Piotr Kawalec
Wykład XV - 1
Wykład XV
Mikroprogramowane
układy sterujące
Technika cyfrowa
Piotr Kawalec
Wykład XV - 2
Technika cyfrowa
Mikroprogramowane układy
sterujące
W mikroprogramowanych układach
sterujących
realizowany mikroprogram
sterowania jest
określony nie przez
strukturę połączeń między
elementami
logicznymi, lecz przez zawartość
pamięci
Są to układy zawierające pamięć stałą
(ROM),
wktórej zapisano mikroprogram pracy
sterowanego urządzenia w postaci ciągu
słów
sterujących - mikrorozkazów
Najprostszą metodą realizacji takiego
automatu
sterującego jest zapisanie w
pamięci tablicy
przejść-wyjść automatu
Piotr Kawalec
Wykład XV - 3
Technika cyfrowa
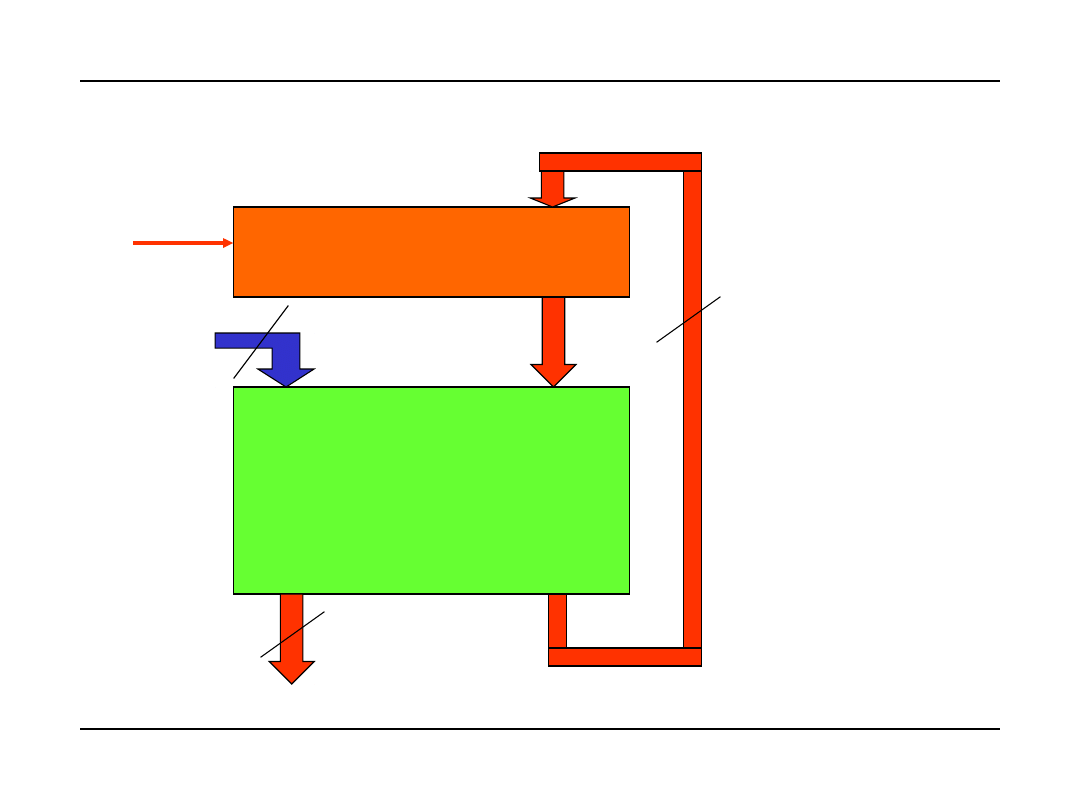
Struktura układu
mikroprogramowanego
X
clk
S
ROM
RM
n
m
k
RM - rejestr mikrorozkazów
Pojemność pamięci ROM
2
k+n
słów (k + m) bitowych
Układ nieefektywny ponieważ
przy przejściach
bezwarunkowych -
2
n
identycznych słów
jeden warunek -
2
n-1
identycznych słów
Piotr Kawalec
Wykład XV - 4
Technika cyfrowa
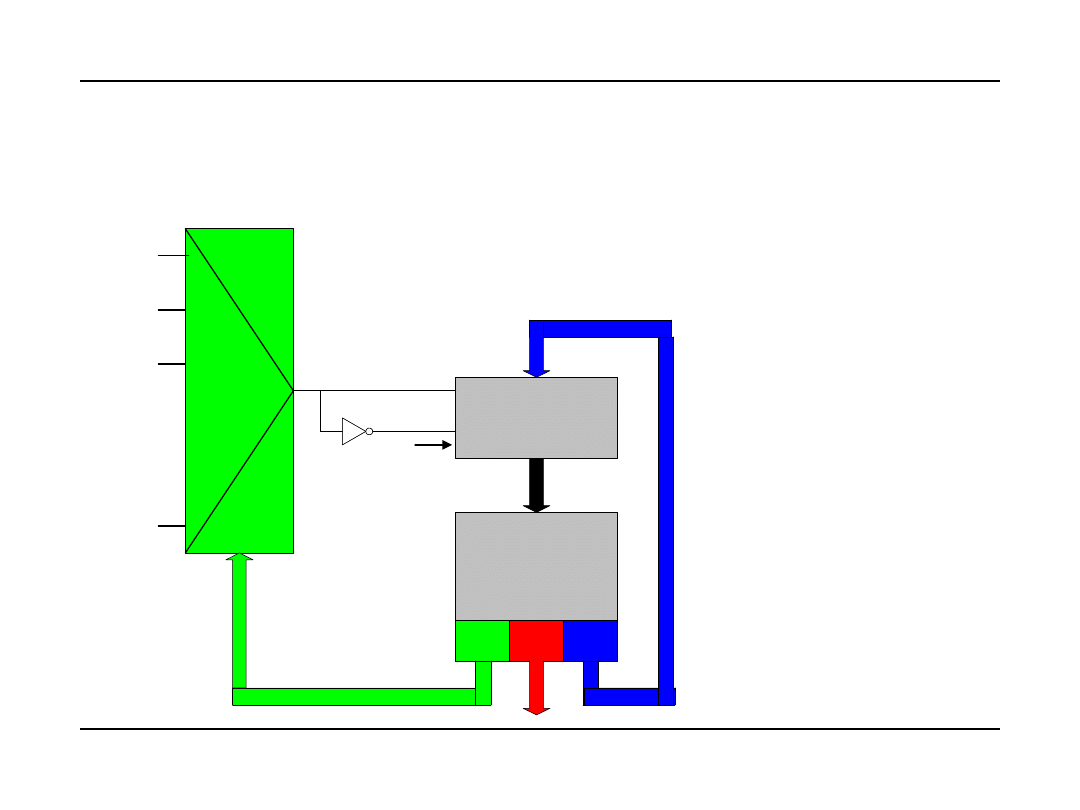
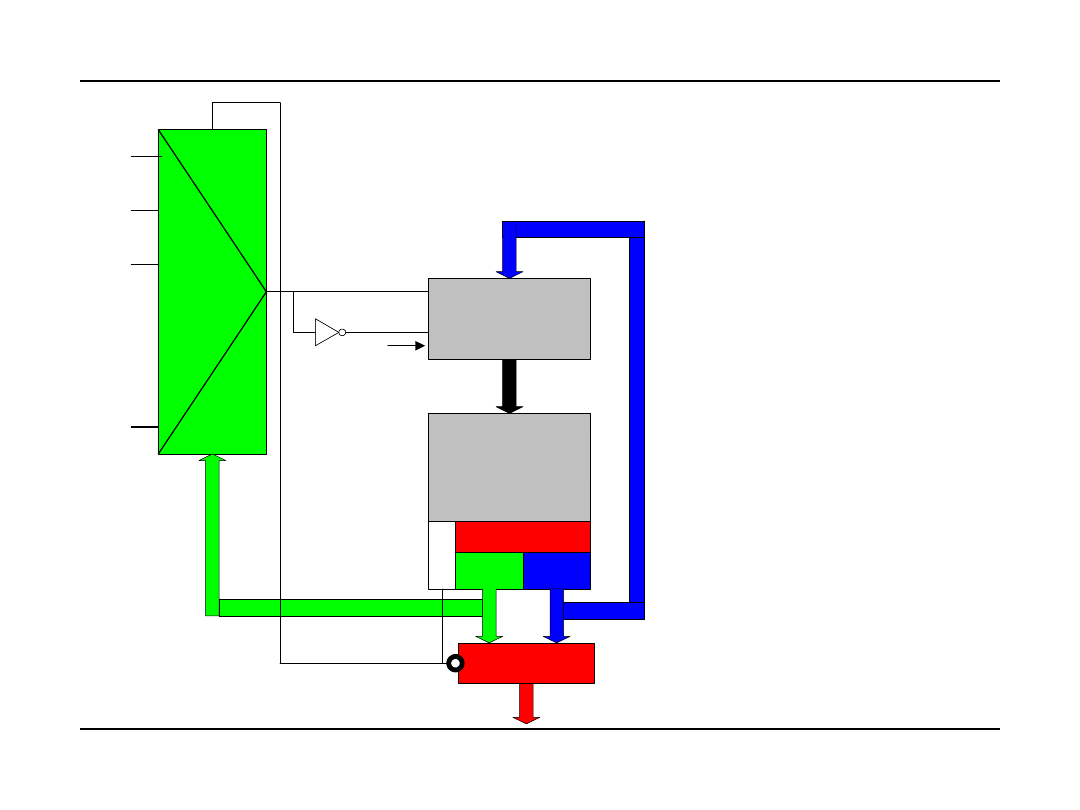
Podstawowy układ sterowania
mikroprogramowanego
S - pole sterujące
T - pole testowe
A - pole adresowe
Pamięć ROM ma
