Rachunek prawdopodobieństwa i statystyka matematyczna
1. Definicja prawdopodobieństwa (aksjomatyczna).
2. Własności dystrybuanty.
3. Sprawdzić, czy funkcja
)
2
1
)
(
(
1
)
(
x
arctg
x
F
może być dystrybuantą rozkładu
prawdopodobieństwa.
4. Definicja prawdopodobieństwa warunkowego.
5. Udowodnić, że
0
)
(
P
.
6. Udowodnić, że
)
(
1
)
(
A
P
A
P
7. Udowodnić, że dla dowolnych dwóch zdarzeń
)
(
)
(
)
(
)
(
B
A
P
B
P
A
P
B
A
P
.
8. Udowodnić, że: jeśli
,
B
A
to
)
(
)
(
B
P
A
P
.
9. Sformułować i udowodnić twierdzenie o prawdopodobieństwie zupełnym.
10. Sformułować i udowodnić twierdzenie Bayesa.
11. Definicja zmiennej losowej .
12. Udowodnić, że
)
(
)
(
)
(
a
X
P
b
X
P
b
X
a
P
.
13. Rozkład Bernoulliego
14. Rozkład Poissona
15. Rozkład normalny
16.Napisać funkcję gęstości zmiennej losowej o rozkładzie normalnym z wartością oczekiwaną 5 i
odchyleniem standardowym 7.
17. Podać wartość oczekiwaną, wariancję, wartość modalną i medianę zmiennej losowej, której
funkcja gęstości wyraża się wzorem
8
2
5
2
2
1
)
x
(
e
)
x
(
f
18. Parametry zmiennych losowych (średnia, wariancja, odchylenie standardowe, mediana i
wartość modalna).
19. Udowodnić, że jeśli zmienna losowa X ma wartość oczekiwaną m i odchylenie standardowe
, to
zmienna losowa
m
X
Y
ma wartość oczekiwaną zero i odchylenie standardowe 1.
20. Udowodnić, że jeśli zmienna losowa X ma wartość oczekiwaną 7 i odchylenie standardowe 2, to
zmienna losowa
2
7
X
Y
ma wartość oczekiwaną zero i odchylenie standardowe 1.
21. Twierdzenie Poissona (dowód)
22. Zmienne losowe typu skokowego. Rozkład zmiennej losowej typu skokowego.
23. Zmienne losowe typu ciągłego. Rozkład zmiennej losowej typu ciągłego.
24. Twierdzenie Linderberga-Levy’ego
25. Określenie populacji i próby
26. Definicja i własności estymatorów punktowych.
27. Wyprowadzić wzór na estymator wartości oczekiwanej.
28. Udowodnić, że średnia arytmetyczna jest nieobciążonym estymatorem wartości oczekiwanej.
29. Udowodnić, że
n
)
x
(
D
2
2
30. Wyprowadzić wzór na przedział ufności dla wartości oczekiwanej na podstawie próby z populacji o
rozkładzie normalnym ze znanym odchyleniem standardowym.
1. Definicja prawdopodobieństwa (aksjomatyczna)
Prawdopodobieństwem nazywamy funkcję, która każdemu zdarzeniu A ⊂ Ω przyporządkowuje liczbę
P(A) tak, aby spełnione były warunki:
1. P(A) ≥ 0 dla każdego A∈K
2. P(Ω) = 1
3. Jeśli A ∩ B = ϕ, to P(A∪B) = P(A) + P(B)
zdarzenie elementarne - najprostszy wynik doświadczenia losowego, tzn. zdarzenie losowe, którego nie
da się rozłożyć na zdarzenia prostsze.
Ω - zbiór zdarzeń elementarnych
K – zbiór zdarzeń: σ- ciało na zbiorze Ω
σ- ciało - Przestrzeń mierzalna – zbiór z określoną rodziną jego do której należy zbiór
pusty oraz dopełnienia wszystkich jej elementów, a ponadto należy do niej suma dowolnej przeliczalnej
rodziny jej elementów.
2. Własności dystrybuanty
Dystrybuantą nazywany funkcję F która spełnia 3 warunki:
1. F jest funkcją niemalejącą
2. lim
x→−∞
F(x) = 0 lim
x→∞
F(x) = 1
3. F jest funkcją lewostronnie ciągłą (granica funkcji w punkcie = punktowi: lim
x→x
0
F(x) = F(x
0
) )
Dystrybuanta – w rachunku prawdopodobieństwa, statystyce i dziedzinach pokrewnych, funkcja
rzeczywista jednoznacznie wyznaczająca rozkład prawdopodobieństwa.
