MECHANIKA NIEBA
WYKŁAD 6
09.04.2008 r
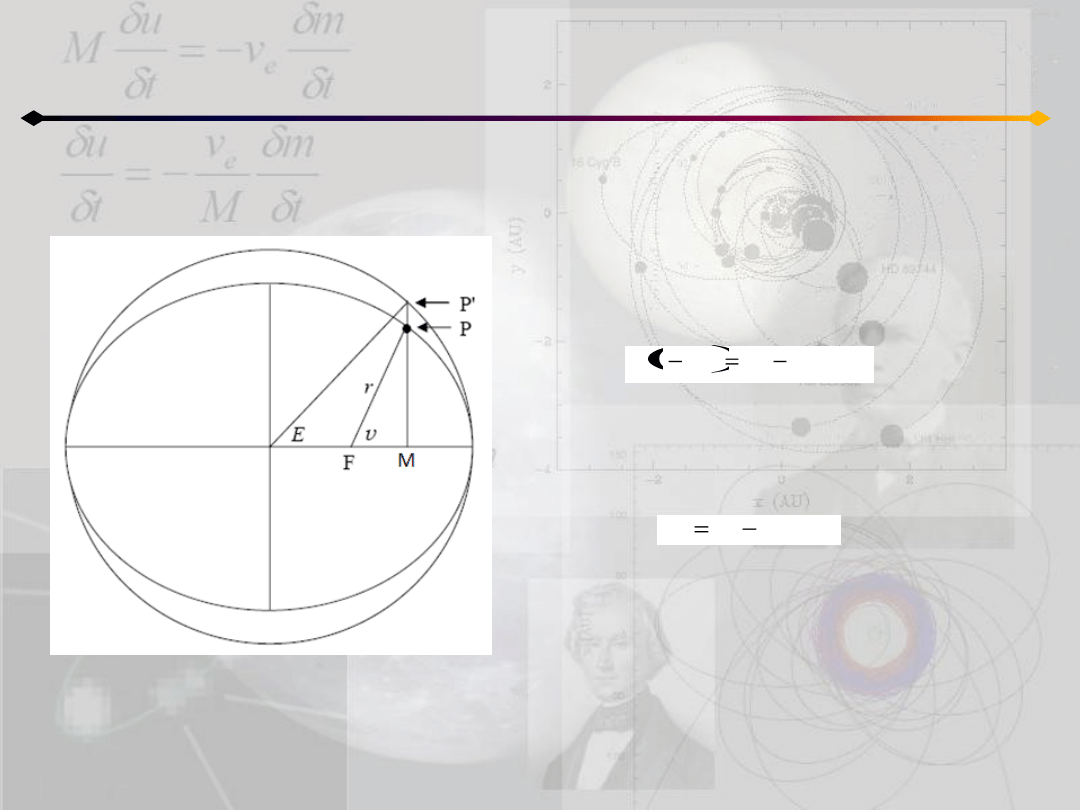
Położenie punktu na orbicie
h=0 (uzupełnienie)
Π
r
P
O
q
υ
cos
e
1
p
r
h=0 oznacza ruch po paraboli (e=1):
całka pól:
łącząc powyższe równania otrzymujemy:
q
2
p
2
sec
q
r
2
c
dt
d
r
2
2
c
p
q
2
dt
d
r
2
dt
q
2
d
2
sec
q
4
2
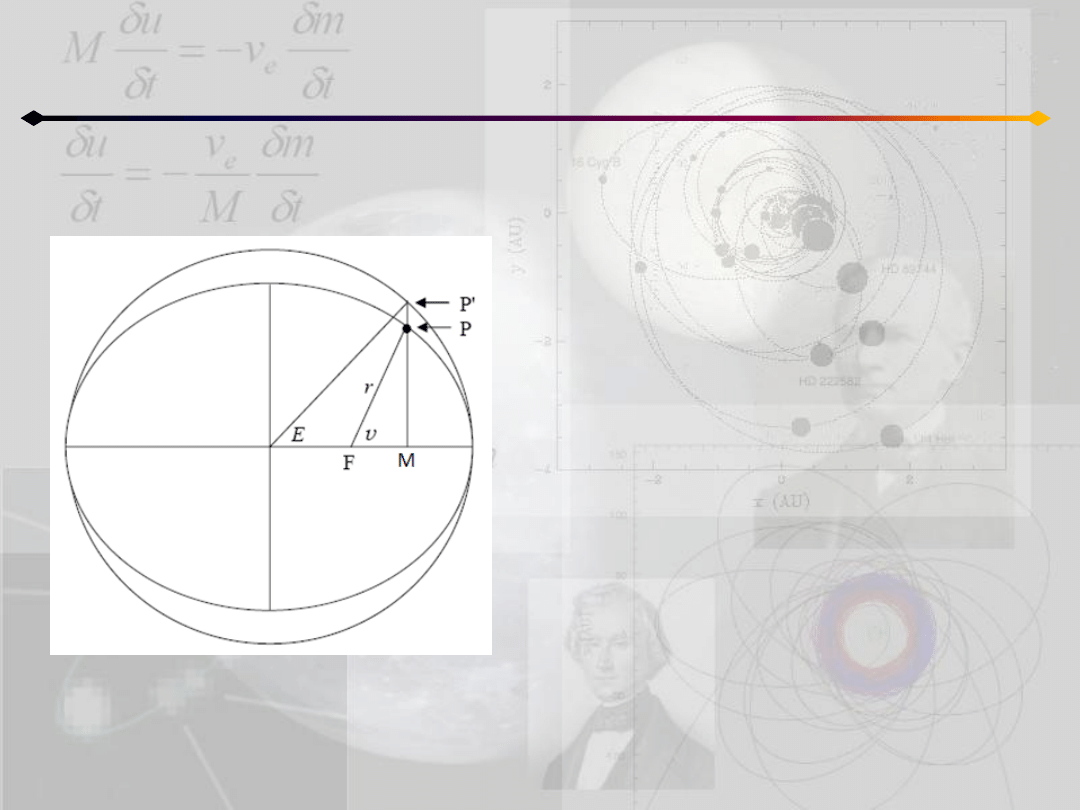
Położenie punktu na orbicie
h=0 (uzupełnienie)
Π
r
P
O
q
υ
Całkując otrzymane równanie dostajemy
równanie Barkera:
oznaczając ruch średni:
i wykorzystując uzyskaną wcześniej zależnośd:
można przepisad równanie Barkera w postaci:
2
3
3
q
T
t
2
2
tg
3
1
2
tg
3
q
2
n
E
c
2
tg
T
t
E
2
c
E
6
1
2
3
Położenie punktu na orbicie
h=0 (uzupełnienie)
Π
r
P
O
q
υ
Różniczkując wyrażenie:
i uwzględniając uzyskane wcześniej:
otrzymujemy:
które uzasadnia wcześniejszy wybór stałej k
r
nq
2
tg
dt
d
;
q
2
n
3
E
c
2
tg
dt
dE
r
Położenie punktu na orbicie
h≠0
O
W tym wypadku mamy trzy możliwe rodzaje
