
Propedeutyka automatyki
Propedeutyka automatyki
W2
W2
1
Właściwości układów sterowania
Właściwości układów sterowania
Zagadnienia analizy i projektowania układów sterowania:
•zadania sterowania,
•właściwości obiektu lub procesu sterowanego,
•opis matematyczny obiektu lub procesu sterowanego,
•charakterystyki zakłóceń występujących w środowisku pracy układu
sterowania,
•wskaźniki jakości sterowania - funkcje i metody, umożliwiających ocenę
realizacji sterowania,
•właściwości sygnałów w układzie sterowania - w tym ograniczenia ich
wartości (np. ograniczenia strumienia energii, wielkości przepływu),
•założenia dotyczących rodzaju i struktury regulatora.
2
Właściwości układów sterowania
Właściwości układów sterowania
Zadania sterowania. Klasyfikacja.
Kryterium - postać i charakter sygnału wartości zadanej:
•Sterowanie stałowartościowe. Wartość zadana jest stała y
0
(t) = const.
Spotykane określenie – sterowanie ze stabilizacją sygnału sterowanego.
Przykłady: układy regulacji prędkości obrotowej turbiny, temperatury
pieca, prądu spawania.
•Sterowanie programowe. Wartość zadana zmienia się w czasie według
określonej funkcji y
0
(t)= f(t) – zgodnie ze znanym programem Funkcja
ta może zależeć np. od warunków początkowych lub informacji z
obiektu, ale układ sterowania jest w stanie przewidzieć jej dalszy
przebieg dla wszelkich możliwych sytuacji. Przykłady: sterowanie
silnikiem pralki automatycznej. Prędkości i kierunek obrotów w
kolejnych krokach programu zmieniają się, ale według reguł określonych
z góry programem.
•Sterowanie nadążne. Wartość zadana jest funkcją zmienną w czasie o
nieznanym przebiegu. Może przybierać w kolejnych chwilach wartości
przypadkowe.
Sterowanie
musi
zapewniać
nadążanie
sygnału
sterowanego za losowym sygnałem zadanym. Przykłady: śledzenie
obiektu latającego (samolotu, rakiety) przez radar, system kierowania
baterią przeciwlotniczą.
•Sterowanie ekstremalne. Wartość zadana nie występuje w sposób
jawny. Zadaniem układu sterowania jest utrzymywanie wartości sygnału
sterowanego na poziomie maksymalnym lub minimalnym. Wartość tego
ekstremum nie musi być stała; może zmieniać się wraz ze zmianą stanu
obiektu lub pod wpływem zakłóceń. Przykłady; minimalizację zużycia
energii przez piec ogrzewczy, zużycia paliwa podczas lotu samolotu.
3
Właściwości układów
Właściwości układów
sterowania
sterowania
Kryterium - odpowiedż układu sterowania na zakłócenia:
•zadania przestawiania - po skokowej zmianie wartości zadanej (lub
zakłóceniu) układ sterowania możliwie szybko doprowadza do zmiany
wartości sygnału sterowanego, aby ponownie doprowadzić uchyb do
wartości bliskiej zeru;
•zadania nadążania - przy zmianach wartości zadanej w czasie układ
sterowania stara się w każdej chwili minimalizować uchyb;
•zadania kompensacji zakłóceń - najważniejszym celem układu sterowania
jest wyeliminowanie lub możliwie znaczące ograniczenie wpływu zakłóceń
na proces sterowany.
4
Właściwości układów
Właściwości układów
sterowania
sterowania
Sterowane obiekty i procesy.
Podstawowy podziałów obiektów (układów sterowania, procesów) wg.
kryterium - sposób zmiany wartości sygnałów i przekazywania sygnałów w
czasie:
•obiekty o sterowaniu ciągłym - zmiany sygnałów i ich przekazywanie
(odczytywanie) mogą się odbywać w dowolnych chwilach,
•obiekty o sterowaniu dyskretnym (impulsowe) – zmiana wartości
sygnałów odbywa się w wyróżnionych chwilach. Do oceny stanu obiektu i
opisu jego właściwości wystarcza znajomość, a więc i przekazywanie
(odczyt) sygnałów w tych wyróżnionych chwilach.
