
BADANIE WYBRANYCH WŁASNO
ŚCI MATERIAŁÓW
MAGNETYCZNYCH
1
Cel i zakres
ćwiczenia
Celem ćwiczenia jest poznanie wybranych własności materiałów magnetycznych,
zapoznanie się z metodami pomiaru i wyznaczania wybranych wielkości magnetycznych
materiałów magnetycznie miękkich, w tym w sposób praktyczny z metodą oscyloskopową.
2
Wst
ęp teoretyczny
2.1
Rodzaje materiałów magnetycznych
Materiały
wykorzystywane
w
technice
cechują
się
różnymi
własnościami
magnetycznymi. Znajomość tych własności pozwala w właściwy sposób określić
przeznaczenie danego materiału w technice. Materiały magnetyczne dzielą się na trzy
zasadnicze grupy:
−
diamagnetyki,
−
paramagnetyki,
−
ferromagnetyki.
Diamagnetyk to materiał, którego przenikalność magnetyczna względna jest bliska zeru.
Stanowi on rodzaj izolatora magnetycznego, gdyż energia pola magnetycznego w nim
zgromadzona jest niewielka. Przykładami takiego materiału są nadprzewodniki lub próżnia.
Paramagnetyk to materiał, który nie wykazuje żadnych cech szczególnych w
zewnętrznym polu magnetycznym. Pole magnetyczne wnikając do wnętrza paramagnetyku
nie ulega ani wzmocnieniu, ani wytłumieniu. Sam materiał wykazuje niewielką przenikalność
magnetyczną (µ
r
≈ 1) Przykładem takiego materiału jest powietrze.
Ferromagnetyk to materiał, który charakteryzuje się dużą wartością przenikalności
magnetycznej względnej (µ
r
>> 1). Ferromagnetyki gromadzą pole magnetyczne, które wnika
do ich wnętrza. Jedną z przyczyn jest istnienie w tych materiałach nieskompensowanych
spinowych momentów magnetycznych. Są one charakterystyczne dla pierwiastków, które
posiadają niepełne powłoki walencyjne. Im mniej zapełniona jest powłoka walencyjna, tym
większy jest wytwarzany moment magnetyczny. Przykładami takich pierwiastków są Fe, Ni,
Co, które znajdują się w grupie d układu okresowego pierwiastków. Posiadają one niezerowy
spinowy moment magnetyczny, który powoduje istnienie niezerowego wypadkowego
momentu magnetycznego. Źródłem momentu magnetycznego w atomie są wzajemne
oddziaływania spinowych momentów magnetycznych elektronów, spinowego momentu
magnetycznego jego jądra oraz orbitalnych momentów magnetycznych wywołanych ruchem
elektronów po orbitalach. Wypadowy moment magnetyczny tych trzech składników stanowi
tzw. dipol magnetyczny. Źródłem niezerowego momentu magnetycznego mogą być również
elektrony swobodne, wirujące wokół własnej osi. Inną przyczyną zjawiska jest występowanie
sił wymiany, czyli sił oddziaływania spinowych momentów magnetycznych dążących do
uporządkowania orientacji spinów w jednym kierunku.
Obecność struktury krystalicznej w ferromagnetyku powoduje jego anizotropowość
względem pola magnetycznego. Przykładowo w krysztale żelaza, tworzącego sieć regularną
przestrzennie centrowaną, można wyróżnić trzy kierunki magnesowania. Kryształy mają
pewien kierunek preferowany, w którym magnesowanie zachodzi najłatwiej. Jest to tzw.
kierunek łatwego magnesowania. Stwierdzono, że w przypadku kryształu wolnego od
odkształceń i znajdującego się poza polem magnetycznym wektor namagnesowania dąży do

przyjęcia kierunku łatwego namagnesowania, gdyż zapewnia to najniższą energię
wewnętrzną.
W technice rzadko występuje jednolita struktura krystaliczna (monokryształ). Często
występuje struktura polikrystaliczna, w której materiał złożony jest z kilku obszarów
monokrystalicznych. W obszarach tych, pod wpływem sił wymiany, zachodzi zgodna
orientacja spinowych momentów magnetycznych. Tworzą się wówczas obszary nazywane
domenami magnetycznymi. Energia potrzebna na zmianę orientacji tych domen podczas
przemagnesowania jest główną przyczyną strat w urządzeniach wykorzystujących rdzenie z
materiałów ferromagnetycznych.
Podobnie jak pojedyncze kryształy, struktura domenowa materiału również powoduje
występowanie anizotropii magnetycznej całego materiału. W przemyśle uzyskuje się to
poprzez odpowiednią obróbkę cieplną, magnetyczną i mechaniczną (m. in. walcowanie na
zimno, walcowanie na gorąco, wyżarzanie materiału w polu magnetycznym, stosowanie
ultradźwięków czy kontrolowanie procesu studzenia materiału). Ostatnie dwa z
wymienionych procesów wpływają na wielkość kryształów. Pozostałe wpływają na strukturę
domenową i orientację kryształów.
