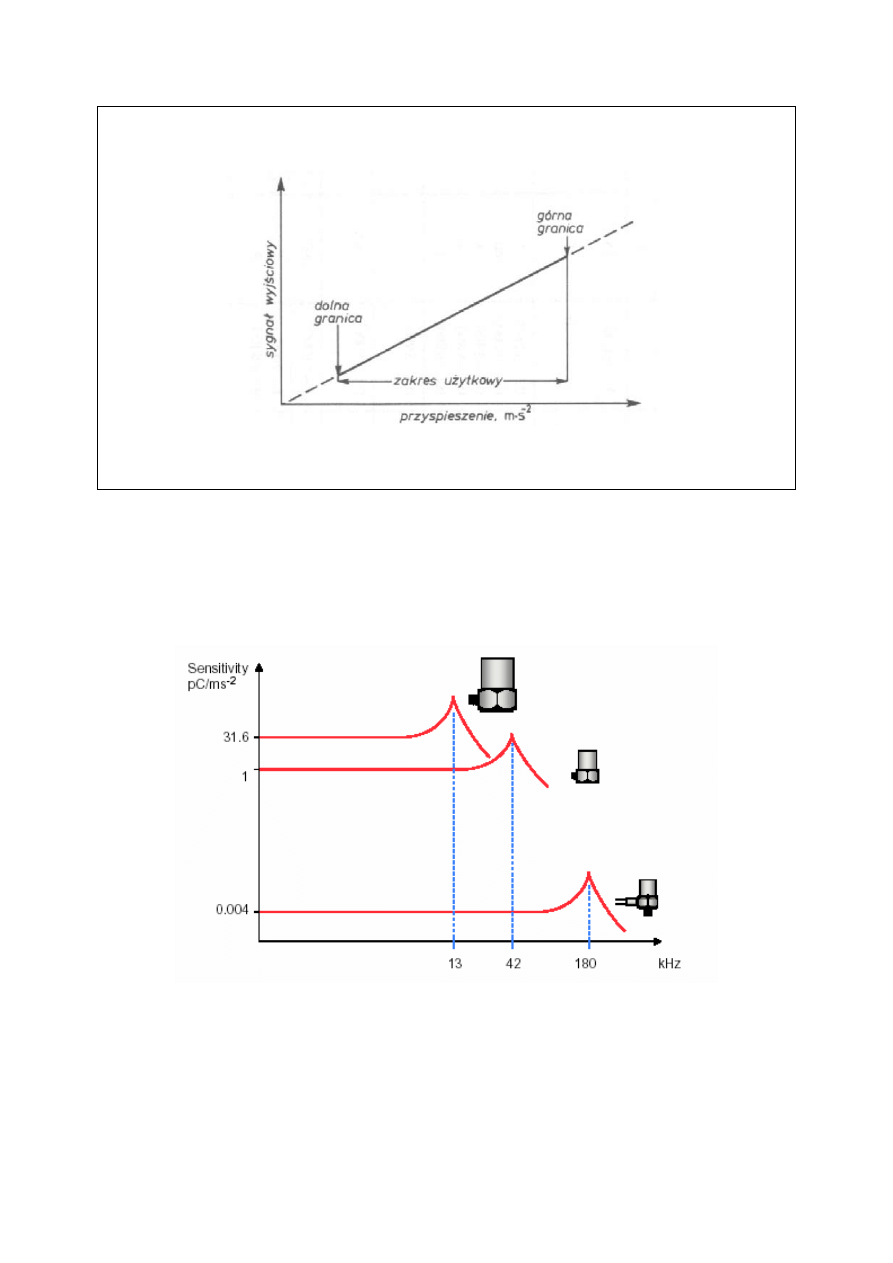
Dolna granica wynika z szumów przedwzmacniacza
Górna z wytrzymałości mechanicznej czujnika
Większa czułość = większa masa sejsmiczna = mniejszy
zakres częstotliwości
[9]
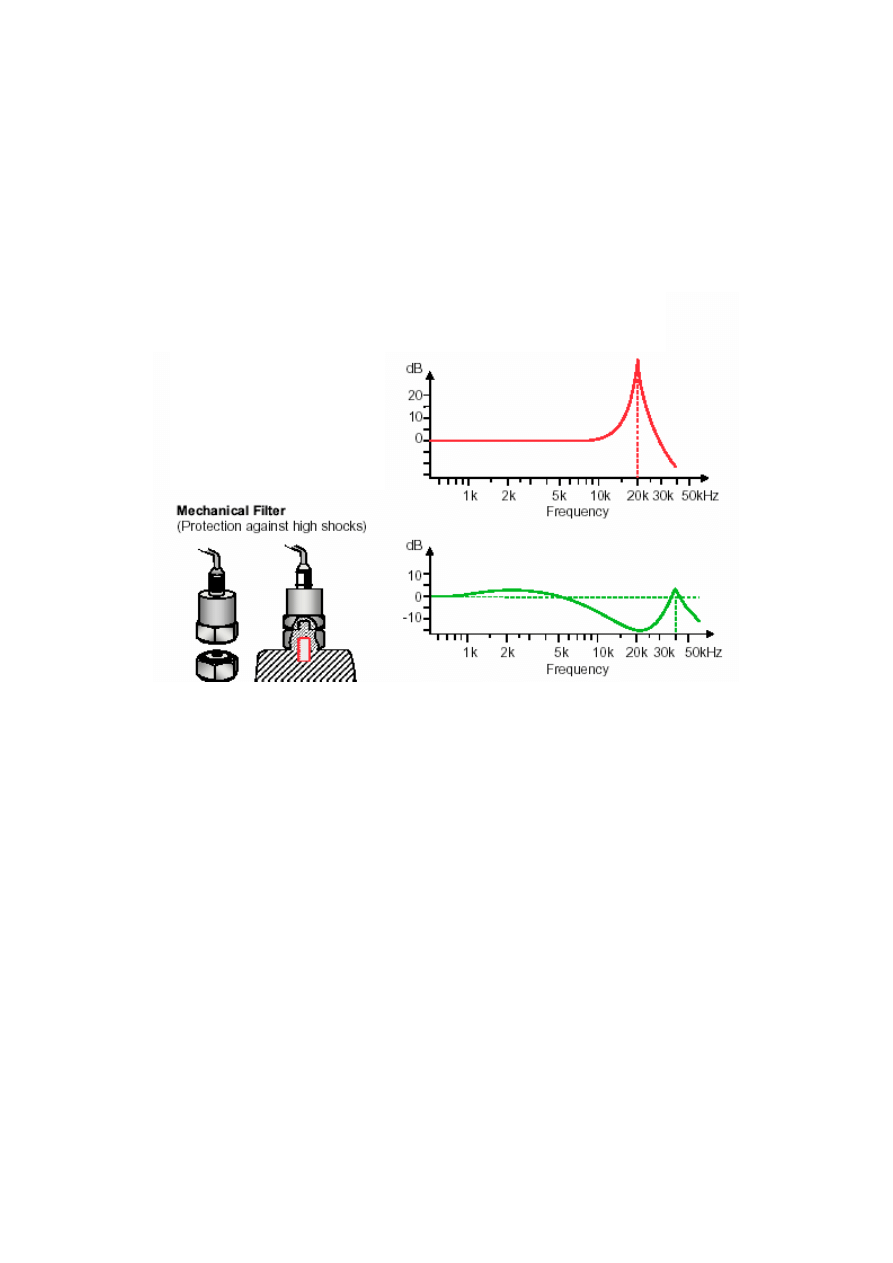
Z powodu pracy w obszarze przedrezonansowym w
przypadku występowania w obszarze rezonansu istotnych
przyspieszeń (jeżeli nie są przedmiotem zainteresowania)
konieczność stosowania filtru mechanicznego (poprawienie
stosunku sygnału do szumu)
[9]
Pomiary w oparciu o efekt piezooporu (czujniki
piezorezystancyjne, piezooporowe mikromechaniczne czujniki
przyspieszenia ) – zmiana przewodnictwa elektrycznego pod
wpływem naprężeń wywołanych siłami zewnętrznymi
powodującymi odkształcenia.