3. Sprawdzić, czy funkcja
)
2
1
)
(
(
1
)
(
x
arctg
x
F
może być dystrybuantą rozkładu
prawdopodobieństwa.
)
2
1
)
(
(
1
)
(
x
arctg
x
F
1
:
F’(x) =
1
π
∗
1
1+x
2
- dla każdego xϵR F’(x)>0, więc funkcja jest rosnąca.
2: lim
x→−∞
)
2
1
)
(
(
1
x
arctg
=
1
π
(−
π
2
+
π
2
) = 𝟎
(przy tym pytaniu trzeba wiedzieć skąd się wzięło
π
/2 i –
π
/2 w limesie)
lim
x→∞
)
2
1
)
(
(
1
x
arctg
=
1
π
(
π
2
+
π
2
) = 𝟏
3: z analizy funkcja arctg jest ciągła, więc jest też lewostronnie ciągła
4. Definicja prawdopodobieństwa warunkowego.
Jeśli P(B)>0, to P(A/B) =
P(A∩B)
P(B)
1. P(A ∩ B) ≥ 0, P(B) > 0 → P(A B
⁄ ) ≥ 0
2. P(Ω B
⁄ ) =
P(Ω∩B)
P(B)
=
P(B)
P(B)
= 1
3. A
1
,A
2
,… A
i
∩A
j
= ∅
i ≠ j
P((A
1
, A
2
, … ) B
⁄ ) =
P((A
1
∪ A
2
∪ … ) ∩ B)
P(B)
=
P(A
1
∩ B) ∪ P(A
2
∩ B) ∪ …
P(B)
=
P(A
1
∩ B)
P(B)
+
P(A
2
∩ B)
P(B)
+ ⋯ = P(A
1
B
⁄ ) + P(A
2
B
⁄ ) + ⋯
Jeżeli P(A/B) = P(A) to o zdarzeniach A i B mówimy, że są niezależne.
5. Udowodnić, że P(ϕ) = 0.
P(ϕ) = 0
ϕ = ϕ ∪ ϕ ∪ ϕ ∪ ϕ ∪ ϕ ∪ …
P(ϕ) = P(ϕ ∪ ϕ ∪ … ) , ponieważ zdarzenia niemożliwe ϕ są rozłączne (wzajemnie się wykluczają):
P(ϕ) = P(ϕ) + P(ϕ) + P(ϕ) + ⋯
P(ϕ) = 0
6.Udowodnić, że
)
(
1
)
(
A
P
A
P
)
(
1
)
(
A
P
A
P
A ∪ A
̅ = Ω
P(A ∪ A
̅ ) = Ω A ∩ A̅ = ∅
P(A
̅ ) + P(A) = 1
)
(
1
)
(
A
P
A
P
c.n.d.
7.Udowodnić, że dla dowolnych dwóch zdarzeń
)
(
)
(
)
(
)
(
B
A
P
B
P
A
P
B
A
P
P(A ∪ B) = P(A) + P(B) − P(A ∩ B)
A ∪ B = B ∪ (A − B) = B ∪ (A ∩ B
′
)
A = (A ∩ B) ∪ (A − B) = (A ∩ B) ∪ (A ∩ B
′
)
P(A ∪ B) = P(B ∪ (A ∩ B
′
))
P(A) = P((A ∩ B) ∪ (A ∩ B
′
))
B i A∩B’ oraz (A ∩ B) i (A ∩ B
′
) wzajemnie się wykluczają, więc:
P(A ∪ B) = P(B) + P(A ∩ B
′
)
P(A) = P(A ∩ B) + P(A ∩ B
′
)
P(A ∩ B
′
) = P(A) − P(A ∩ B)

P(A ∪ B) = P(A) + P(B) − P(A ∩ B) c.n.d.
8.Udowodnić, że: jeśli
,
B
A
to
)
(
)
(
B
P
A
P
Tw.
B
A
→
)
(
)
(
B
P
A
P
B = A ∪ (B − A) = A ∪ (B ∪ A
′
)
P(B) = P(A ∪ (B ∩ A
′
)) = P(A) + P(B ∩ A
′
) ≥ P(A) c.n.d.
