Dr inż. JANUSZ LICHOTA
PODSTAWY AUTOMATYKI
regulatory optymalne
Wydział Mechaniczno-
Energetyczny

PLAN WYSTĄPIENIA
• Optymalizacja statyczna
sterowania
• Optymalizacja dynamiczna
sterowania
REGULACJA OPTYMALNA
Optymalizacja oznacza wybór
Wybór
• najlepszej strategii
• najlepszych parametrów
• najlepszego sygnału
sterującego
• najlepszej estymaty
Trajektoria samolotu i
wpływ zakłóceń (chmury)
REGULACJA OPTYMALNA
Optymalizacja oznacza wybór
• Optymalne rozwiązanie jest
ograniczone przez fizyczne
własności obiektu
• Optymalne wskaźniki jakości
regulacji są ograniczone przez
sygnały sterujące
• Celem jest minimalizacja funkcji
kosztu, która
jest
kompromisem pomiędzy jakością
regulacji i sygnałem sterującym
Duże u, dobry x (najmniejszy)
Średnie u, średni x
u=0, najgorszy x (największy)
REGULACJA OPTYMALNA
Optymalizacja statyczna i
dynamiczna
• Statyczna: optymalny stan i sygnał
sterujący są stałe niezależne od czasu
J
*
=J(x
*
, u
*
)
- minimalizacja lub
maksymalizacja funkcji
- optymalizacja parametrów
• Dynamiczna: optymalny stan i sygnał
sterujący są ciągle zależne od czasu
J
*
=J(x
*
(t), u
*
(t))
- optymalna trajektoria
- optymalna strategia sprzężenia
zwrotnego
• Funkcja kosztów J
*
jest w obu
przypadkach skalarem (liczbą
rzeczywistą)
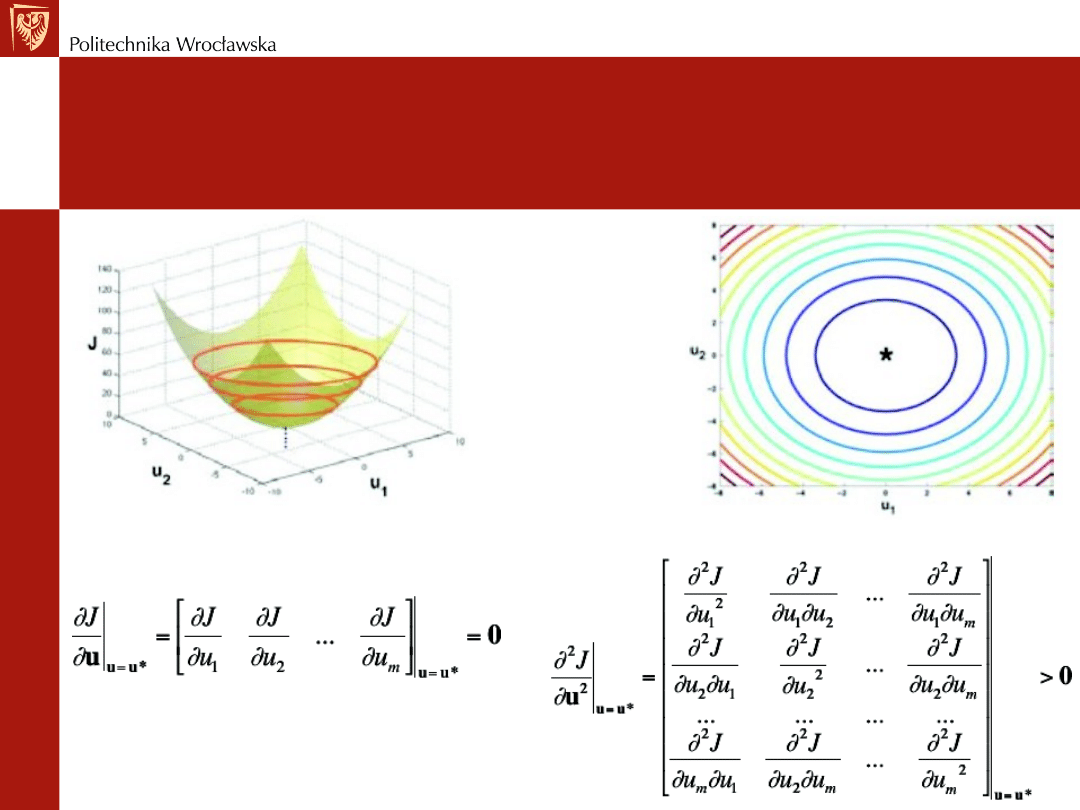
REGULACJA OPTYMALNA
Warunki konieczne i dostateczne istnienia
minimum
w optymalizacji statycznej
1) Gradient wskaźnika jakości (wektor 1 x m)=0
2) Hesjan jest dodatni
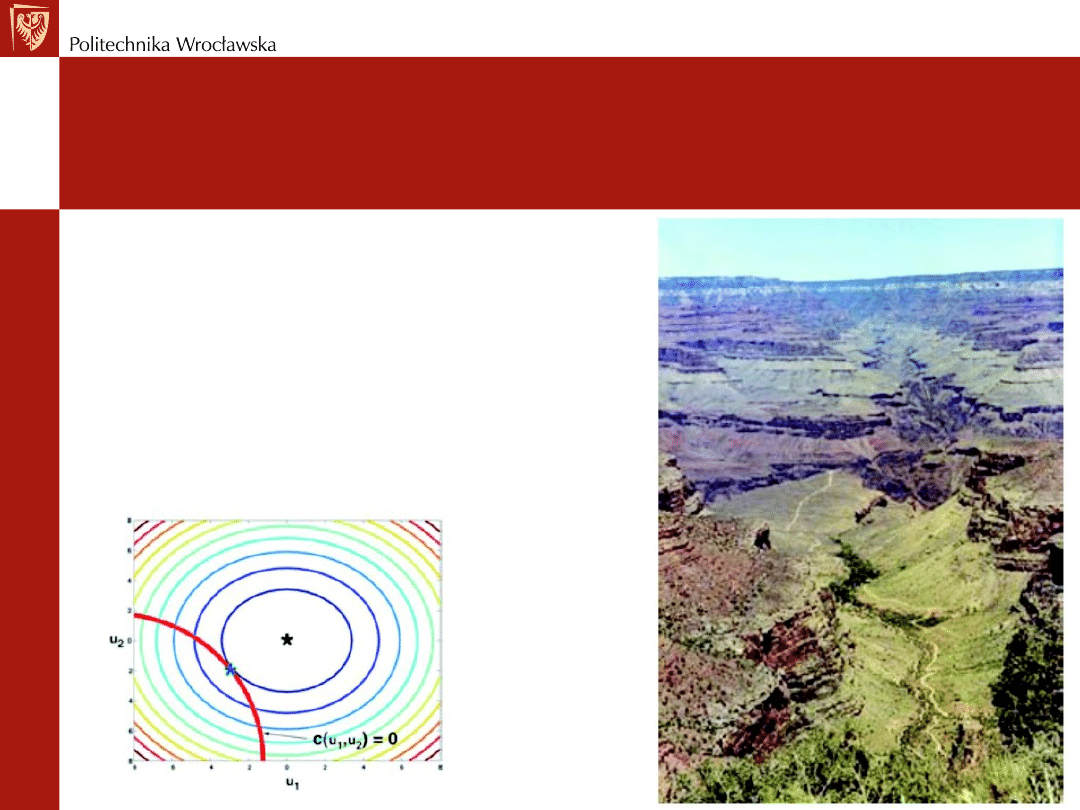
REGULACJA OPTYMALNA
Ograniczenia równościowe
• Zminimalizuj J(u’) wzdłuż krzywej c(u’)=0
-dim (c) = [ n x 1]
-dim(u’) = [(m + n) x1]