W technice stosuje się materiały o różnym rozkładzie domen zależnie od wymagań
konstrukcyjnych danego urządzenia. W transformatorach stosowana jest orientowana blacha
elektrotechniczna, wykazująca silną anizotropię. Wynika to z faktu, iż pole magnetyczne w
rdzeniu transformatora jest ukierunkowane wzdłuż kolumn i jarzm. Dla maszyn wirujących
stosuje się materiały o możliwie dużej izotropii, ze względu na pracę w wirującym polu
magnetycznym.
Oprócz przedstawionego na wstępie podziału materiałów magnetycznych, w obrębie
samych ferromagnetyków można dokonać kolejnego podziału na tzw. materiały
ferromagnetyczne miękkie i twarde.
Materiały magnetycznie miękkie stosowane są głównie w maszynach prądu
przemiennego jako rdzenie magnetowodów. Specyfika pracy tych urządzeń wymaga
cyklicznych zmian kierunku pola magnetycznego. Częste przemagnesowywanie jest źródłem
strat, których jednym z elementów składowych są straty histerezowe. Materiały magnetycznie
miękkie cechują się wąską pętlą histerezy (patrz pkt 2.2), z czym wiążą się również małe
straty na przemagnesowywanie. Istnieje kilka rodzajów materiałów magnetycznie miękkich
różniących się wewnętrzną strukturą krystaliczną: materiały krystaliczne, amorficzne oraz
nanokrystaliczne.
Materiały o strukturze krystalicznej stosuje się w rozwiązaniach technicznych, gdzie
materiał poddawany jest dużym naprężeniom mechanicznym w czasie pracy (drgania,
momenty obciążenia), gdyż struktura krystaliczna zwiększa wytrzymałość mechaniczną
materiału. Dodatkową zaletą jest duża wartość indukcji nasycenia (ok. 2 T). Materiały te są
jednak bardzo wrażliwe na zanieczyszczenia. Nawet niewielka ilość domieszek i
zanieczyszczeń powoduje zakłócenie struktury krystalicznej i w znaczącym stopniu pogarsza
jego właściwości magnetyczne. Do zanieczyszczeń zalicza się przede wszystkim niemetale:
C, P, H, N, S, O. Niektóre domieszki powodują uzyskanie pewnych cech wymaganych w
określonych rozwiązaniach. Do dodatków tych zalicza się przede wszystkim krzem.
Obecność Si zwiększa rezystywność materiału, co przyczynia się do zmniejszenia strat
pochodzących od prądów wirowych. Wtrącenie w strukturę krystaliczną atomów krzemu
zmniejsza również wartość natężenia koercji, co korzystnie wpływa na zmniejszenie strat
histerezowych. Kolejnymi zaletami jest zmniejszenie stałej magnetostrykcji liniowej oraz
ograniczenie szybkości starzenia się blachy elektrotechnicznej. Istnieją również wady
stosowania krzemu. Zwiększona twardość i zmniejszona plastyczność powodują istotne
trudności w obróbce.
Materiały amorficzne, zwane również szkłami metalicznymi uzyskiwane są poprzez
gwałtowne schłodzenie z prędkością 10
5
– 10
6
K/s ciekłego stopu metalu przejściowego (np.

Fe, Ni, Co) oraz tzw. metaloidu (np. B, C, Si). W ten sposób uniemożliwia się wytworzenie
dużych obszarów zawierających sieć krystaliczną. Uporządkowanie krystaliczne występuje
jedynie w obrębie kilku atomów. Uzyskany materiał wykazuje w przybliżeniu pięciokrotnie
mniejszą stratność niż identyczny materiał o strukturze polikrystalicznej oraz posiada bardzo
wąską pętlę histerezy. Zaletą tego materiału jest duża łatwość magnesowania i małe straty
histerezowe oraz niewielka grubość, pozwalająca obniżyć straty wirowoprądowe. Ich wadą
jest niższa, niż dla materiałów polikrystalicznych, wartość indukcji maksymalnej. Brak
struktury krystalicznej osłabia wytrzymałość mechaniczną materiału co skutkuje wysoką
wrażliwością na naprężenia. Dodatkowo powstające w procesie tworzenia naprężenia
wewnętrzne są powodem dużej wartości magnetostrykcji liniowej, będącej źródłem hałasu o
dużym natężeniu. Stanowi to jedną z głównych wad szkieł metalicznych. Kierunek łatwego
magnesowania dla taśm amorficznych zorientowany jest wzdłuż osi taśmy, natomiast
najtrudniejsze magnesowanie zachodzi dla kierunku prostopadłego do jej powierzchni.
Materiały nanokrystaliczne stanowią rozwinięcie technologii taśm amorficznych. Ich
wytwarzanie polega na wytworzeniu taśmy amorficznej, a następnie jej cieplnej i
magnetycznej obróbki. Odpowiedni skład w połączeniu z obróbką szkła metalicznego
pozwala osiągnąć strukturę mikrokrystaliczną, wykazującą jeszcze lepsze własności
magnetyczne od zwykłego szkła metalicznego. Do stopu Fe-Si-B, typowego dla szkieł
metalicznych, dodaje się Cu, Nb lub inne pierwiastki utrudniające tworzenie struktury
krystalicznej. Powoduje to powstanie nadzwyczaj drobnych ziaren krystalicznych o
ś
rednicach rzędu 10
÷
30 nm. Kryształy te zawieszone są w amorficznej matrycy Fe-Nb-B.
