
Systemy operacyjne
– notatki do wykładu
12
4. Koordynacja procesów
4.1 Sekcje krytyczne
interpretacja przetwarzania współbieżnego dla pojedynczego CPU: proces rozpoczyna się
przed zakończeniem poprzedniego
możliwy konflikt przy operacjach na danych dzielonych (np. nawet instrukcja x:=x=1 to 3
instrukcje (mov AX,x; inc AX; mov x,AX) procesora...
Wniosek: każdy z procesów ma (może mieć) segment kodu nazywany sekcją krytyczną (SK).
SK procesów podlegają wzajemnemu wykluczaniu się w czasie.
Cechy rozwiązania problemu SK:
-
wzajemne wyłączanie SK
-
ograniczone (skończone) czekanie na wejście do SK
-
postęp: kandydują tylko procesy zgłaszające chęć wejścia do SK
np.(ogólna struktura procesu i przykładowe rozwiązanie):
repeat
while x<>0 do nic
(sekcja wejściowa)
<SK> (SK)
x:=1
(sekcja wyjściowa)
<reszta kodu procesu>
until false
(narzucone naprzemienne (czyli nie spełniające warunku postępu) wykonanie SK
dla 2(może być więcej) procesów)
Poprawne rozwiązanie dla 2 procesów:
var flaga: array[o..1] of Boolean
numer: 0..1
repeat
flaga[i]:=TRUE
(chcę wejść)
numer:=j
(założenie, że drugi chce wejść)
while (flaga[j] AND numer:=j)do nic
<SK>
flaga[i]:=FALSE
<reszta kodu procesu>
until false
(bez zmiennej numer możliwe byłoby ustawienie obu flag przez procesy w
dwóch kolejnych instrukcjach procesora (po pechowym przełączeniu kontekstu) i wieczne ich
zapętlenie...)
4.2 Semafory
Semafor ogólne popularne rozwiązanie problemu SK i synchronizacji
Semafor s to zmienna całkowita dostępna po inicjacji za pomocą tylko 2 operacji:
- czekaj(s):
while s <= 0 do nic; s := s-1;
- sygnalizuj(s):
s := s+1;
Interpretacja s: ilość wolnych zasobów; w tym przypadku zasobem jest SK
Operacje na semaforach są NIEPODZIELNE! Implementacja:
- na pojedynczym CPU
– zablokowanie przerwań na czas operacji
- w systemie wieloprocesorowym instrukcja procesora TEST&SET
Użycie:
s:=1
repeat
czekaj(s)
<SK>
sygnalizuj(s)
<reszta kodu procesu>
until false

Systemy operacyjne
– notatki do wykładu
13
Zastosowanie przy synchronizacji (np. gdy operacja1 musi się wykonać po operacji2):
s:=0
1proces:
op1;
2proces:
czekaj(s);
sygnalizuj(s);
op2;
Wada: s wymaga aktywnego czekania (czas procesora!!!)
-
rozwiązanie: po czekaj(s) proces jest blokowany i umieszczany w kolejce związanej z s
-
pobranie procesu z kolejki następuje po sygnalizuj(s)
-
wtedy semafor to rekord (zmienna całk. + lista procesów)
-
algorytm obsługi kolejki nie ma znaczenia dla procesora
Realizacja niepodzielności:
-
1 procesor: blokada przerwań na czas operacji
-
wiele procesorów: np. pojedyncza instrukcja procesora „test&set”
4.3 Blokady.
Stan blokady: każdy proces w zbiorze procesów czeka na zdarzenie, które może być
spowodowane tylko przez inny procesu z tego samego zbioru (zdarzeniem może być np.
przydział lub zwolnienie zasobu).
np.:
Semafory A i B mają wartość 1:
P0: wait(A); wait(B)
P1: wait(B); wait(A)
Przypadek szczególny: tzw. głodzenie – czekanie w nieskończoność pod semaforem – gdy np.
zastosujemy kolejkę LIFO semafora.
Warunki powstania blokady:
1.
Wzajemne wyłączanie (co najmniej 1 zasób musi być niepodzielny)
2.
Przetrzymywanie i oczekiwanie (proces przetrzymujący co najmniej jeden zasób czeka na
przydział dodatkowych zasobów będących w posiadaniu innych procesów).