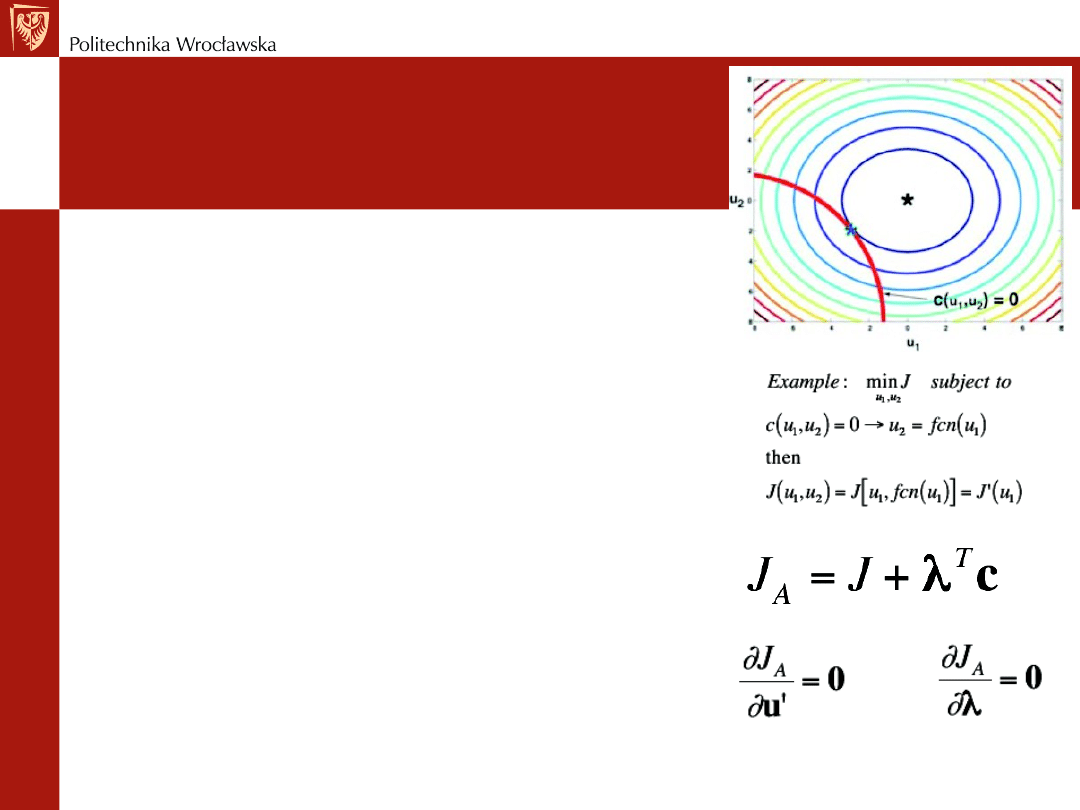
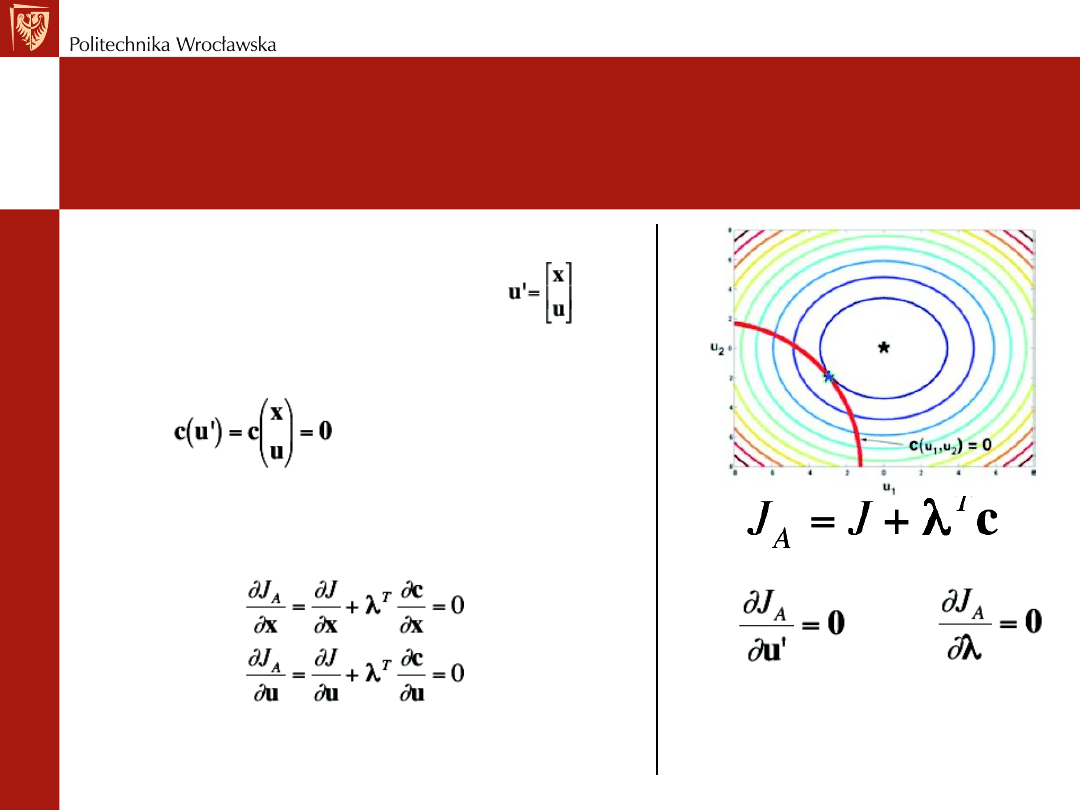
REGULACJA OPTYMALNA
Dwa podejścia do rozwiązania
1) Wykorzystaj ograniczenie do redukcji wymiaru sterowania
2) Wykorzystaj J(u’) do zbadania przebiegu krzywej c(u’)=0
- wprowadź mnożnik Lagrange’a, , jako nieznaną stałą
- ma ten sam wymiar co ograniczenie c, dim()=[n x 1]
- w minimum
- J
A
jest stacjonarne tj. gradient u’ oraz jest równy 0
- spełnione jest ograniczenie równościowe c=0
Należy rozwiązać 2n+m, aby znaleźć optymalne parametry x,u,
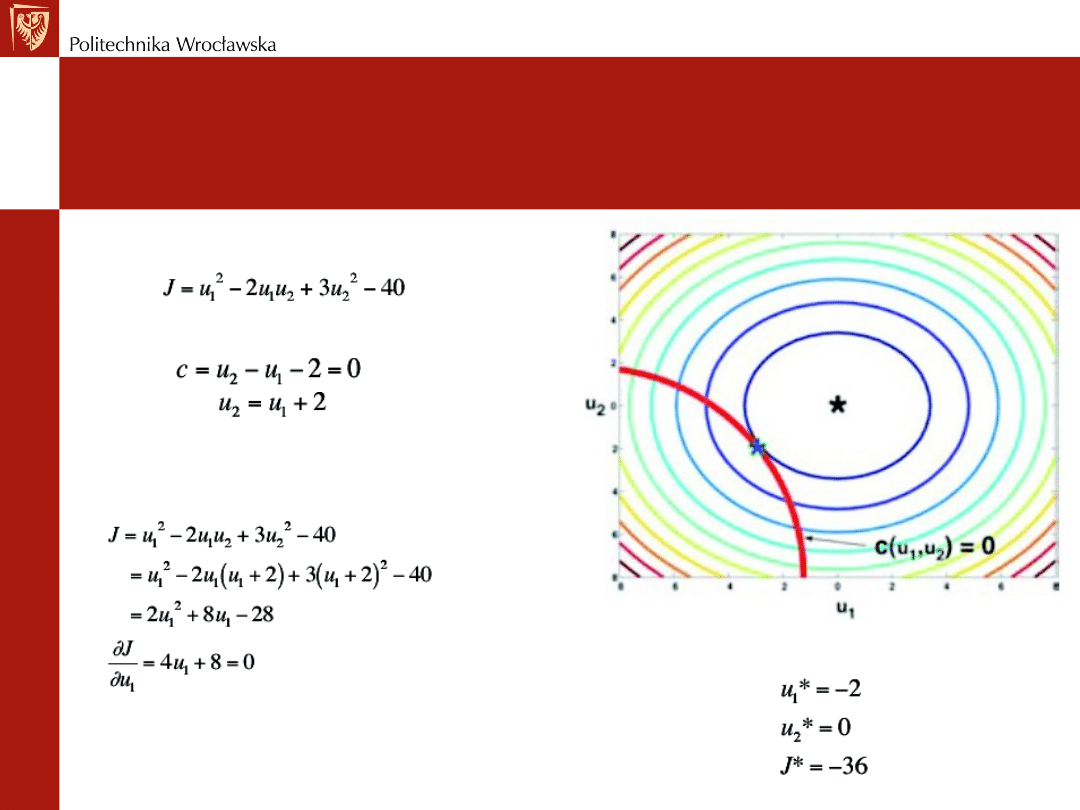
REGULACJA OPTYMALNA
Przykład pierwszego rozwiązania
Funkcja kosztów
Ograniczenie
Funkcja kosztów
Rozwiązanie optymalne
REGULACJA OPTYMALNA
Przykład drugiego rozwiązania
Podziel u’ na stan x oraz sterowanie u
-dim(x)=[n x 1]
-dim(u)=[m x 1]
-Wtedy
-Gradient odniesiony do u’ tworzy dwa równania
-W minimum
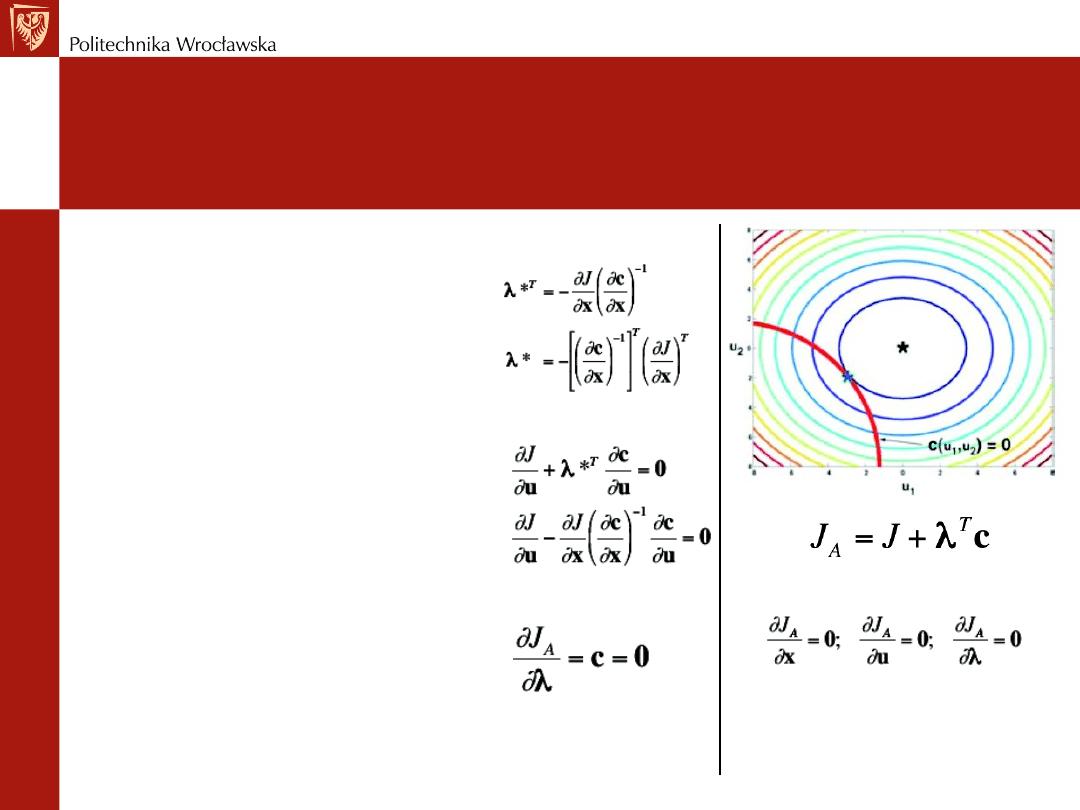
REGULACJA OPTYMALNA
Przykład drugiego rozwiązania
Rozwiąż pierwsze równanie znajdując
mnożniki Lagrange’a (n równań)
Drugie równanie pozwala na obliczenie
m sygnałów sterujących u
Pozostałe n równań jest określone przez
ograniczenie równościowe
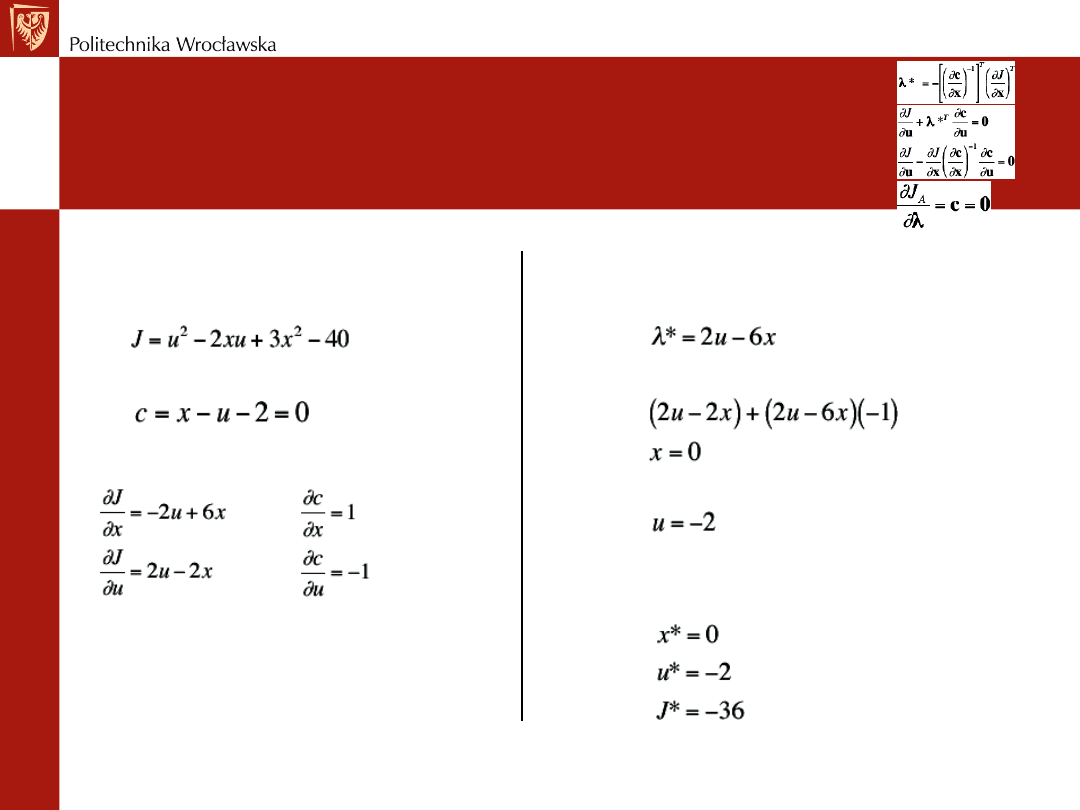
REGULACJA OPTYMALNA
Przykład drugiego rozwiązania
Funkcja kosztu
Ograniczenie
Pochodne cząstkowe
Z pierwszego równania
Z drugiego równania
Z ograniczenia
Rozwiązanie optymalne

REGULACJA OPTYMALNA
Optymalizacja dynamiczna
Minimalizacja funkcji kosztów końcowych i całki z kosztów bieżących
L - lagranżian
w funkcji sterowania u(t) w czasie (t
o
, t
f
) z ograniczeniem dynamicznym
Warunek początkowy x(t
o
) jest zadany.
