Robotyka W12
Robotyka W12
1
Robotyka W12
Historia rozwoju robotyki.
Rok 1947 - początek współczesnej robotyki przemysłowej. W Stanach
Zjednoczonych
Ameryki
opracowano
pierwszy
teleoperator
z
serwonapędami elektrycznymi.
Rok 1954 - George Devol zaprojektował pierwszy programowalny
robot.
Rok 1961 - Josepha Engelbergera (uznany za ojca robotyki), zakupił
prawa do robota Devola i założył pierwszą firmę produkującą roboty -
Unimation Company. Firma ta w roku 1961 zainstalowała wspomnianego
robota do obsługi ciśnieniowej maszyny odlewniczej w fabryce General
Motors w USA.
Duże zainteresowanie środowisk naukowo- badawczych robotyką.
Lata 60. XX w. - w Stanford University opracowano robota Stanford
Ann, który przez długi czas był bazą prac naukowych na wielu
uczelniach. W Stanford powstał pierwszy język programowania robotów
(WAVE), prowadzono prace nad systemami sterowania, kinematyką
robotów, planowaniem trajektorii i komunikacją człowiek-robot.
Rok 1961 - pierwszy robot ze sprzężeniem zwrotnym od siły.
Rok 1963 - pierwszy system wizyjny dla robota.
Rok 1974 - firmy, Cincinnati Milacron i ASEA wykorzystując wyniki
badań równocześnie wprowadziły na rynek roboty ze sterowaniem
kompu terowym: model T3 i model IRb-6/S 1.
Rok 1975 - pierwszy zysk finansowy firma Unimation.
2
Robotyka W12
Rok
1978
-
firma Unimation
zapre zentowała
robota
PUMA,
opracowanego na podstawie badań w General Motors. Jego konfiguracja
mechaniczna stała się standardem dla pewnej grupy zastoso wań, m.in.
do spawania.
Rok 1979 - pierwszy sukces odnieśli Japończycy .Robot typu SCARA po
dziś dzień dominuje w aplika cjach zrobotyzowanego montażu.
Początek lat 80. XX w. - nieprzemysłowe zastosowania robotów,
lokomocja oraz nowe formy komunikacji z człowiekiem. Oprócz
tradycyjnej robotyki przemysłowej powstaje nowa gałąź - robotyka
usługowa (z ang. Service Robotics).
Kolejne znaczące dokonania:
Rok 1996 - pierwszy panel graficzny w seryjnie produkowanym robocie
przemysłowym - KUKA,
Rok 1997 - autonomiczny robot mobilny Sojoumer na Marsie
Rok 1997 - prototyp robota człekokształtnego - firma Honda.
3
Robotyka W12
Roboty usługowe odegrały ważną rolę w wyprawach
kosmicznych,
badaniach
labiryntów
piramidy
egipskiej,
kierowaniu pojazdami
Wciąż
poszukuje
się
nowych
obszarów
zastosowań
przemysłowych (budownictwo, przemysł drzewny, spożywczy).
Wiele prac badawczych dotyczy pod niesienia efektywności i
elastyczności instalacji zrobotyzowanych, np. przez integrację
robotów z systemami wizyjnymi.
Liczebność robotów przemysłowych na świecie przekroczyła
milion. W ciągu minionych lat zasadniczym przemianom uległ
stosunek ludzi do robotów.
Poziom robotyzacji, określa tzw. gęstość robotów RD (z ang. Robot
Density), tj. liczba robotów przemysłowych przypadających na 10 tys.
zatrudnionych w przemyśle wytwórczym.
Wielkość wskaźnika : Japonia 322, Niemcy (148), Włochy (116) i
Szwecję (99). Polska (2 w 2003 roku)
4
Robotyka W12
Klasyfikacja robotów.
Podstawowy podział współczesnych robotów wyznaczają pojęcia: "robot
przemysłowy" i "robot usługowy". Oba pojęcia doczekały się wielu
definicji i interpretacji.
Roboty przemysłowe określone zostały normą ISO 8373, przyjętą w
Polsce jako PN-EN ISO 8373:2001. Zgodnie z ta normą:
„Manipulacyjny robot przemysłowy to automatycznie sterowany,
reprogramowalny, uniwersalny manipulator, programowany w trzech
lub więcej osiach, który może być zamocowany w miejscu lub się
przemieszczać, przeznaczony do zastosowań przemysłowych.”
Słowo
reprogramowalny
oznacza,
że
robot
może
zmieniać
programowane ruchy lub inne programowane funkcje, bez fizycznych
zamian samego urządzenia.
Słowo oś oznacza kierunek ruchu liniowego lub obrotowego robota.
Oznacza
również
połączenie
dwóch
członów
mechanicznych
manipulatora wyposażonych w napęd zdolny do zmiany położenia
jednego członu względem drugiego. Liczba osi manipulatora jest zawsze
mniejsza o jeden od liczby jego członów. W najprostszym przypadku
manipulator ma dwa człony mechaniczne, połączone jedną osią.
5
Robotyka W12
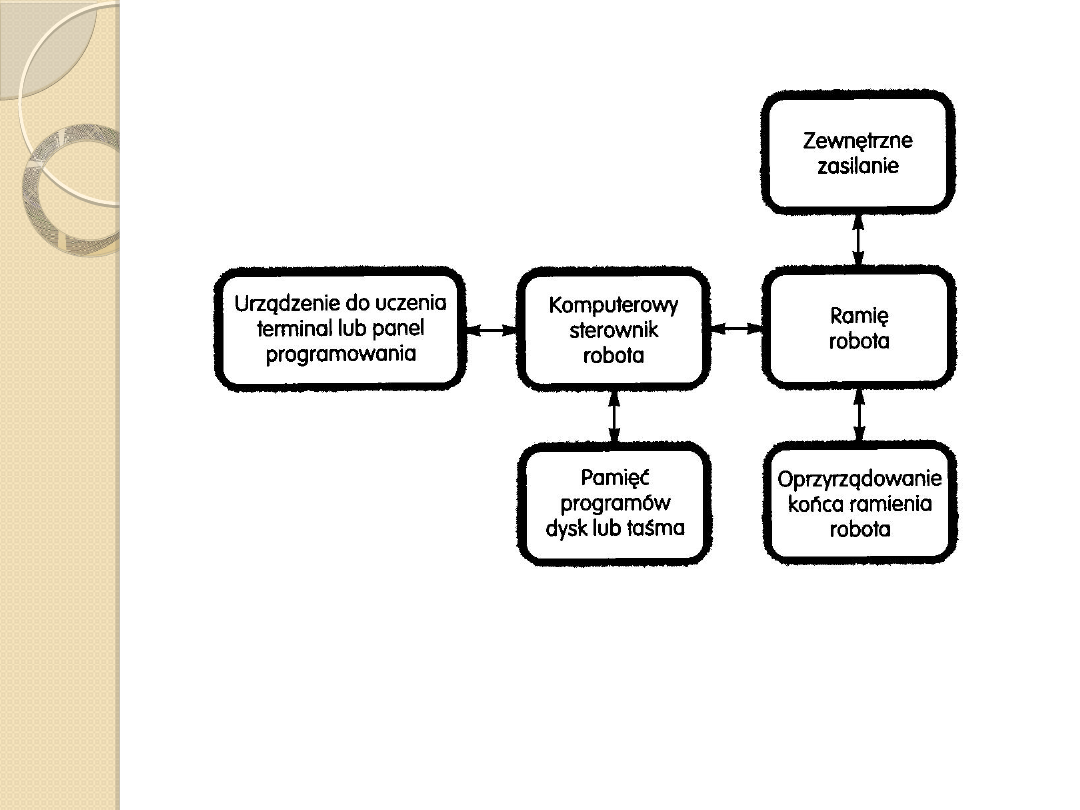
Schemat blokowy robota przemysłowego
6
Robotyka W12
Elementy funkcjonalne robota :
• część mechaniczna - nazywaną też manipulatorem robota; jest to
ramię lub układ ramion (członów) połączonych przegubami liniowymi
lub obrotowymi (rotacyjnymi), tworzących pary kinematyczne (osie)
przesuwne (liniowe, po stępowe) lub obrotowe (rotacyjne),
• napędy ramion - na ogół serwonapędy elektryczne,
• układ sterowania - najczęściej komputer sterujący z
oprzyrządowaniem,
• oprzyrządowanie końca ramienia - tzw. narzędzie robota (z ang. tool),
może to być chwytak, przyrząd technologiczny (wiertarka,
zgrzewadło) lub pomiarowy (np. czujnik odległości, kamera),
• czujniki - wewnętrzne i zewnętrzne,
• zewnętrzne źródło zasilania.