Istotną zaletą takiego wykonania jest mała wartość anizotropii, umożliwiająca wykorzystanie
tych materiałów do produkcji rdzeni zwijanych toroidalnych lub owalnych ciętych. Wartość
przenikalności magnetycznej względnej uzyskuje się poprzez odpowiednie zorientowanie
pola magnetycznego względem próbki w procesie obróbki termomagnetycznej. Ze względu
na niewielki rozmiar ziaren wartość natężenia koercji tych materiałów jest znacznie mniejsza
niż
w
przypadku
materiałów
o
strukturze
krystalicznej.
Stanowi
to
jedną
z największych zalet materiałów nanokrystalicznych.
Magnetyki twarde to grupa ferromagnetyków, których cechą charakterystyczną jest
bardzo szeroka pętla histerezy (patrz pkt. 2.2) oraz duża wartość natężenia koercji. Są one
wykorzystywane w technice jako magnesy trwałe, których istotną cechą jest utrzymanie pola
magnetycznego po zaniku zewnętrznego pola wymuszającego. Pierwotnie magnesy
wytwarzano ze stopu Co-Ni, Co-Fe, bądź bardzo twardych ceramicznych tlenków metali
zwanych ferrytami. Ich zaletą jest duża oporność wewnętrzna (10
7
Ω). Pozwala to na znaczne
ograniczenie prądów wirowych indukowanych wewnątrz materiału. Badania nad tą grupą
materiałów magnetycznych ukierunkowane są między innymi na zwiększenie wartości
indukcji remanentu, a więc wartości indukcji jaką posiada materiał po zaniknięciu
zewnętrznego pola wymuszającego, oraz na zwiększenie odporności materiału na
odmagnesowywanie pod wpływem obcych pól magnetycznych poprzez poprawę wartości
natężenia koercji.
2.2
Magnesowanie ferromagnetyka
Magnesowanie ferromagnetyka jest zjawiskiem polegającym na reorientacji momentów
magnetycznych i zmianie struktury domenowej materiału pod wpływem zewnętrznego pola
magnetycznego. Pod wpływem zewnętrznego pola magnetycznego następuje obrót
momentów magnetycznych zgodnie z kierunkiem zewnętrznego pola magnetycznego.
Jeżeli wartość natężenia zewnętrznego pola magnetycznego wzrasta, a indukcja materiału
poddawanego magnesowaniu na początku tego procesu była równa zero, to rejestrując zmiany
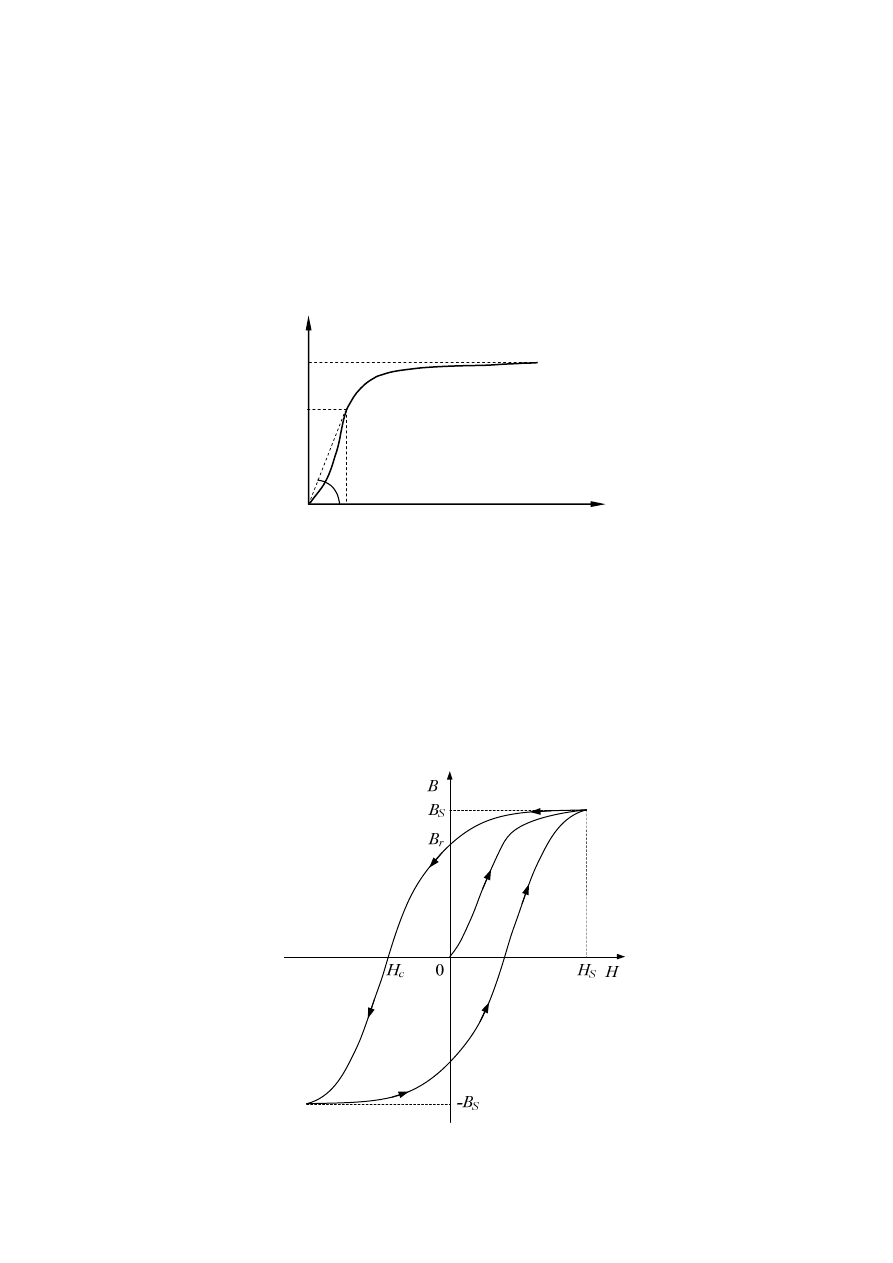