Przenosząc ten podział na model obiektu, można powiedzieć, że:
•dla obiektu (układu, procesu) ciągłego zmienna niezależna (czas) jest
ciągła, tzn. może przyjmować dowolne wartości ze zbioru wartości
dopuszczalnych w okresie analizy obiektu;
•dla obiektu (układu, procesu) dyskretnego zmienna niezależna (czas) jest
zmienną dyskretną, tzn. zmienne opisujące właściwości obiektu mogą być
uzyskane w chwilach o wyróżnionych wartościach zmiennej niezależnej
(czasu) i należących do zbioru dopuszczalnego w okresie analizy obiektu.
5
Właściwości układów
Właściwości układów
sterowania
sterowania
Podział dotyczy także innych zmiennych w modelu układu sterowania i w
układzie rzeczywistym.
Sygnały odpowiadające zmiennym :
•ciągłe (analogowe) - przybierające dowolne wartości z przedziału
wartości dopuszczalnych,
•dyskretne (cyfrowe) - przybierające tylko wybrane, ściśle określone
wartości z przedziału wartości dopuszczalnych.
Większość zachodzących procesów i sygnałów ma charakter ciągły.
Często w analizie sygnały ciągłe (analogowe) przekształca się na sygnały
dyskretne i opisuje obiekt przy pomocy sygnałów dyskretnych.
