mgr in
ż
. Artur Guzowski
Katedra Maszyn Roboczych i Transportu Bliskiego
INSTYTU KONSTRUKCJI MASZYN M-3
Monitoring maszyn i urz
ą
dze
ń
poniedziałek, 4 stycznia 2010
Badania właściwości
przetworników prędkości
liniowej
budowa, zasada działania, parametry
mgr in
ż
. Artur Guzowski
Katedra Maszyn Roboczych i Transportu Bliskiego
INSTYTU KONSTRUKCJI MASZYN M-3
Monitoring maszyn i urz
ą
dze
ń
poniedziałek, 4 stycznia 2010
mgr in
ż
. Artur Guzowski
Katedra Maszyn Roboczych i Transportu Bliskiego
INSTYTU KONSTRUKCJI MASZYN M-3
Miernictwo Cieplne i Maszynowe
poniedziałek, 4 stycznia 2010
Pomiar prędkości liniowej
Pomiar prędkości liniowej
Pr
ą
dnica tachometryczna,
Przetwornik optyczny,
Pomiar drogi i ró
ż
niczkowanie.
mgr in
ż
. Artur Guzowski
Katedra Maszyn Roboczych i Transportu Bliskiego
INSTYTU KONSTRUKCJI MASZYN M-3
Miernictwo Cieplne i Maszynowe
poniedziałek, 4 stycznia 2010
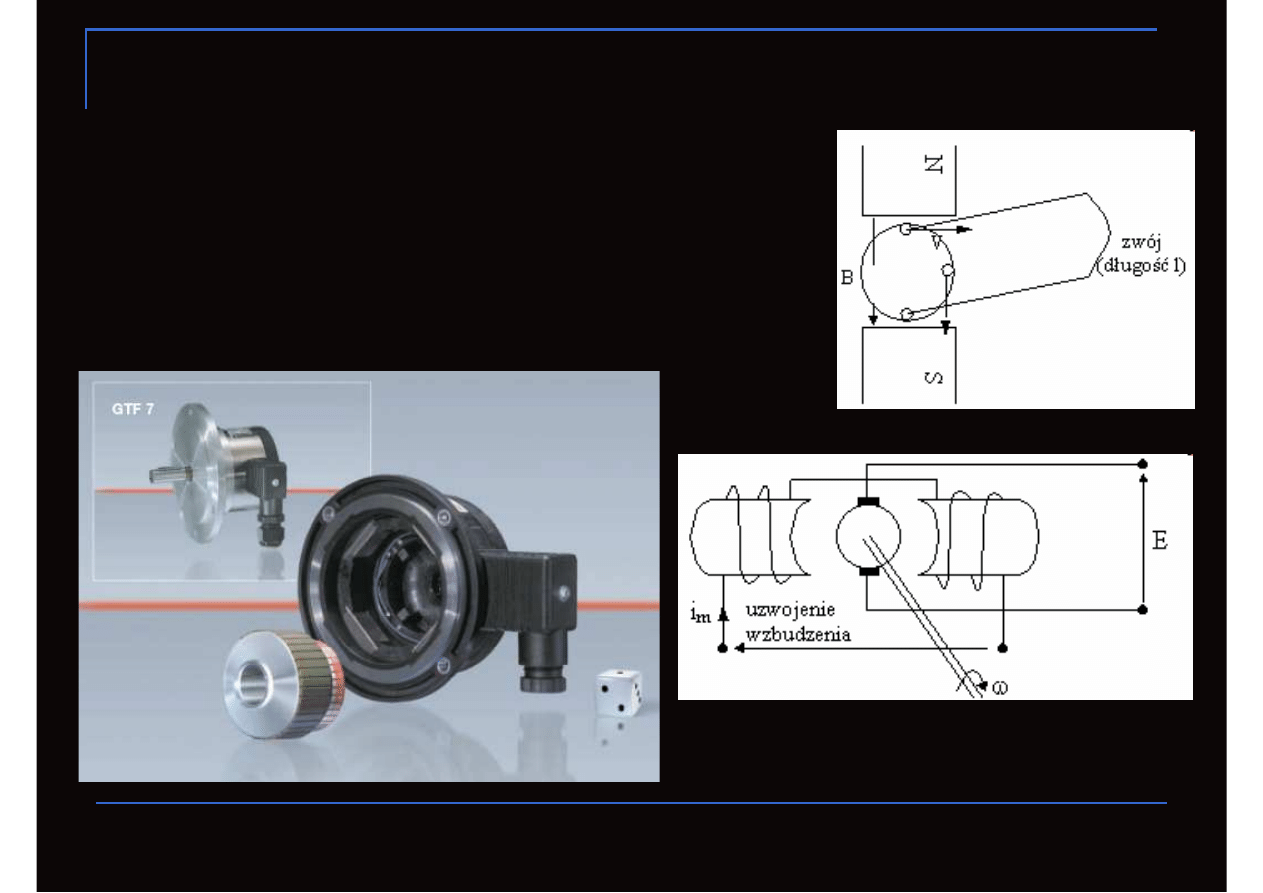
Prądnica tachometryczna
Prądnica tachometryczna
Napięcie indukowane w zwoju w wyniku ruchu (Rys.1) wynosi:
E = B l V sin(α)
gdzie α to kąt pomiędzy wektorem indukcji B a prędkości V.