natężenia pola magnetycznego i wywołanej nim indukcji otrzymuje się tzw. pierwotną krzywą
magnesowania. Przykład takiej krzywej podany jest na rys. 2.1.
Zwiększanie zewnętrznego pola magnetycznego H powoduje, że coraz więcej dipoli
magnetycznych w próbce ferromagnetyka jest uporządkowanych i skierowanych zgodnie z
wektorem H. Przy natężeniu, przy którym wszystkie dipole magnetyczne są skierowane
zgodnie z jego wektorem, indukcja osiąga wartość nasycenia B
S
.
Na rys. 2.1. przedstawiono również sposób wyznaczania (statycznej) bezwzględnej
przenikalności magnetycznej µ. Oprócz tak zdefiniowanej przenikalności wyróżnia się m.in.
przenikalność dynamiczną (różniczkową) i różnicową
B
H
1
B
S
B
1
H
α
tg
α
= µ
Rys. 2.1. Pierwotna krzywa magnesowania
Jeżeli po namagnesowaniu próbki ferromagnetyka nastąpi zmniejszenie wartości H,
wartość indukcji B(H) nie będzie się zmieniać zgodnie z pierwotną krzywą magnesowania.
Wartość indukcji zmniejsza się wolniej i przy H = 0 pozostaje niezerowa wartość indukcji
magnetycznej B
r
> 0 (indukcja remanentu). Żeby ją zlikwidować należy wytworzyć
przeciwnie skierowane zewnętrzne pole magnetyczne o natężeniu H
c
(natężenie koercji). Gdy
natężenie pola magnetycznego (przeciwnie skierowanego) będzie nadal zwiększane, indukcja
osiągnie wartość –B
S
. Krzywa między B
S
i -B
S
tworzy górną połowę symetrycznej względem
początku układu współrzędnych pętli zwanej pętlą histerezy. Kształt pętli histerezy
przedstawiono na rys. 2.2.
Rys. 2.2. Pętla histerezy magnetycznej
Na obrót dipoli magnetycznych od kierunków łatwego magnesowania, w których są one
spontanicznie uporządkowane w domenach do kierunku wektora H potrzebna jest określona
energia. Przy cyklicznych zmianach kierunku wektora H energia ta jest tracona bezpowrotnie
przy każdym obiegu pętli histerezy, zamieniając się na ciepło. Powoduje to powstawanie tzw.
strat histerezowych proporcjonalnych do powierzchni pętli histerezy.
2.3
Metody pomiaru wybranych wielko
ści magnetycznych
Najczęściej badanymi wielkościami magnetycznymi magnetyków są: indukcja nasycenia,
wartość szczytowa natężenia pola magnetycznego oraz stratność magnetyczna.