9.Sformułować i udowodnić twierdzenie o prawdopodobieństwie zupełnym
Tw. Jeśli zdarzenia A
1
, A
2
,… tworzą układ zupełny zdarzeń, oraz P(Ai)>0 (i=1,2,3…),
to dla dowolnego zdarzenia B zachodzi równość:
P(B) = P(A
1
)P(B A
1
⁄ ) + P(A
2
)P(B A
2
⁄ ) + ⋯
Wyjaśnienie – tworzą układ zupełny zdarzeń, tzn.
A
1
∪ A
2
∪ A
3
∪ … = Ω A
i
∩ A
j
= ∅ dla i ≠ j
Dowód:
A
1
, A
2,
A
3
– układ zupełny zdarzeń, P(Ai)>0
P(B) = P(B ∩ Ω) = P(B) ∩ (A
1
∪ A
2
∪ A
3
∪ … ) = P((B ∩ A
1
) ∪ (B ∩ A
2
) ∪ (B ∩ A
3
))
= P(B ∩ A
1
) + P(B ∩ A
2
) + ⋯ = P(A
1
)P(B A
1
⁄ ) + P(A
1
)P(B A
1
⁄ ) + ⋯
Ostatnie przejście na mocy definicji prawdopodobieństwa warunkowego:
P(A/B) =
P(A∩B)
P(B)
, więc P(A ∩ B) = P(B)P(A B
⁄ )
10. Sformułować i udowodnić twierdzenie Bayesa
Jeśli zdarzenia A
1
, A
2
, A
3
… tworzą układ zupełny zdarzeń (A
1
∪ A
2
∪ A
3
∪ … = Ω ; A
i
∩ A
j
= ∅ dla i ≠ j)
oraz P(A
i
)>0 (i=1,2,3…), i mamy zdarzenie B, takie że P(B)>0, to dla każdego zdarzenia A
j
(j=1,2,3…)
zachodzi równość zwana wzorem Bayesa:
P(A
j
B
⁄ ) =
P(A
j
)P(B A
j
⁄ )
P(B)
Dowód:
P(B ∩ A
j
) = P(A
j
) P(B /A
j
) z tw. o prawdopodobieństwie warunkowym
P(B ∩ A
j
) = P(B) P(A
j
/ B)
P(A
j
) P(B /A
j
) = P(B) P(A
j
/ B)
P(A
j
/ B) =
P(A
j
)P(B A
j
⁄ )
P(B)
c.n.d.
11.Definicja zmiennej losowej
Niech (Ω, K, P) będzie przestrzenia probabilistyczną.
Zmienną losową nazywamy każda funkcje
ξ
określoną na przestrzeni zdarzeń elementarnych, przyjmująca
wartości rzeczywiste, taka, ze dla każdej liczby rzeczywistej x zbiór zdarzeń elementarnych ω
spełniających warunek ξ (ω) < x jest zdarzeniem losowym, tzn. należy do rodziny K.
Tzn.
ξ: Ω → ℝ
nazywamy zmienną losowa, jeżeli:
⋀{ω ∈ Ω: ξ(ω) < x} ∈ K
x∈R
K – zbiór zdarzeń: σ- ciało na zbiorze Ω
σ- ciało - Przestrzeń mierzalna – zbiór z określoną rodziną jego do której należy zbiór
pusty oraz dopełnienia wszystkich jej elementów, a ponadto należy do niej suma dowolnej przeliczalnej
rodziny jej elementów.
12.Udowodnić, że
)
(
)
(
)
(
a
X
P
b
X
P
b
X
a
P
Przyjmijmy, że A: X<a B: a ≤ X < b C: X<b
(A∪B) = C
P(A∪B) = P(C)
A∩B = ∅, więc P(A) + P(B) = P(C)
P(B) = P(C) - P(A) c.n.d.
13.Rozkład Bernoulliego
Rozkład Bernoulliego (dwumianowy) to dyskretny (ze zbioru przeliczalnego) rozkład prawdopodobieństwa
opisujący liczbę sukcesów k w ciągu n niezależnych prób, z których każda ma stałe prawdopodobieństwo
sukcesu równe p. Pojedynczy eksperyment nosi nazwę próby Bernoulliego.