Wynika stąd, że napięcie jest
funkcją sinus
.
Tachoprądnice sprzęgnięte są z wałem silnika, a napięcie
wyjściowe porównywane jest z napięciem zadającym regulatora
.
mgr in
ż
. Artur Guzowski
Katedra Maszyn Roboczych i Transportu Bliskiego
INSTYTU KONSTRUKCJI MASZYN M-3
Miernictwo Cieplne i Maszynowe
poniedziałek, 4 stycznia 2010
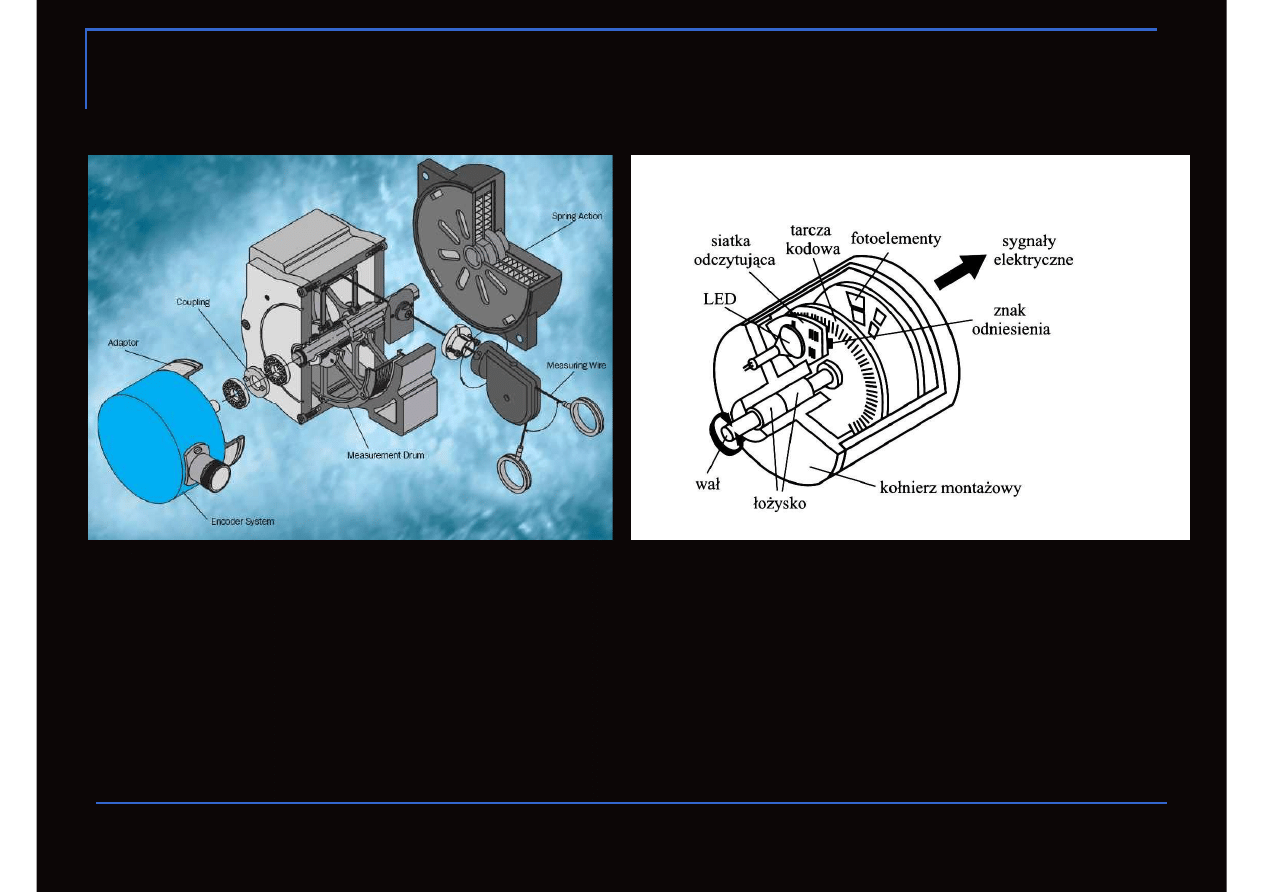
Budowa
Budowa
enkoderowego
enkoderowego
przetwornika prędkości
przetwornika prędkości
Liczba impulsów przekazana w odpowiednim czasie odwzorowuje aktualną prędkość.