Współczesne układy sterowania są z reguły wyposażone w terminale
lub panele programowania służące do operowania robotem i tworzenia
programu aplikacyjnego.
Integralną częścią nowoczesnego układu sterowania jest jego
oprogramowanie systemowe, tzw. główny (podstawowy) program
sterujący robota. Decyduje ono o cechach robota, jego możliwościach i
predyspozycjach do wykonywania konkretnych zadań na stanowiskach
aplikacyjnych.
Podział ze względu na liczba osi (kryterium klasyfikacji):
• 3-osiowe ,
• 4-osiowe ,
• 5 lub więcej osi.
Podział ze względu na maksymalny udźwig: 6, 40 lub 120 kg.
Udźwig określa zakres stosowania robota i jest zawsze podawany przez
producentów.
7
Robotyka W12
Konfiguracje
mechaniczne
robotów,
ich
elementy
konstrukcyjne i własności funkcjonalne.
Konfiguracje mechaniczne robotów, ich elementy konstrukcyjne.
Robot składa się z manipulatora oraz układu sterowania (patrz norma
PN-EN 775:1998).
Jest urządzeniem wykonującym ruchy przestrzenne elementu roboczego
(tzn. chwytaka lub narzędzia) zgodnie z programem zapisanym w
pamięci jego układu sterowania.
Zmienne określające ruch elementu roboczego w przestrzeni nazywamy
stopniami swobody robota (z ang. DOF - Degree of Freedom), a ich
liczbę opisującą jednoznacznie stan (pozycję) robota - liczbą stopni
swobody.
Do operowania w przestrzeni robotowi wystarczy sześć stopni swobody
- trzy określające położenie elementu roboczego w przestrzeni i trzy
określające jego orientację.
Położenie obiektu w przestrzeni względem robota polega na związaniu z
tym obiektem kartezjańskiego układu współrzędnych i przedstawieniu
jego położenia w innym kartezjańskim układzie współrzędnych,
nieruchomym względem robota.
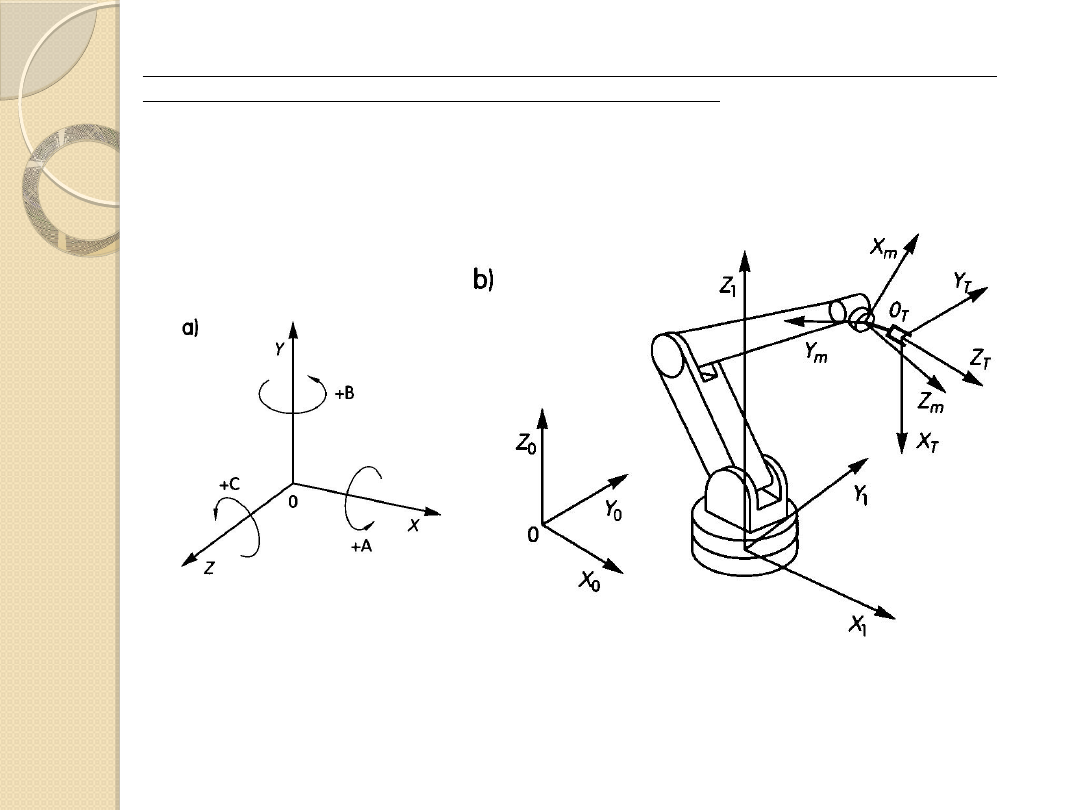
Pozycja elementu może być wtedy dokładnie określona przez podanie
sześciu parametrów :
trzech współrzędnych liniowych X, Y, Z ( określających położenie)
trzech współrzędnych kątowych A, B, C (określających orientację
elementu roboczego w układzie współrzędnych).