ξ
k=0,1,2,3,…,n
Jeżeli:
P(ξ = k) = (
n
k
) p
k
(1 − p)
n−k
To mówimy, że zmienna losowa ξ ma rozkład Bernoulliego.
m=n*p σ
2
=np-(1-p)
14.Rozkład Poissona
Rozkład Poissona jest dyskretnym rozkładem prawdopodobieństwa, wyrażającym prawdopodobieństwo
szeregu wydarzeń mających miejsce w określonym czasie, gdy te wydarzenia występują ze znaną średnią
częstotliwością i w sposób niezależny od czasu jaki upłynął od ostatniego zajścia takiego zdarzenia.
Zmienna losowa ma rozkład Poissona jeśli zmienna ξ przyjmuje wartości k=0,1,2,3,... i ich
prawdopodobieństwo wynosi
P(ξ = k) =
λ
k
k!
e
−λ
m=
λ
λ ≡ const. > 0; λ – oczekiwana liczba zdarzeń w danym przedziale czasu;
15.Rozkład normalny
O zmiennej losowej ciągłej powiemy, że posiada rozkład normalny, jeżeli funkcja gęstości f(x) tego
rozkładu ma postać:
f(x) =
1
σ√2π
e
−(x−m)
2
2σ
2
Fakt, że zmienna losowa ξ ma rozkład normalny z wartością oczekiwaną m i wariancją σ
2
zapisuje się
często ξ ~ N(m, σ).
Jeśli m = 0 i σ = 1, to rozkład ten nazywa się standardowym rozkładem normalnym.
Dystrybuanta:
F(x) =
1
σ√2π
∫ e
−(x−m)
2
2σ
2
x
−∞
16.Napisać funkcję gęstości zmiennej losowej o rozkładzie normalnym z wartością oczekiwaną 5 i
odchyleniem standardowym 7
N(5,7) -> m=5, σ = 7
f(x) =
1
σ√2π
e
−(x−m)
2
2σ
2
f(x) =
1
7√2π
e
−(x−5)2
2∗72
=
1
7√2π
e
−(x−5)2
98
17.Podać wartość oczekiwaną, wariancję, wartość modalną i medianę zmiennej losowej, której funkcja
gęstości wyraża się wzorem
8
2
5
2
2
1
)
x
(
e
)
x
(
f
m=5, σ = 2 -> N(5,2)
Wartość oczekiwana: 5
Mediana: 5
Wartość modalna: 5
Wariancja: 2
2
=4
18.Parametry zmiennych losowych (średnia, wariancja, odch. standardowe, mediana i wartość
modalna)
Wariancja: Niech (Ω, K, P) będzie przestrzenią probabilistyczną, zaś
- zmienną losową,
posiadającą skończoną wartość oczekiwaną m = E(X). Wariancją zmiennej losowej X nazywamy liczbę:
Mediana: P(ξ ≤ x) ≤
1
2
< P(ξ ≥ x)
Dla zmiennej typu ciągłego:
Średnia (wartość oczekiwana)
m = ∫ xf(x)dx
∞
−∞
Wariancja
σ
2
= ∫(x − m)
2
f(x)dx
∞
−∞
Odchylenie standardowe
σ = √ ∫(x − m)
2
f(x)dx
∞
−∞
Mediana
Funkcja gęstości przyjmuje wartość
1
2
Wartość modalna
Max dla funkcji gęstości.
Dla zmiennej losowej typu skokowego
Średnia (wartość oczekiwana)
m = ∑ x
i
p
i
i
Wariancja
σ
2
= ∑(x − m)
2
p
i
i
Odchylenie standardowe
σ = √∑(x − m)
2
p
i
i
Mediana
Środkowy element, w posortowanym ciągu x.
Wartość modalna
Taki x, dla którego prawdopodobieństwo p jest największe.
19.Udowodnić, że jeśli zmienna losowa X ma wartość oczekiwaną m i odchylenie standardowe
, to
zmienna losowa
m
X
Y
ma wartość oczekiwaną zero i odchylenie standardowe 1.
Y =
X−m
σ
E(x)=m D
2
(x)=
σ
2
E(Y) = E (
X−m
σ
) =
1
σ
E(X − m) =
1
σ
(E(x) − m) =
1
σ
(m − m) = 0
D
2
(Y) = D
2
(
X−m
σ
) =
1
σ
2
D
2
(X − m) =
1
σ
2
D
2
(X) =
1
σ
2
σ
2
= 1
20.Udowodnić, że jeśli zmienna losowa X ma wartość oczekiwaną 7 i odchylenie standardowe 2, to
zmienna losowa
2
7
X
Y
ma wartość oczekiwaną zero i odchylenie standardowe 1.