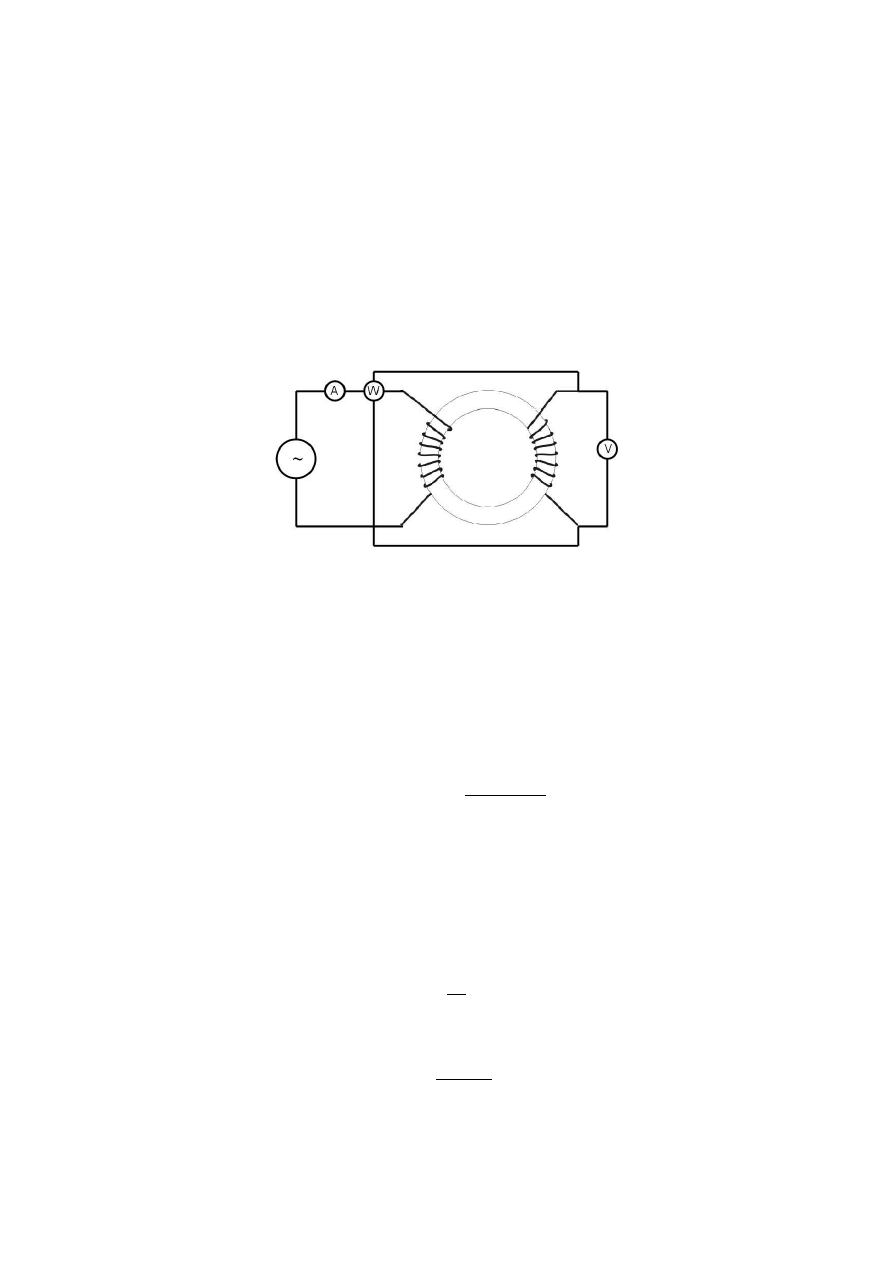
Metoda techniczna umożliwia pomiary tych wielkości za pomocą amperomierza,
woltomierza oraz watomierza (rys. 2.3).
Rys. 2.3. Schemat układu do badania własności magnetycznych metodą techniczną
W metodzie tej na toroidalną próbkę badanego materiału nawija się dwa uzwojenia:
magnesujące oraz pomiarowe. W obwód uzwojenia magnesującego włącza się amperomierz
i cewkę prądową watomierza, natomiast w obwód uzwojenia pomiarowego woltomierz
magnetoelektryczny oraz cewkę napięciową watomierza. Podłączenie watomierza w ten
sposób pozwala na pomiar strat całkowitych w badanej próbce. Zastosowany watomierz
powinien cechować się niewielkim znamionowym współczynnikiem mocy cosφ
N
< 0,3.
Pozwoli to na uzyskanie dokładnych pomiarów przy niskich współczynnikach mocy.
Moc strat całkowitych wydzielana w materiale:
P
c
=
P
−
P
w
=
P
−
1,11 U
2śr
2
R
i
,
(2.1)
gdzie:
P
– wskazanie watomierza,
P
w
– moc strat własnych watomierza,
R
i
– rezystancja cewki prądowej watomierza,
U
2śr
– wartość średnia napięcia na zaciskach uzwojenia pomiarowego.
Znając masę próbki m można wyznaczyć jej stratność:
p
=
P
c
m
,
(2.2)
Woltomierz magnetoelektryczny umożliwia wyznaczenie indukcji nasycenia z zależności:
B
s
=
U
2śr
4 f z
2
S ,
(2.3)
gdzie:
U
2śr
– wartość średnia napięcia indukowanego na zaciskach uzwojenia wtórnego,
f
– częstotliwość prądu magnesującego,
z
2
– liczba zwojów uzwojenia wtórnego,
S
– poprzeczny przekrój czynny rdzenia.
Pomiar wartości szczytowej prądu magnesowania umożliwia wyznaczenie wartości
maksymalnej natężenia pola magnetycznego z zależności:
1
z
I
Hl
m
=
,
(2.4)
gdzie:
H
– natężenie pola magnetycznego,
l
– długość drogi magnetycznej,
I
m
– prąd magnesujący,
z
1
– ilość zwojów uzwojenia magnesującego.