8
Robotyka W12
Do opisu robotów wg PN-EN ISO 9787:2003 (U) stosuje się cztery
kartezjańskie układy współrzęd nych (rys 11.1b):
l) globalny X
0
,Y
0
, Z
0
,
2) podstawowy X
1
, Y
1
, Z
1
,
3) interfejsu mechanicznego X
m
, Y
m
, Z
m
,
4) narzędzia X
r
, Y
r
, Z
r
.
gdzie: m - liczba osi robota.
Układy współrzędnych stosowane w robotyce: a) prawoskrętny układ
współrzędnych, b) układy współrzędnych: globalny - X
0
,Y
0
, Z
0
,
podstawowy – X
1
, Y
1
, Z
1
, interfejsu mechanicz nego – X
m
, Y
m
, Z
m
,
współrzędnych narzędzia – X
r
, Y
r
, Z
r
.
9
Robotyka W12
Układ współrzędnych podstawowy (nazywany też bazowy) X
1
, Y
1
, Z
1
,
jest związany z podstawą robota lub inną powierzchnią montażową.
Osie X
1
, Y
1
, leżą w płaszczyźnie mocowania robota. Dodatni zwrot osi
Z
1
, jest skierowany od powierzchni mocowania robota.
Układ współrzędnych interfejsu mechanicznego X
m
, Y
m
, Z
m
, jest
związany z interfejsem mechanicznym robota, tj. z tą częścią
ostatniego członu, do której mocuje się narzędzie. Osie X
m
, Y
m
, leżą w
płaszczyźnie interfejsu, a dodatni zwrot osi Z
m
, jest skierowany od
interfejsu do narzędzia. Interfejsem mechanicznym (przyłączem) jest
na ogół tarczka z otworami gwintowanymi, znajdująca się na końcu
ostatniego członu manipulatora. W mniejszych robotach stosuje się
interfejsy trzpieniowe.
Interfejsy mechaniczne (tarczowe i trzpieniowe) są znormalizowane -
PN-EN ISO 9409-2:2004 (U) i PN-EN ISO 9787:2003 (U). Dzięki temu
łatwo można dobrać narzędzia produkowane przez specjalistyczne
firmy do różnych robotów przemysłowych.
Układ współrzędnych narzędzia X
r
, Y
r
, Z
r
. odnosi się do narzędzia lub
elementu roboczego związanego z interfejsem mechanicznym.
10
Robotyka W12
Do opisu pozycji robota podaje się położenie układu współrzędnych
narzędzia lub interfejsu mechanicznego w układzie podstawowym
robota lub układzie globalnym - nazywamy je pozycją zewnętrzną
robota.
Każdej pozycji zewnętrznej (opisanej przez podanie współrzędnych w
układzie kartezjańskim) odpowiada określona pozycja wewnętrzna,
zapisywana jako wektor. Składowe tego wektora określają położenia
poszczególnych osi robota. Przeliczenie pozycji wewnętrznej na pozycję
zewnętrzną nazywa się prostym zadaniem kinematyki.
Wyznaczenie pozycji wewnętrznej na podstawie pozycji zewnętrznej jest
nazywane odwrotnym zadaniem kinematyki.
Oba zadania są rozwiązywane w układzie sterowania robota.
W tym celu tworzy się tzw. model kinematyczny manipulatora robota,
który ma postać układu równań matematycznych, opisujących zależność
obu pozycji: wewnętrznej i zewnętrznej. Parametrami tego modelu są
wielkości opisujące budowę manipulatora, m.in. długości ramion oraz
przełożenia przekładni redukcyjnych.
11
Robotyka W12
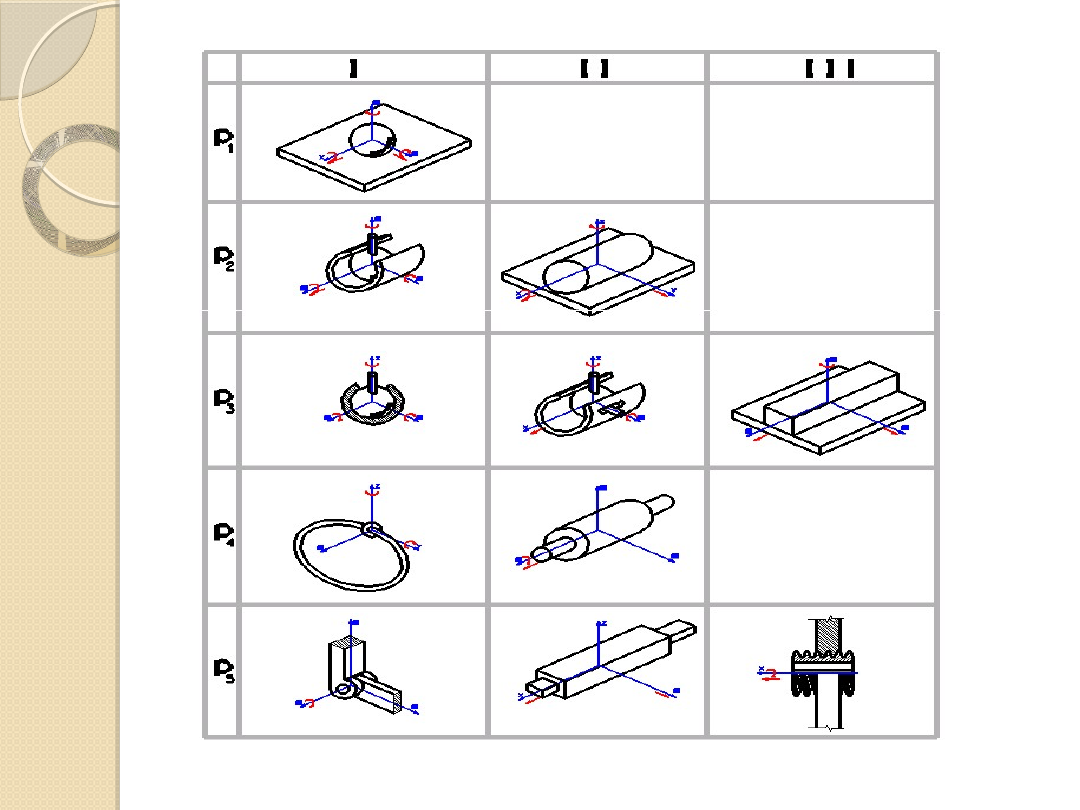
Konstrukcje mechaniczne robotów przemysłowych składają się z
członów (ramion) połączonych przegubami, tworzących razem tzw. pary
kinematyczne.
Wyróżnia się pięć klas par kinematycznych, oznaczanych od I do V,
przy czym pary klasy V mają jeden stopień swobody, klasy IV – dwa
itd..