Dają one do 10000 impulsów na jeden obrót, co pozwala osiągnąć dużą dokładność pomiaru.
Zbudowane są one tradycyjnie z tarczy z odpowiednią ilością zębów (od kiluset do 10000) i
czujników optoelektronicznych bądź indukcyjnych (np. przetworniki Halla).
mgr in
ż
. Artur Guzowski
Katedra Maszyn Roboczych i Transportu Bliskiego
INSTYTU KONSTRUKCJI MASZYN M-3
Miernictwo Cieplne i Maszynowe
poniedziałek, 4 stycznia 2010
Budowa
Budowa
enkoderowego
enkoderowego
przetwornika prędkości
przetwornika prędkości
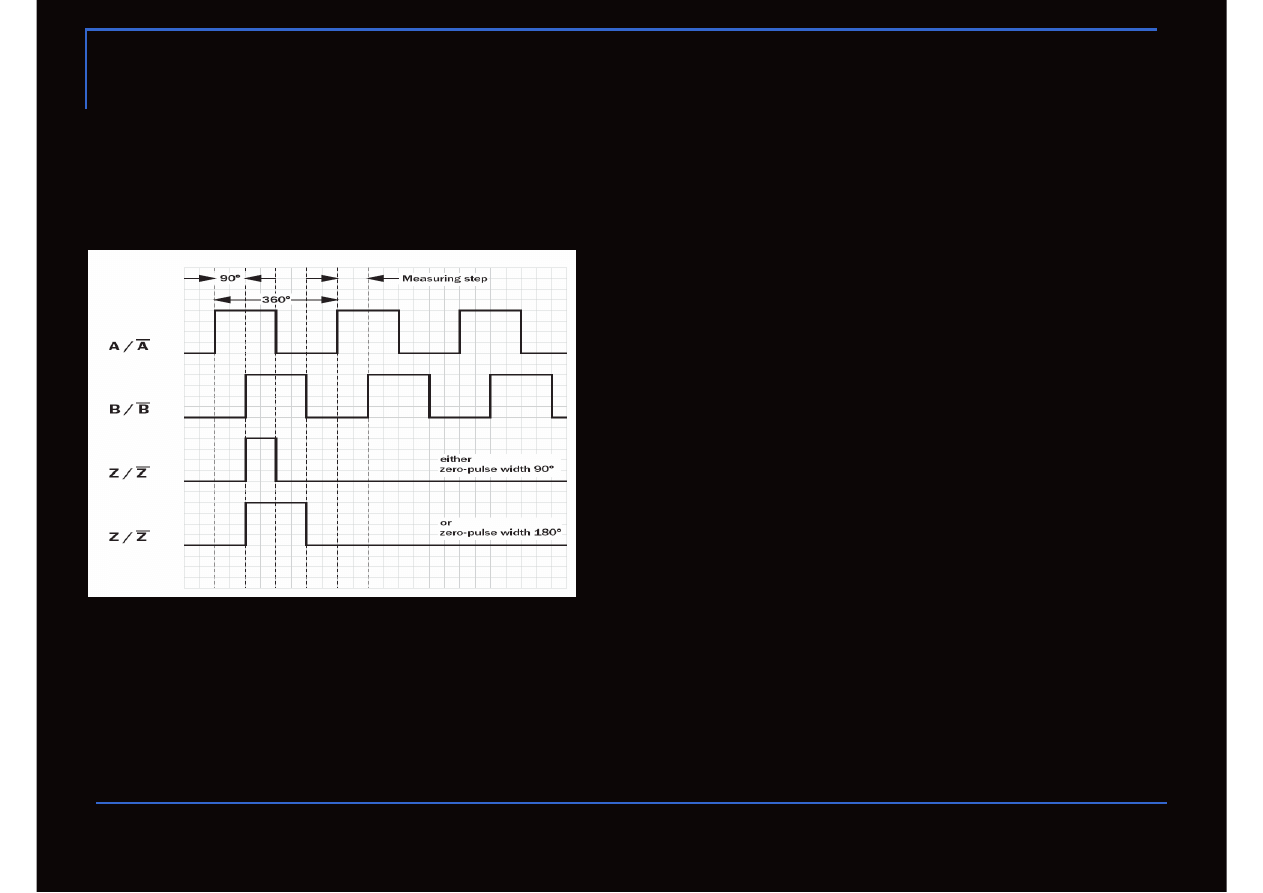
W dwukierunkowych układach napędowych
stosuje się bardziej złożone mierniki prędkości ze
względu na konieczność wykrywania w nich
również
kierunku prędkości
.