3.
Nie ma wywłaszczania z zasobów.
4.
Cykliczne czekanie (istnieje zbiór czekających procesów {P0, P1, Pn }, takich że P 0 czeka na
zasób przetrzymywany przez P1 , P1 czeka na zasób przetrzymywany przez P2 , ..., P n czeka
na zasób przetrzymywany przez P0 .
(4 implikuje 2, więc podane warunki nie są niezależne)
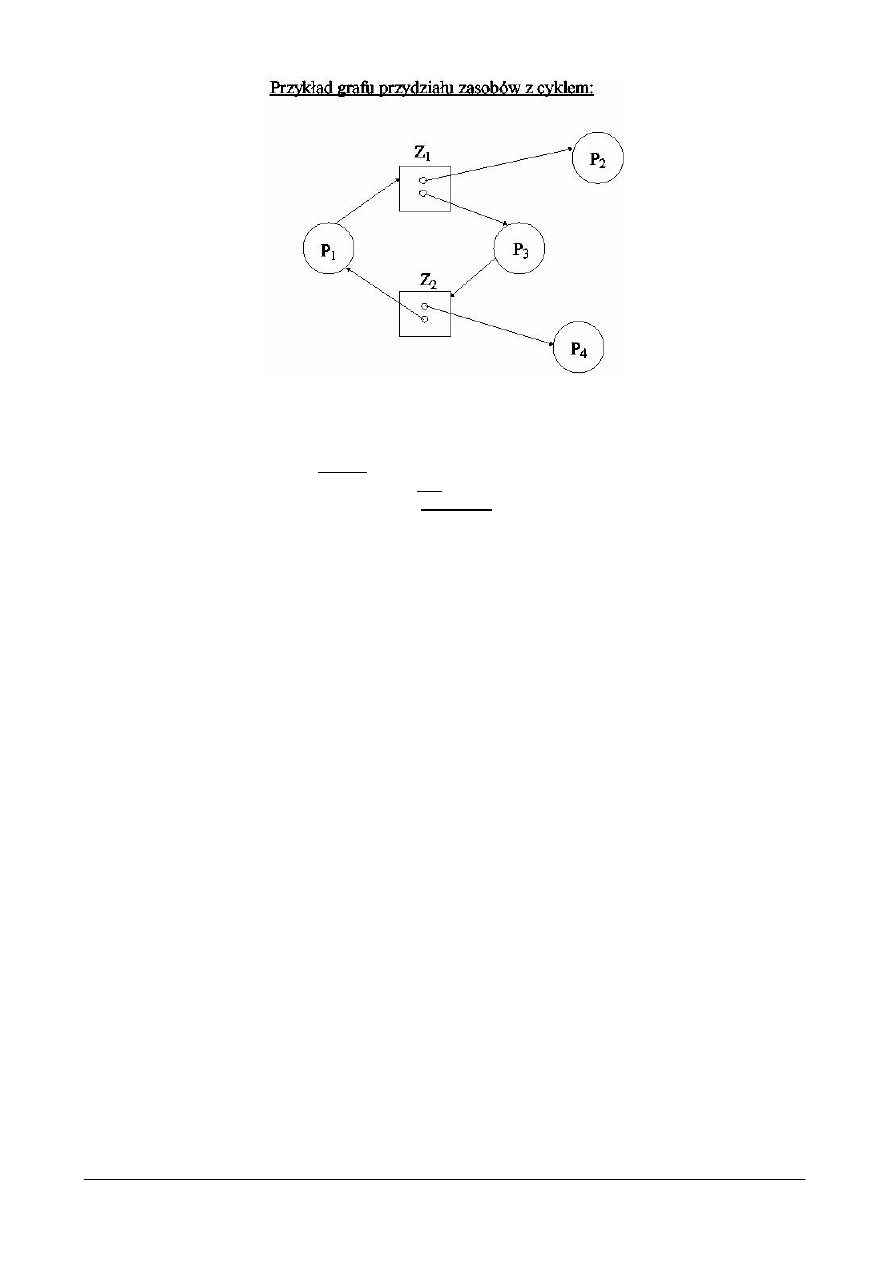
Opis blokady:
-
zbiór procesów P, zasobów Z, „graf przydziału zasobów” – dwudzielny (krawędzie łączą
wierzchołki należące do 2 rozdzielnych zbiorów – w tym przypadku zasobów i procesów) graf
skierowany.