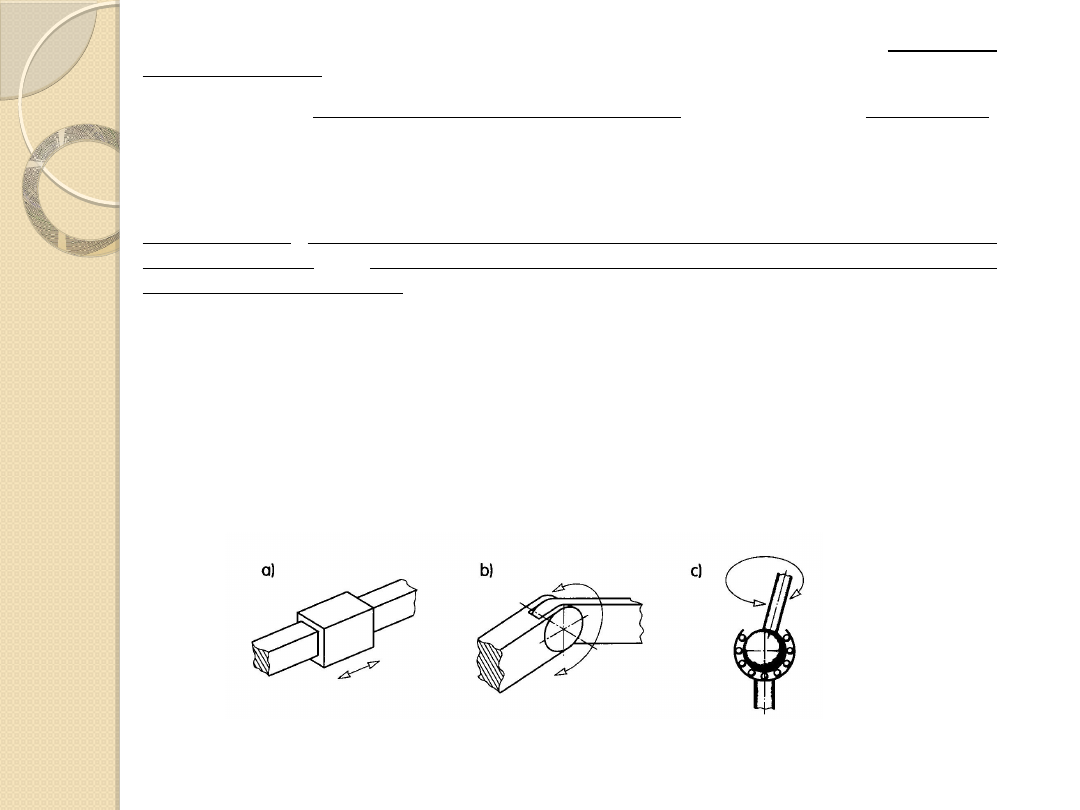
W konstrukcjach współczesnych robotów wykorzystuje się najczęściej
pary klasy V: obrotowe - wtedy mówimy o obrotowej (rotacyjnej) parze
kinematycznej lub postępowe - wtedy mówimy o liniowej (postępowej)
parze kinematycznej .
Spotkać można również pary IV klasy, np. przegub kulisty. Połączone
pary kinematyczne tworzą tzw. łańcuch kinematyczny. Liczba par
kinematycznych w łańcuchu określa liczbę
w stopni swobody
robota
, według ogólnego wzoru:
5
1
6
i
i
p
i
n
w
w którym: n - liczba par kinematycznych, i- numer klasy, p
i
-liczba par
klasy i.
Pary kinematyczne: a) liniowa, b) obrotowa, c)
przegub kulisty
12
Robotyka W12
13
Robotyka W12
Większość dzisiejszych robotów przemysłowych ma sześć lub pięć stopni
swobody.
Klasyfikacje robotów wg PN-EN ISO 8373:2001 uwzględniają na ogół
pierwsze trzy pary kinematyczne, które tworzą tzw. ramię robota.
Nadgarstek, nazywany również kiścią ( czyli ostatnie dwie lub trzy pary
kinematyczne ), jest traktowany osobno.
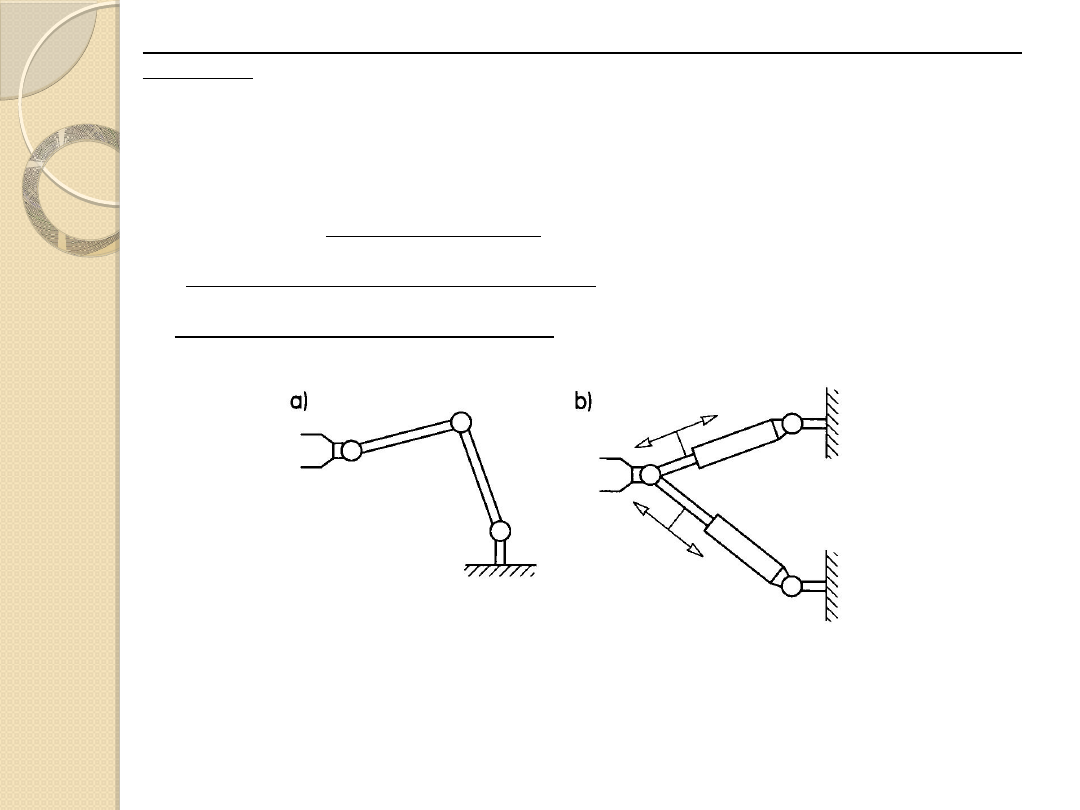
Ze względu na budowę ramienia roboty przemysłowe można podzielić na
dwie grupy:
1) roboty o strukturze szeregowej, które są złożone z szeregowo
połączonych członów (par kinematycznych ),
2) roboty o strukturze równoległej, złożone z równolegle połączonych par
kinematycznych.