dim(x)=[n x 1]
dim(f)=[n x 1]
dim(u)=[m x 1]

REGULACJA OPTYMALNA
Optymalizacja dynamiczna
Wykorzystaj funkcję kosztów J(u’) do zbadania przebiegu ograniczenia
dynamicznego
- wprowadź mnożnik Lagrange’a, , jako nieznany zależny od czasu wektor
- ma ten sam wymiar co ograniczenie c, dim()=[n x 1]
Dołącz ograniczeni dynamiczne do całki z zastosowaniem mnożnika Lagrange’a
- ograniczenie =0 wtedy, gdy jest spełnione równanie
Zdefiniuj Hamiltonian
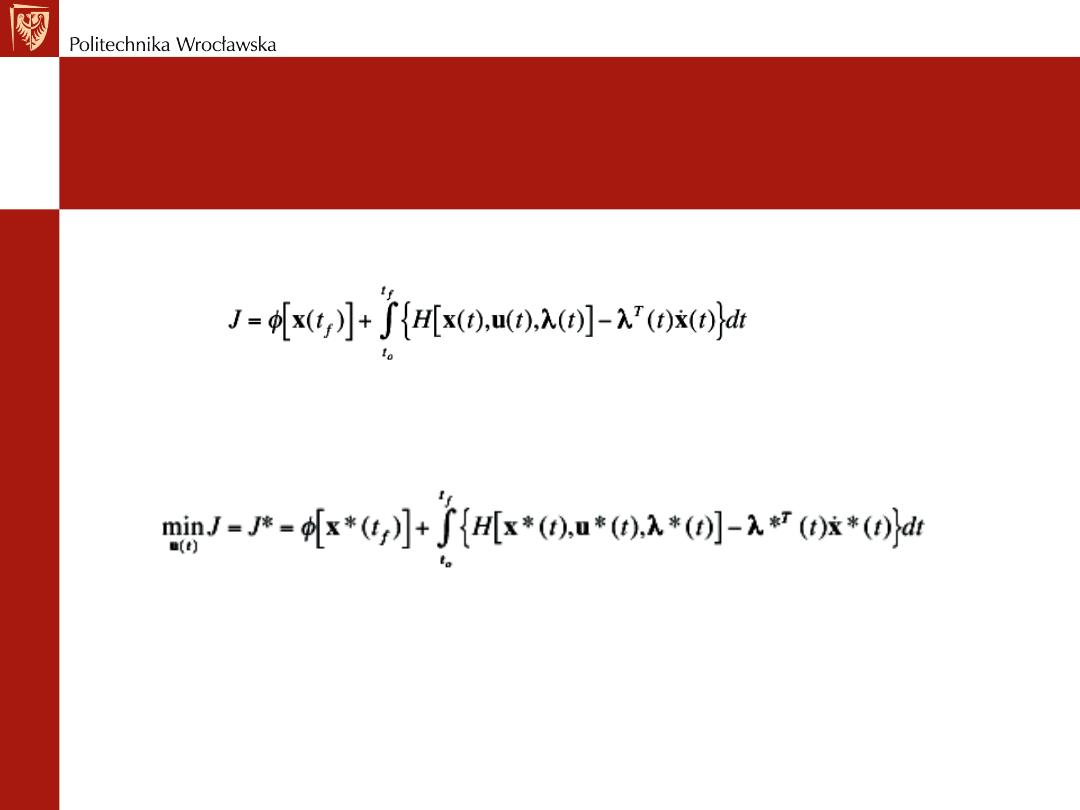
REGULACJA OPTYMALNA
Wykorzystaj Hamiltonian
Wstaw hamiltonian do równania kosztów
Optymalny koszt jest wynikiem optymalnego sterowania, stanu i mnożnika Lagrange’a
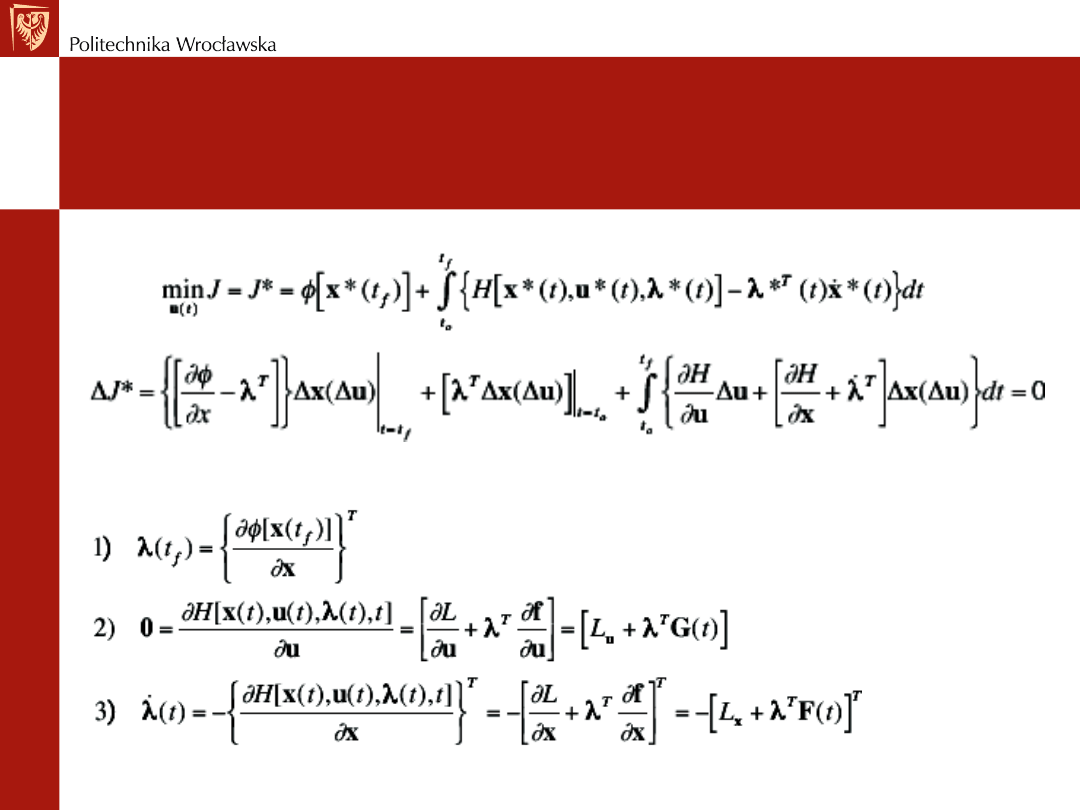
REGULACJA OPTYMALNA
Sterowanie optymalne
Koszt wzdłuż optymalnej trajektorii J
*
powinien być niewrażliwy na małe zmiany sterowania
Przyjmując J
*
=0 otrzymujemy trzy równania Eulera-Lagrange’a (warunki konieczne optymalności)
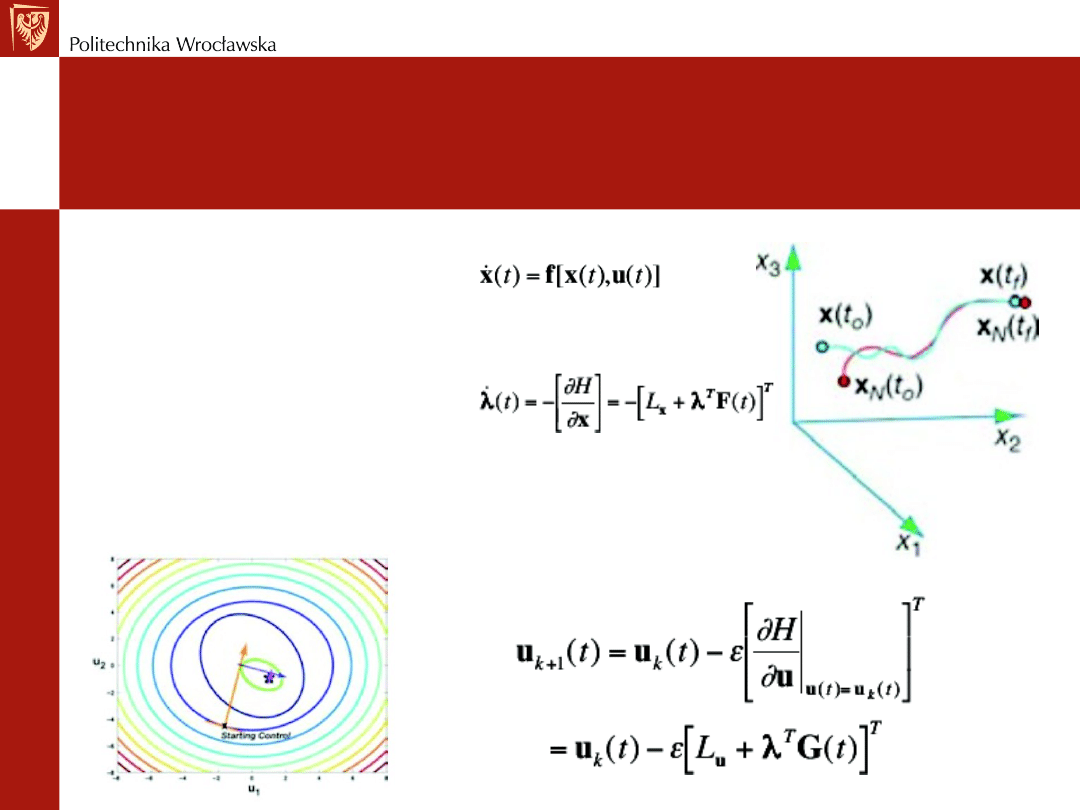
REGULACJA OPTYMALNA
Optymalizacja numeryczna za pomocą
gradientowego algorytmu największego spadku