Przykład 3.2
Osoby idące przemieszczają się z prędkością zmienianą ciągle w przedziale od zera
(postój) do jakiejś prędkości maksymalnej. Prędkości przemieszczania można
oceniać zmienną jakościową: idzie spacerem, idzie szybkim krokiem, biegnie.
Obserwator dokonuje dyskretyzacji wartości sygnału ciągłego.
6
Właściwości układów
Właściwości układów
sterowania
sterowania
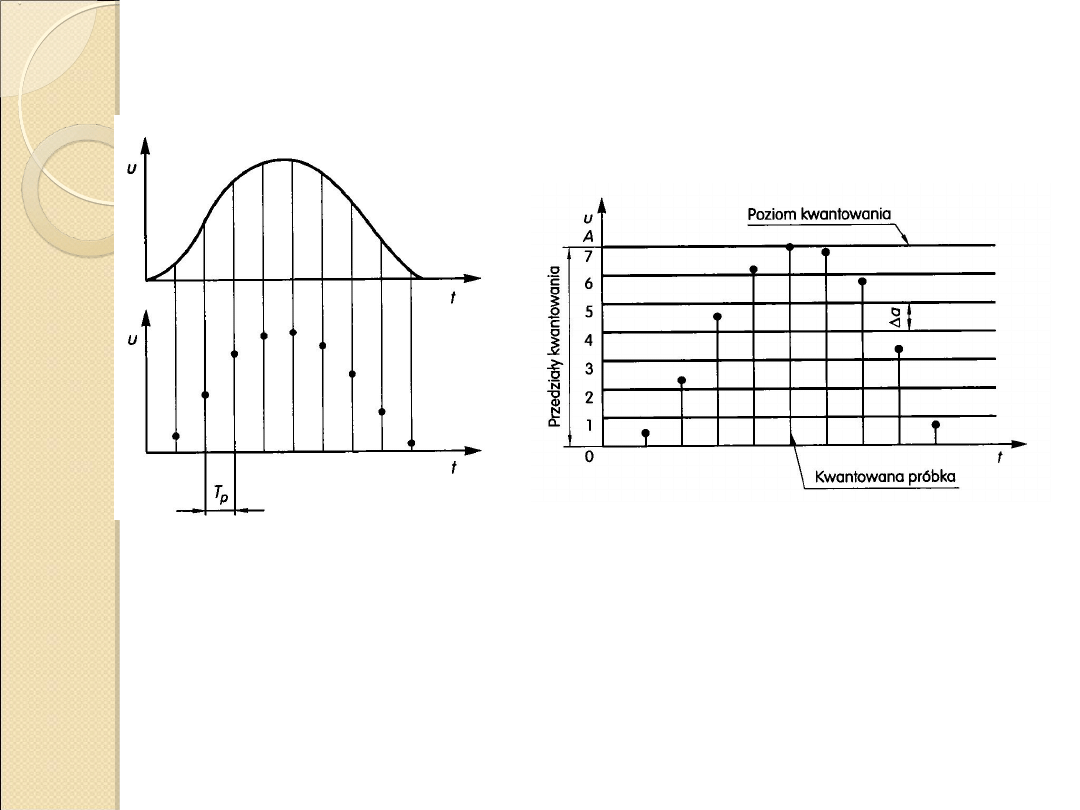
Dwa pojęcia odnoszące się do przetwarzania sygnału analogowego
(ciągłego) w sygnał dyskretny (dyskretyzacja) :
•próbkowanie (dyskretyzacja czasu, dyskretyzacja pozioma) – wyznacza
chwile pomiaru wartości sygnału. Pomiar odbywa się w określonych
chwilach, na ogół w stałych odstępach czasu. Stały odstęp czasu nazywa
się okresem próbkowania - T
p
. Liczba pomiarów wykonanych w jednostce
czasu f
p
nazywa się częstotliwością próbkowania,
f
p
= 1/T
p
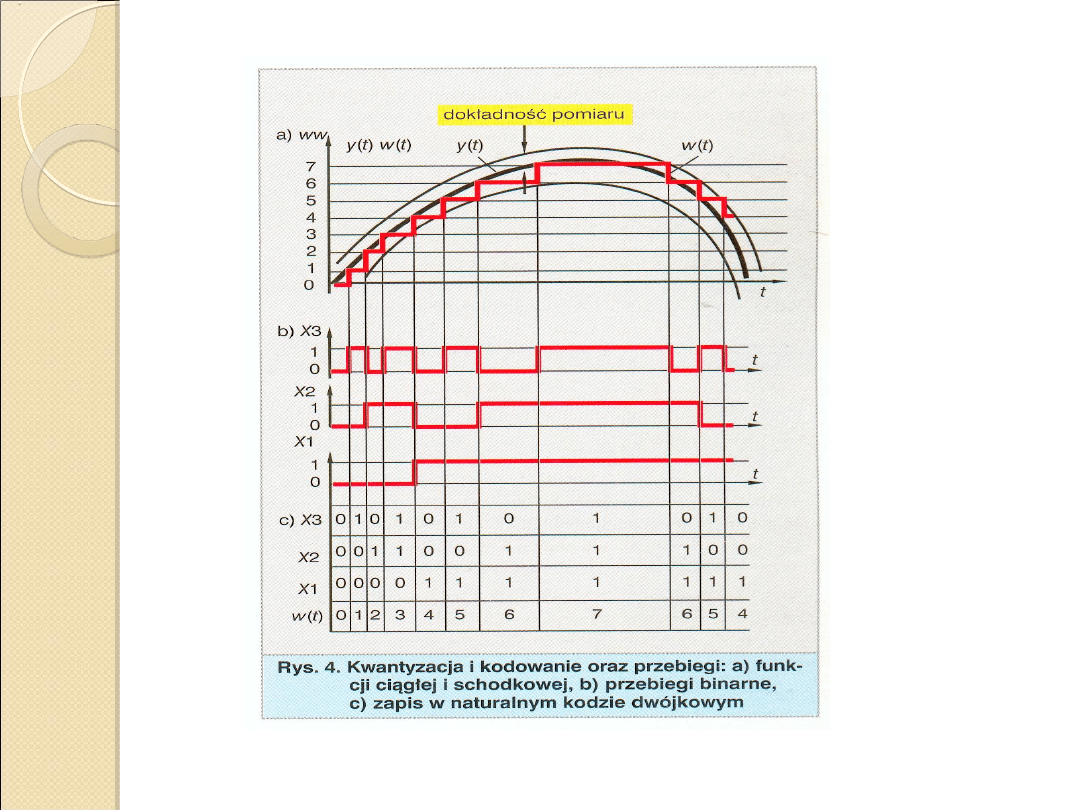
•kwantowanie (dyskretyzacja wartości, dyskretyzacja pionowa) - podział
zakresu zmienności sygnału na obszary (przedziały) i przyporządkowanie
każdemu z nich innej wartości. Wartość zmiennej w przedziale jest stała .