Struktury kinematyczne robotów przemysłowych: a) szeregowa, b)
równoległa.
14
Robotyka W12
Najczęściej spotykane konfiguracje robotów szeregowych
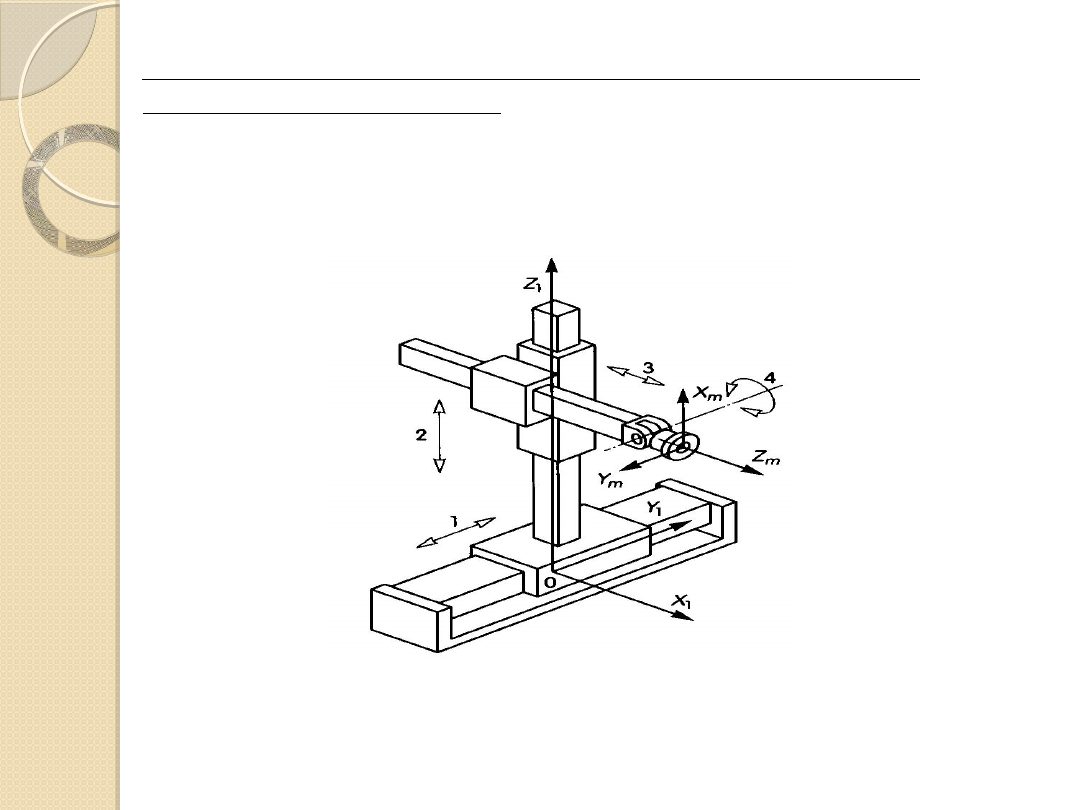
Konfiguracja
kartezjańska.
Przestrzenią
roboczą
robota
kartezjańskiego jest prostopadłościan. Robot składa się z par
kinematycznych liniowych, umożliwiających realizację ruchów wzdłuż
bazowego układu współrzędnych X
1
, Y
1
, Z
1
. Z ostatnim członem może
być związana para obrotowa, umożliwiająca realizację ruchu
obrotowego (4) nadgarstka.
Konfiguracja kartezjańska; 1 - 4 - sposób realizacji ruchu, X
1
, Y
1
, Z
1
, -
bazowy układ współrzędnych, - X
m
, Y
m
, Z
m
, układ interfejsu
mechanicznego
15
Robotyka W12
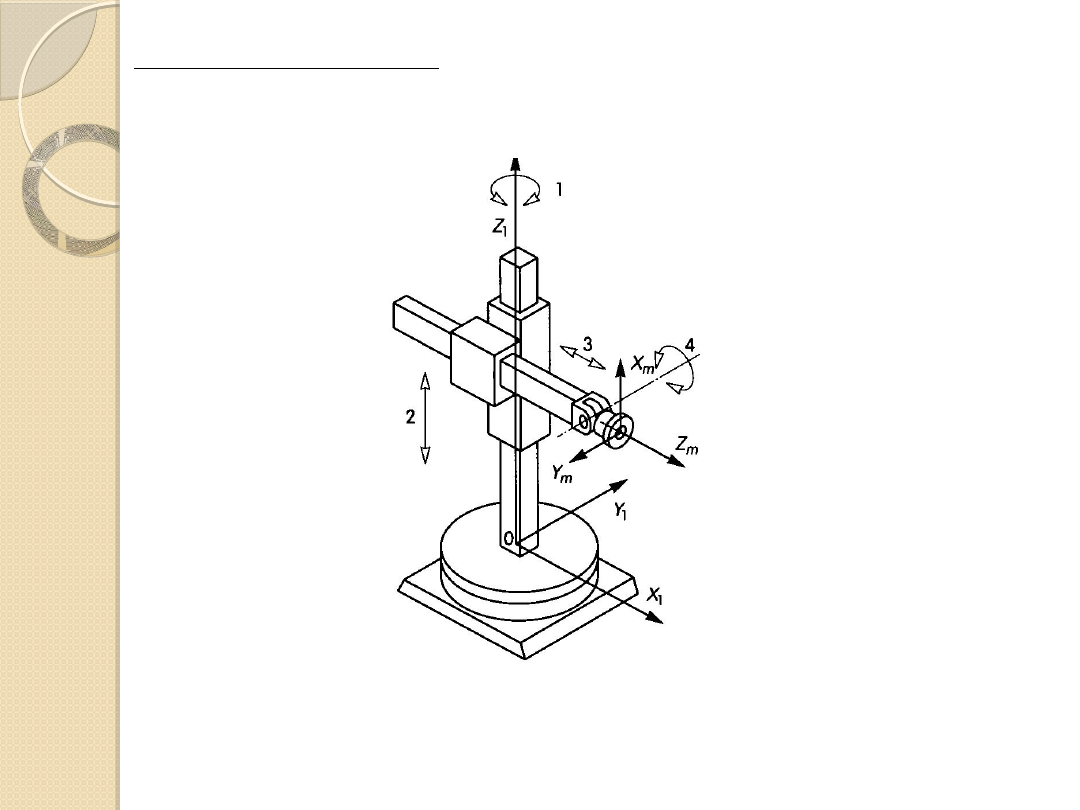
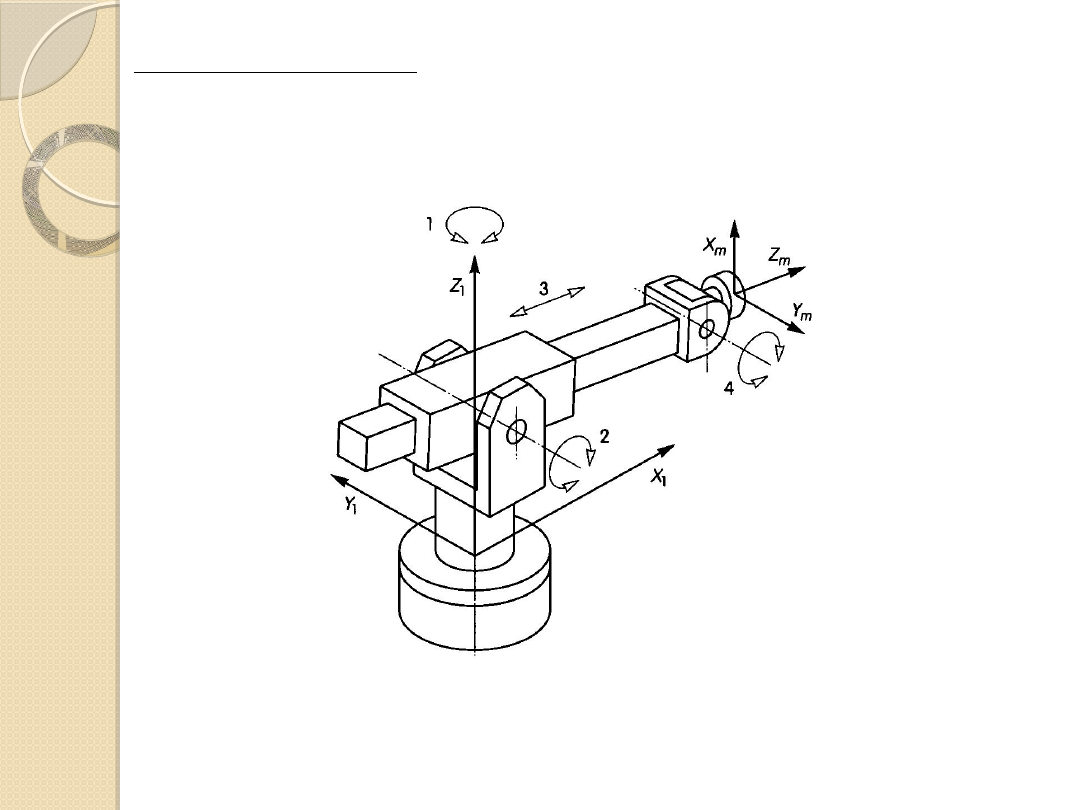
Konfiguracja cylindryczna. Przestrzenią roboczą jest drążony walec o osi
Z
1
. Robot ma w podstawie parę kinematyczną obrotową, umożliwiającą