Procedura
-rozwiązanie w przód, x(t)
-rozwiązanie wstecz, (t)
-algorytm największego spadku
w poszukiwaniu u(t)
x(t
o
) zadany
(t
f
)
zadany
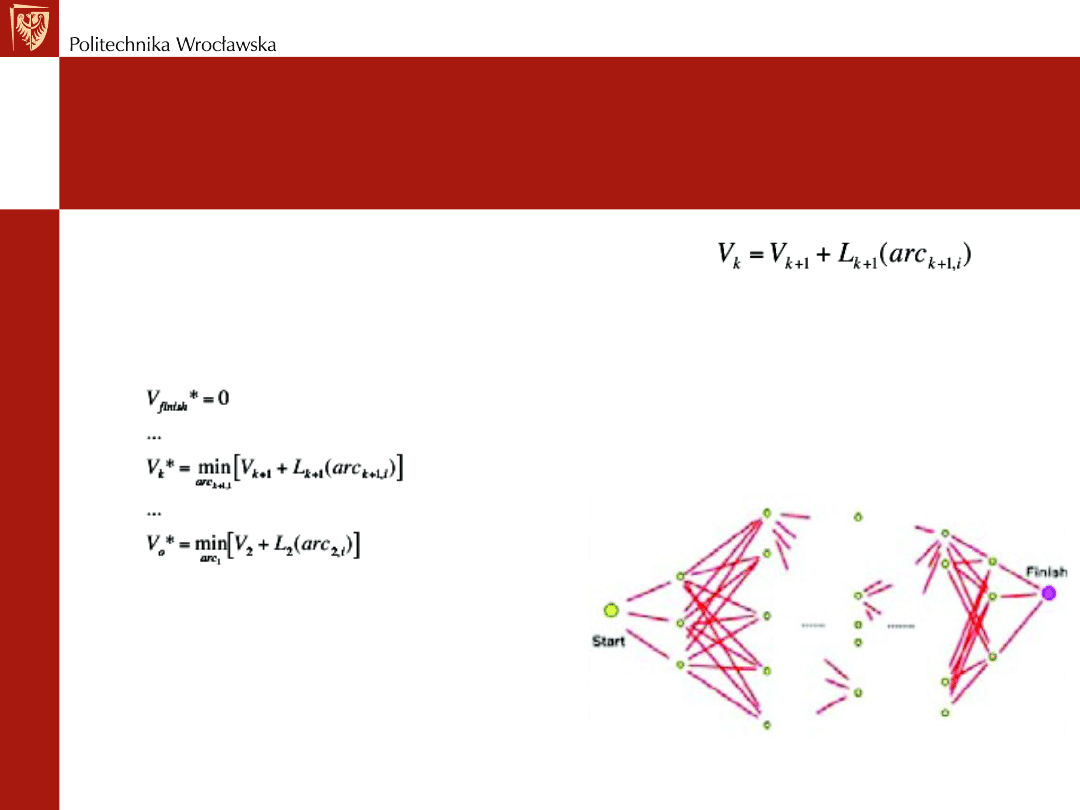
REGULACJA OPTYMALNA
Programowanie dynamiczne
Cel: zminimalizuj wartość kosztu V
o
od chwili
bieżącej do końcowej poprzez wybór łuków
Każdy łuk reprezentuje koszt L
k+1
Poszukiwanie w dwóch kierunkach
-proces iteracyjny
Łańcuch w przód propaguje koszty od początku
Łańcuch wstecz propaguje koszty od końca
(koszt końcowy ścieżki)
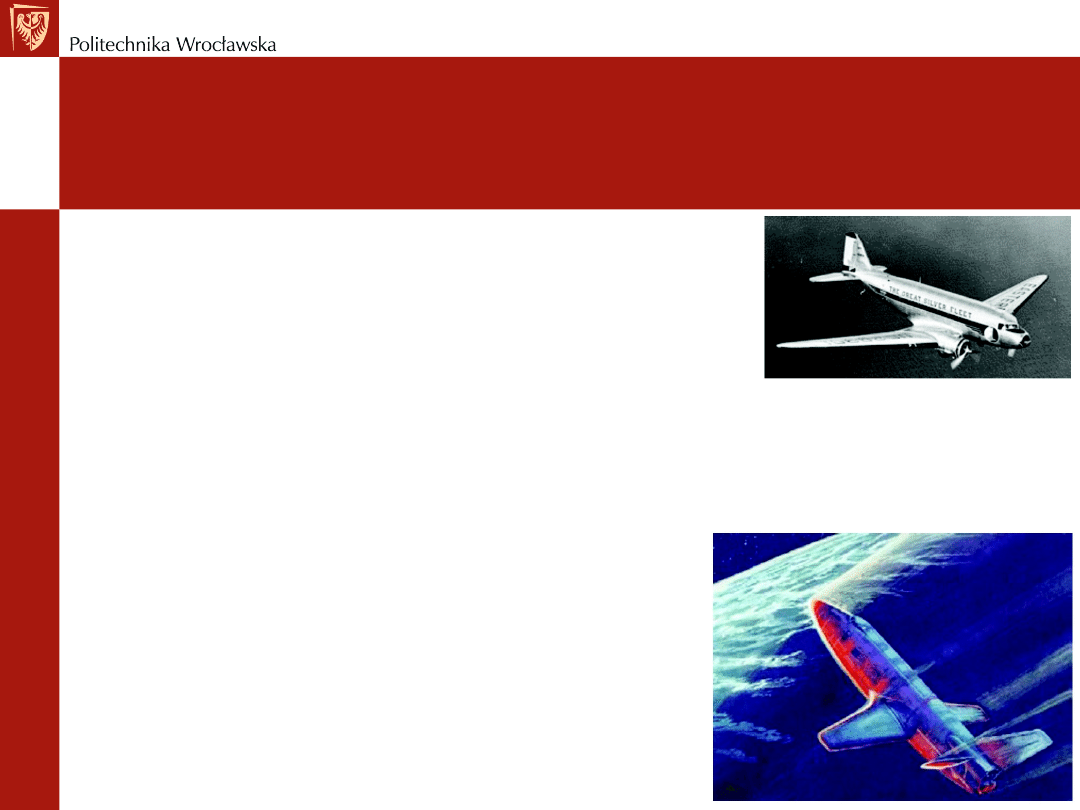
REGULACJA OPTYMALNA
Przykład – optymalny kąt natarcia promu
kosmicznego
Kąt natarcia = kąt pomiędzy osią samolotu i wektorem prędkości
Początkowe koncepcje promu były oparte o DC-3 =60°.
Problemem jest przejście od dużego kąta natarcia do małego
podczas lądowania.
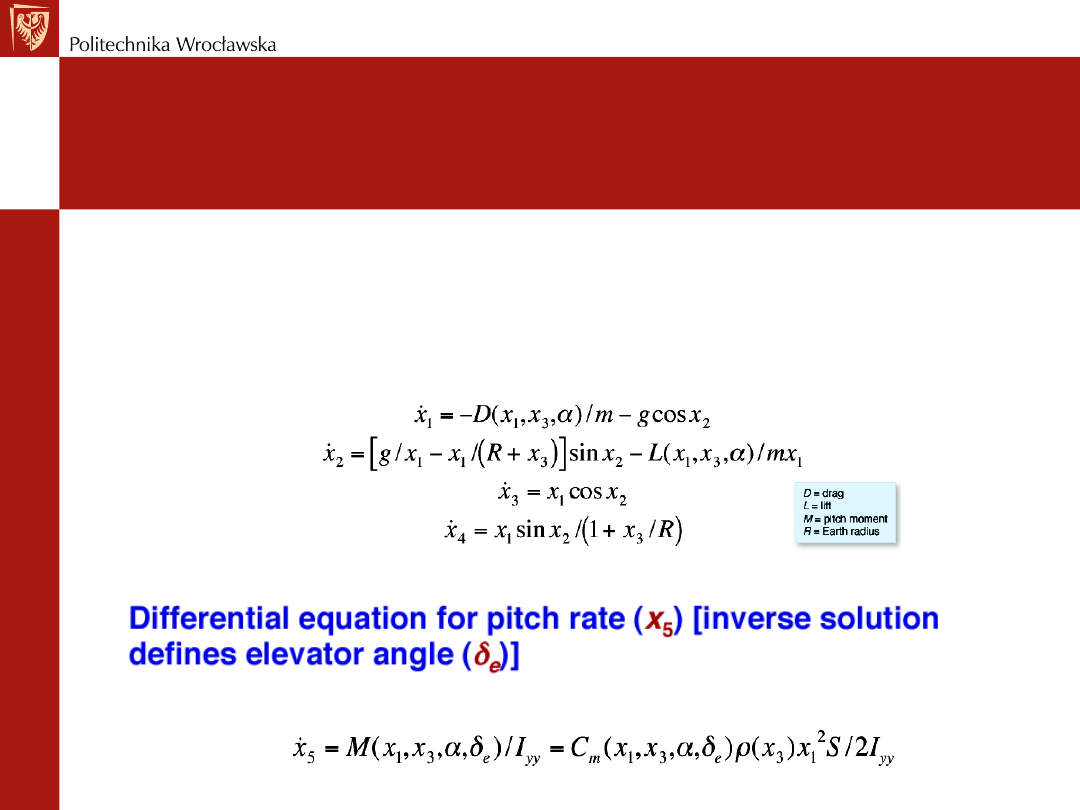
REGULACJA OPTYMALNA
Przykład – równania ruchu promu
Zmienne używane w optymalizacji, x
1
=v prędkość, kąt ścieżki lotu x
2
=g, wysokość x
3
=h i zasięg
lotu x
4
.
Optymalizowany jest kąt natarcia .