Czujniki z masą sejsmiczną pracujące ze zwykłym mostkiem
tensometrycznym. Zmiana oporności wywołana obciążeniem
moduluje amplitudę sygnału nośnego (przetwornik
przyspieszeń bezwzględnych, parametryczny wymagający
zasilania).
[5]
Właściwości:
Czułości rzędu 1mV/g (konieczność stosowania
nowoczesnych mostków tensometrycznych)
Dostępne zakresy od 1g do 10
6
g.
Pasmo przenoszenia od 0Hz nawet do kilkuset kHz
(limitowane częstotliwością nośną mostka)
Możliwość pomiaru statycznego i kwazistatycznego (bardzo
powolne procesy przyspieszeń). Wynika stąd zależność
pomiaru od kierunku działania czujnika (przyspieszenie
ziemskie)
Możliwość zintegrowania czujnika i mostka w jednym
układzie.
Możliwość realizacji czujników dwu i trójosiowych.
Zastosowanie w poduszkach powietrznych („crash sensors”)
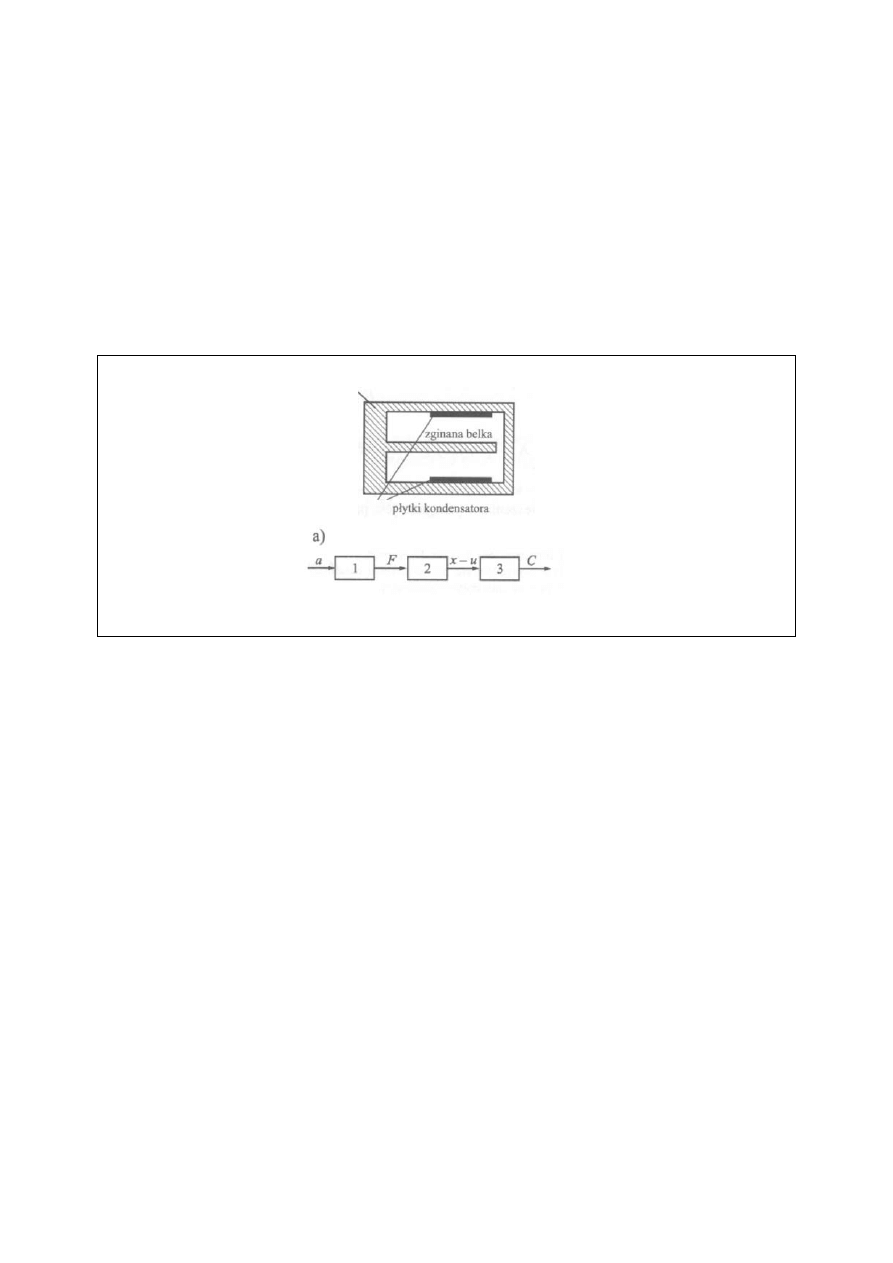
Pomiary w oparciu o zmianę pojemności (pojemnościowe
mikromechaniczne czujniki przyspieszenia)
Czujniki pojemnościowe przyspieszeń z masą sejsmiczną.
Masa sejsmiczna umocowana sprężyście stanowiąca
jednocześnie dielektryk zmienia położenie pomiędzy
okładkami kondensatora
[5]
Właściwości
Dostępne zakresy od 1g do 10
6
g.
Pasmo przenoszenia od 0Hz
Możliwość pomiaru statycznego i kwazistatycznego (bardzo
powolne procesy przyspieszeń). Wynika stąd zależność
pomiaru od kierunku działania czujnika (przyspieszenie
ziemskie)
Możliwość łatwego zintegrowania czujnika i elektroniki w
jednym układzie
Możliwość realizacji czujników dwu i trójosiowych.
Zastosowanie w poduszkach powietrznych („crash sensors”)
Pomiary prędkości i przemieszczeń w oparciu o całkowanie
sygnału przyspieszeń (prędkości).
Elektroniczne układy całkujące (usunięcie stałej składowej z
sygnału – filtracja górno-przepustowa)
Numerycznie w dziedzinie czasu i częstotliwości
X(jw)=FFT(x(t))
SYGNAŁ
x
F(jw)=X(jw)/jw
y(t)=real(IFFT(F
(jw)))
Pomiary odkształceń
Pomiary w oparciu o tensometry oporowe –czujniki
rezystancyjne (przewodnik elektryczny o dużej oporności
naklejony na podkładkę nośną). Wykorzystuje się zjawisko
zmiany oporności w raz ze zmianą długości przewodnika.
R(l) – gdzie l to długość przewodnika
Tensometry rezystancyjne przykleja się do powierzchni
konstrukcji i ze względu na znikomą sztywność elementy
tensometru podlegają tym samym odkształceniom co podłoże.