obrót (1) względem osi Z
1
. Pozostałe pary ki nematyczne umożliwiają
realizację ruchów liniowych.
Konfiguracja cylindryczna; 1 - 4 sposób realizacji ruchu, X
1
, Y
1
, Z
1
, - ba
zowy układ współrzędnych, X
m
, Y
m
, Z
m
, - układ interfejsu
mechanicznego
16
Robotyka W12
Konfiguracja sferyczna. Przestrzenią roboczą jest sfera (wycinek kuli).
Robot ma w podstawie parę obrotową, umożliwiającą obrót (1)
względem osi Z
1
. Wysuwne ramię (para postępowa) jest zamocowane na
zespole (parze obrotowej) realizującym ruch względem osi Y
1
.
Konfiguracja sferyczna; 1 - 4- sposób realizacji ruchu, X
1
, Y
1
, Z
1
, -
bazowy
układ
współrzędnych,
X
m
,
Y
m
,
Z
m
,
układ
interfejsu
mechanicznego
17
Robotyka W12
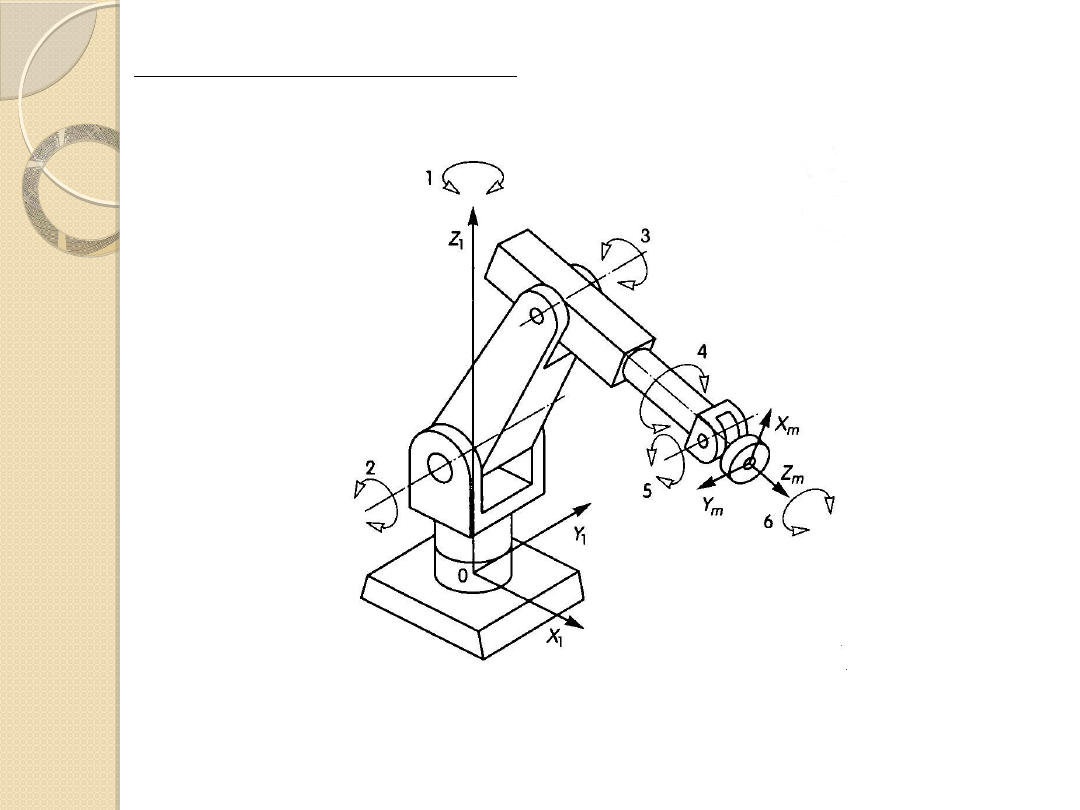
Konfiguracja antropomorficzna. Przestrzeń roboczą stanowi wycinek
torusa. Robot składa się z co najmniej trzech par obrotowych o osiach
równoległych poziomych oraz jednej osi pionowej w podstawie robota.