Kąt natarcia
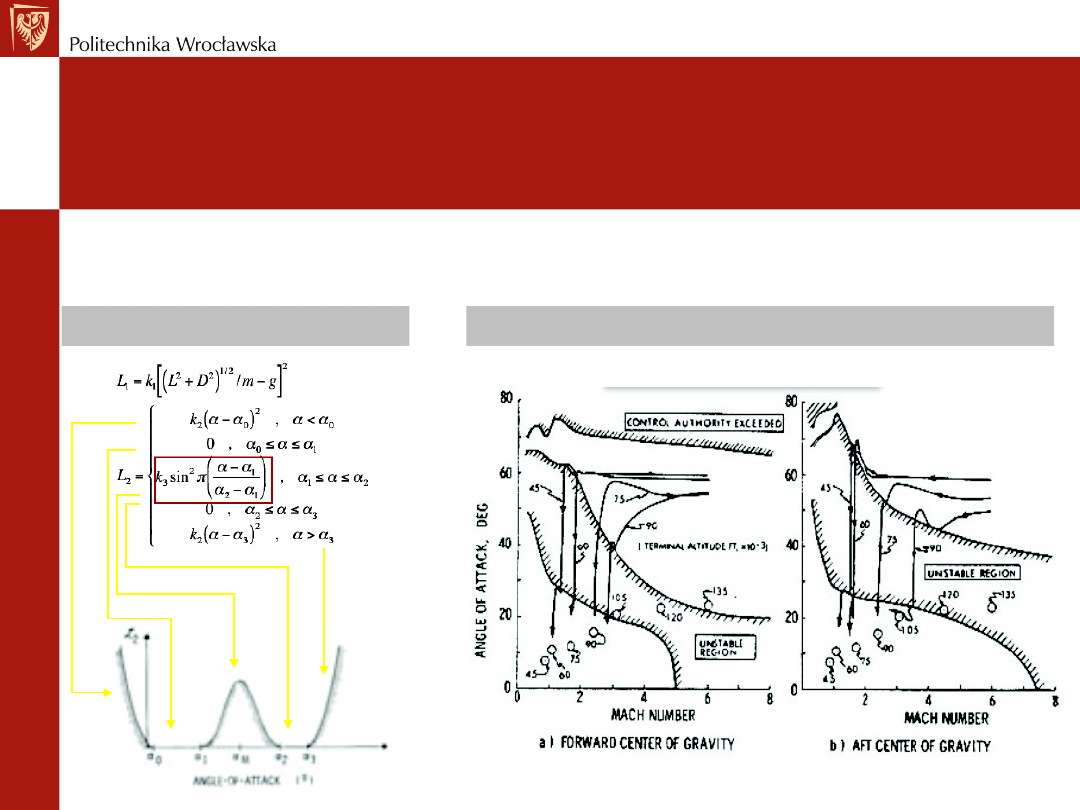
REGULACJA OPTYMALNA
Przykład – optymalna ścieżka lotu
Funkcja kosztów wprowadza funkcję kary w regionie niestabilnym
Są również spełnione dodatkowe warunki dla zmiennego czasu końcowego t
f
Składniki funkcji kosztu
Kąt natarcia w zależności od liczby Macha
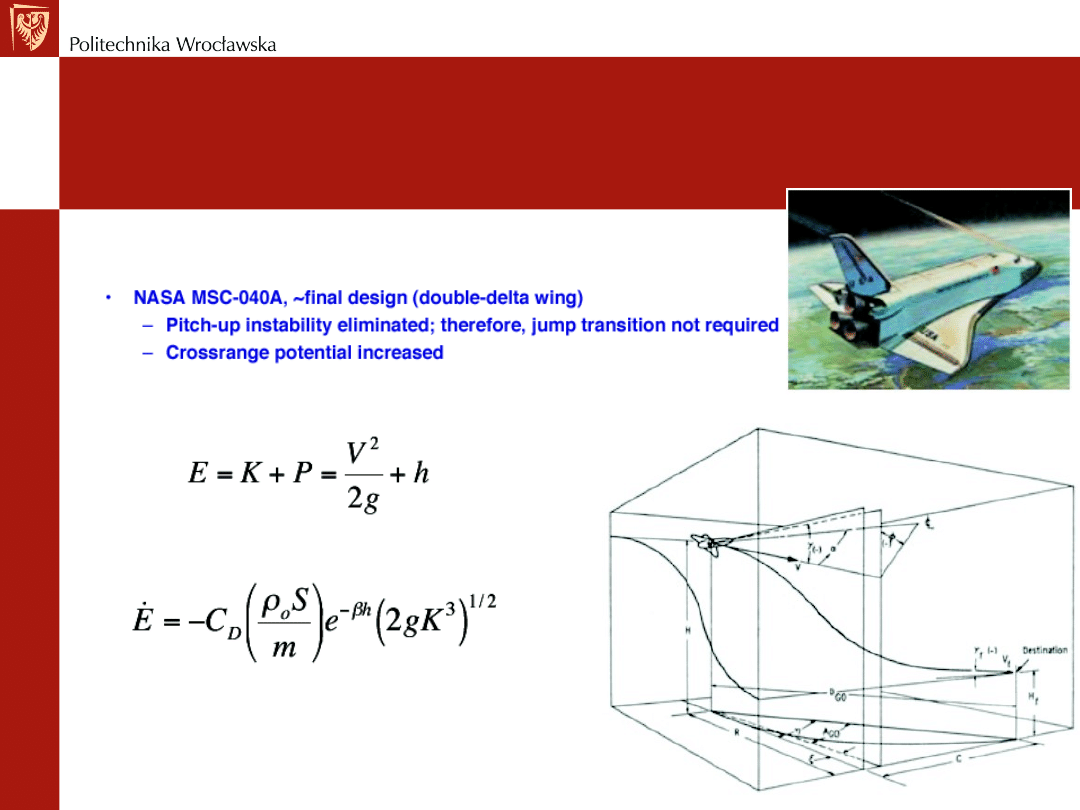
REGULACJA OPTYMALNA
Przykład – rozpraszanie energii w czasie
powrotu
Rozwiązanie końcowe – skrzydło w kształcie 2
- wyeliminowano niestabilność kąta wniesienia promu
- wzrósł zasięg
Energia całkowita wynosi
Energia maleje monotonicznie na trajektorii powrotnej
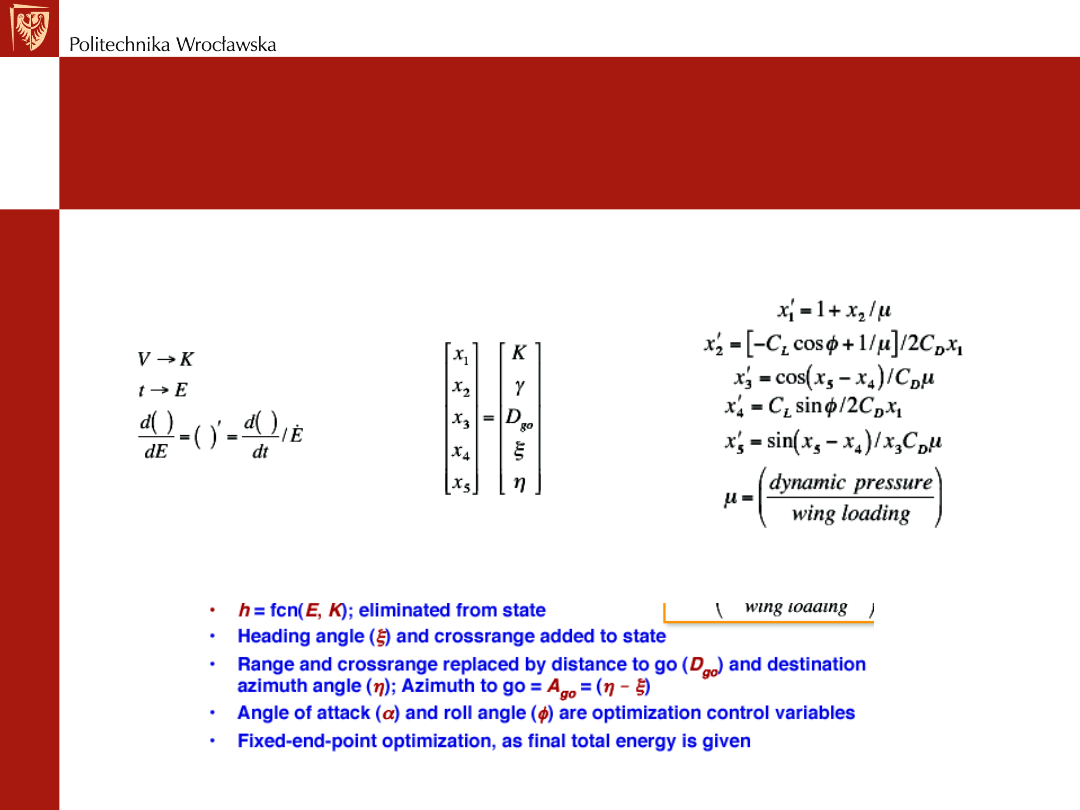
REGULACJA OPTYMALNA
Przykład – trójwymiarowe równania ruchu