Y =
X−7
2
E(x)=7 D
2
(x)=
4
E(Y) = E (
X−7
2
) =
1
2
E(X − 7) =
1
2
(E(x) − 7) =
1
2
(7 − 7) = 0
D
2
(Y) = D
2
(
X−7
2
) =
1
2
2
D
2
(X − 7) =
1
2
2
D
2
(X) =
1
4
∗ 4 = 1
21. Twierdzenie Poissona (dowód)
Niech zmienna losowa X
n
ma rozkład Bernoulliego określony wzorem:
P(X
n
= k) = (
n
k
)p
n
k
(1 − p
n
)
n−k
k=0,1,2,3,…,n
p
n
- prawdopodobieństwo sukcesu dla określonej zmiennej losowej X
n
Jeśli prawdopodobieństwo p
n
maleje do 0 w ten sposób, że poczynając od pewnego n
0
:
⋀
np
n
= σ
n>n
0
,
gdzie σ ≡ const. > 0, to:
lim
n→∞
P(X
n
= k) =
σ
k
k!
e
−σ
Jeśli wykonujemy dużą liczbę doświadczeń zgodnych ze schematem Bernoulliego, a prawdopodobieństwo
sukcesu jest bliskie 0, to zamiast liczyć z rozkładu Bernoulliego liczymy z rozkładu Poissona.
Dowód: niech λ = np
n
lim
n→∞
P(X
n
= k) = lim
n→∞
(
n
k
)p
n
k
(1 − p
n
)
n−k
) = lim
n→∞
n!
k!(n−k)!
p
n
k 1−p
n
n
1−p
n
k
=
1
k!
lim
n→∞
(n − k + 1)(n − k +
2) ∗ … ∗ (n − 1) ∗ n ∗
λ
k
n
k
∗
(1−
λ
n
)
n
(1−
λ
n
)
k
=
λ
k
k!
lim
n→∞
(
n−k+1
n
) ∗ (
n−k+2
n
) ∗ … ∗ (
n−1
n
) ∗
n
n
∗
(1−
λ
n
)
n
(1−
λ
n
)
k
=
λ
k
k!
lim
n→∞
(1 −
k−1
n
)(1 −
k−2
n
) … (1 −
1
n
) ∗
[(1+
1
−n
λ
)
−n
λ
]
−λ
(1−
λ
n
)
k
=
λ
k
k!
e
−λ
c.n.d.
22. Zmienne losowe typu skokowego. Rozkład zmiennej losowej typu skokowego.
Skokowy (dyskretny) rozkład prawdopodobieństwa to w probabilistyce rozkład prawdopodobieństwa
zmiennej losowej dający się opisać przez podanie wszystkich przyjmowanych przez nią wartości, wraz z
prawdopodobieństwem przyjęcia każdej z nich. Przykład: rzut monetą lub rzut kostką.
+ wzory ze pkt 18
Zmienne losowe typu skokowego , np.: rzut kostką, zbiór wartości jest przeliczalny. Oznaczenie
prawdopodobieństwa to określenie prawdopodobieństw dla każdego ze zdarzeń.
23.Zmienne losowe typu ciągłego. Rozkład zmiennej losowej typu ciągłego.
Ciągły rozkład prawdopodobieństwa - rozkład prawdopodobieństwa dla którego dystrybuanta jest funkcją
ciągłą. Przykład: rozkład normalny.
+ wzory ze pkt 18
Zmienne losowe typu ciągłego, (zbiorem wartości jest zbiór liczb rzeczywistych). Są one
charakteryzowane przez funkcję gęstości .
24.Twierdzenie Linderberga-Levy’ego
Jeżeli X
n
jest ciągiem losowym niezależnych zmiennych o jednakowych rozkładach mających wartość
oczekiwaną m i wariancję σ
2
> 0, to ciąg losowy {U
n
}: U
n
=
1
σ√n
(∑
X
k
− nm)
n
k=0
jest zbieżny według
dystrybuant do zmiennej losowej o rozkładzie N(0,1). Czyli dla każdego U zachodzi relacja:
lim
n→∞
F
n
(U) =
1
√2π
∫ e
−
x
2
2
dx
U
−∞
= Φ(U)
E (∑ X
k
n
k=0
) = ∑ E(X
k
) =
n
k=0
∑ m =
n
k=0
nm
D
2
(∑ X
k
n
k=0
) = ∑ D
2
(X
k
) =
n
k=0
∑ σ
2
=
n
k=0
nσ
2
U
n
=
∑
x
k
− mn
n
k=0
σ√n
25.Określenie populacji i próby
Populacja - zbiór elementów podlegających badaniu statystycznemu.