Na rysunku jest przedstawiony robot sześcioosiowy.
Konfiguracja antropomorficzna 1 - 6 - sposób realizacji ruchu, X
1
, Y
1
,
Z
1
, - bazowy układ współrzęd nych, - X
m
, Y
m
, Z
m
, układ interfejsu
mechanicznego
18
Robotyka W12
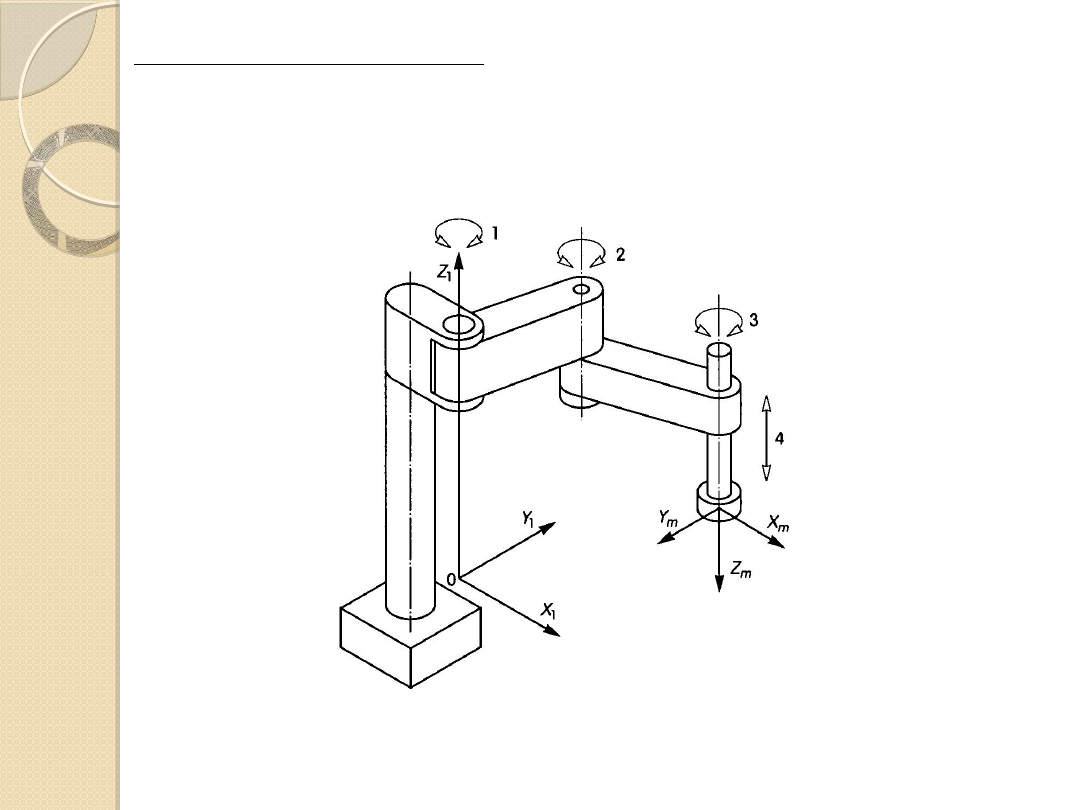
Konfiguracja typu SCARA . Przestrzenią roboczą jest walec drążony.
Robot składa się z połączonych szerego wo trzech par obrotowych, o
osiach równoległych pionowych. Ostatnia, czwarta para jest liniowa i
umożliwia wykonywanie przez nadgarstek ruchów postępo wych (4) w
kierunku pionowym.
Konfiguracja typu SCARA
19
Robotyka W12
Roboty równolegle stanowią nową rodzinę konfiguracji robotów.
Charakterystyczne cechy - zalety: niewielka masa elementów
ruchomych, duża sztywność, duża precyzja pozycjonowania oraz
możliwość wykonywania krótkich, ale bardzo szybkich ruchów.
Wada - względnie mała przestrzeń robocza.
Najbardziej znane konstrukcje robotów równoległych :
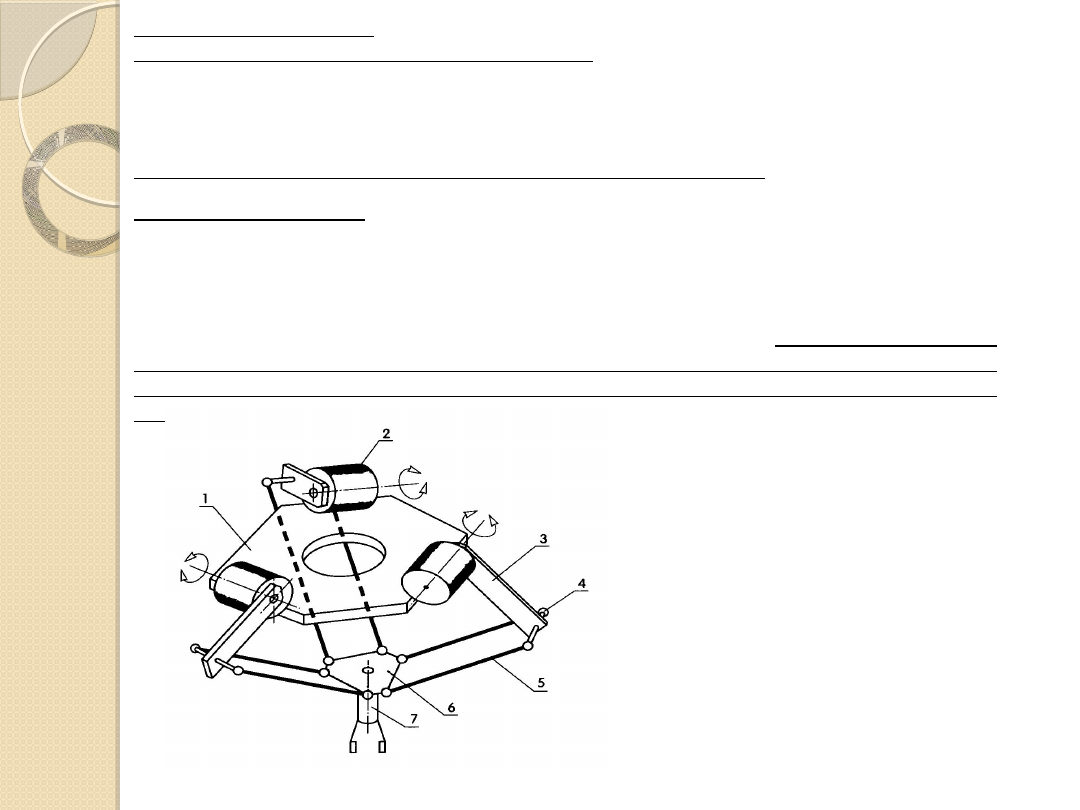
Robot typu delta składa się trzech ramion (robot trzyosiowy),
rozstawionych co 120°, połączonych z płytą 6 przegubami kulistymi 4.