Zmiana zmiennych podlegających optymalizacji
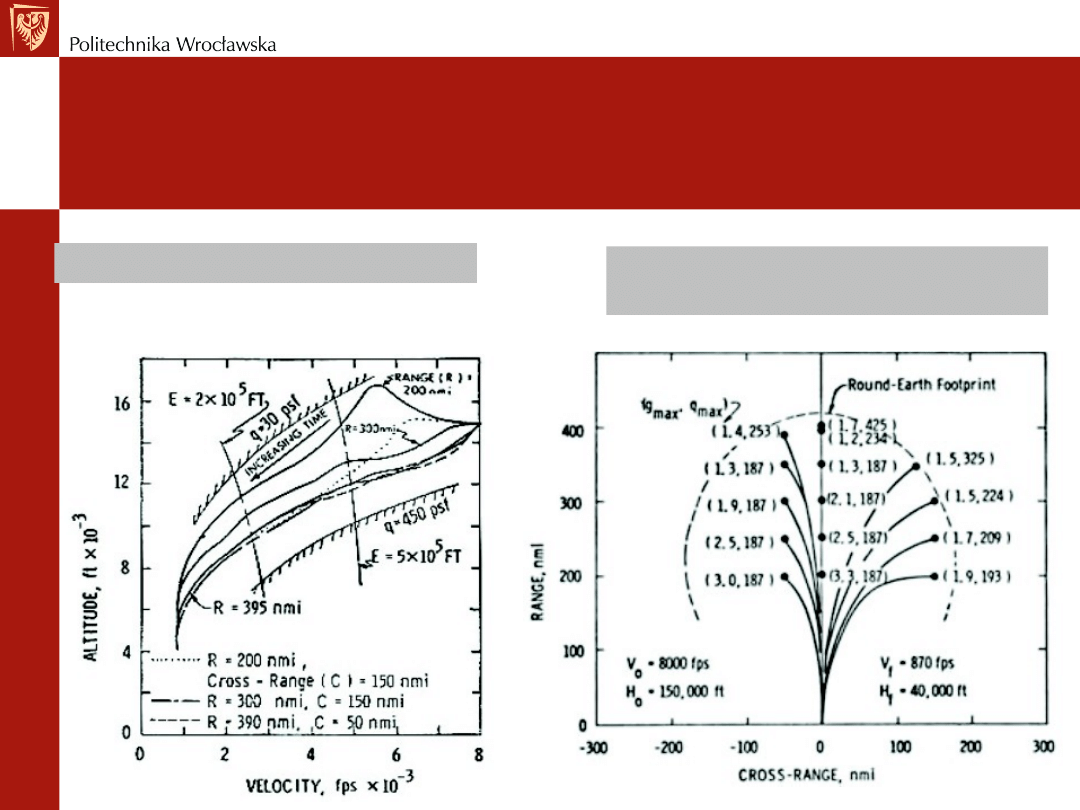
Wysokość w funkcji prędkości
Zasięg w funkcji poprzecznego
przesunięcia promu
REGULACJA OPTYMALNA
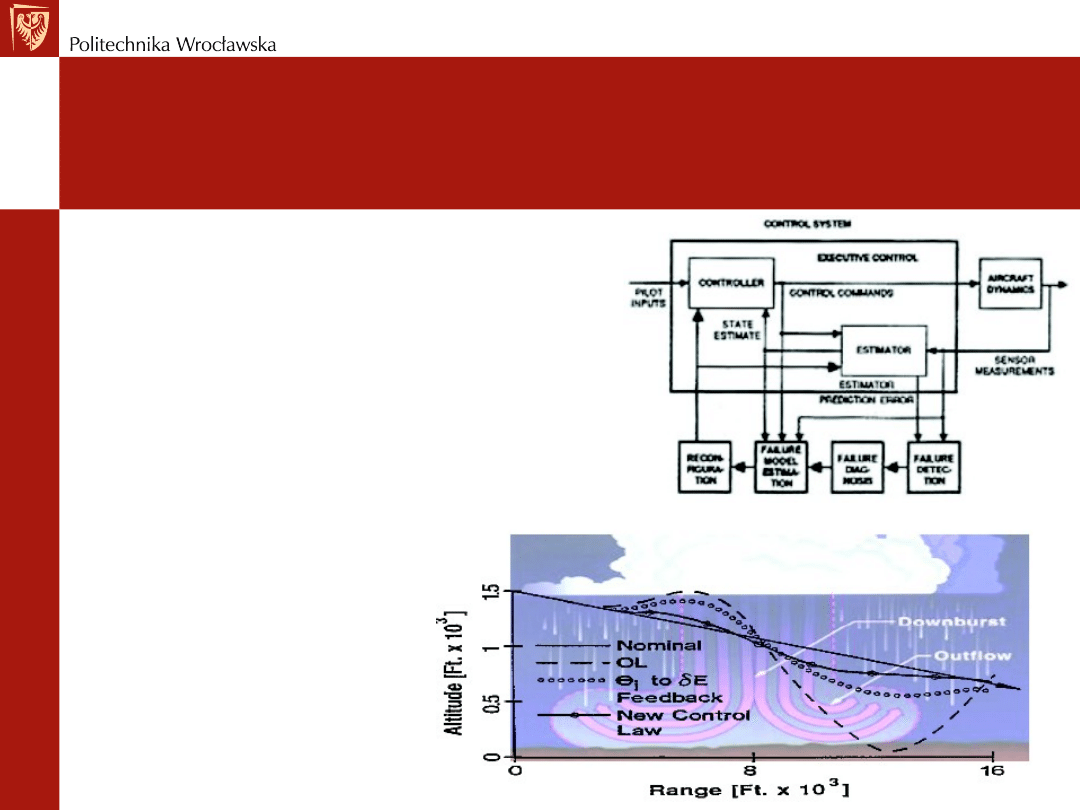
Przykład – optymalne prowadzenie promu
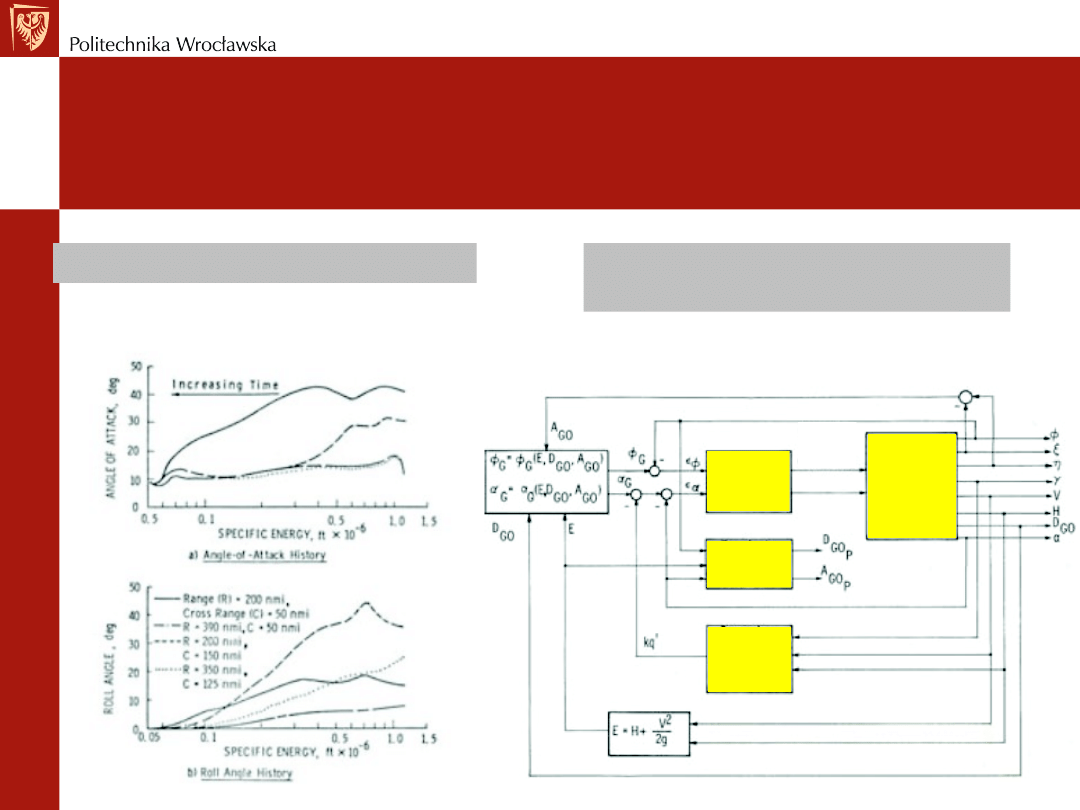
Kąt natarcia w funkcji energii
Układ sterowania w oparciu o
prawo zachowania energii
Logika
kontroli
lotu
Dynamika
samolotu
Predykcja
punktu
końcowego
Tłumienie
prędkości
zmian ciśnienia
dynamicznego
Komendy
powierzchni
kontrolnych
REGULACJA OPTYMALNA
Przykład – optymalne trajektorie ruchu
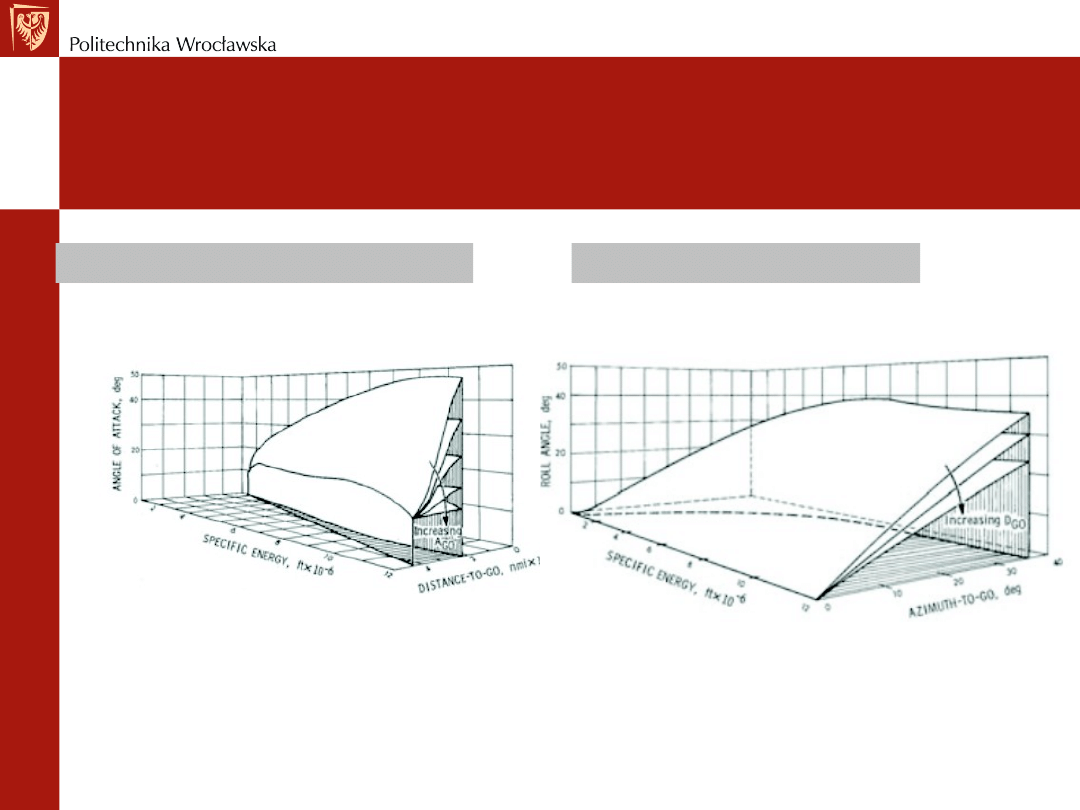
REGULACJA OPTYMALNA
Przykład – funkcje prowadzące prom do
lądowania
Funkcja zmiany kąta natarcia
Funkcja zmiany kąta ???