-
krawędzie P
i
Z
j
: krawędź zamówienia
-
krawędzie Z
j
P
i
: krawędź przydziału
Rysunek:
-
proces p
kółko,
-
zasób z prostokąt
-
1 egzemplarz zasobu z
kropka w prostokącie.
-
krawędź przydziału zaczyna się od kropki
Zdarzenia w systemie:
-
zamówienie z przez p : dodajemy krawędź p z
-
realizacja zamówienia : dodajemy krawędź z p, usuwamy p z
-
zwolnienie zasobu : usuwamy krawędź
Systemy operacyjne
– notatki do wykładu
14
Blokada:
-
jeżeli w grafie nie ma cyklu: nie ma blokady.
-
jeżeli jest cykl a zasoby są pojedyncze to jest blokada
-
jeżlei jest cykl a zasoby są wielokrotne, to może być blokada
Postępowanie z blokadami:
-
zapewnić że nigdy ich nie będzie (odp. protokół przydziału zasobów)
-
pozwalać na wejście w blokadę i potem ją usuwać
-
zign
orować i założyć, że nie wystąpią (np. UNIX i większość popularnych s.o).
4.4 Zapobieganie i unikanie blokad.
Zapobiec spełnieniu jednego z 4 warunków koniecznych wystąpienia blokady:
-
wzajemne wyłącznie: na ogół niemożliwe; niektóre zasoby są z definicji niepodzielne (drukarka,
plik do pisania...)
-
Przetrzymywanie -
trzeba zagwarantować, że gdy proces żąda zasobu, to nie posiada innych
zasobów: pozwalać na zamówienie tylko gdy zwolni wszystkie posiadane (problem: głodzenie i
nieefektywne wykorzystanie zas
obów).
-
Można wymagać, by proces zamawiał i dostawał wszystkie swoje zasoby zanim rozpocznie
działanie lub żądał zasobów wtedy, gdy nie posiada żadnych innych - niskie wykorzystanie
zasobów, możliwość zagłodzenia
-
Brak wywłaszczeń: jeśli proces będący w posiadaniu zasobów żąda zasobu, którego nie
można natychmiast przydzielić, to musi zwolnić wszystkie posiadane zasoby - Wywłaszczone
zasoby dodaje się do listy zasobów, na które czeka proces
-
Cykliczne czekanie: narzuca się uporządkowanie całkowite wszystkich typów zasobów i
wymaga, by proces zamawiał zasoby we wzrastającym porządku ich numerów (metoda
wyklucza powstawanie cykli)
powyższe metody zawsze ograniczają przepustowość systemu...
Unikanie blokad:
-
Wymaga, by system posiadał pewną informację o przyszłym zapotrzebowaniu na zasoby
-
W najprostszym modelu wymaga się, by proces deklarował maksymalną liczbę zasobów
każdego typu, których będzie potrzebował
-
Algorytm unikania blokady dynamicznie bada stan przydziału zasobów, by zapewnić, że nigdy
nie dojdzie do cyklicznego oczekiwania
-
Stan systemu jest określony przez liczbę dostępnych i przydzielonych zasobów oraz przez
maksymalne zapotrzebowanie procesów.
Systemy operacyjne
– notatki do wykładu
15
Stan bezpieczny -
kiedy proces żąda dostępnego zasobu, system musi ustalić, czy
natychmiastowy przydz
iał zasobu zachowa bezpieczny stan systemu
System jest w stanie bezpiecznym, gdy istnieje bezpieczna sekwencja <P1 , P2 , ..., Pn > :
bezpieczna, jeśli dla każdego P i jego potencjalne zapotrzebowanie na zasoby można
zaspokoić przez bieżąco dostępne zasoby oraz zasoby będące w posiadaniu procesów Pk ,
gdzie k < i.
