Człowiek- najlepsza inwestycja
Projekt współfinansowany przez Unię Europejską
w ramach Europejskiego Funduszu Społecznego
Podstawy
Podstawy
Automatyki
Automatyki
Podstawy
Podstawy
Automatyki
Automatyki
Politechnika Warszawska
Instytut Automatyki i Robotyki
Dr inż. Wieńczysław Kościelny
PODSTAWY AUTOMATYKI
część 2
Układy z bloków funkcjonalnych
Układy z bloków funkcyjnych
3
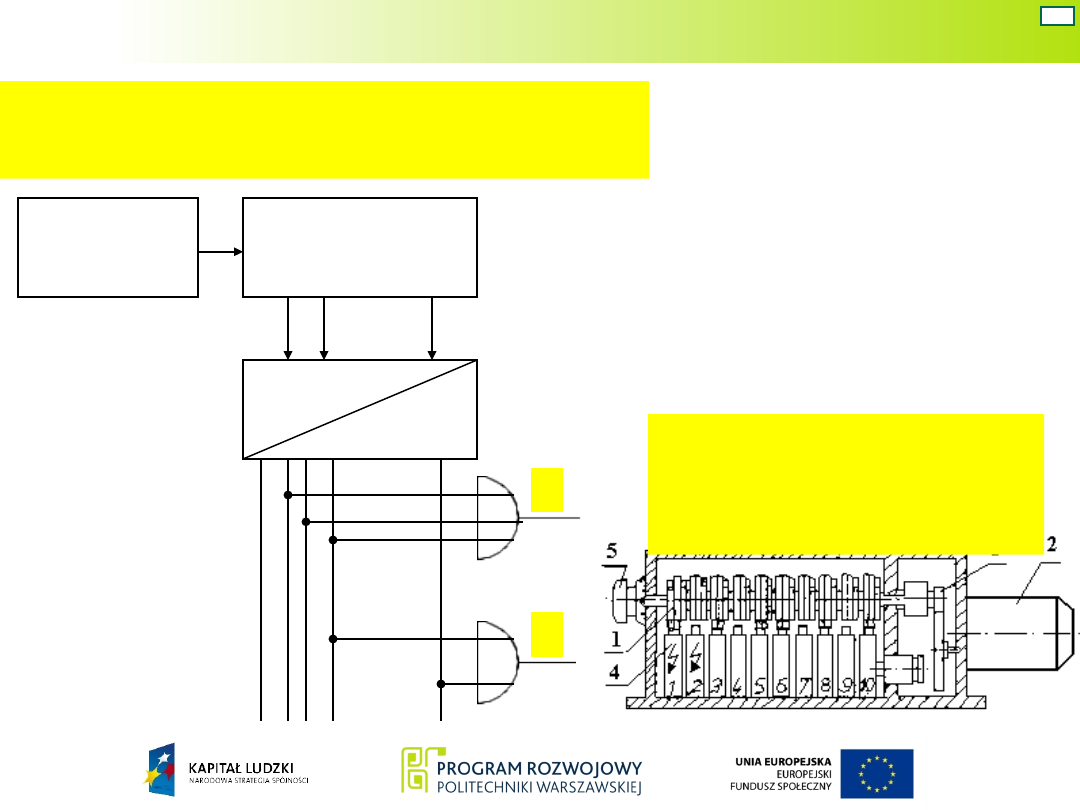
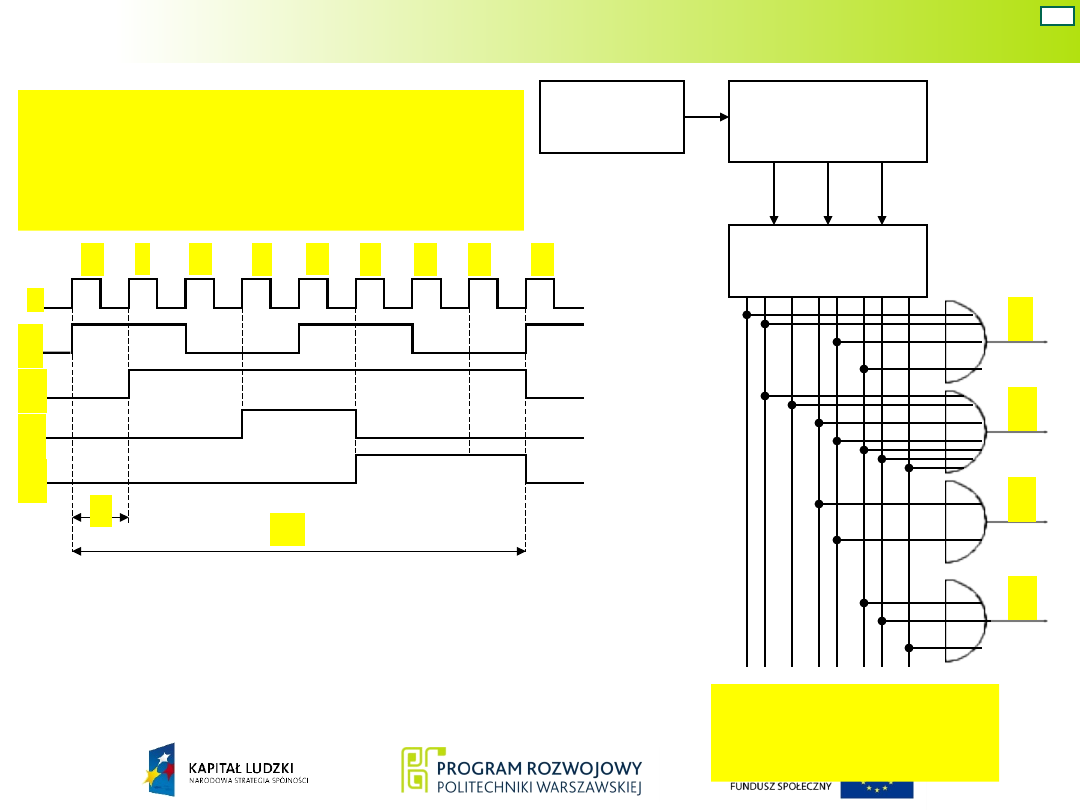
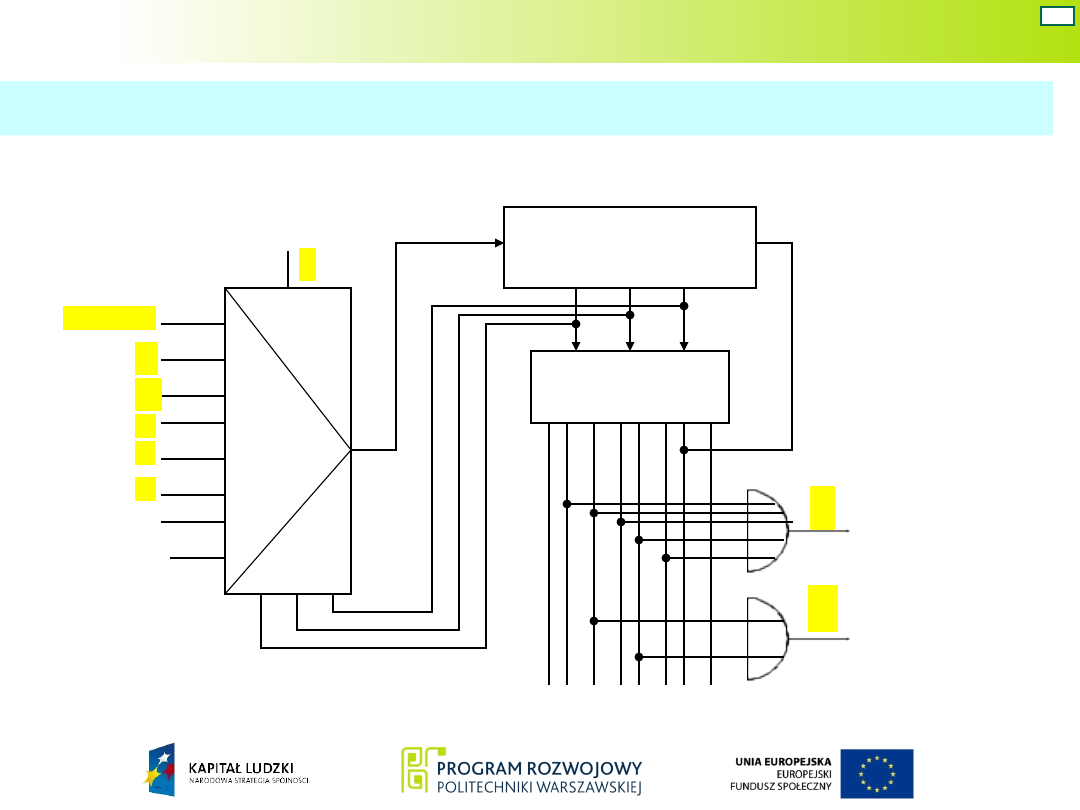
Struktura układu czasowo-zależnego
w realizacji elektronicznej i ......