ruchu:
a) liniowy – c=0
b) hiperboliczny – c≠0, h>0
c) eliptyczny – c≠0, h<0
Rozpatrzmy równanie (5.5):
h
r
r
2
c
dE
dr
k
2
2
2
2
Położenie punktu na orbicie
h≠0
O
oznaczając:
h
h
h
;
h
2
a
;
a
k
2
możemy przekształcid do postaci:
2
2
2
r
h
ar
2
ac
dE
dr
a następnie korzystając z relacji (5.3):
uzyskujemy:
2
2
2
hc
2
1
e
2
2
2
2
r
h
a
h
h
e
a
dE
dr
Położenie punktu na orbicie
h≠0
O
definiując nową zmienną ρ(E):
otrzymujemy:
r
h
a
ea
h
h
dE
d
2
2
Rozwiązaniami takiego równania są (poza
przypadkami ρ= 1):
0
h
,
K
E
cos
0
h
,
K
E
cosh
2
1
(5.6)
Położenie punktu na orbicie
h≠0
O
Podobnie jak to było robione dla przypadku
h=0, z całkowania równania:
dostajemy:
dE
r
dt
k
dE
r
T
t
a
T
t
k
E
0
Używając tego w równaniach (5.6):
0
h
,
dE
E
cos
e
1
a
T
t
a
0
h
,
dE
1
E
cosh
e
a
T
t
a
E
0
E
0
Położenie punktu na orbicie
h<0
O
Drugie z otrzymanych równao odpowiada
przypadkowi orbity eliptycznej.