Metoda oscyloskopowa stanowi rozwinięcie metody technicznej. Pozwala ona nie tylko
na pomiar parametrów magnetycznych materiału, ale także na graficzne zobrazowanie
kształtu pętli histerezy w badanej próbce, co umożliwia szybkie i łatwe porównywanie ze
sobą próbek różnych materiałów magnetycznych. Przy pomocy metody oscyloskopowej
możliwe jest również wyznaczenie parametrów charakterystycznych próbki: B
r
oraz H
c
. Pętla
histerezy powstaje w układzie współrzędnych (B, H). Ponieważ oscyloskop wymaga
napięciowego sygnału wejściowego, konieczne jest uzyskanie dwóch sygnałów
napięciowych, proporcjonalnych do natężenia pola magnetycznego oraz indukcji
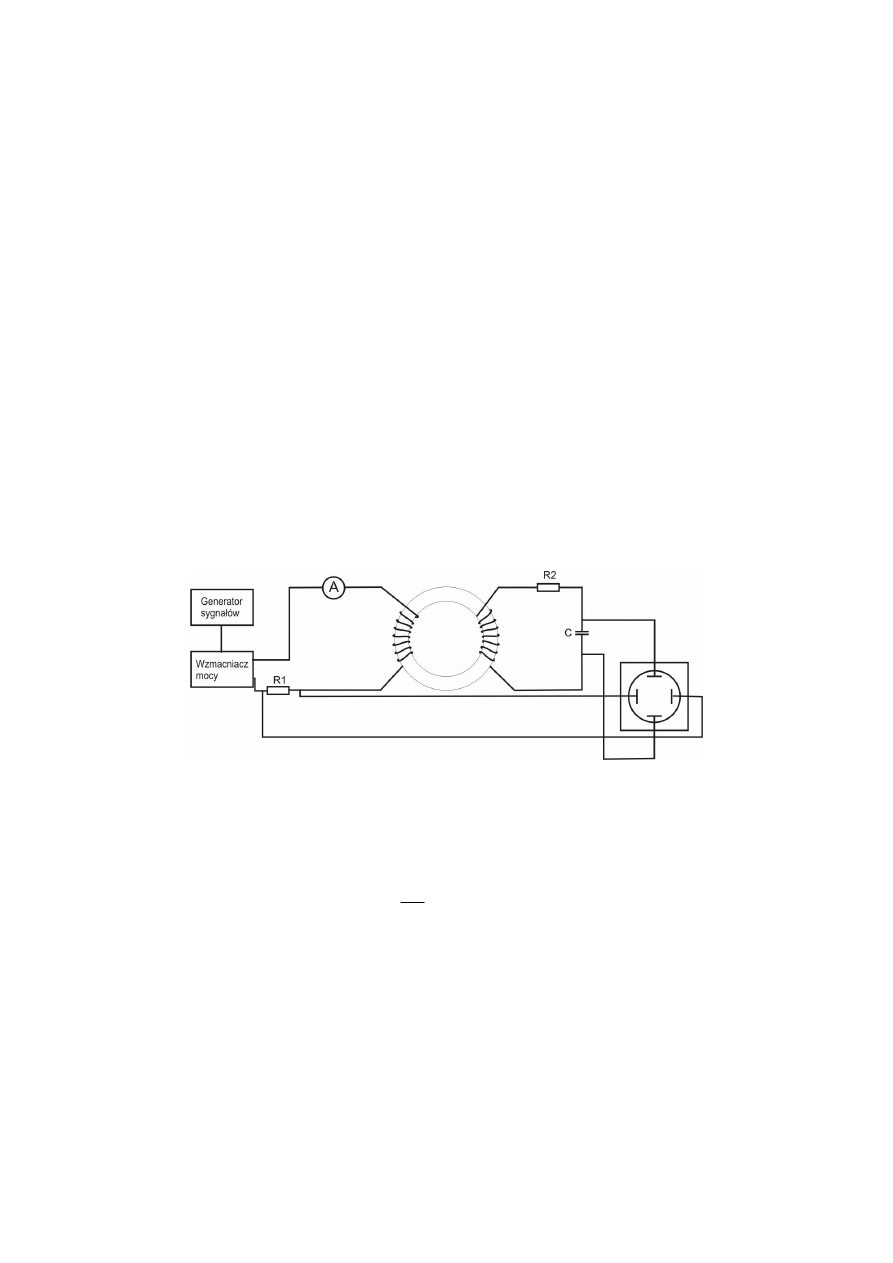
magnetycznej. Na rys. 2.4. przedstawiono schemat układu pomiarowego do badania stratności
magnetycznej metodą oscyloskopową.
Rys. 2.4. Schemat układu pomiarowego do badania strat histerezowych metodą oscyloskopową
Zgodnie z prawem Ampere'a (2.4) prąd magnesujący powoduje spadek napięcia u
H
na
rezystancji R
1
. Wartości chwilowe tego napięcia są wprost proporcjonalne do wartości
chwilowych natężenia pola magnetycznego według zależności:
)
(
)
(
)
(
1
1
t
u
k
t
u
lR
z
t
H
H
H
H
=
=
,
(2.5)
gdzie:
H(t) – natężenie pola magnetycznego,
u
H
(t) – napięcie na rezystorze R
1
,
z
1
– ilość zwojów uzwojenia magnesującego,
l
– średnia długość drogi magnetycznej.