Generato
r
impulsów
Licznik
impulsów
Q
n
Q
0
c
Dekoder
0 1 2 3
2
n
1
y
i
y
analogiczne
rozwiązanie
elektromechaniczne
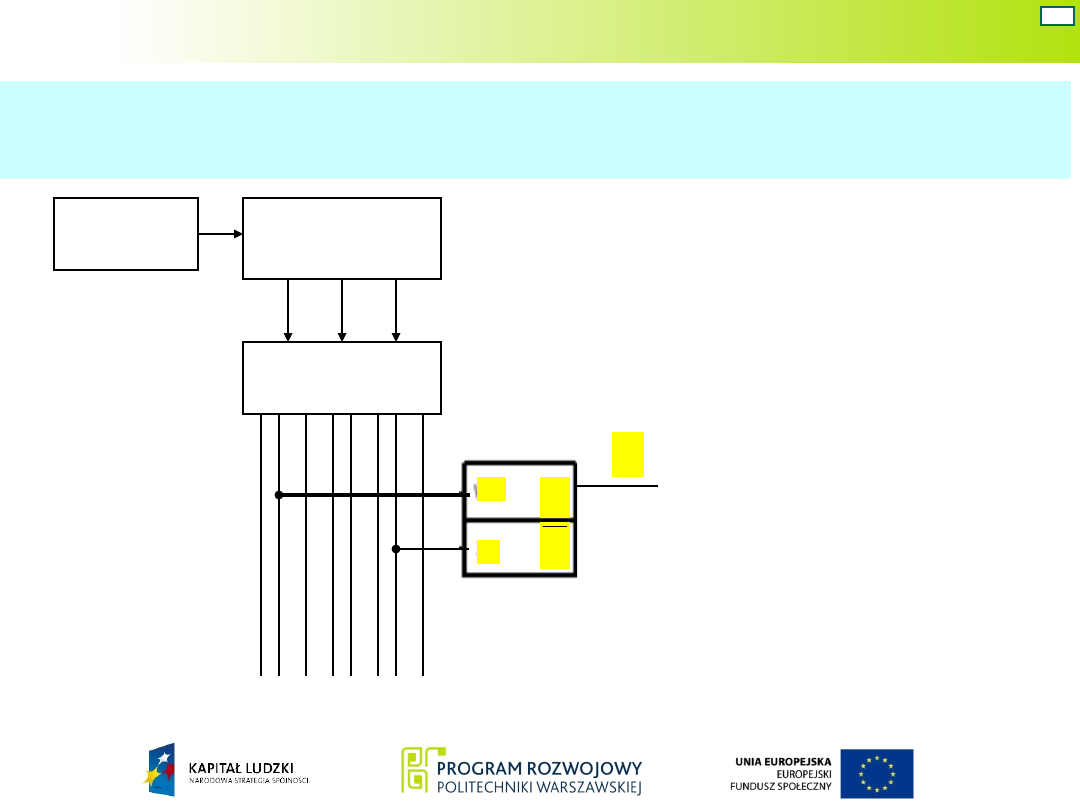
Układy z bloków funkcyjnych
4
Generato
r
Licznik
Q
2
Q
1
Q
0
c
Dekoder
0 1 2 3 4 5 6
7
i
y
Q
Q
z
w
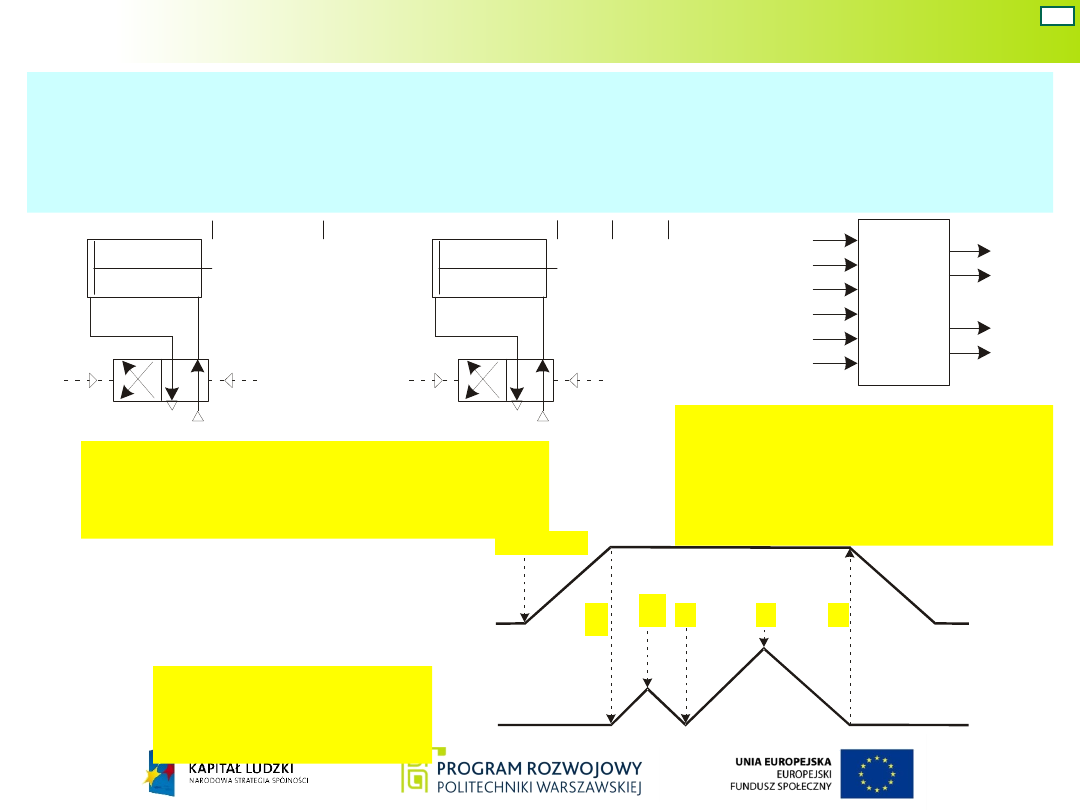
Możliwość wykorzystania przerzutnika do realizacji sygnałów
trwających wiele taktów
Układy z bloków funkcyjnych
5
Przykładowe przebiegi
sygnałów w układzie
czasowo-zależnym
Realizacja
układu
a)
1 2 3 4 5 6 7 8 1
c
y
y
2
2
T
8T
y
y
1
1
y
y
3
3
y
y
4
4
0 1 2 3 4 5 6 7 0
T
8
T
c
4