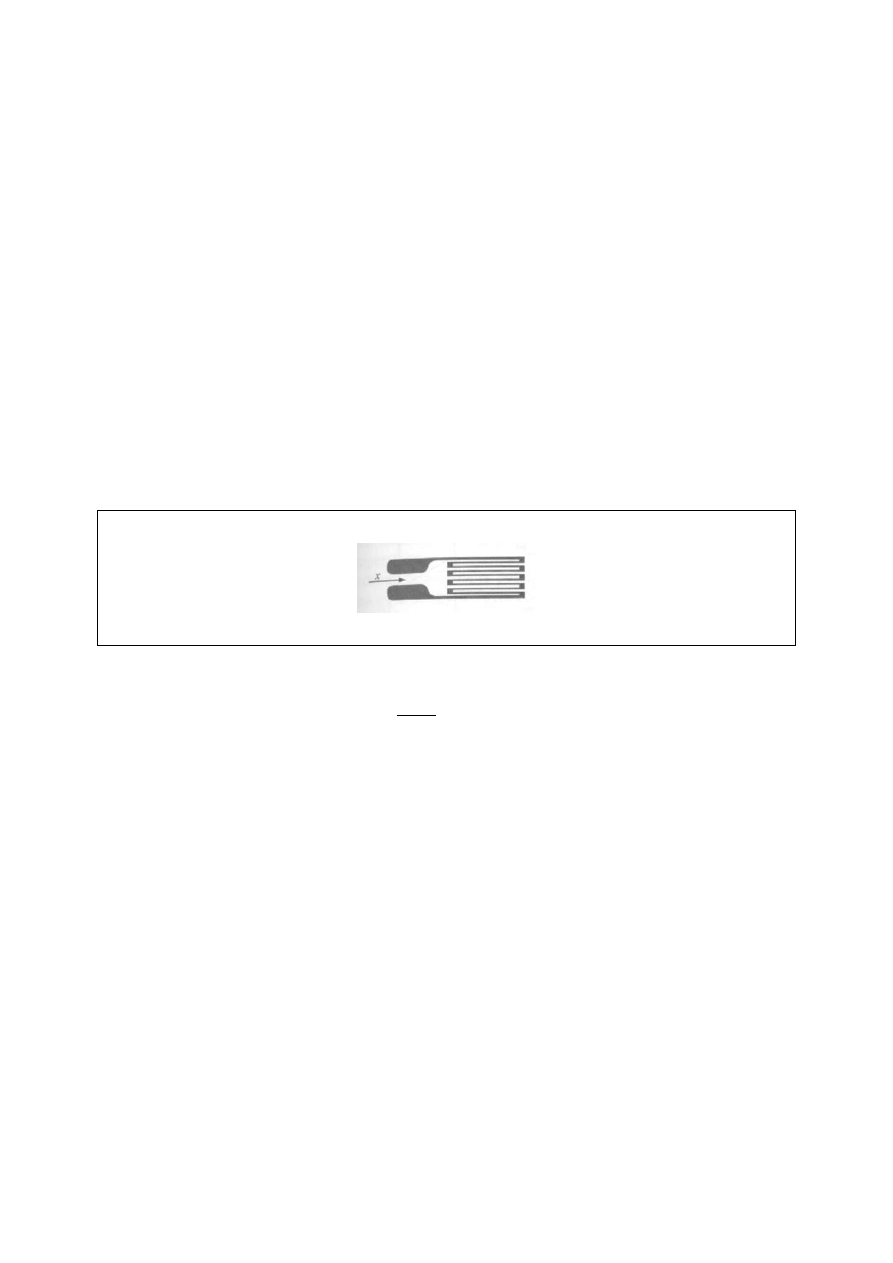
Tensometr foliowy
ε
k
R
R =
∆
ε
- wydłużenie względne
Dla tensometrów foliowych stała tensometru k~2.
Pomiar może odbywać się w oparciu o układy mostkowe
stałoprądowe (obecnie rzadko stosowane) i zmiennoprądowe.
Wadą mostków zmiennoprądowych jest ograniczenie pasma
do ok. 0,3 częstotliwości fali nośnej. Zasada pomiaru opiera
się wtedy na modulacji generowanego sygnału o
częstotliwości nośnej przebiegiem mierzonym.
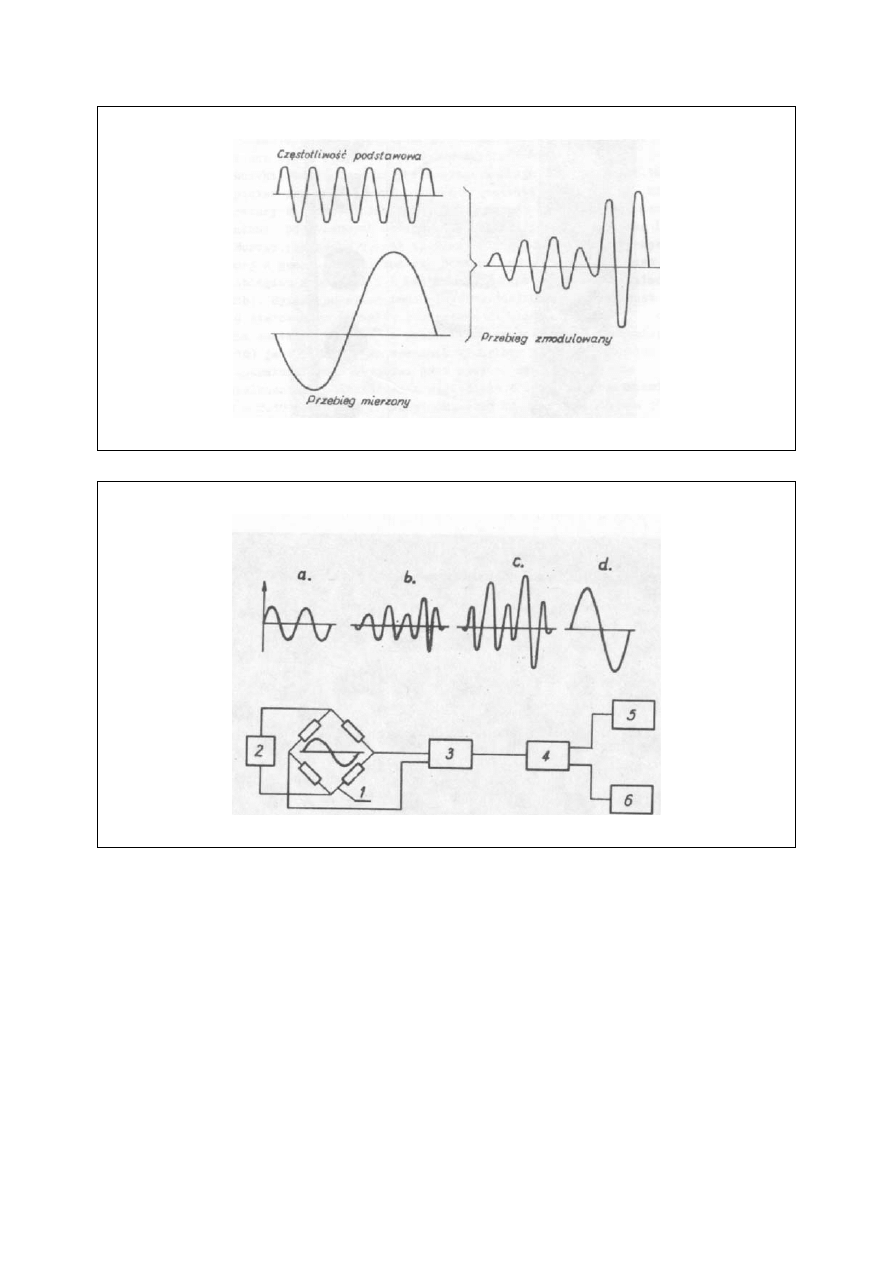
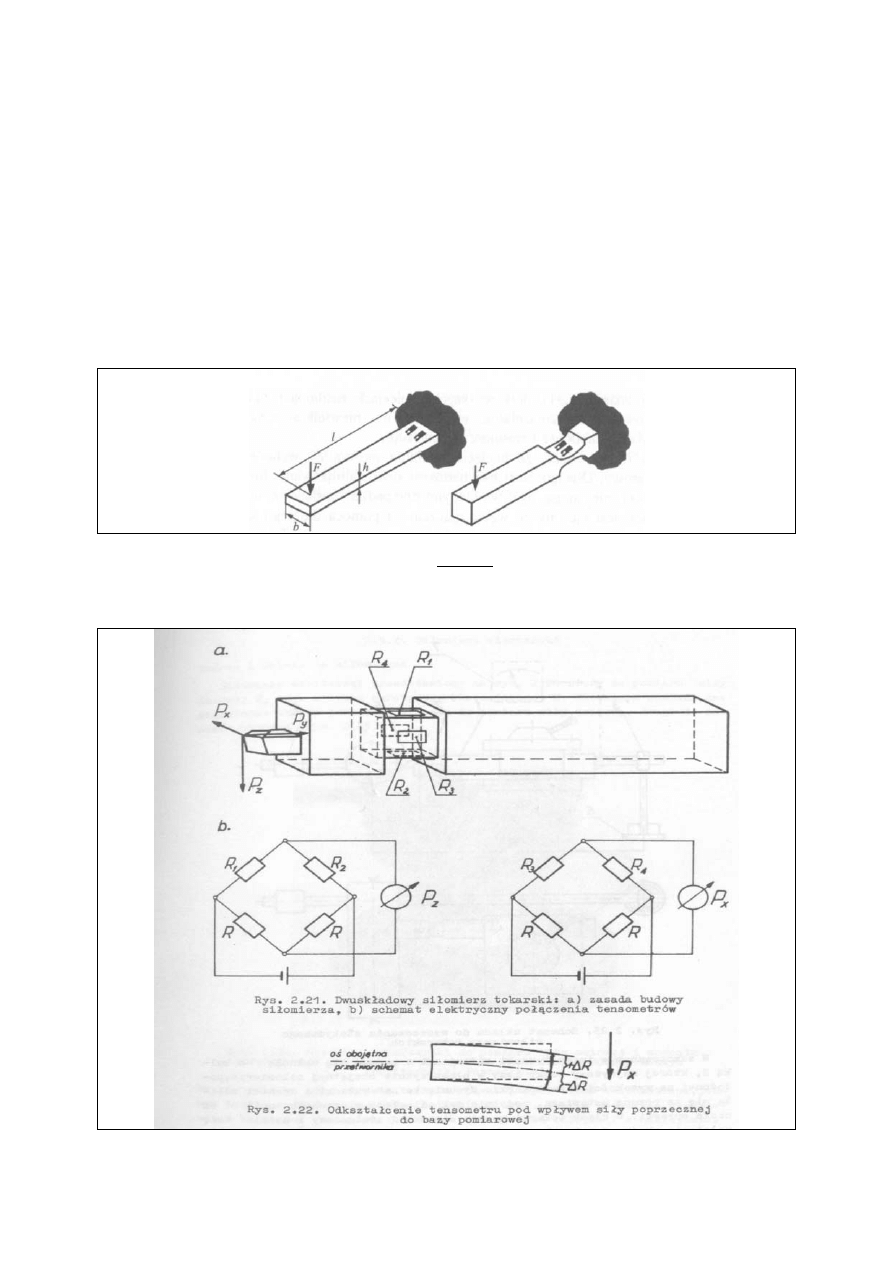
1- mostek pomiarowy (w układzie mostka znajdują się
tensometry a pozostałe oporności są stałe (tzw. półmostek,
mostek), 2 – generator fali nośnej, 3- wzmacniacz, 4 –
demodulator (usunięcie fali nośnej), 5 – wskaźnik, 6 –
rejestrator.