Próbą jest część populacji spełniająca następujące warunki: musi być reprezentatywna i losowa .
Struktura próby musi być taka jak struktura badanej populacji.
26.Definicja i własności estymatorów punktowych.
Estymator – statystyka z próby obliczona celem uzyskania informacji o parametrach populacji generalnej.
Q – parametr populacji generalnej
Q
n
– jego estymator obliczony z próby n-elementowej
Q
n
= f(x
1
,x
2
,…) jest zmienną losową, Q NIE.
Inaczej: Wzory podające oszacowania (oceny) parametrów rozkładów teoretycznych (x,𝜎
2
, 𝜎 i innych)
nazywamy estymatorami.
Własności estymatorów:
Nieobciążoność – wartość średnia estymatora jest równa wartości parametru populacyjnego.
Zgodność – wraz ze wzrostem liczebności próby wartość estymatora zbliża się do parametru
Efektywność – miarą efektywności estymatora jest rozrzut otrzymywanych wartości, czyli wariancja;
najefektywniejszy estymator ma najmniejszą wariancję.
Dostateczność – estymator jest dostateczny, jeśli wykorzystuje całą informację o parametrze, jaka
zawarta jest w próbie.
parametr
estymator
średnia
m
𝑥̅
wariancja
σ
2
s
2
odchylenie standardowe
σ
s
modalna
m
o
𝑚𝑜
̂
mediana
m
e
𝑚𝑒
̂
27.Wyprowadzić wzór na estymator wartości oczekiwanej.
x
i
= m + ε
i
ε
i
− błąd losowy
∑
ε
i
2
→ min
n
i=1
– metoda najmniejszych kwadratów
Q(m) = ∑(x
i
− m)
2
n
i=1
→ min
Q
′
(m) = 2 ∑(x
i
− m) ∗ (−1) =
n
i=1
− 2 ∑(x
i
− m) = 0 | ∶ −2
n
i=1
∑(x
i
− m) = 0
n
i=1
∑(x
i
) −
n
i=1
∑(m) = 0
n
i=1
∑ (x
i
) − n ∗ m = 0
n
i=1
m =
1
n
∑ x
i
n
i=1
x̅ =
1
n
∑ x
i
n
i=1
28.Udowodnić, że średnia arytmetyczna jest nieobciążonym estymatorem wartości oczekiwanej.
E(x̅) = E (
1
n
∑
x
i
n
i=1
) =
1
n
E(∑
x
i
n
i=1
) =
1
n
∑
E(x
i
)
n
i=1
=
1
n
∑
m =
n
i=1
1
n
nm = m
c.n.d.
29.Udowodnić, że
n
)
x
(
D
2
2
D
2
(x
i
) = σ
2
D
2
(x̅) = D
2
(
1
n
∑
x
i
n
i=1
) =
1
n
2
D
2
(∑
x
i
n
i=1
) =
1
n
2
∑
D
2
(x
i
)
n
i=1
=
1
n
2
∑
σ
2
=
n
i=1
1
n
2
nσ
2
=
σ
2
n
c.n.d.