Dokonuje się tego poprzez umieszczenie
dwóch
czujników optoelektronicznych przesuniętych
wzajemnie o 90°
.
Sekwencje impulsów z czujników:
AB: 11, 01, 00, 10, 11
obroty w lewo
AB: 11, 10, 00, 01, 11
obroty w prawo
Można skonstruować odpowiedni układ logiczny
do detekcji tych sekwencji lub zastosować układ
mikroprocesorowy.
mgr in
ż
. Artur Guzowski
Katedra Maszyn Roboczych i Transportu Bliskiego
INSTYTU KONSTRUKCJI MASZYN M-3
Miernictwo Cieplne i Maszynowe
poniedziałek, 4 stycznia 2010
Sprawozdanie
Sprawozdanie
1. Schemat układu pomiarowego :
- bloki układu pomiarowego, przyrządy, elementy,
- oznaczenia elementów układu i wielkości mierzonych.
2. Wykaz aparatury:
- typ przyrządu, użyteczne parametry.
3. Opis eksperymentu :
- krótki opis procedury pomiarowej
4. Obliczenia i wykresy :
- obliczenia wykonywane w trakcie pomiarów (przykłady obliczeń),
- wykresy (przebiegi czasowe mierzonych parametrów) .
5. Wnioski :
- wyeksponowanie najważniejszych rezultatów,
- odniesienie uzyskanych danych doświadczalnych do teorii zagadnienia,
- krytyczne ustosunkowanie się do wyników pomiarów,
- ocena, czy cel eksperymentu został osiągnięty,
- wskazanie ew. trudności podczas przeprowadzania eksperymentu,
- opracowanie zaleceń, np. dla praktyki inżynierskiej
mgr in
ż
. Artur Guzowski
Katedra Maszyn Roboczych i Transportu Bliskiego
INSTYTU KONSTRUKCJI MASZYN M-3
Miernictwo Cieplne i Maszynowe
poniedziałek, 4 stycznia 2010
Zadania
Zadania
1.