Do płyty tej jest mocowany chwytak 7. Każde ramię składa się z cięgien
5, zakończonych z obu stron przegubami kulistymi 4. Ramię porusza
dźwignię 3, która jest osadzona końcem na wale układu napędowego 2,
składającego się z silnika i przekładni redukcyjnej. Roboty typu delta
stosuje się głównie w przemysłach spożywczym, cukierniczym i
farmaceutycznym do pakowania do pudełek małych przedmiotów (np.
cukierków, czekoladek, tabletek).
Konfiguracja typu delta; 1 -
płyta podstawy robota, 2 - wał
układu
napędowego,
3
-
dźwignia, 4- przegub kulisty, 5-
cięgno, 6 - płyta
20
Robotyka W12
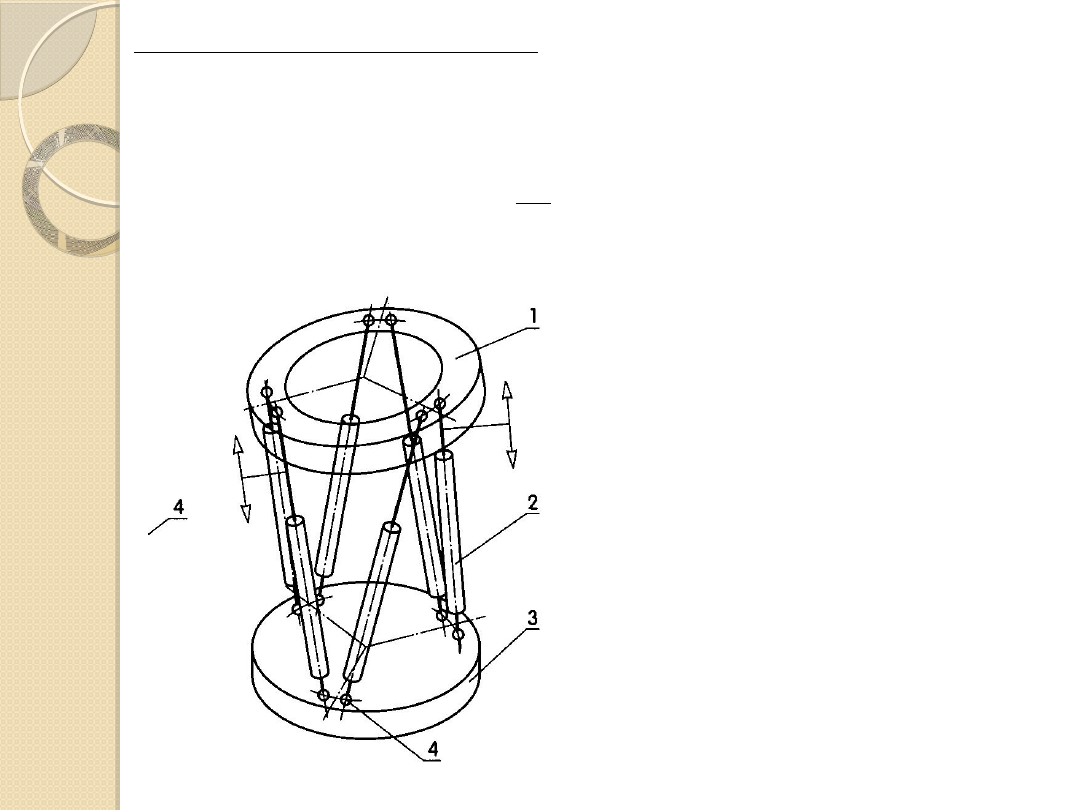
Robot typu platforma Stewarda składa się z płyty ruchomej 1 oraz
płyty podstawy 3, połączonych ze sobą za pomocą sześciu siłowników
liniowych 2 (robot sześcioosiowy). Siłowniki parami tworzą literę v.
Siłowniki z płytami są połączone za pomocą przegubów kulistych 4.
Umożliwia to dowolne przestrzenne, bardzo precyzyjne pozycjonowanie
płyty 1 w obszarze pracy robota. Roboty tego typu są bardzo sztywne i
dlatego są stosowane m.in. do precyzyjnego, przestrzennego
pozycjonowania narzędzi i urządzeń optycznych w fizyce i astronomii
oraz do precyzyjnego prowadzenia narzędzi chirurgicznych, zwłaszcza
w neurochirurgii.
Konfiguracja typu platforma
Stewarda ;1 - płyta ruchoma, 2 -
siłow nik elektryczny, 3 -
podstawa, 4 - przegub kulisty
21
Robotyka W12
Roboty specjalizowane mają bardziej złożone układy kinematyczne,
dostosowane do specyficznych zadań.
Buduje się także roboty, które stanowią połączenie dwóch typowych
konfiguracji, np. roboty portalowe, nazywane również bramowymi.
Składają się one z portalu z torem jezdnym, po którym porusza się
wózek. Na wózku tym jest mocowany manipulator np. o strukturze
przegubowej.
Ostatnio wiele firm oferuje moduły napędowe, tj. pary kinematyczne
wyposażone w napędy. Moduły te można łączyć ze sobą w konfiguracje.
Konstrukcję taką nazywa się robotem modułowym.
Dostępne są zarówno moduły ruchów liniowych, jak i obrotowych.
Roboty modułowe są najczęściej wyposażone w napędy pneumatyczne
lub elektryczne i służą do międzyoperacyjnego transportu części (np. w
operacjach montażu automatycznego ).
22
Document Outline
- Robotyka W12
- Robotyka W12
- Robotyka W12
- Robotyka W12
- Robotyka W12
- Robotyka W12
- Robotyka W12
- Robotyka W12
- Robotyka W12
- Robotyka W12
- Robotyka W12
- Robotyka W12
- Robotyka W12
- Robotyka W12
- Robotyka W12
- Robotyka W12
- Robotyka W12
- Robotyka W12
- Robotyka W12
- Robotyka W12
- Robotyka W12
- Robotyka W12
Wyszukiwarka
Podobne podstrony:
Prop aut W12 Robotyka 2003
Prop aut W9 Ses cyfr Przetworniki fotoelektryczne
Prop aut W1 Podst poj 2003
Prop aut W2 2003
Prop aut W9 Ses cyfr Przetworniki fotoelektryczne
Prop aut W2
Prop aut W1 Podst poj
Prop Aut Sensoryka W3
Prop aut W9 Ses cyfr Przetworniki fotoelektryczne
RSA sciaga, Automatyka i robotyka air pwr, VI SEMESTR, Rozproszone systemy aut
RSA kolokwium, Automatyka i robotyka air pwr, VI SEMESTR, Rozproszone systemy aut
prop onkologii ( paliatywna)
W12 mod
BHP roboty murarskie
w12
więcej podobnych podstron