Uwzględniając trzecie prawo Keplera możemy
je przekształcid do postaci:
E
sin
e
E
T
t
n
Wprowadzając anomalię średnią M dostajemy
ostatecznie równanie Keplera:
które pozwala otrzymad T – czas przejścia przez
perycentrum w ruchu eliptycznym
Postępując podobnie otrzymamy analogiczne
równanie dla hiperboli.
E
sin
e
E
M
Położenie punktu na orbicie
h<0
O
Równanie Keplera ma prostą postad, ale nie
istnieje jego dokładne rozwiązanie.
Jego przybliżone rozwiązania można podzielid
na dwie grupy:
a) analityczne – z własności funkcji
sinus dokonuje się rozwinięcia w
szereg
b) numeryczne – wykorzystując różne
metody rozwiązywania równao
nieliniowych otrzymuje się przybliżenia
o różnym stopniu zbieżności i
dokładności
Położenie punktu na orbicie
Rozwiązanie równania Keplera
Na początku należałoby pokazad, że to równanie ma jedno i tylko jedno rozwiązanie.
W tym celu rozpatrzymy funkcję:
oraz załóżmy:
M
E
sin
e
E
E
F
1
n
M
n
W takim razie:
Funkcja F(E) ma co najmniej jeden pierwiastek w rozpatrywanym przedziale
0
M
1
n
1
n
F
0
M
n
n
F
Położenie punktu na orbicie
Rozwiązanie równania Keplera
Zróżniczkujmy funkcję F(E):
iloczyn ecosE jest mniejszy od 1 (mamy do czynienia z elipsą), czyli funkcja jest
rosnąca w całym przedziale.
Wnioskujemy stąd, że mamy tylko jeden pierwiastek w przedziale (nπ,(n+1)π).
E
cos
e
1
dE
E
dF
Następnym krokiem w rozwiązaniu równania Keplera jest znalezienie zerowego
przybliżenia rozwiązania.
Położenie punktu na orbicie
Rozwiązanie równania Keplera
Zerowe przybliżenie może byd liczone na wiele różnych sposobów.
1. Jeśli mamy kilka wyznaczonych wartości E dla kilku dat to następną otrzymujemy
poprzez ekstrapolację.
2. Można skorzystad z jednej z wielu metod graficznych, np.:
3. Znając M i e możemy także skorzystad z rozwinięcia w szereg:
rysujemy w jednym układzie współrzędnych dwie krzywe:
i znajdujemy E, dla którego przecinają się
M
E
e
1
y
;
E
sin
y
M
2
sin
e
2
1
M
sin
e
M
E
2
0
Położenie punktu na orbicie
Rozwiązanie równania Keplera
Znalezione zerowe przybliżenie, E
0
może zostad uściślone w następujący sposób.
Mamy:
gdzie E jest dokładną wartością. Chcemy znaleźd ΔE
0
. Z równania Keplera:
ponieważ ΔE
0
jest bardzo małe więc:
następnie powtarzamy procedurę aż do uzyskania założonej dokładności.