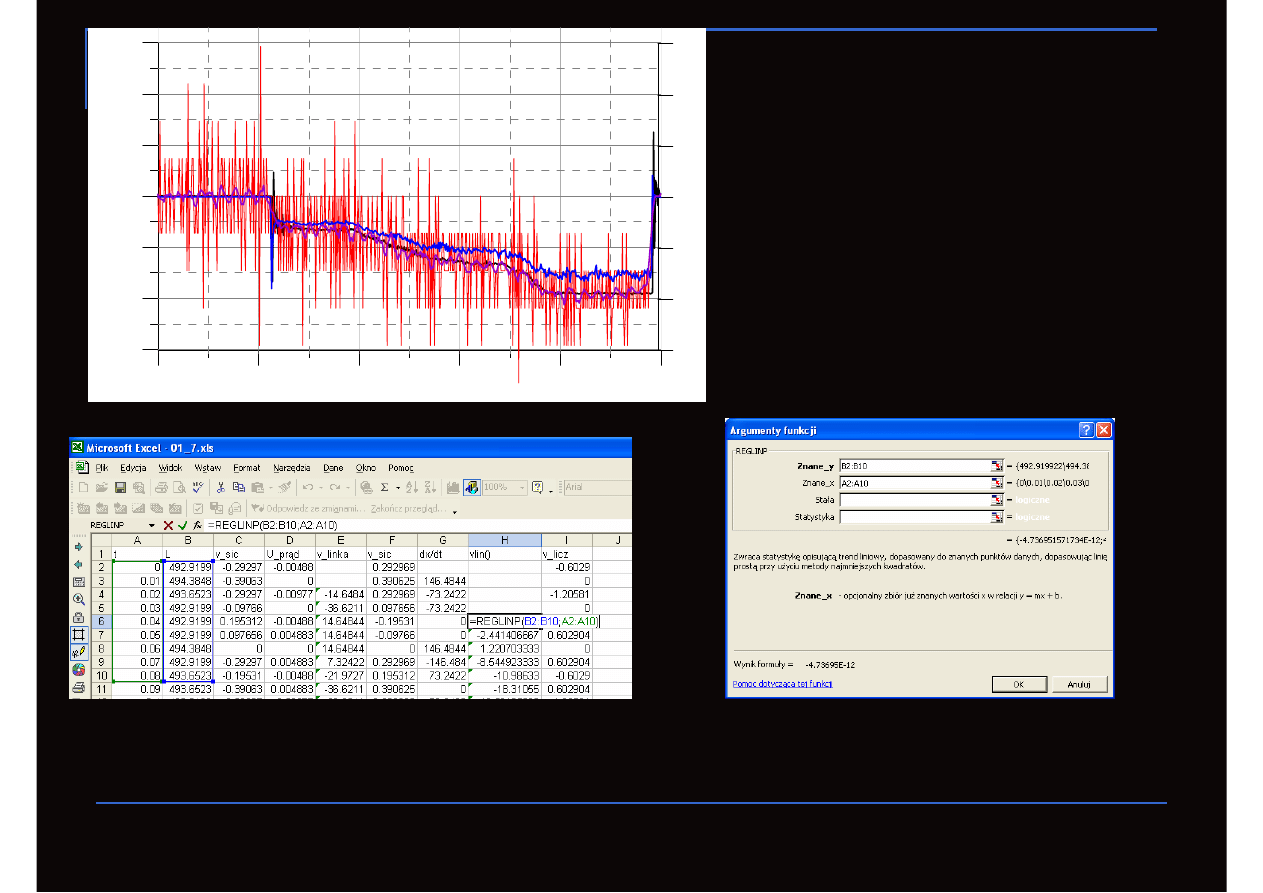
Określenie prędkości wykorzystując operacje różniczkowania przesunięcia dla trzech
wybranych zakresów pomiaru punktów regesji,
2.
Sporządzić charakterystyki czasowe wszystkich mierzonych parametrów dla
poszczególnych czujników, tzn:
1.
wykres przemieszczenia od czasu (czujnik linkowy)
2.
wykres prędkości od czasu dla dwóch czujników
3.
Określenie wartości średniej oraz rozrzutu wyniku pomiaru prędkości liniowej dla
wszystkich metod pomiarowych.