Mostki stało prądowe – brak ograniczeń częstotliwościowych,
brak wpływu zmian pojemności (np. przewodów),
konieczność wzmacniania napięć stałych.
Zasady doboru tensometru i kleju:
• stała wartość k dla szerokiego zakresu odkształceń,
• duża wartość k
• brak histerezy tensometru i kleju
• brak pełzania czujnika i warstwy kleju
• mały współczynnik termicznych zmian rezystancji
• współczynnik rozszerzalności liniowej czujnika taki sam
jak dla elementu na którym naklejany jest tensometr
• długoczasowa stabilność parametrów czujnika
• mała aktywność chemiczna kleju
Właściwości:
Czujniki parametryczne (parametr rezystancja)
Pomiary statyczne i dynamiczne (zakres do ok. 2kHz)
Dla tensometrów foliowych względna zmiana rezystancji
osiąga ok. 1% (efekt do pomiaru odkształcenia) natomiast
przy zmianie temperatury o 10
o
C rezystancja zmienia się np. o
4% dla miedzi. Tensometry wykonane są z materiałów o
małym współczynniku temperaturowym i stosuje się układy
różnicowe 2 lub 4 tensometry.
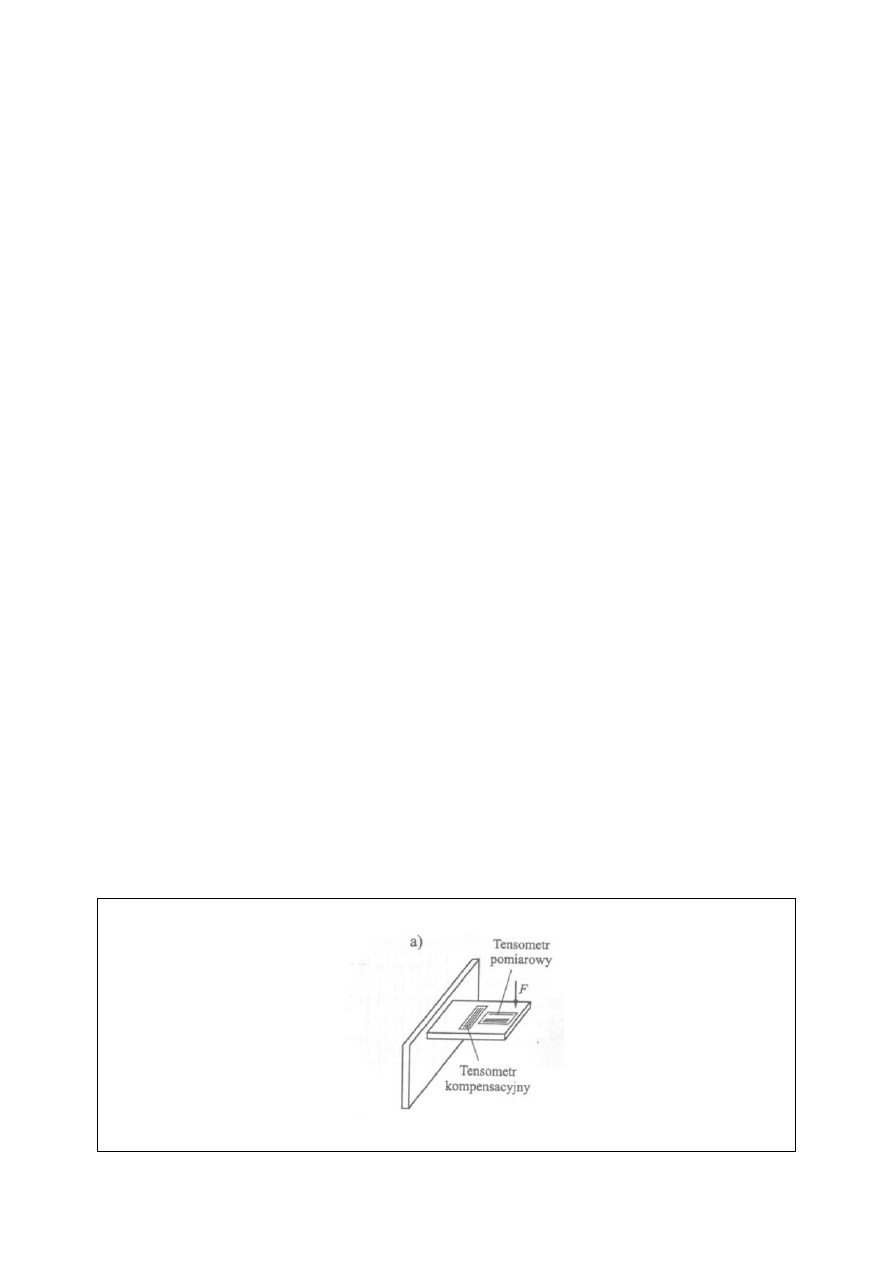
Przykładowa kompensacja temperatury (tensometr
kompensacyjny w kierunku prostopadłym do odkształcenia)
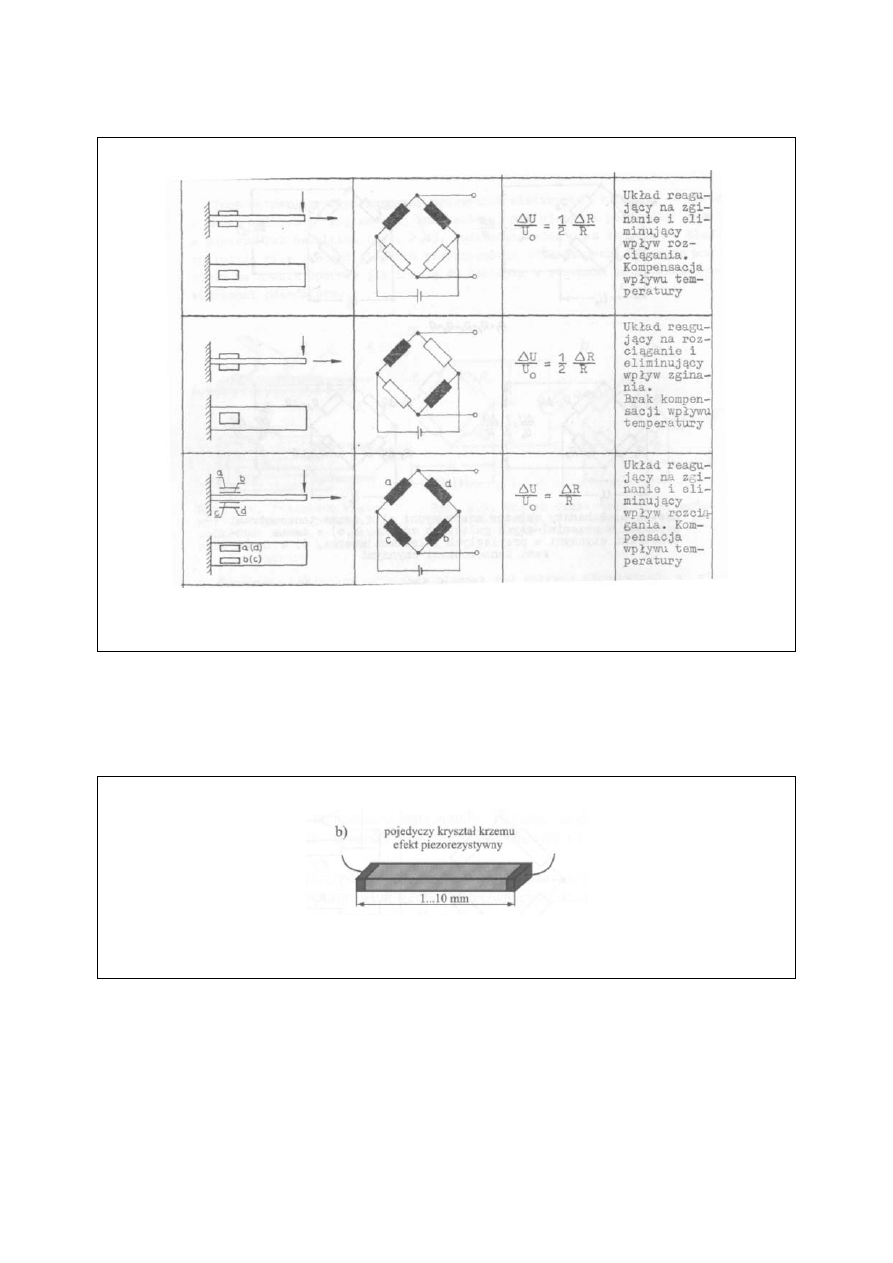
Pomiary w oparciu o tensometry półprzewodnikowe (efekt
piezorezystywny) – podczas wydłużania materiały te wykazują
silną zmianę oporności.