-
Jeśli system jest w stanie bezpiecznym to nie ma blokady
-
Jeśli system nie jest w stanie bezpiecznym to istnieje możliwość blokady. Można unikać
blokady zapewniając, że system nigdy wejdzie do stanu niebezpiecznego.
Algorytm unikania korzystający z grafu przydziału zasobów: (dla zasobów pojedynczych):
-
wprowadzamy krawędzie deklaracji (zapotrzebowania) – rysowane linią przerywaną)
-
szukamy pętli w grafie (złożoność O(n
2
) )
-
jeśli jest pętla – nie przydzielamy zasobu.
Algorytm unikania (dla zasobów wielokrotnych – tzw. alg. bankiera. Por. A Silbershatz i.in.
Podstawy syst. operacyjnych rozdz. 6.4.1 str. 208.):
-
Każdy proces musi a priori złożyć maskymalne zapotrzebowanie na zasoby
-
Proces żądający zasobu być może będzie musiał czekać, mimo że zasób jest dostępny..
-
Gdy proces dostanie wszystkie potrzebne zasoby, to zwróci je w skończonym czasie
-
Po zamówieniu przez proces zasobów system ustala czy ich przydzielenie prowadzi do stanu
bezpiecznego.
Z
ałożenia:
n
– liczba procesów
m
– liczba typów zasobów
int Dostępne[m] – liczba zasobów określonego typu (np. Dostępne[3]=5 to 5 zasobów typu 3)
int Maks[n][m]
– maksymalne żądania procesów
int Przydzielone[n][m]
– przydzielone zasoby
int Potrzebne[n][m]
– potrzebne zasoby (z tym, że Potrzebne[i][j]=Maks[i][j]-Przydzielone[i][j])
int Zamówienia[n][m] – aktualne zamówienia procesu.
Algorytm:
1.
Jeśli Zamówienia[i] <= Potrzebne[i] to wykonaj krok 2. Wpp błąd – proces przekroczył
deklarowane zapotrzebowanie.
2.
Jeśli Zamówienia[i] <= Dostępne wykonaj krok 3. Wpp proces i musi czekać.
3.
System próbuje przydzielić żądane zasoby procesowi i zmieniając stan systemu w następujący
sposób:
Dostępne = Dostępne – Zamówienia[i]
Przydzielone[i] = Przydzielone[i] + Zamówienia[i]
Potrzebne[i] = Potrzebne[i]
– Zamówienia[i]
Jeśli stan po zmianie jest bezpieczny, transakcja dochodzi do skutku. Jeśli nie – proces i
musi czekać...
Algorytm bezpieczeństwa:
1. int Praca[m]; int Koniec[n]
2.
Praca = Dostępne; Koniec[i] = FALSE dla wszystkich i
3.
Znajdujemy i takie że Koniec[i]=FALSE oraz Potrzebne[i] <= Praca; Jeśli nie ma takiego i do
kroku 5.
4.
Praca = Praca + Przydzielone[i]; Koniec[i] = TRUE; przejdź do kroku 2.
5.
Jeśli Koniec[i] = TRUE dla wszystkich i, to system jest w stanie bezpiecznym...
Koszt stwierdzenia czy system jest bezp. = m x n
2
4.5 Wykrywanie i wychodzenie z blokady.
W systemach bez zapobiegania i unikania musi być:
-
alg. wykrywania blokady (najczęściej: poszukiwanie cykli w grafie)
-
alg. wychodzenia z blokady

Systemy operacyjne
– notatki do wykładu
16
Kiedy wywoływać algorytm wykrywania blokady:
-
gdy nie można natychmiast przydzielić zasobu
-
raz na ustalony czas (np. 10 min)
-
gdy obciążenie procesora spada poniżej ~40% (blokada dławi przepustowość systemu)
Wychodzenie z blokady (sposoby):
-
Powiadomienie operatora (ro
związuje problem ręcznie)
-
Usunięcie procesu(ów) uczestniczących w blokadzie
całej pętli (znaczny koszt, utrata częściowych wyników)
kolejno (wywołanie szukania cykli po każdym usunięciu)
-
różne kryteria wyboru ofiary (priorytet, typ, posiadane zasoby...)