mgr in
ż
. Artur Guzowski
Katedra Maszyn Roboczych i Transportu Bliskiego
INSTYTU KONSTRUKCJI MASZYN M-3
Miernictwo Cieplne i Maszynowe
poniedziałek, 4 stycznia 2010
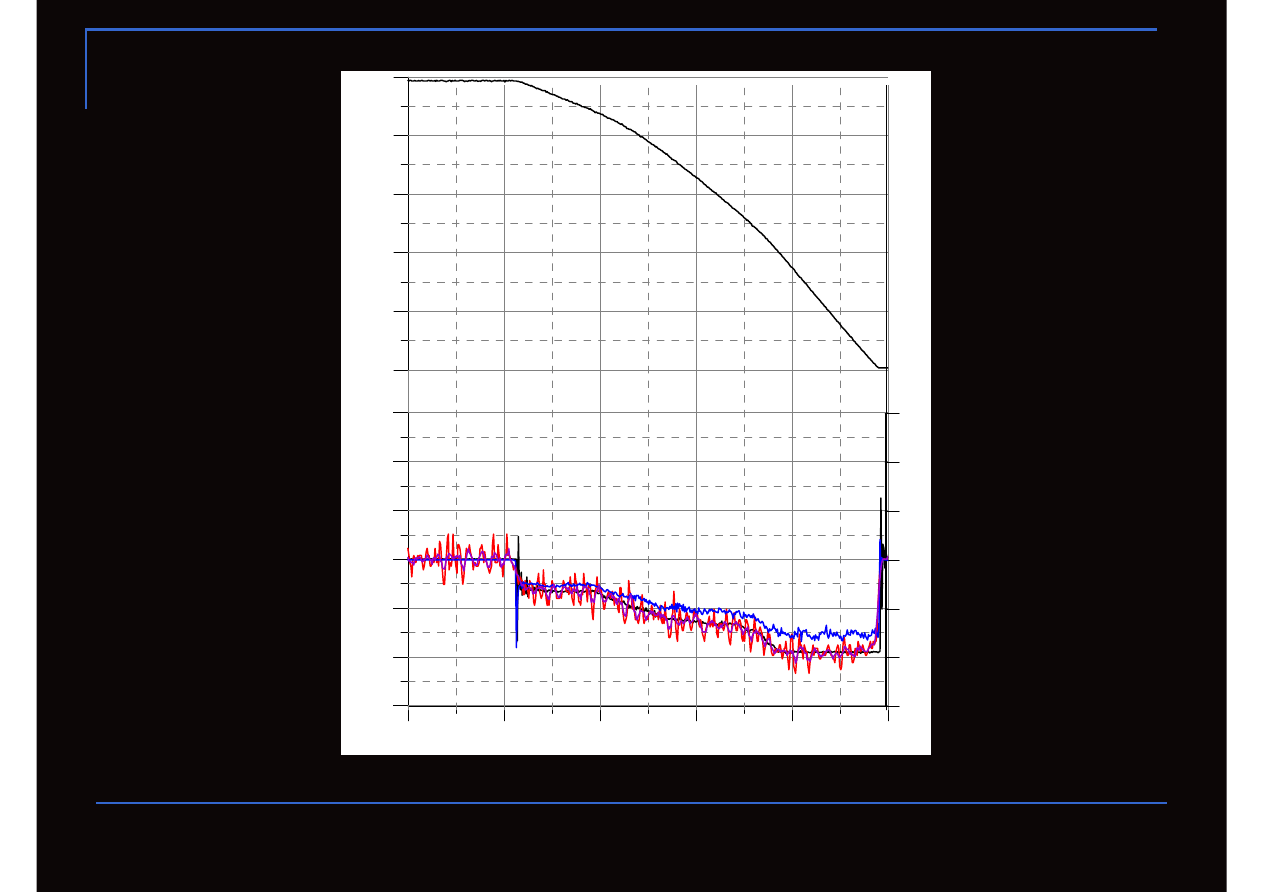
25
26
27
28
29
30
t [s]
0
100
200
300
400
500
L
[
m
m
]
-300
-200
-100
0
100
200
300
v
s
,
v
L
[
m
m
/s
]
-3
-2
-1
0
1
2
3
U
[
V
]
3p
9p
mgr in
ż
. Artur Guzowski
Katedra Maszyn Roboczych i Transportu Bliskiego
INSTYTU KONSTRUKCJI MASZYN M-3
Miernictwo Cieplne i Maszynowe
poniedziałek, 4 stycznia 2010
25
26
27
28
29
30
t [s]
-300
-200
-100
0
100
200
300
v
s
,
v
L
[
m
m
/s
]
-3
-2
-1
0
1
2
3
U
[
V
]
9p
v = dx/dt
Wyszukiwarka
Podobne podstrony:
MC Pomiar prędkości liniowej
MC Pomiar przemieszczenia liniowego
MC Pomiar prędkości obrotowej (2)
MC Pomiar przemieszczenia liniowego
MC Pomiar przemieszczenia liniowego
ćw 2 Pomiary przemieszczeń liniowych i grubości
POMIARY PRĘDKOŚCI
Precyzyjne pomiary prędkości radialnych gwiazd
Pomiar prędkości statków log
33 Pomiar prędkości dźwięku na podstawie efektu Dopplera
Badanie właściwości przetworników prędkości liniowej
Pomiar prędkości rurką Prandtla i wpływ skośnego ustawienia rurki
Pomiary przemieszczen liniowych CW3
Pomiary predkosci lab doc
Ćw 4 Pomiary prędkości obrotowej
12 Pomiary prędkości kątowej
Metody pomiaru predkosci
więcej podobnych podstron