Bardzo duża czułość - stała k jest rzędu 100 (nawet do 200)
Duży wpływ temperatury na pomiar dodatkowo zależność
rezystancji od temperatury jest nieliniowa
Skomplikowane mocowanie do odkształcalnego ciała.
Pomiar naprężeń
Prawo Hooke’a w zakresie odkształceń sprężystych
ε
σ
E
=
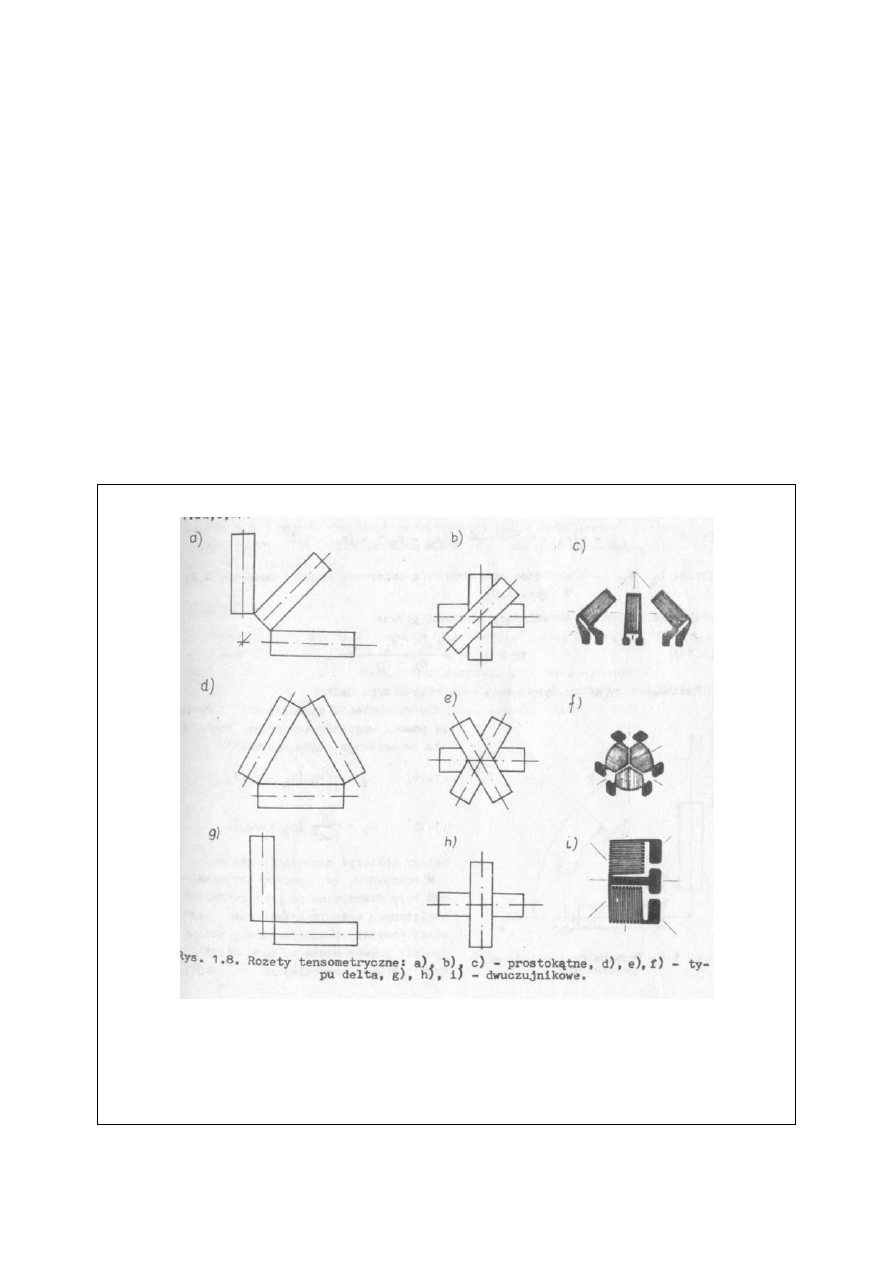
W ogólnym przypadku (jeżeli nie znamy kierunku odkształceń
głównych) pełne określenie stanu naprężeń (określenie
naprężeń głównych i kąta pomiędzy nimi dla dwuosiowego
stanu naprężeń) wymaga stosowania rozet tensometrycznych i
uogólnionego prawa Hooke’a.
Pomiar sił
Do pomiaru sił dają się zastosować, w kombinacji z ciałami
odkształcalnymi, wszystkie metody za pomocą których można
zmierzyć wydłużenie lub ugięcie (dla pomiarów statycznych np.
dynamometr ugięcie- rozciągnięcie sprężyny, ugięcie belki pod
działaniem siły i pomiar czujnikiem zegarowym tego ugięcia itp.)