-
Wywłaszczanie z zasobów (potrzebna gwarancja że nie będzie głodzenia – np. wywłaszczenie
możliwe max. k razy)
Ogólnie (bsługa blokad):
-
zapobieganie, unikanie, wykrywanie, usuwania
We współczesnych systemach: - podział zasobów na klasy:
-
do klas stosujemy zapobieganie cyklom
-
w obrębie klas:
-
zasoby wewnętrzne (bloki kontr. itp...) uporządkowanie zasobów
-
pamięć głowna
-
urządzenie i pliki unikanie blokad
5. Zarządzanie pamięcią
5.1 Założenia wstępne:
-
pamięć mieści cały program (o wyjątkach poniżej)
-
pamięć to tablica poadresowanych słów
-
współpraca z pamięcią polega na pisaniu/czytaniu z/pod adres
-
procesy pobierane są do pamięci z kolejki zadań.
Różne mechanizmy:
Wiązanie:
-
proces może rezydować w dowolnej częsci pamięci; musi istnieć mechanizm wiązania
rozkazów i danych z adresami fizycznymi.
-
wiązanie może nastąpić w czasie:
- kompilacji
(przy założeniu że proces rozpoczyna się od adresu X – np. pliki *.com w dos)
-
ładowania (po przemieszczeniu kodu trzeba przeładować)
- wykonania
(możliwe przemieszczenia)
Ładowanie dynamiczne: podprogramy są na dysku w formie przemieszczalnej i są ładowane
po wywołaniu przez pr. główny. zaleta: nie ładujemy nieużywanego kodu.
Łączenie dynamiczne (bez niego wszystkie programy musza mieć swoje kopie bibliotek
systemowych (np. DLL). W miejscach odwołań znajdują się zakładki (małe fr. kodu, po
wywołaniu podające adres procedury bibliotecznej)
Nakładki (np. *.ovl) – w pamięci jest tylko niezbędny kod, nakładki się wyłączają (na ogół), są
przechowywane
na dysku w postaci bezwzględnego obrazu pamięci.
ponieważ procesy wykonują się wyłącznie w pamięci, nie zawsze wszystkie się mieszczą. Więc:
5.2 Wymiana.
Proces może zostać czasowo wysłany z pamięci głównej do zewnętrznej, a po jakimś czasie
sprowadzony
ponownie do pamięci głównej

Systemy operacyjne
– notatki do wykładu
17
Program wraca w to samo miejsce, chyba że mamy do czynienia z wiązaniem w czasie
wykonania.
Jako pamięć zewnętrzna na potrzeby wymiany służy duży szybki dysk z dostępem
bezpośrednim
Główny narzut: czas transmisji; dla dobrej wydajności czas wykonania musi być długi w
porównaniu z czasem przełączania.
System musi wiedzieć o zapotrzebowaniu na pamięć by pracować efektywnie, przydziału
dokonują funkcje systemowe.
W czasie wymiany nie mogą występować operacje we/wy (operujące na buforach pamięci)
nie wymienia się procesów we/wy a buforami opiekuje się system.
Wyszukiwarka
Podobne podstrony:
dobrucki,systemy operacyjne, op Nieznany
,systemy operacyjne, procesy i Nieznany (2)
lewandowski,systemy operacyjne, Koordynacja procesów
Podstawy systemow operacyjnych Nieznany
,systemy operacyjne, system ope Nieznany (2)
Systemy operacyjne
Planowanie systemow projekt 053 Nieznany
5 Systemy Operacyjne 23 11 2010 Zarządzanie procesami
zasady grupy, java, javascript, oprogramowanie biurowe, programowanie, programowanie 2, UTK, systemy
Systemy Operacyjne lab4, Politechnika Wrocławska, Systemy Operacyjne
format[1], Szkoła, Systemy Operacyjnie i sieci komputerowe, systemy, semestr I
System plików, zOthers, Systemy operacyjne i sieci komputerowe
quota, !!!Uczelnia, wsti, materialy, II SEM, systemy operacyjne linux
Rafał Polak 12k2 lab8, Inżynieria Oprogramowania - Informatyka, Semestr III, Systemy Operacyjne, Spr
System operacyjny
48 USTAWA o systemie oceny zgo Nieznany (2)
więcej podobnych podstron