y
3
y
1
y
2
y
Generato
r
Licznik
Q
2
Q
1
Q
0
c
Dekoder
0 1 2 3 4 5 6
7
1
y
2
y
3
y
4
y
Układy z bloków funkcyjnych
6
Generato
r
Licznik
Q
2
Q
1
Q
0
c
Dekoder
0 1 2 3 4 5 6
7
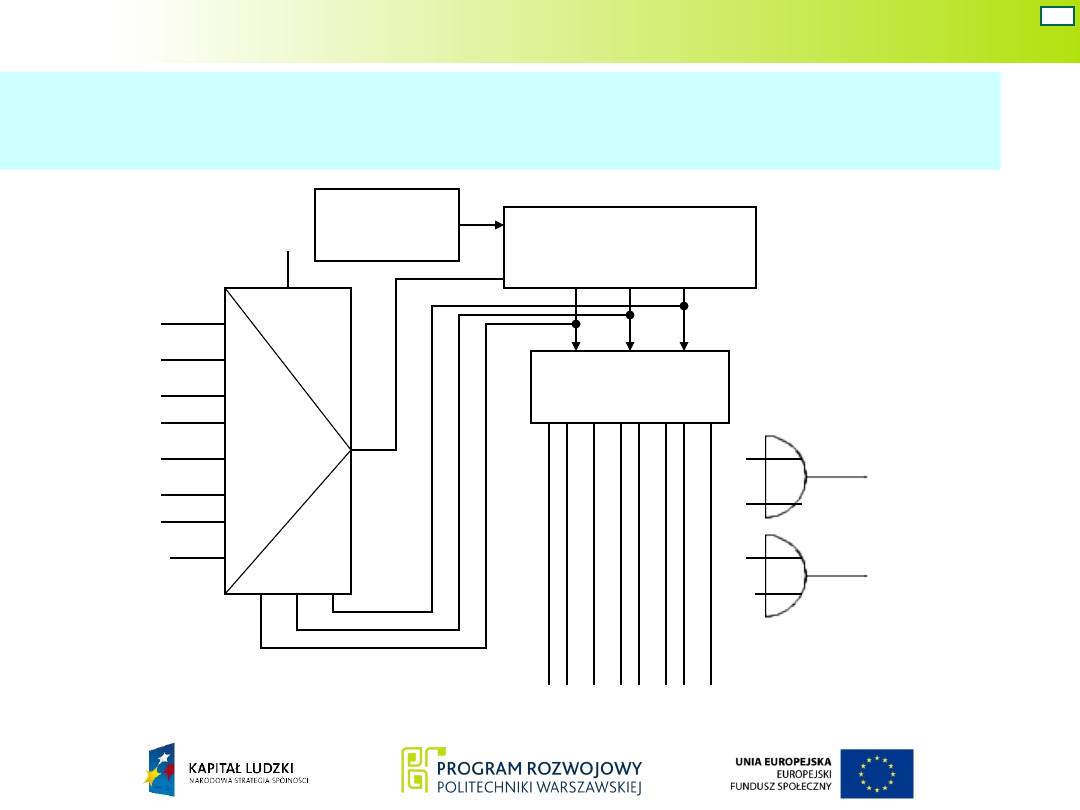
CE
R
A
2
A
1
A
0
0
1
2
3
4
5
6
7
S
1
y
i
y
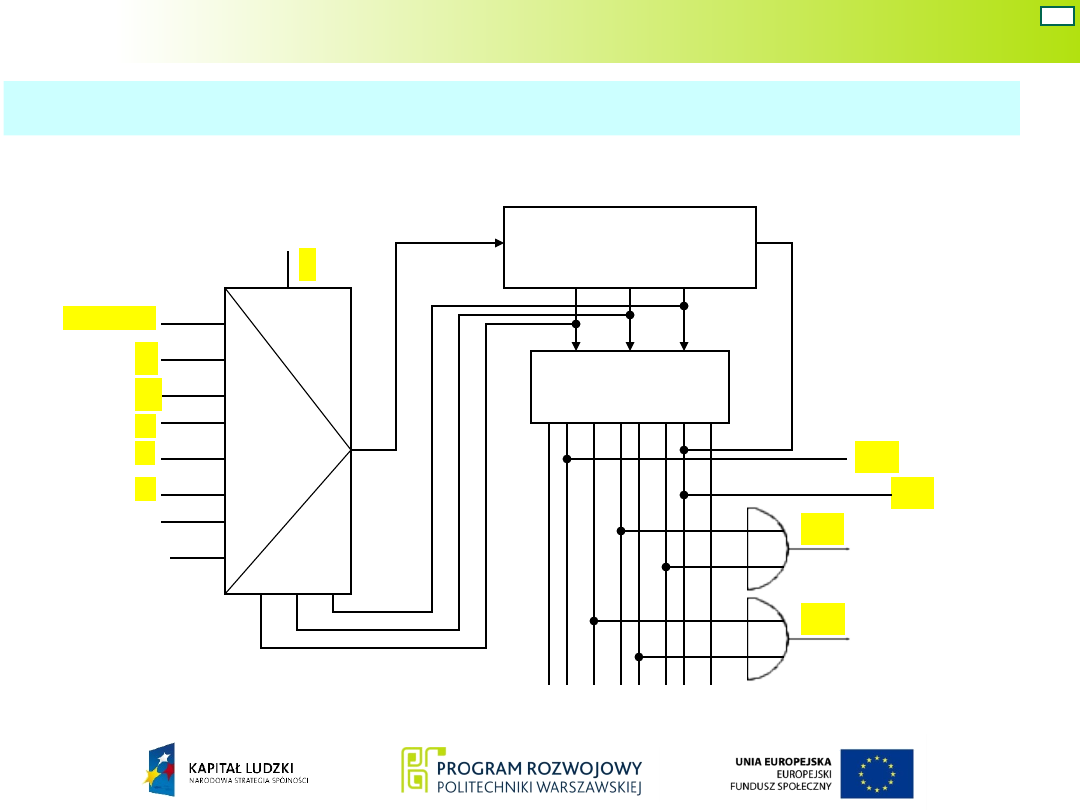
Struktura synchronicznego układu procesowo-zależnego
o liniowym programie pracy
Układy z bloków funkcyjnych
7
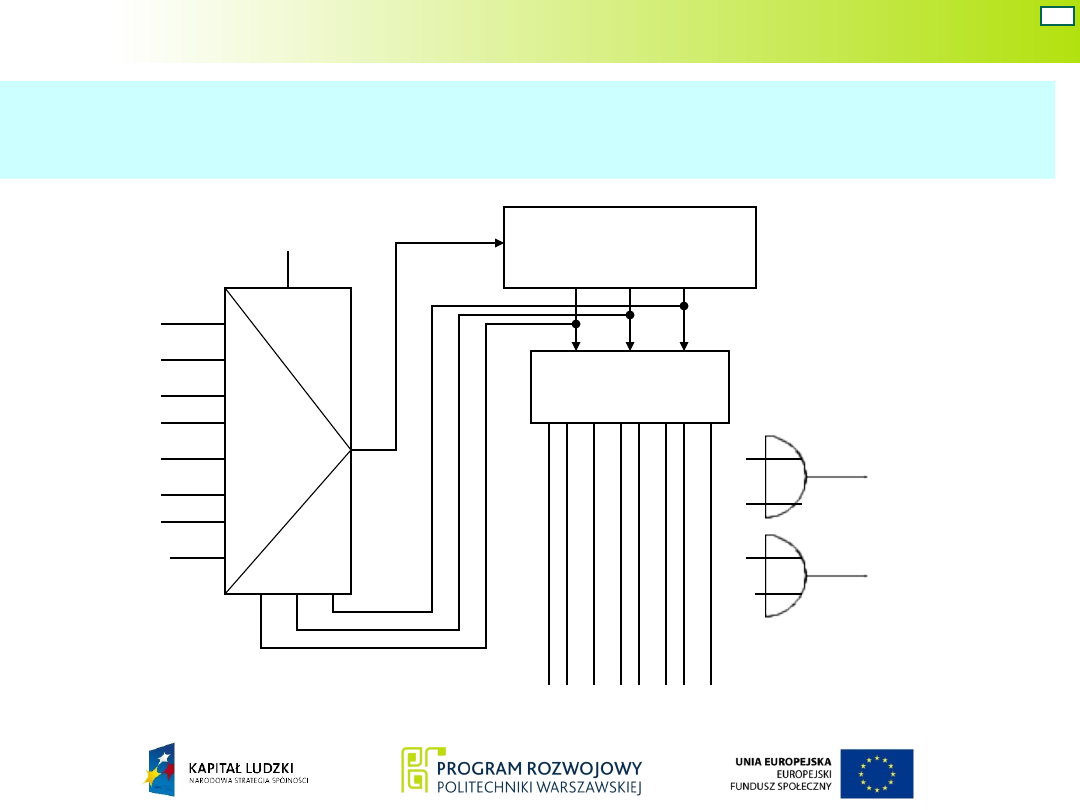
Struktura asynchronicznego układu procesowo-zależnego
o liniowym programie pracy
Licznik
Q
2
Q
1
Q
0
c
Dekoder
0 1 2 3 4 5 6
7
R