F=kx
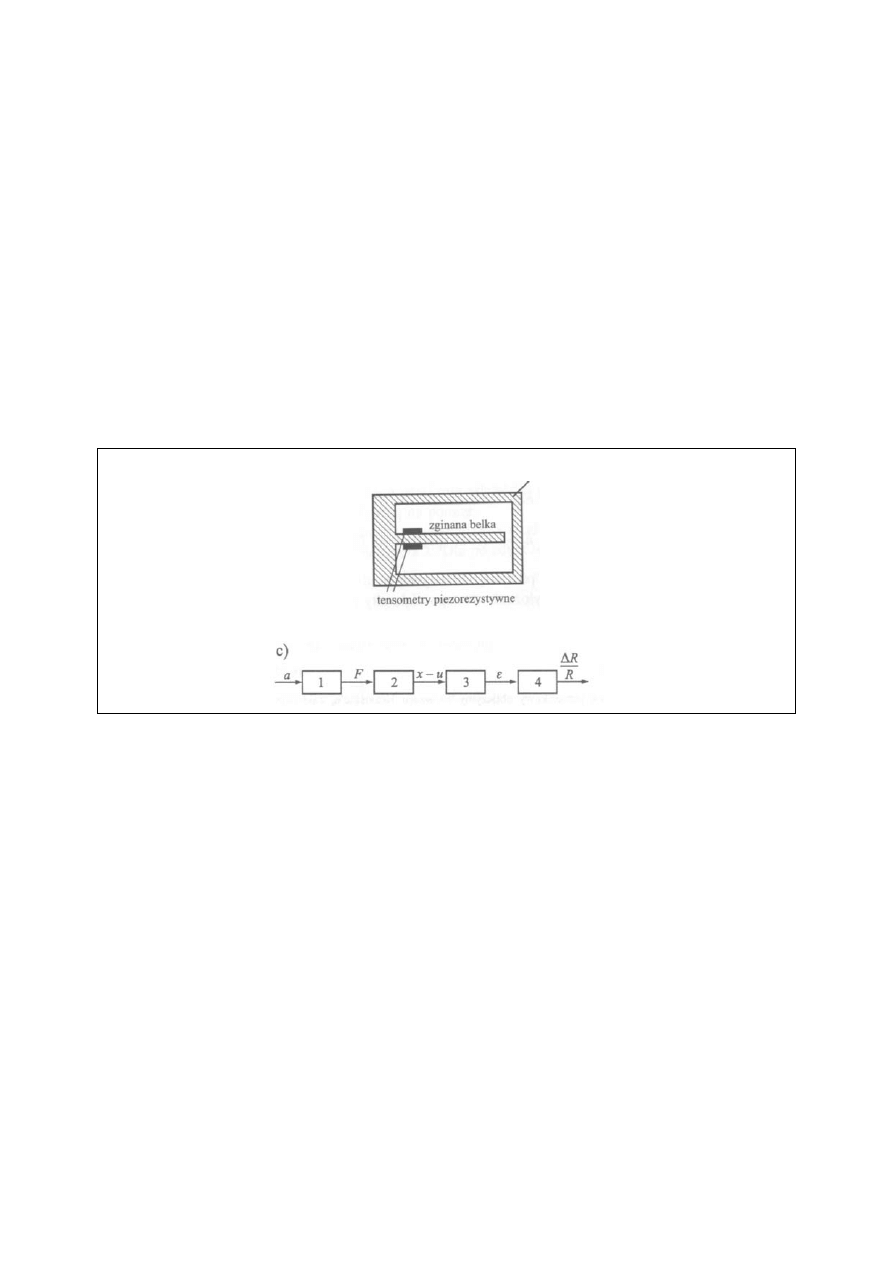
Pomiary tensometryczne – wykorzystanie informacji o
odkształceniu
2
6
Ebh
Fl
=
ε
Przykład – siłomierz tokarski
Pomiary statyczne i dynamiczne – zakresy od 0 – do ? (w
zależności od częstotliwości drgań własnych układu
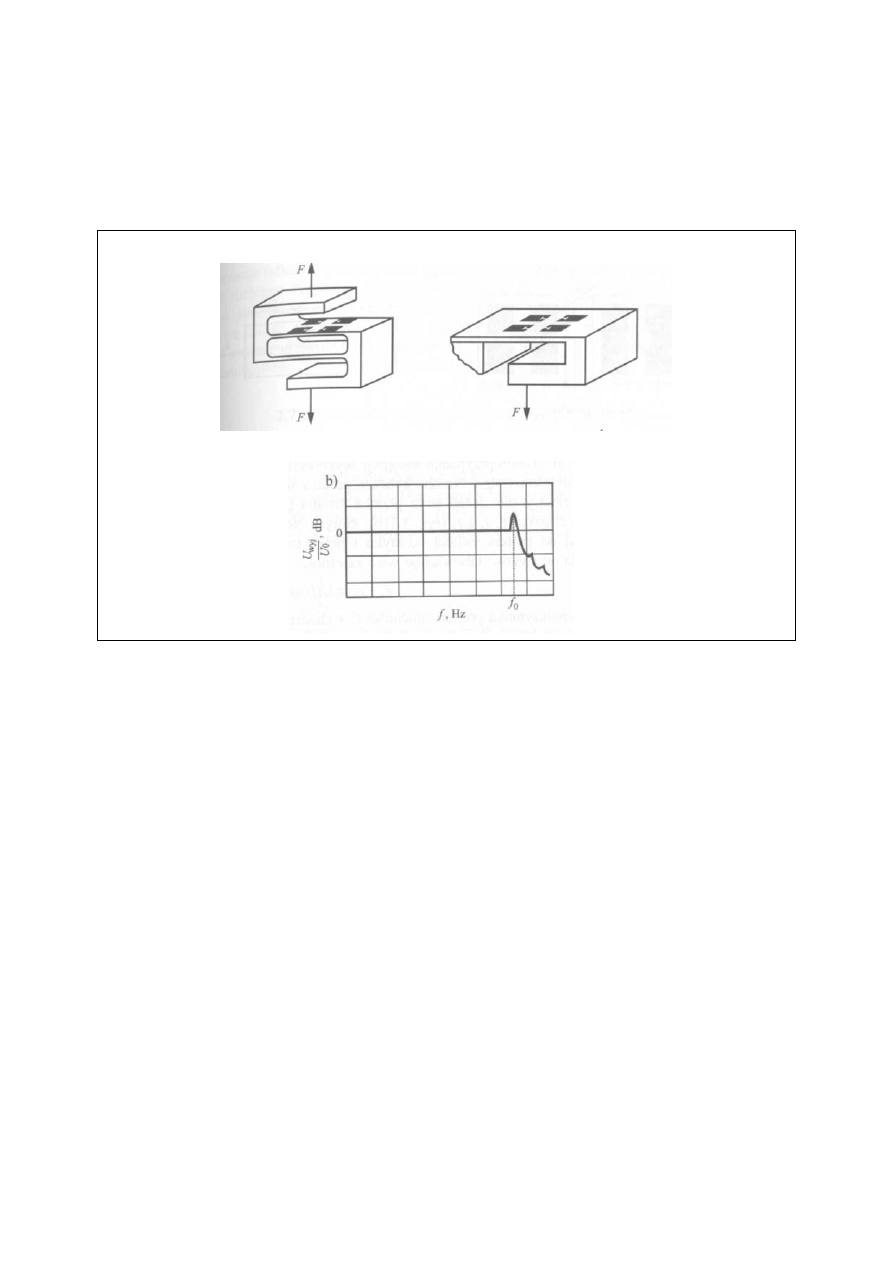
Czujniki z wielokrotnie zginaną belką
[5]
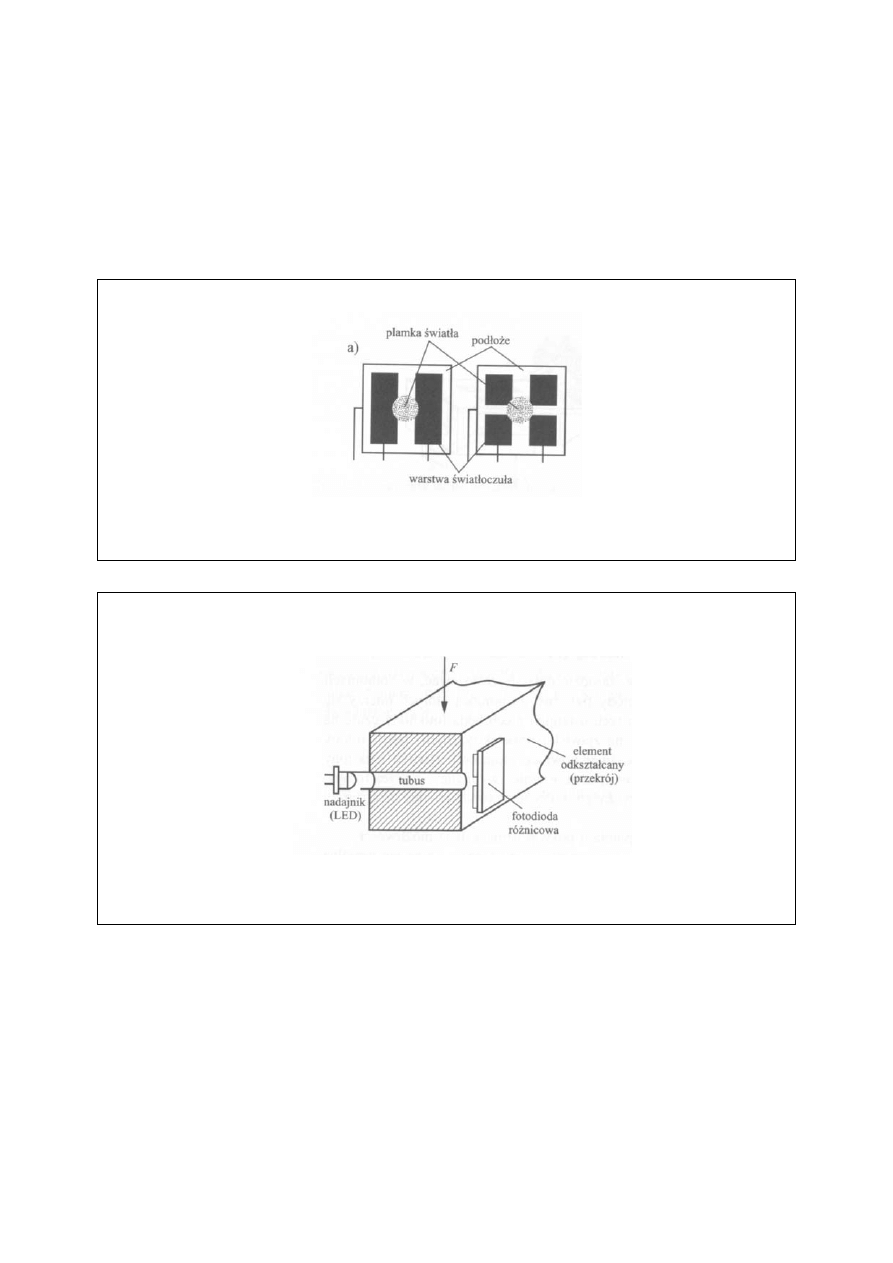
Optyczne metody pomiaru sił
Zastosowanie fotodiod różnicowych i kwadrantowych –
wykorzystanie efektu fotoprzewodnictwa (wzrost przewodnictwa
elektrycznego pod wpływem padającego światła) - zmiana prądu w
zależności od strumienia światła
[5]
[5]
Mierzalne są przesunięcia kilku mikrometrów w zakresie do
kilku milimetrów
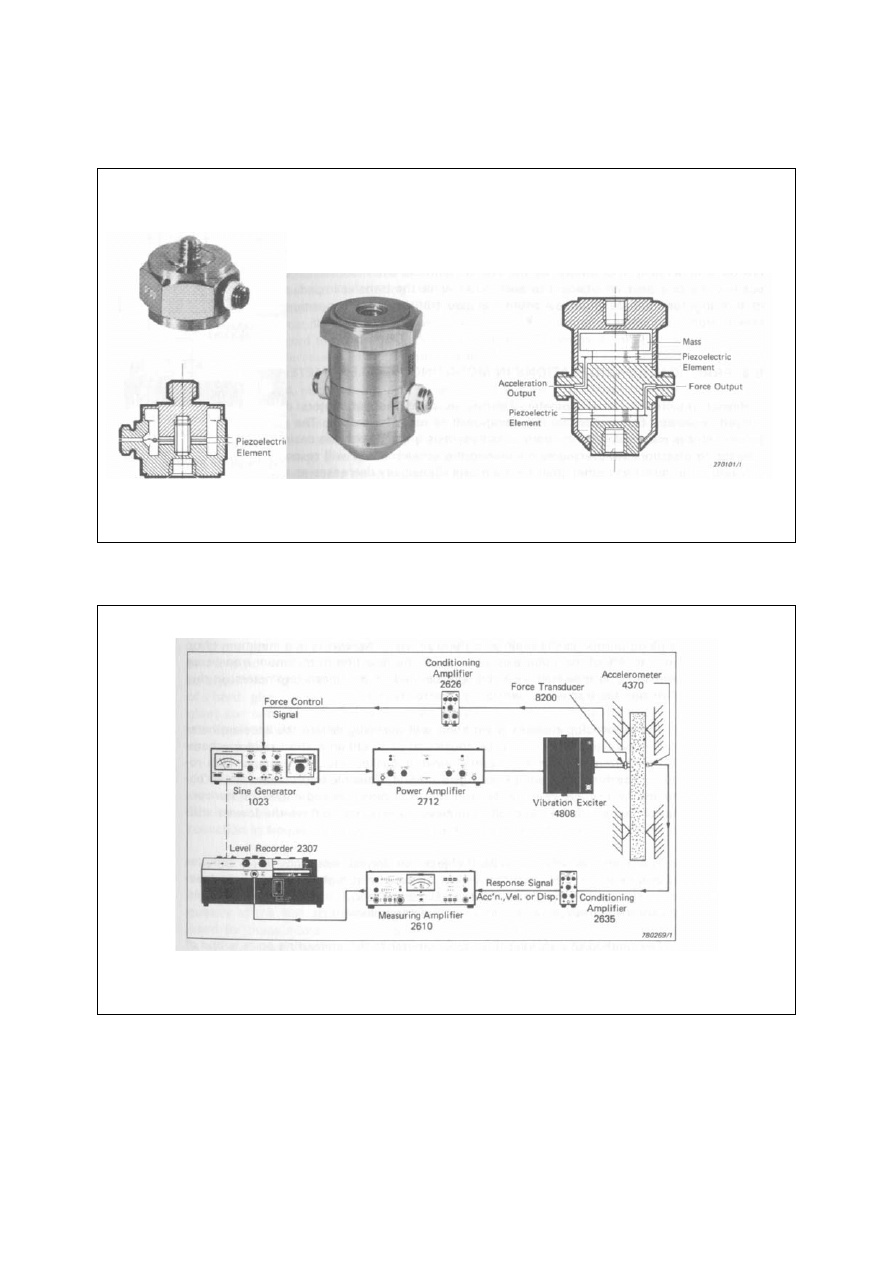
Pomiary piezoelektryczne
Czujnik siły
Głowica impedancyjna
[9]
Przetwornik siły montowany jest na drodze transmisji siły.
Wyznaczanie impedancji mechanicznej [9]
Pomiar zarówno sił rozciągających jak i ściskających (element
piezoelektryczny wstępnie ściśnięty)
Możliwe pomiary semi-statyczne i dynamiczne.
Magnetosprężyste czujniki siły
Zjawisko Villariego (efekt magnetosprężysty) - odwrotne do
magnetostrykcji – namagnesowanie ferromagnetyka rośnie lub
maleje pod wpływem działania sił zewnętrznych (obciążenia).
Zastosowanie w przetworniku nacisku dla bardzo dużych
obciążeń (presduktor).
Czujnik wyposażony w dwie cewki (wzbudzenia i odbiorczą).
W wyniku działania sił zewnętrznych zmienia się kierunek
pola magnetycznego co z kolei zmienia wartość
indukowanego napięcia w cewce odbiorczej.