pojemność 2
k
słów
(k + m + t) bitowych
2
t
2n + 1
(n - liczba warunków)
Pole sterujące
mikrorozkazu S
zawiera sygnały
nie zakodowane
zakodowane
LM
ROM
T
S
A
LM:=A
LM:=LM+1
clk
1
p
1
p
2
p
n-1
Piotr Kawalec
Wykład XV - 5
Technika cyfrowa
Modyfikacja układu podstawowego
R - bit określający
rodzaj słowa
R= 0 słowo sterujące
R= 1 słowo warunkowe
LM
ROM
T
S
A
LM:=A
LM:=LM+1
clk
1
p
1
p
2
p
n-1
B
R
S
b
Piotr Kawalec
Wykład XV - 6
Technika cyfrowa
Porównanie mikroprogramowanych i
specjalizowanych układów
sterujących
Ze względu na szybkość działania:
w układach specjalizowanych szybkość
działania określają czasy propagacji
sygnałów w elementach;
w układach mikroprogramowych
szybkość działania określają operacje z
pamięcią.
Piotr Kawalec
Wykład XV - 7
Technika cyfrowa
Porównanie mikroprogramowanych i
specjalizowanych układów
sterujących
Ze względu na elastyczność (łatwość
modyfikacji) układu:
w układach specjalizowanych każda
zmiana realizowanego algorytmu wiąże
się z fizyczną przebudową układu (jeśli
układ budowany jest ze standardowych
elementów scalonych);
w układach mikroprogramowych zmiana
realizowanego algorytmu powoduje
zmianę zawartości pamięci stałej, przy
zachowaniu struktury układu.
Piotr Kawalec