A
2
A
1
A
0
0
1
2
3
4
5
6
7
S
1
y
i
y
Układy z bloków funkcyjnych
8
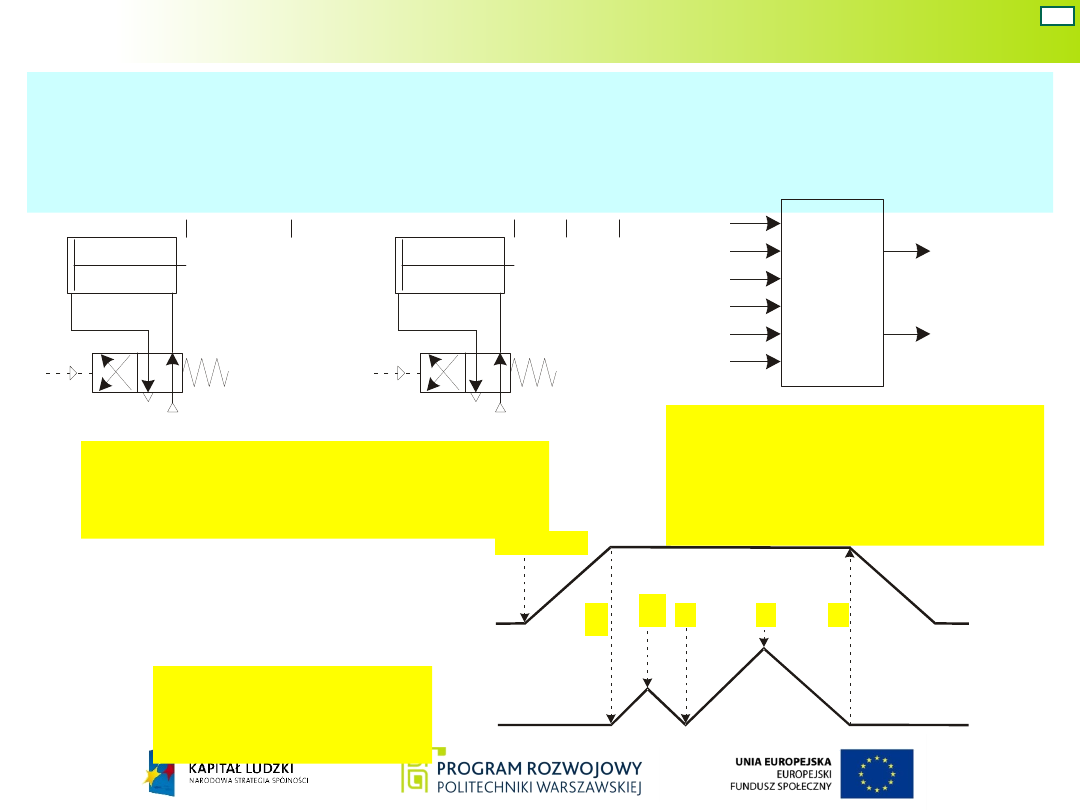
Przykład 1: układ sterujący powinien zapewnić
realizację cyklu pracy siłowników po
podaniu sygnału START (x)
a
b
c
d
e
x
y
1
y
2
A
B
a
b
e
c
d
y
1
y
2
Schemat układu
napędowego
Schemat blokowy
projektowanego
układu
x · a · c
d
c
e
b
c
Diagram
stanów
c
a
x
e
c
c
d
b
Układy z bloków funkcyjnych
9
Układ sterujący zaworami monostabilnymi do przykładu 1
Licznik
Q
2
Q
1
Q
0
c
Dekoder
0 1 2 3 4 5 6
7
R
A
2
A
1
A
0
0
1
2
3
4
5
6
7
S
1
y
2
y
c
a
x
b
d
c
e
c
1
Układy z bloków funkcyjnych