Przedziały są na ogół równe i nazywa się je kwantami lub skokami
kwantowania Δ
a
. Wartości przyporządkowane przedziałom nazywa się
poziomami
kwantowania.
Podczas
kwantowania
wprowadza
się
ograniczenie maksymalnej wartości sygnału, oznaczane A.
Liczbę przedziałów kwantowania S można przedstawić wyrażeniem:
S = A/ Δ
a.
7
Właściwości układów
Właściwości układów
sterowania
sterowania
Próbkowanie - dyskretyzacja czasu
Kwantowanie - dyskretyzacja
wartości
8
9
Właściwości układów
Właściwości układów
sterowania
sterowania
Właściwości układów
Właściwości układów
sterowania
sterowania
Ze względu na postać modelu matematycznego opisującego zachowanie
się obiektu (kryterium postaci modelu matematycznego) układy
automatyki dzielimy na:
•układy liniowe - do opisu stosuje się równania liniowe,
•układy nieliniowe - do opisu stosuje się równania nieliniowe.
Mówiąc układ liniowy, mamy na myśli model liniowy układu.
Dla wielu rzeczywistych procesów można znaleźć pewien obszar
działania układów, w którym mają one cechy układów liniowych.
Wyróżniono, dokładnie przebadano oraz opisano podstawowe człony
liniowe.
Do opisu właściwości układów liniowych wykorzystuje się:
•charakterystyki statyczne - zależności między sygnałami wyjściowym a
wejściowym w stanie ustalonym,
•charakterystyki dynamiczne - zależności między sygnałem wyjściowym
a zmieniającym się sygnałem wejściowym.
Do określania charakterystyk dynamicznych wykorzystywane są pewne
standardy sygnałów wejściowych,. Są to: skok jednostkowy sygnału
wejściowego, sygnał wejściowy narastający liniowo, impuls sygnału
wejściowego;
charakterystyki częstotliwościowe - określają zależność sygnału
wyjściowego
od
sygnału
wejściowego
w
postaci
przebiegu
sinusoidalnego.
Sygnał wyjściowy jest również sinusoidą o tej samej częstotliwości ale
o innej amplitudzie i przesunięty w fazie względem sygnału
wejściowego.
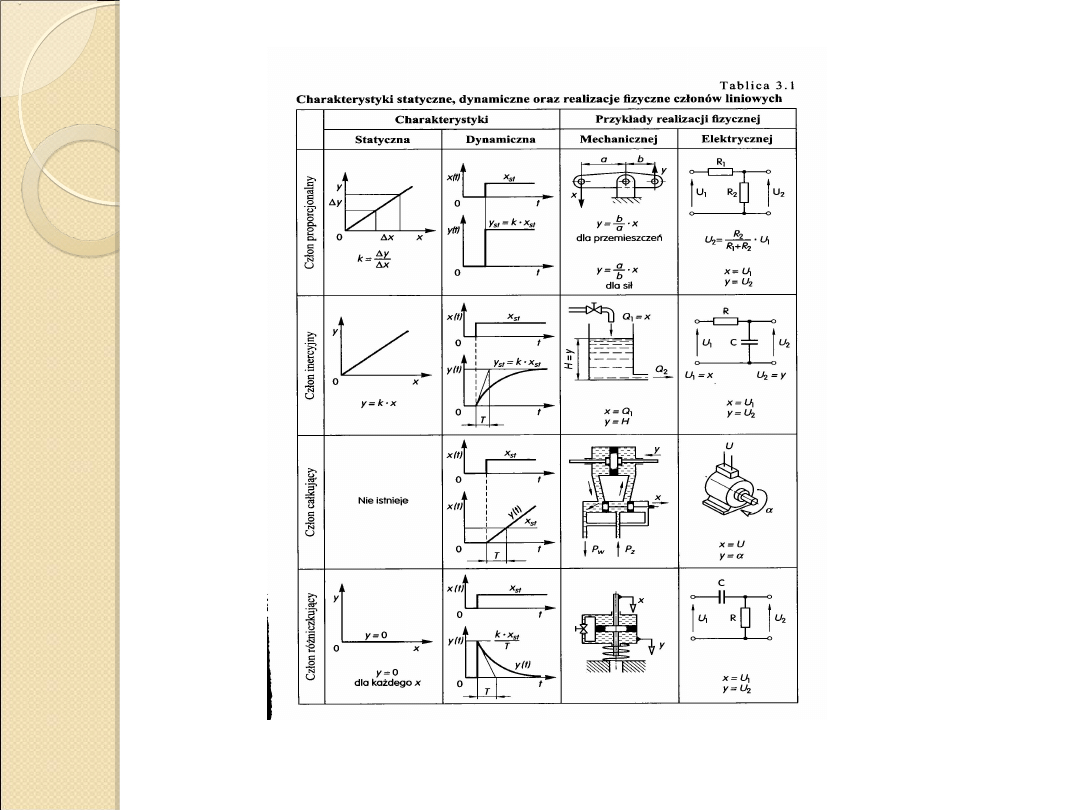
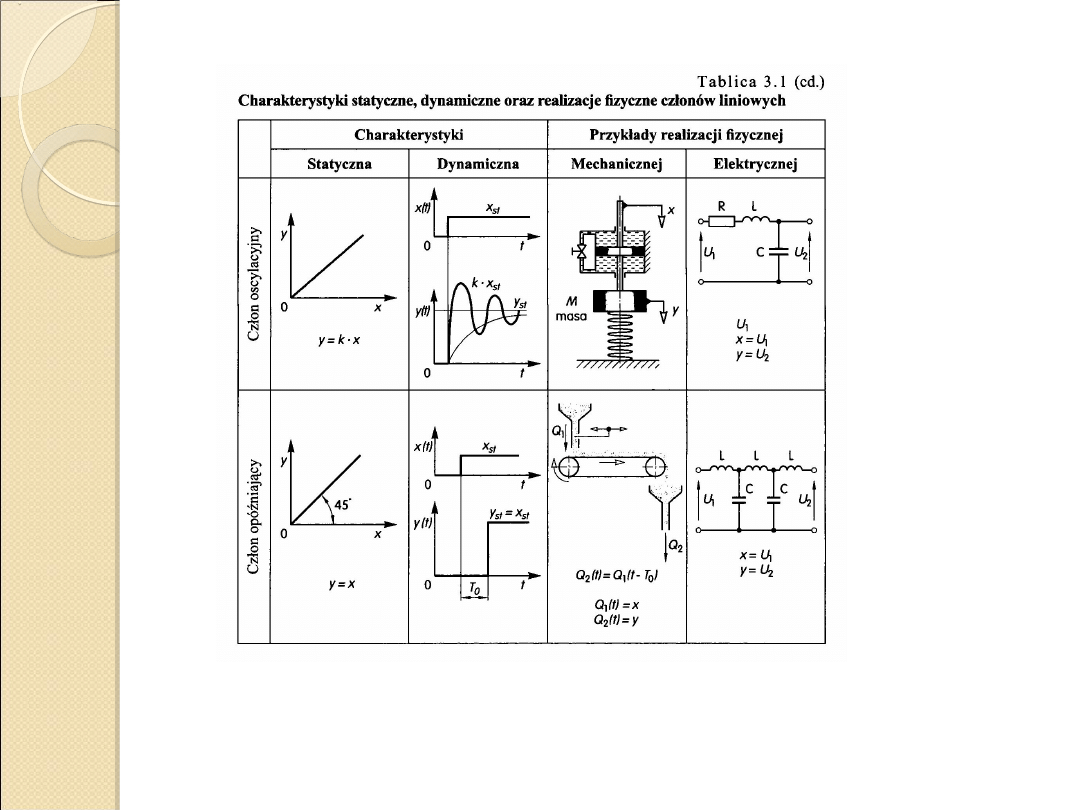
Sześć najbardziej popularnych typów podstawowych liniowych członów
dynamicznych:
l) proporcjonalny, 2) inercyjny, 3) całkujący, 4) różniczkujący, 5) oscylacyjny,
6) opóźniający.