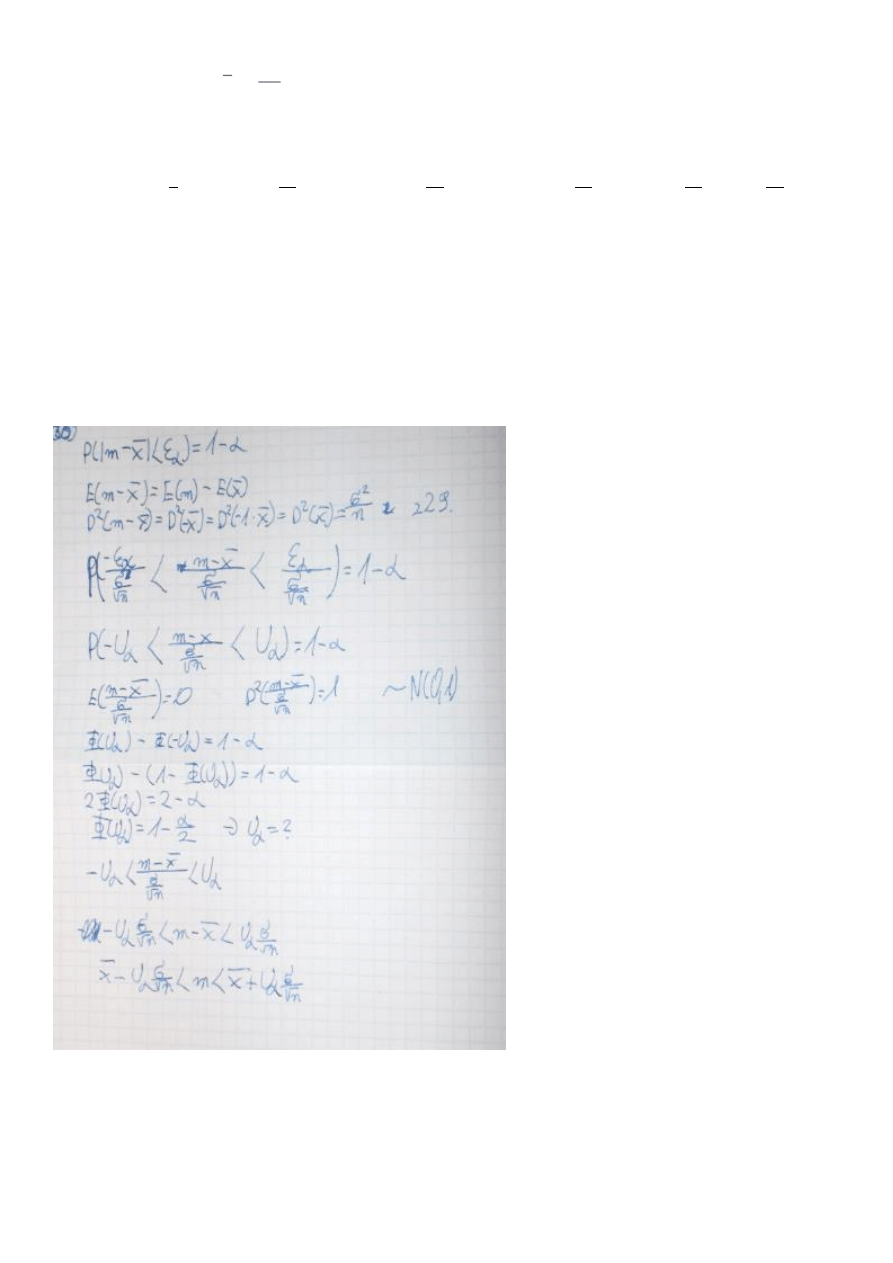
30.Wyprowadzić wzór na przedział ufności dla wartości oczekiwanej na podstawie próby z populacji o
rozkładzie normalnym ze znanym odchyleniem standardowym.
Wyszukiwarka
Podobne podstrony:
Statystyka - opracowane pyt 3(1), Nauka, statystyka
Metrologia statystyczne opracowanie wyników
ChMB kolokwium I opracowane zagadnienia by Owca
Probabilistic slope stability analysis by finite elements
Opracowanie TiME by?i
Analiza błędów Statystyczne opracowanie wyników pomiarów
02 opracowanie OŻE by BJ 11
PAiR Opracowanie Egzamin by Yanoo
Opracowanie z Elektrotechniki by MartaM(1), nauka, fizyka, FIZYKA-ZBIÓR MATERIAŁÓW
Opracowanie pytan (by GR)
Statystyka - opracowane pyt 5, Statystyka
laboratorium 9 i 10, Metody probabilistyczne i statystyka
pytania 27-30, ZUT, III Semestr, Metody probabilistyczne i statystyka
Statystyka-opracowane, Studia, Psychologia, SWPS, 2 rok, Semestr 04 (lato), Metodologia ze statystyk
opracowanie 2013, Studia, Informatyka, Semestr IV, Wstęp do sztucznej inteligencji
ZPI Egamin Opracowanie 2013
Opracowanie pytań by bartez3do druku
więcej podobnych podstron