W celu uzyskania odpowiednio wysokiego poziomu sygnału napięciowego, możliwego
do zarejestrowania przez oscyloskop, konieczny jest taki dobór wartości prądu
magnesującego, aby wywołany spadek napięcia mieścił się w zakresie pomiarowym
oscyloskopu. Należy jednak pamiętać, że zwiększanie tego poziomu nie może odbywać się za
pomocą zwiększania wartości rezystora bocznikującego R
1
, gdyż zbyt duża jego wartość
może spowodować przesunięcia fazowe między sygnałami rejestrowanymi przez oscyloskop
po stronie uzwojenia magnesującego i pomiarowego. Z tego też względu uzwojenie
magnesujące powinno mieć możliwie małą ilość zwojów i możliwie duży przekrój.
Kolejnym ograniczeniem jest moc znamionowa rezystora R
1
. Powoduje to ograniczenie
wartości prądu magnesującego.
Korzystając z prawa indukcji Faraday'a otrzymuje się następujące równanie, słuszne
tylko dla przebiegów sinusoidalnych:
SB
fz
U
2
2
44
,
4
=
,
(2.6)
gdzie:
U
2
– wartość skuteczna napięcia na zaciskach uzwojenia wtórnego,
f
– częstotliwość napięcia zasilającego,
z
2
– liczba zwojów uzwojenia wtórnego,
S
– przekrój poprzeczny rdzenia,
B
– indukcja magnetyczna.
Wartość maksymalną indukcji można wyznaczyć na podstawie wartości skutecznej
napięcia indukowanego na zaciskach uzwojenia pomiarowego. By uzyskać prawidłowy
kształt pętli histerezy na ekranie oscyloskopu, wartość chwilową tego napięcia należy
scałkować. Służy do tego układ RC włączony równolegle do uzwojenia pomiarowego. Składa
się on z rezystora R
2
oraz kondensatora C. Napięcie na kondensatorze opisuje równanie:
dt
t
i
C
t
u
C
∫
=
)
(
1
)
(
,
(2.7)
gdzie:
C
– pojemność kondensatora,
i(t) – wartość chwilowa prądu płynącego przez kondensator.
Przy zachowaniu odpowiednio dużej stałej czasowej układu:R
2
C >> T, gdzie T oznacza
okres sygnału wejściowego filtra RC, można zapisać:
dt
dt
t
SdB
z
CR
dt
R
e
C
dt
t
i
C
t
u
C
∫
∫
∫
=
=
=
)
(
1
1
)
(
1
)
(
2
2
2
2
2
,
(2.8)
gdzie:
z
2
– ilość zwojów uzwojenia wtórnego,
S
– przekrój poprzeczni próbki.
Całkując i przekształcając odpowiednio równanie (2.8) otrzymuje się:
)
(
)
(
)
(
2
2
t
u
k
t
u
S
z
C
R
t
B
C
B
C
=
=
.
(2.9)
Z zależności (2.9) wynika, że wartość chwilowa indukcji magnetycznej jest wprost
proporcjonalna do wartości chwilowej napięcia na wyjściu układu RC.
W celu zminimalizowania spadków napięcia w obwodzie pomiarowym konieczne jest
obciążenie go możliwie wysoką impedancją. Dlatego też uzwojenie pomiarowe powinno
mieć możliwie dużą ilość zwojów oraz możliwie mały przekrój. Kolejnym sposobem na
zwiększenie impedancji obciążenia jest zastosowanie rezystora o dużej rezystancji w
obwodzie układu RC. Napięcie na kondensatorze stanowi sygnał napięciowy podawany na oś
odchylania pionowego.

3
Przebieg
ćwiczenia
Badaną próbkę umieszcza się na stanowisku i podłącza zgodnie ze schematem
przedstawionym na rys. 2.4. Zasilanie układu odbywa się za pośrednictwem generatora
funkcyjnego oraz wzmacniacza mocy. Sygnałem ze wzmacniacza zasilane jest uzwojenie
magnesujące, powodując wytworzenie strumienia magnetycznego wewnątrz badanej próbki
oraz wywołując spadek napięcia na rezystorze bocznikującym R
1
. Sygnał napięciowy z
bocznika R
1
podawany jest na układ odchylania poziomego oscyloskopu. Strumień
wytworzony w rdzeniu indukuje napięcie na zaciskach uzwojenia pomiarowego, które ulega
następnie scałkowaniu w układzie RC.
Po umieszczeniu próbki należy sprawdzić poprawność połączeń układu. W szczególności
zwrócić uwagę na prawidłowe podłączenie próbki oraz czy potencjometr wzmacniacza jest
ustawiony w pozycji minimum.