0
0
0
0
0
0
0
E
E
E
;
M
M
M
;
E
sin
e
E
M
0
0
0
0
0
0
E
E
sin
e
E
E
M
M
0
0
0
0
E
cos
E
e
E
M
0
0
0
E
cos
e
1
M
E
k
k
k
1
k
E
cos
e
1
M
E
E
Położenie punktu na orbicie
Rozwiązanie równania Keplera
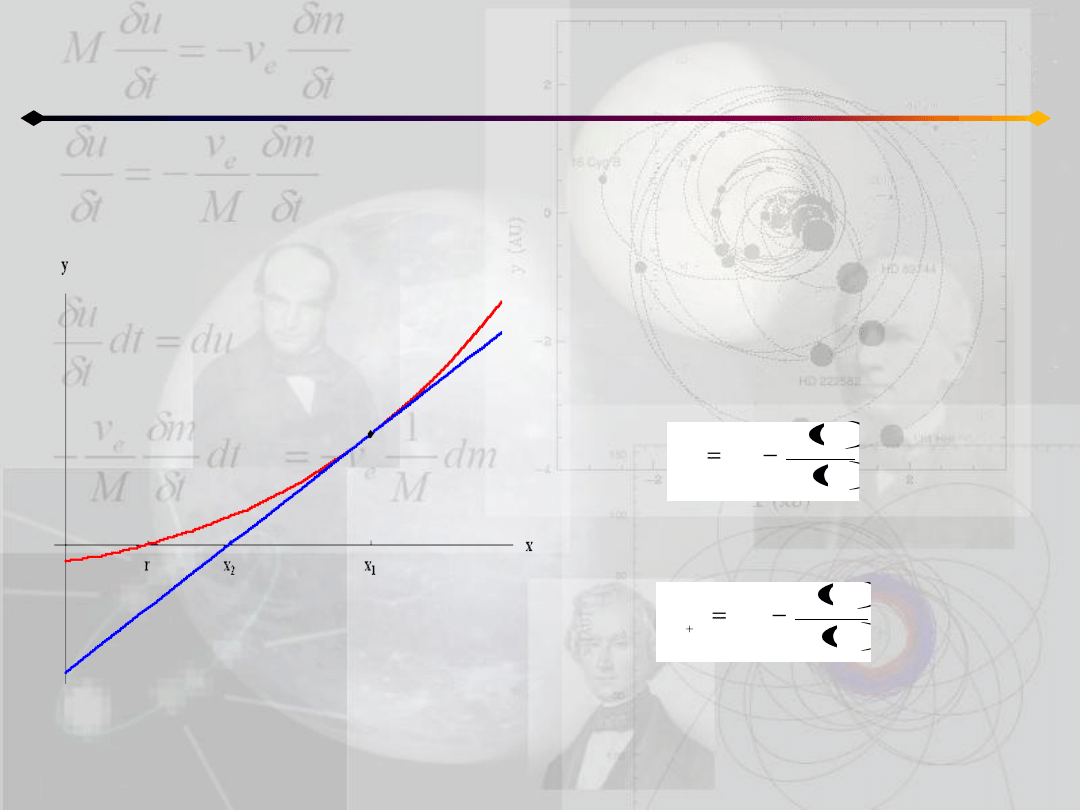
(metoda Newtona-Raphsona)
Metoda N-R pozwala znaleźd miejsce zerowe
funkcji f(x).
Liczymy jej pochodną w punkcie x
1
, przy
czym f’(x
1
)≠0.
znajdujemy x
2
:
wzór ogólny:
pozwala wyznaczyd miejsce zerowe z zadaną
dokładnością
1
1
1
2
x
'
f
x
f
x
x
n
n
n
1
n
x
'
f
x
f
x
x
Położenie punktu na orbicie
Rozwiązanie równania Keplera
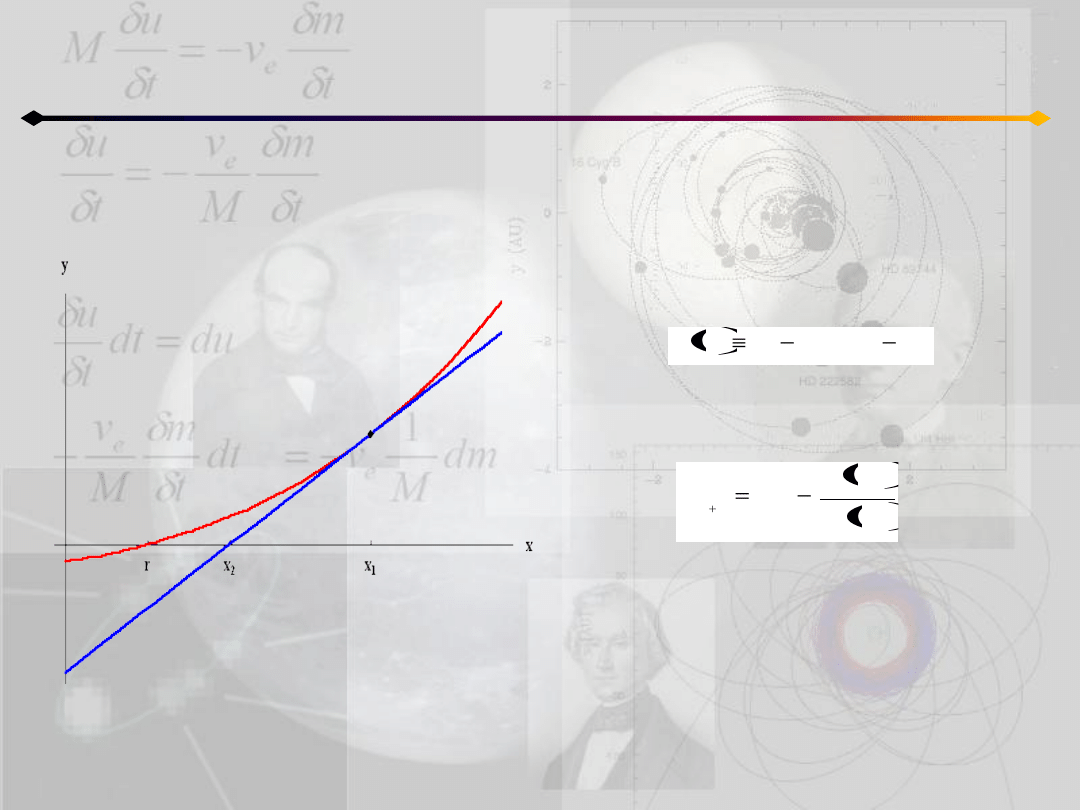
(metoda Newtona-Raphsona)
Metoda N-R dla równania Keplera:
daje wzór ogólny postaci:
M
E
sin
e
E
E
F
n
n
n
1
n
E
'
f
E
f
E
E
Położenie punktu na orbicie
h<0
O
Do wyznaczenia położenia ciała na orbicie
eliptycznej otrzymaliśmy następujący zestaw
równao:
E
cos
e
1
a
r
2
E
tg
e
1
e
1
2
tg
M
E
sin
e
E
a
n
2
3
Położenie punktu na orbicie
h<0
O
Współrzędne prostokątne i składowe
prędkości wyznaczamy z (dwiczenia):
Wródmy do przypadku h>0 (ruch po hiperboli)
r
E
cos
e
1
n
a
y
r
E
sin
n
a
x
E
sin
e
1
a
sin
r
y
e
E
cos
a
cos
r
x
2