10
Właściwości układów
Właściwości układów
sterowania
sterowania
Charakterystyki statyczne, dynamiczne (dla skoku jednostkowego
sygnału wejściowego) oraz przykłady realizacji [1].
11
Właściwości układów
Właściwości układów
sterowania
sterowania
Charakterystyki statyczne, dynamiczne (dla skoku jednostkowego
sygnału wejściowego) oraz przykłady realizacji [1].
12
13
Właściwości układów
Właściwości układów
sterowania
sterowania
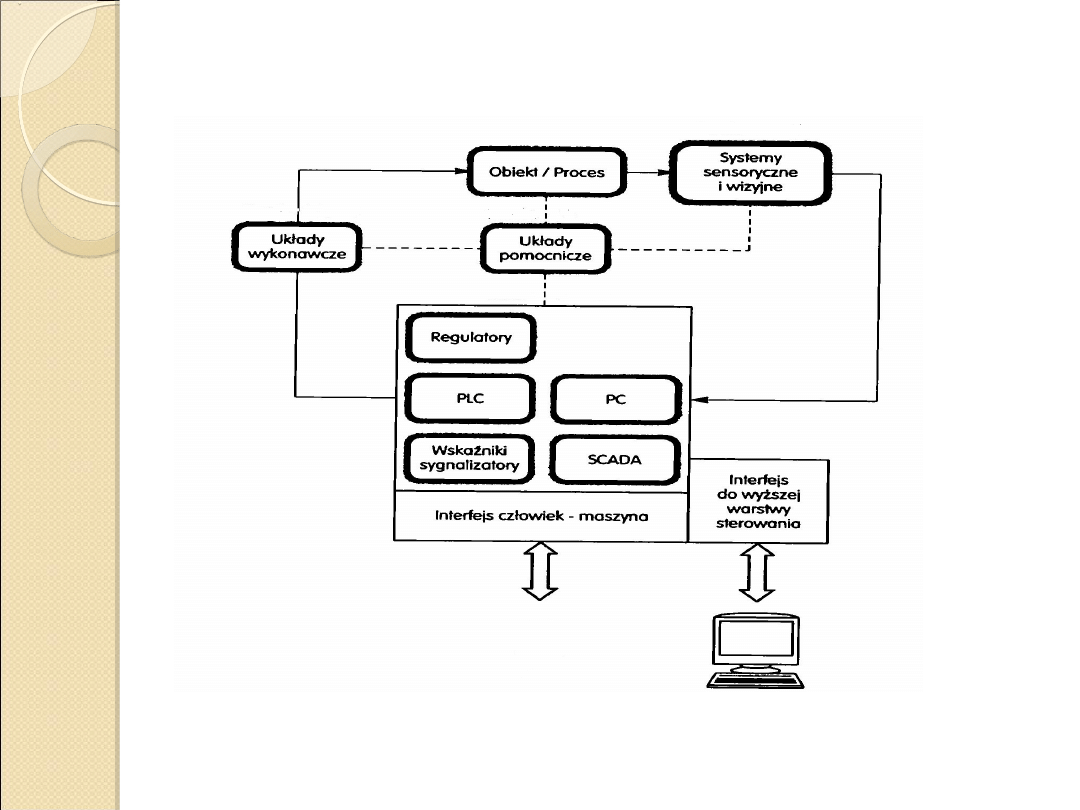
Podstawowe elementy układów
automatyki
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
Wyszukiwarka
Podobne podstrony:
Prop aut W2
Prop aut W12 Robotyka 2003
Prop aut W1 Podst poj 2003
Prop aut W9 Ses cyfr Przetworniki fotoelektryczne
e-learning prop med W2, EDUkacja, e-learning
Prop aut W9 Ses cyfr Przetworniki fotoelektryczne
Prop aut W1 Podst poj
Prop Aut Sensoryka W3
Prop aut W9 Ses cyfr Przetworniki fotoelektryczne
Prop aut W12 Robotyka
Psycholgia wychowawcza W2
ostre stany w alergologii wyklad 2003
Brasil Política de 1930 A 2003
SP dzienni w2
w2 klasy(1)
Technologia spawania stali wysokostopowych 97 2003
Pirymidyny 2003
więcej podobnych podstron