Sterując wartością skuteczną prądu magnesowania (maksymalnie 1A) zmienia się stopień
nasycenia rdzenia magnetycznego. To z kolei powoduje zmianę kształtu pętli histerezy i jej
parametrów charakterystycznych.
Po zamontowaniu próbki i sprawdzeniu układu pomiarowego należy:
•
Ustawić na generatorze sygnał sinusoidalnie zmienny o częstotliwości 50 Hz. Nie
należy regulować amplitudy na generatorze, gdyż grozi to uszkodzeniem
wzmacniacza! Zwiększać wartość prądu wymuszenia tak, by ująć oba „kolana”
charakterystyki (zagęścić pomiary w razie potrzeby). Należy odczytywać cztery
wartości:
−
liczbę działek odpowiadającą indukcji remanentu Y
R
,
−
liczbę działek odpowiadającą indukcji nasycenia Y
S
,
−
liczbę działek odpowiadającą natężeniu koercji X
c
,
−
liczbę działek odpowiadającą natężeniu maksymalnemu X
S
.
•
Pomiary powtórzyć dla częstotliwości 75 Hz i 100 Hz.
Aby określić wartości B i H dla badanej próbki w zadanych warunkach magnesowania
korzysta się z odczytanej liczby działek i wzorów:
H
=
k
X
k
H
X
,
(3.1)
B
=
k
Y
k
B
Y
,
(3.2)
gdzie:
k
X
– wzmocnienie dla odchylania w osi X,
k
Y
– wzmocnienie dla odchylania w osi Y.
Współczynniki k
H
i k
B
określa się korzystając z zależności (2.5) i (2.9).
Wartość prądu magnesowania należy regulować (kontrolując, by nie przekroczył wartości
skutecznej 1 A) tak, by można było łatwo odczytywać odchylenie na podziałkach
oscyloskopu. Pomiary przeprowadza się początkowo względem indukcji magnetycznej, a
następnie, po osiągnięciu stanu bliskiego nasyceniu (kolano charakterystyki), względem
zmian natężenia pola magnetycznego. Na kolanach charakterystyki należy zagęścić pomiary.
Pozwoli to na uzyskanie dokładniejszych charakterystyk. Przykładową tabelę pomiarową
zamieszczono poniżej:
Tabela 3.1
Wyniki pomiarów oraz wyznaczone na ich podstawie wielkości dla częstotliwości ….. Hz
Częstotliwość:
Badany materiał:
k
H
k
B
k
X
k
Y
Y
S
X
S
Y
R
X
C
B
S
H
S
B
R
H
C
µ
r
V/div
V/div
div
div
div
div
T
A/m
T
A/m
-
Dysponując wartościami natężenia koercji oraz indukcji remanentu obliczonymi ze
wzorów (3.1) oraz (3.2), można oszacować straty histerezowe korzystając z przybliżenia pętli
histerezy prostokątem. Wówczas straty histerezowe wyrażone są wzorem:
p
=
u
Br
i
Hc
m
=
B
r
H
c
m
S l
R
2
C ,
(3.3)
gdzie:
B
r
– wartość indukcji remanentu wyznaczona z pomiaru odchylenia osi pionowej (T),
H
c
– wartość natężenia koercji wyznaczona z pomiaru odchylenia osi poziomej (A/m),
m – masa badanej próbki (kg),
S – przekrój poprzeczny rdzenia próbki (m
2
),
l – średnia długość obwodu magnetycznego badanej próbki (m),
R
2
– rezystancja układu RC (Ω),
C – pojemność układu RC (F).
Dane techniczne blachy elektrotechnicznej ET-3:
Skład chemiczny: Fe
97
Si
3
Indukcja nasycenia: 2,1 T
Częstotliwość znamionowa: 50 Hz
Ś
rednica wewnętrzna: 35 mm
Ś
rednica zewnętrzna: 65 mm
Wysokość: 30 mm
Przekrój poprzeczny: 450 mm
2
Ś
rednia droga strumienia: 157 mm
Masa próbki (rdzeń): 500 g
Stratność (dla 1,7 T, 50 Hz): 1,08 W/kg
Liczba zwojów uzwojenia magnesującego: 11
Liczba zwojów uzwojenia pomiarowego: 30
Pojemność C = 1 µF
Wyszukiwarka
Podobne podstrony:
MAGNETOMETRIA id 276774 Nieznany
MagnetLoop Help id 276752 Nieznany
MagnetLoop Aide id 276751 Nieznany
MagnetLoop Hilfe id 276753 Nieznany
Abolicja podatkowa id 50334 Nieznany (2)
4 LIDER MENEDZER id 37733 Nieznany (2)
katechezy MB id 233498 Nieznany
metro sciaga id 296943 Nieznany
perf id 354744 Nieznany
interbase id 92028 Nieznany
Mbaku id 289860 Nieznany
Probiotyki antybiotyki id 66316 Nieznany
miedziowanie cz 2 id 113259 Nieznany
LTC1729 id 273494 Nieznany
D11B7AOver0400 id 130434 Nieznany
analiza ryzyka bio id 61320 Nieznany
pedagogika ogolna id 353595 Nieznany
więcej podobnych podstron