2
2
2
Położenie punktu na orbicie
h<0
S’
S
a
a
P
P’
r
O
Π
Q
υ
H
E
0
dE
1
E
cosh
e
a
T
t
a
E
E
sinh
e
T
t
a
3
całkujemy
oznaczamy:
3
a
n
E
E
sinh
e
T
t
n
E jest hiperboliczną anomalią mimośrodową
Położenie punktu na orbicie
h<0
S’
S
a
a
P
P’
r
O
Π
Q
υ
H
Porównując równania:
otrzymujemy:
a następnie:
1
E
cosh
e
a
r
cos
e
1
1
e
a
r
2
1
E
cosh
e
E
cosh
e
cos
1
E
cosh
e
E
sinh
1
e
sin
2
2
E
tgh
1
e
1
e
2
tg
Położenie punktu na orbicie
h<0
S’
S
a
a
P
P’
r
O
Π
Q
υ
H
Uzyskane równania można wyrazid za
pomocą funkcji trygonometrycznych
wprowadzając nową zmienną H:
wtedy:
Z definicji funkcji hiperbolicznych:
można pokazad, że:
H
sec
E
cosh
;
H
tg
E
sinh
2
H
tg
2
E
tgh
4
2
H
tg
E
exp
E
exp
E
exp
E
cosh
2
E
exp
E
exp
E
sinh
2
Wyszukiwarka
Podobne podstrony:
Mechanika nieba wykład 9
Mechanika nieba wykład 14
Mechanika nieba wykład 7
Mechanika nieba wykład 4
Mechanika nieba wykład 5
Mechanika nieba wykład 10
Mechanika nieba wykład 11
Mechanika nieba wykład 13
Mechanika nieba wykład 2
Mechanika nieba wykład 12
Mechanika nieba wykład 3
Mechanika nieba wykład 8
Mechanika nieba wykład 9
Mechanika nieba wykład 14
więcej podobnych podstron