10
Przykład 2: układ sterujący powinien zapewnić
realizację cyklu pracy po podaniu sygnału
START (x)
x · a · c
d
c
e
b
c
Diagram
stanów
c
a
x
e
c
c
d
b
A
B
a
b
e
c
d
a
b
c
d
e
x
A +
B +
A -
B -
A +
A -
B +
B -
Schemat układu
napędowego
Schemat blokowy
projektowanego
układu
Układy z bloków funkcyjnych
11
Układ sterujący zaworami bistabilnymi do przykładu 2
Licznik
Q
2
Q
1
Q
0
c
Dekoder
0 1 2 3 4 5 6
7
R
A
2
A
1
A
0
0
1
2
3
4
5
6
7
S
B
B
c
a
x
b
d
c
e
c
1
A
A
Document Outline
Wyszukiwarka
Podobne podstrony:
11 uklady rownanid 12258 Nieznany (2)
11 Układy nieliniowe
Dział 11 układy zbiorowe pracy
Instrukcja 11 Uklady sterowania posredniego s
sem2 ZJAZD 11 UKLADY ROWNAN 2
sprawko ćw 5 Układy blokowe, Semestr 5, Automatyzacja i robotyzacja procesu produkcji
Układy blokowe, EiT, Elektryczność, Fizyka i Elektryczność
11 Układy zbiorowe pracy
11 Układy nieliniowe
Instrukcja 11 Układy sterowania pośredniego siłownikiem dwustronnego działania
Układy o stowarzyszeniu (11 stron) U6PQ73KYB5XXG6TC4GO2WJC7GUXFWGH332BNFIA
F2 35A Układy CMOS 11 Przerzutniki
11 PEiM Układy logiczne doc (2)
07.11.15 Układy urbanistyczne
więcej podobnych podstron