Sposoby rozwiązania układu sterowania
- programowanie dynamiczne
- nieliniowe sprzężenie zwrotne
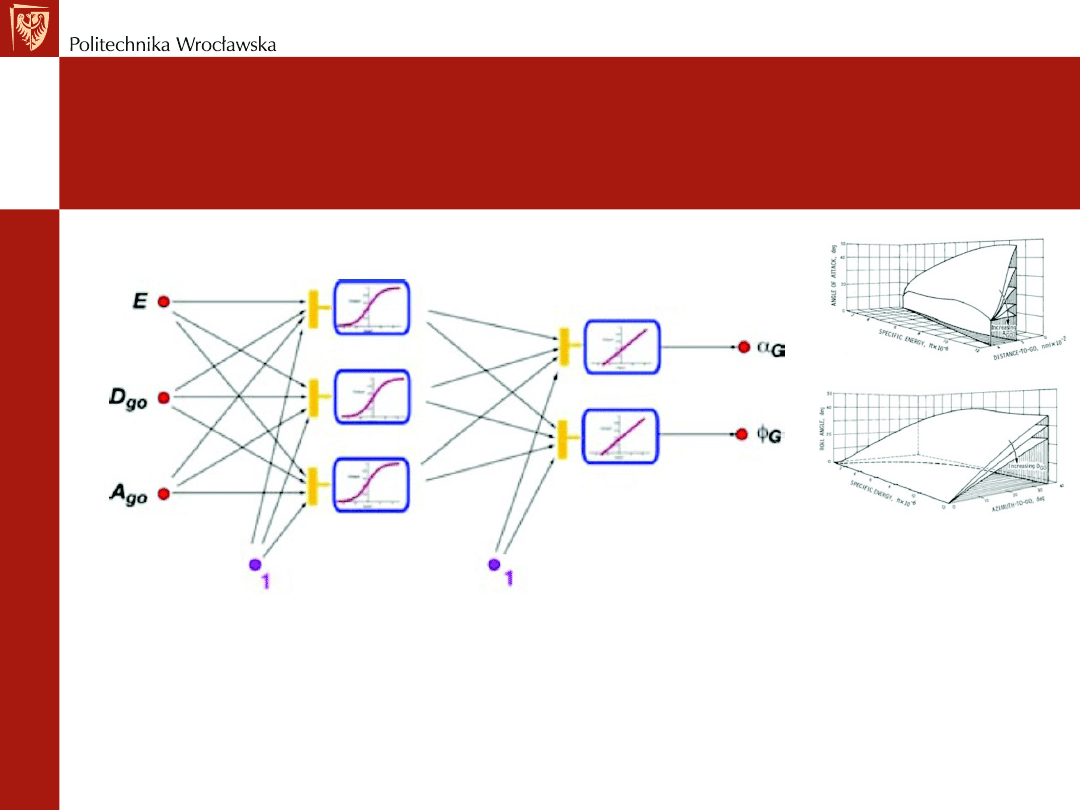
REGULACJA OPTYMALNA
Przykład – sieć neuronowa modelująca funkcje
prowadzące

REGULACJA OPTYMALNA
Przykład – optymalna terapia choroby
Do uzupełnienia
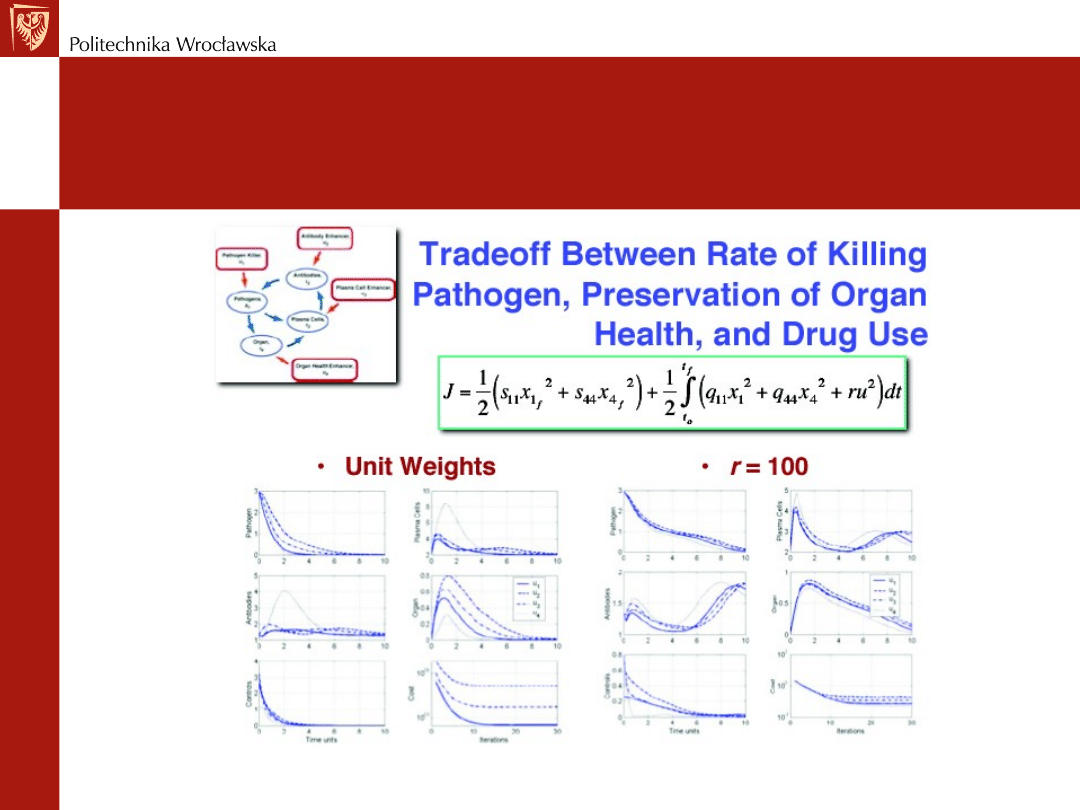
REGULACJA OPTYMALNA
Przykład – optymalna terapia choroby
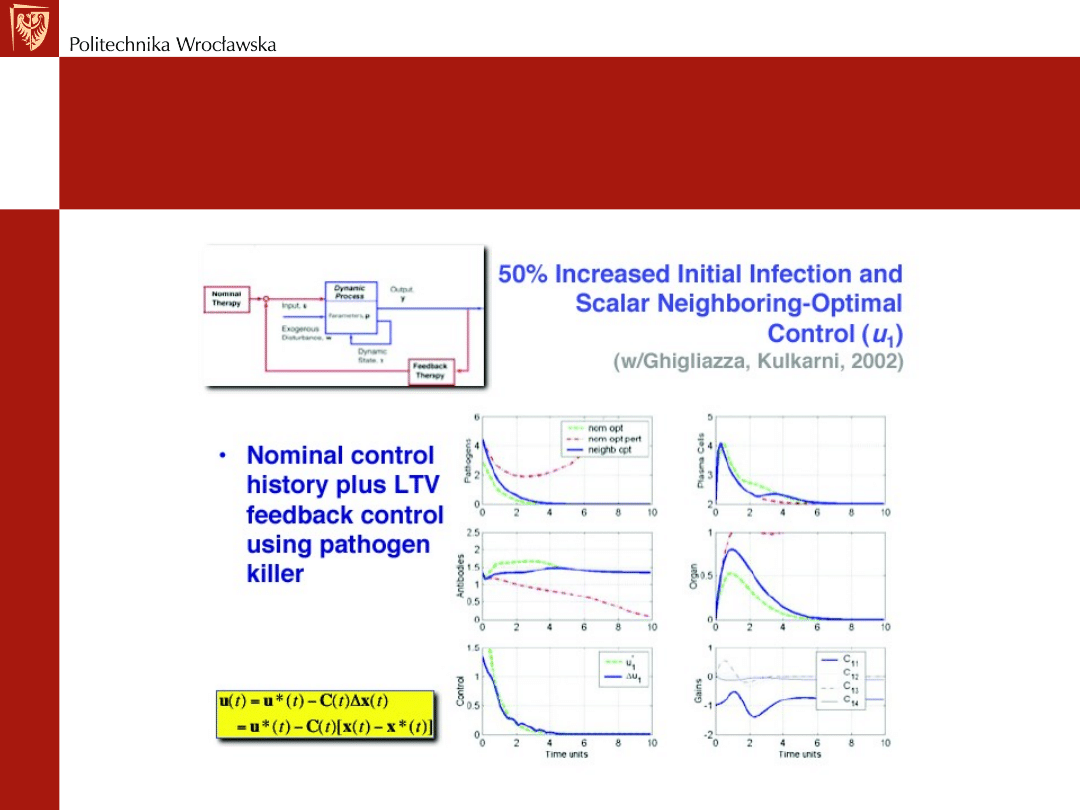
REGULACJA OPTYMALNA
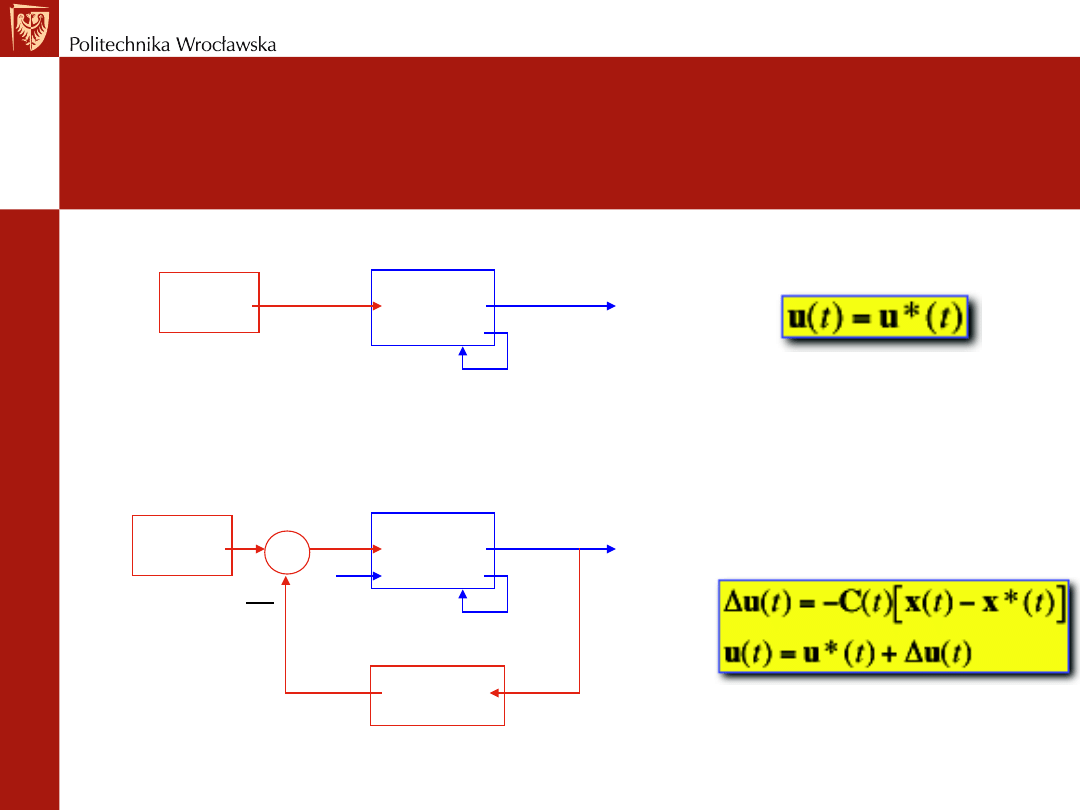
Przykład – optymalna terapia choroby
Sterowanie optymalne może odbywać się w pętli otwartej
Sterowanie sub-optymalne odbywa się w pętli zamkniętej
Optymalny
sygnał
sterujący
Obiekt
dynamiczny
Wektor
Parametrów p
Stan
dynamiczny x
Sygnał wyjściowy y
Sygnał wejściowy u
Optymalny
sygnał
sterujący
Obiekt
dynamiczny
Wektor
Parametrów p
Stan
dynamiczny x
Sygnał wyjściowy y
Sygnał
wejściowy
u
Prawo regulacji
w sprzężeniu
zwrotnym
Zakłócenia w
REGULACJA OPTYMALNA
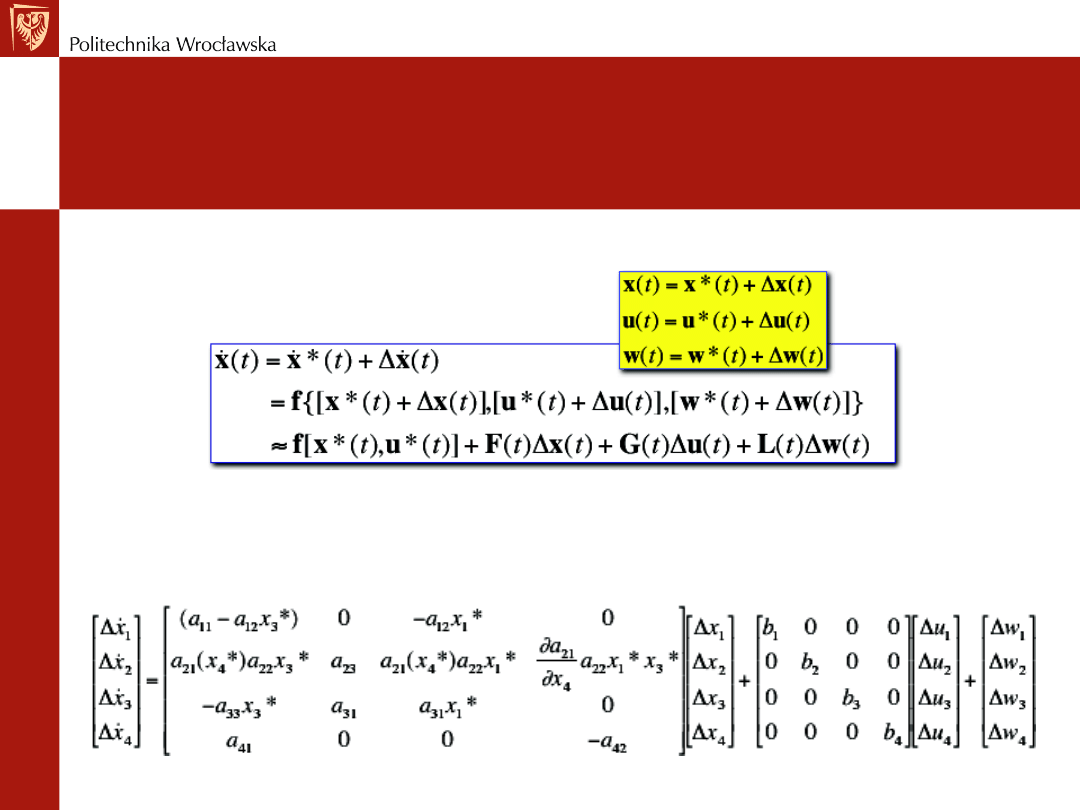
Przykład – algorytm sub-optymalny terapii
choroby
Rozwinięcie pierwszego rzędu równania dynamicznego,
z uwzględnieniem zakłóceń w
Zlinearyzowane w punkcie pracy, zmienne w czasie, równanie dynamiczne
REGULACJA OPTYMALNA
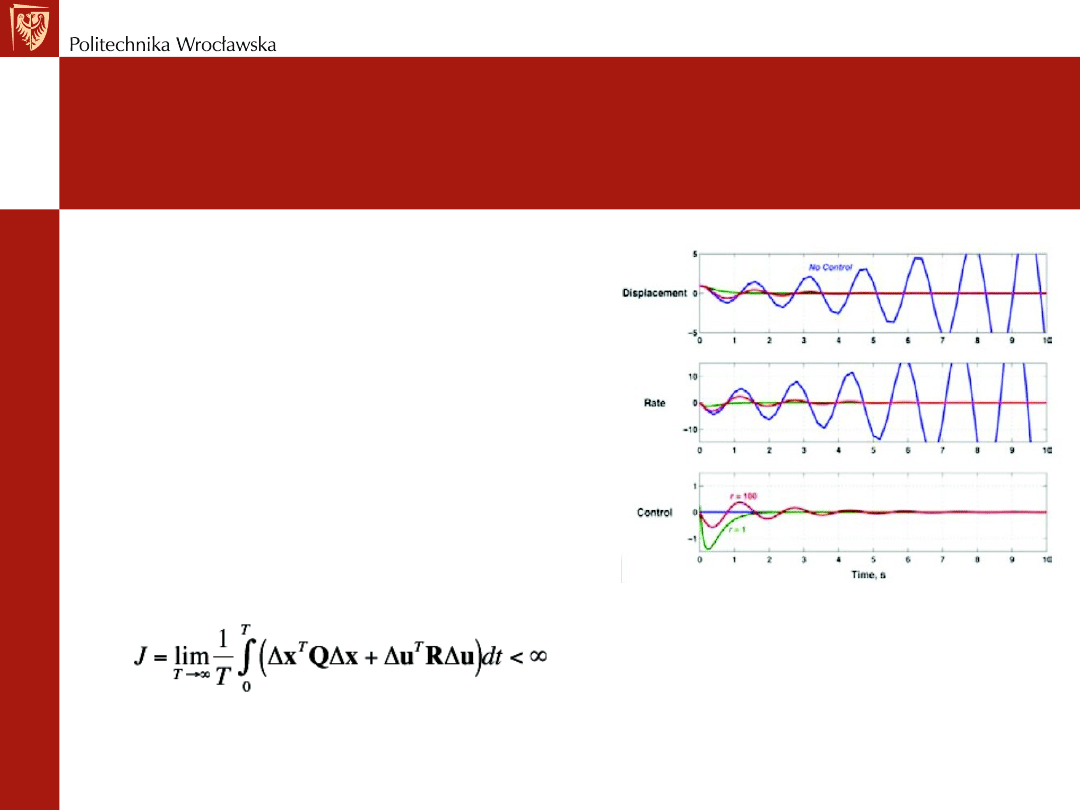
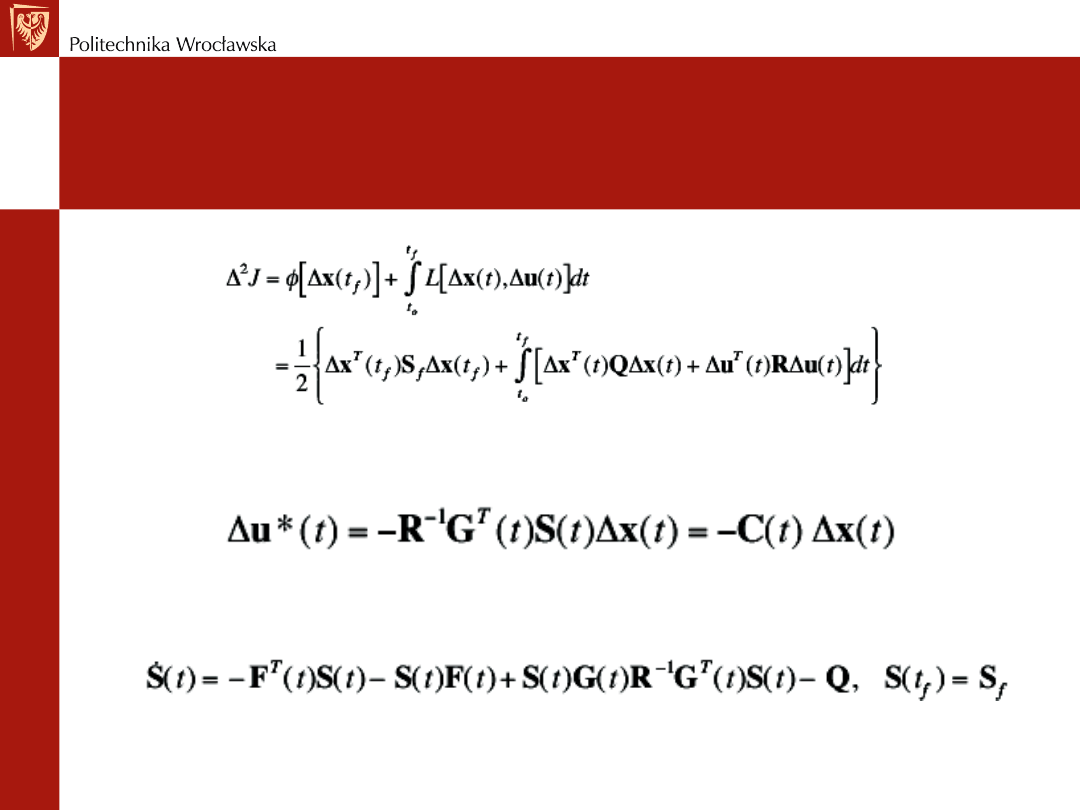
Przykład – deterministyczny regulator liniowo-
optymalny
Funkcja kosztów