Wykład XV - 8
Technika cyfrowa
Porównanie mikroprogramowanych i
specjalizowanych układów
sterujących
Ze względu na koszt (złożoność) układu:
układy realizujące proste algorytmy będą
mniej złożone jako układy
specjalizowane;
ze wzrostem złożoności realizowanych
algorytmów coraz tańsze stają się układy
mikroprogramowane.
Document Outline
Wyszukiwarka
Podobne podstrony:
Wykład XIV Specjalizowane układy sterujące
15Prawo Cywilne Wykład XV 4 marca
10 wykład XV
Wykład XV.2
14 WYKŁAD XV mutacjeid 15285 ppt
Bezpieczne elektryczne układy sterujące
Wyklad XV - zadania, Wykład III
Układy sterujące
WYKLAD XV 09, Metody nauczania i wychowania osób z lekką niepełnosprawnością intelektualną
14 WYKŁAD XV mutacje
Zawieszenie i układy sterujące w protezach, Ortopedia
Wykład XV, Studia Biologia, Mikrobiologia, wykłady z ogólnej
Wykład XV
Wykład XV " 02 01 Elementy topograficzne czaszki
Układy sterujące siłowników, studia
Laboratorium Techniki Mikroprocesorowej Układy transmisji równoległej sterowanie światłami
Podstawy Informatyki Wykład XV Object Pascal Grafika
Wyklad XV prezentacja
Laboratorium Techniki Mikroprocesorowej, Układy transmisji równoległej sterowanie światłami na skrzy
więcej podobnych podstron