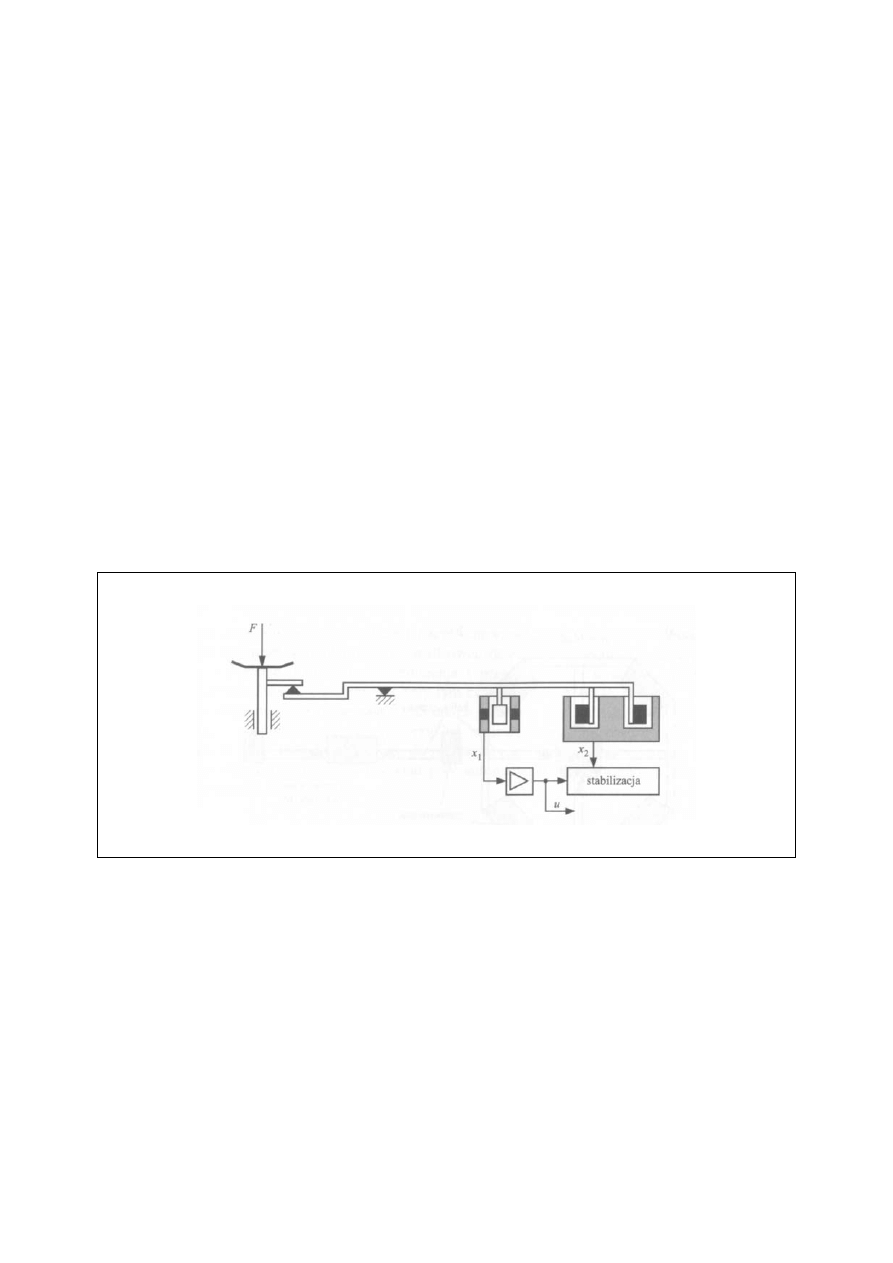
Metody kompensacyjne pomiaru sił
Waga kompensacyjna.
[5]
Wielkość wychylania wywołanego działaniem siły F jest
rejestrowana za pomocą czujnika przemieszczeń (np.
indukcyjnego). Przez obwód regulacji nastawiana jest siła
przeciwna, która kompensuje wychylenie systemu (układy
elektromagnetyczne). Zastosowana elektryczna wielkość
nastawcza (prąd, napięcie) prowadząca do zrównoważenia
układu jest miarą działającej siły.
Pomiary bardzo precyzyjne.
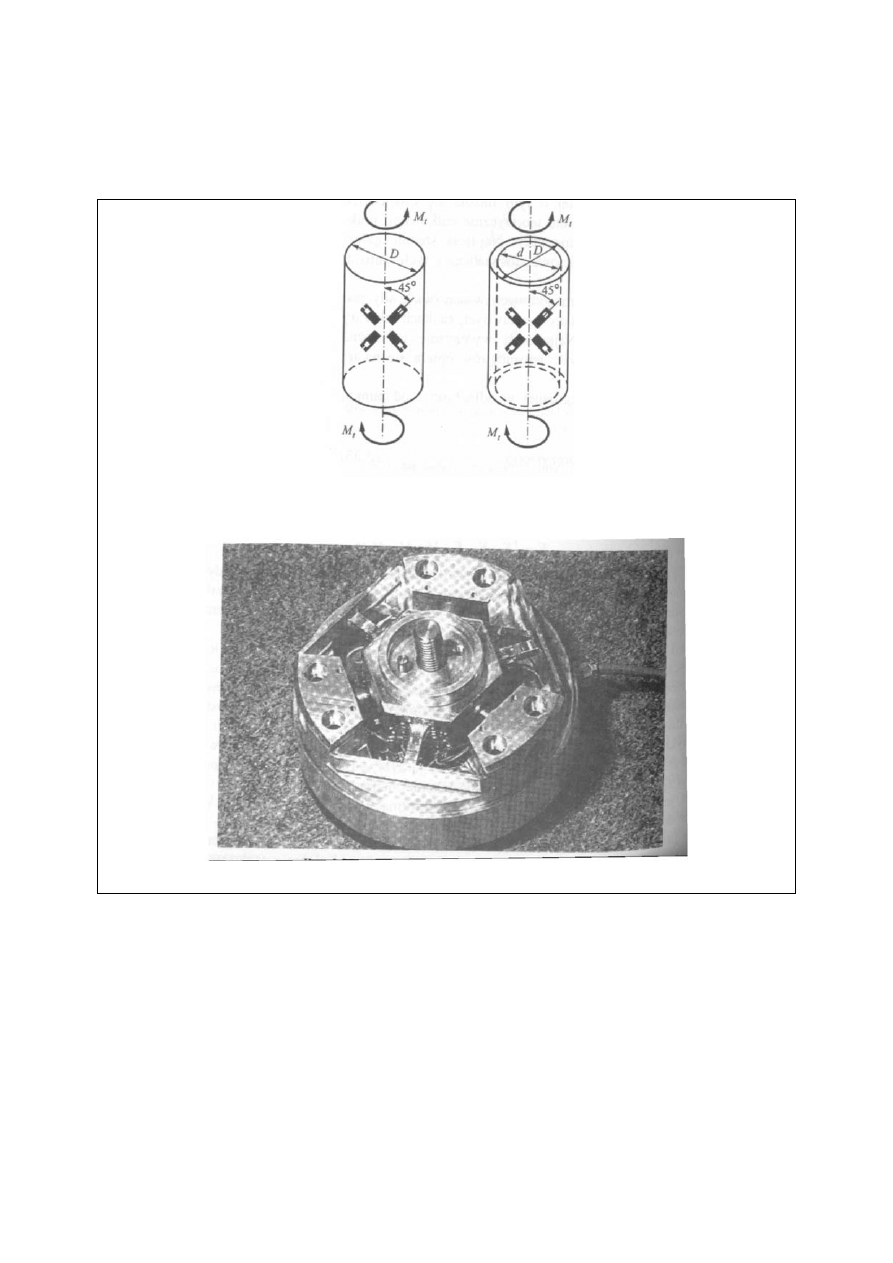
Pomiar momentów
Pomiar momentu w oparciu o metody tensometryczne.
Głowica pomiarowa (tensometryczna) 3 składowe sił i
momenty względem 3 osi
[5]
Wyszukiwarka
Podobne podstrony:
Precyzyjne pomiary prędkości radialnych gwiazd
Pomiar prędkości statków log
33 Pomiar prędkości dźwięku na podstawie efektu Dopplera
Pomiar prędkości rurką Prandtla i wpływ skośnego ustawienia rurki
Pomiary predkosci lab doc
Ćw 4 Pomiary prędkości obrotowej
12 Pomiary prędkości kątowej
Metody pomiaru predkosci
Pomiar predkosci dzieku w powietrzu, fff, dużo
POMIAR PREDKOSCI DZWIEKU METODA REZONANSU I METODA SKLADANIA DRGAN WZAJEMNIE PROSTOPADLYCHx
POMIAR PRĘDKOŚCI LOKALNEJ I ŚREDNIEJ PŁYNU
Urządzenia 2 - pomiar prędkości łuku, Politechnika Lubelska, Studia, Studia, sem VI, z ksero na wydz
Laboratorium z techniki łączenia, Pomiar prędkości łuku, Sprawozdanie z ˙wicze˙ laboratoryjnych tech
Lab01 Pomiar prędkości dźwięku w wodzie
POMIARY PRĘDKOŚCI OBROTOWEJ, obroty-sc, 18
Pomiar prędkości dźwięku w powietrzu. Metody rezonansowa i przesunięcia fazowego
Pomiar prędkości łuku prądu stałego, Politechnika Lubelska, Studia, Studia, sem VI, VI-semestr, 07la
więcej podobnych podstron