Równania Eulera-Lagrange’a prowadzą do liniowego, zmiennego w czasie, optymalnego prawa regulacji
Równanie Riccatiego dla regulatora

REGULACJA OPTYMALNA
Optymalne i sub-optymalne sterowanie

Dziękuję za uwagę i
zainteresowanie
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
- Slide 31
- Slide 32
- Slide 33
- Slide 34
- Slide 35
Wyszukiwarka
Podobne podstrony:
Podstawy automatyki (w 3) regula id 366722
Podstawy automatyki i regulacji cd
Ćw.2.Cyfrowy regulator PID, Elektrotechnika - notatki, sprawozdania, podstawy automatyki i regulacji
podstawy automatyki regulacja sprawozdanie
Rozdz. 16., PODSTAWY AUTOMATKI
Chorowski,podstawy automatyki, regulatory
Podstawy Automatyki Lab 2014 CW3 Badania regulatora dwupołożeniowego
regulamin-lab1a, Semestr IV, Podstawy Automatyki
syposz,podstawy automatyki, DOBÓR NASTAW REGULATORÓW
syposz,podstawy automatyki, CHARAKTERYSTYKI ZAWORÓW REGULACYJNYCH
Podstawy Automatyki Lab - 2010 - CW6, Badanie regulatora
Chorowski,podstawy automatyki, Uchyb regulacji
Cwiczenie 2 - Regulatory dwustawne moje, Szkoła, Semestr 5, Podstawy Automatyki - laboratoria, Autom
Podstawy Automatyki Lab 10 CW6 ?danie regulatora PID
Podstawy Automatyki Lab 2010 CW6 Badanie regulatora â¦
Podstawy Automatyki Lab 2010 CW5 Regulator dwupołoże
Regulatory, PWR - Automatyka i Robotyka W10, semestr 4, Podstawy automatyki
więcej podobnych podstron