
D
IAGNOSTYKA
’30
CHALAMO
ēSKI, RównomiernoĞü ruchu táoka siáownika hydraulicznego
97
RÓWNOMIERNO
ĝû RUCHU TàOKA SIàOWNIKA HYDRAULICZNEGO
Mariusz CHALAMO
ēSKI
Akademia Techniczno-Rolnicza w Bydgoszczy
Katedra Maszyn Roboczych i Pojazdów
e-mail: chalamon@mail.atr.bydgoszcz.pl
Streszczenie
W opracowaniu przedstawiono wyniki bada
Ĕ nierównomiernoĞci ruchu siáownika hydraulicz-
nego przy uwzgl
Ċdnieniu wpáywu zuĪycia táoczyska siáownika, wielkoĞci obciąĪenia oraz nie-
wspó
áosiowoĞci oddziaáywania obciąĪenia zewnĊtrznego.
S
áowa kluczowe: siáownik hydrauliczny, nierównomiernoĞü, ruch, obciąĪenie
IRREGULARITY OF MOVE PISTON OF HYDRAULIC CYLINDER.
Summary
The results of laboratory reaserch irregularity of move piston of hydraulic cylinder, take into
consideration wear of piston rod, external loading and misalignment external loading.
Keywords: hydraulic cylinder, irregularity of move, external loading, misalignment
1. WST
ĉP
Si
áowniki hydrauliczne o posuwisto-zwrotnym
ruchu t
áoka stosowane są jako elementy wykonaw-
cze w samobie
Īnych maszynach roboczych, wtry-
skarkach, robotach, w uk
áadach hydraulicznych
samolotów i wielu innych z
áoĪonych systemach
technicznych z nap
Ċdem i sterowaniem hydraulicz-
nym.
Z uwagi na charakter i specyfik
Ċ elementów
wykonawczych wymagana jest przede wszystkim
równomierno
Ğü ruchów roboczych. Wymóg ten
zwi
ązany jest z precyzją pozycjonowania táoczyska
si
áownika np. w robotach i podajnikach, z równo-
mierno
Ğcią siáy dociskającej np. w wtryskarkach i
prasach hydraulicznych oraz z bezpiecze
Ĕstwem –
hydraulika samolotowa. Podczas pracy si
áownika
hydraulicznego zachodzi wiele zjawisk maj
ących
wp
áyw na równomiernoĞü ruchu táoka siáownika.
Jednym z tych czynników jest lepko
Ğü oleju hy-
draulicznego,
Istotny wp
áyw na równomiernoĞü ruchu táoka
si
áownika hydraulicznego ma zawartoĞü powietrza
w oleju. Zawarto
Ğü powietrza w oleju na znaczący
wp
áyw na ĞciĞliwoĞü cieczy hydraulicznej.
Kolejnym
parametrem
wp
áywającym
na
równomierno
Ğü ruchu táoka siáownika jest rodzaj
zastosowanego uszczelnienia, oraz elementów
prowadz
ących táoczysko siáownika. Istotny jest
materia
á, z jakiego zostaáy wykonane uszczelnienia,
zacisk
wst
Ċpny, a takĪe iloĞü pierĞcieni
uszczelniaj
ących. PowyĪsze wáasnoĞci elementów
uszczelniaj
ących i prowadzących gáównie za
po
Ğrednictwem tarcia wpáywają na równomiernoĞü
ruchu t
áoka siáownika. NaleĪy takĪe zauwaĪyü, Īe
wy
Īej wymienione wáasnoĞci decydują o
sprawno
Ğci
obj
ĊtoĞciowej
si
áownika
hydraulicznego, maj
ącej bezpoĞredni wpáyw na
równomierno
Ğü ruchu táoka. Kolejnym czynnikiem
warunkuj
ącym równomiernoĞü ruchu táoka
si
áownika jest jego obciąĪenie. Zmiana wielkoĞci
obci
ąĪenia ma bezpoĞredni wpáyw na wáaĞciwoĞci
dynamiczne t
áoka siáownika. Szczególnie istotny
jest rodzaj przy
áoĪonego obciąĪenia. ObciąĪenie
przy
áoĪone niewspóáosiowo jest powodem
znacznych napr
ĊĪeĔ w wĊzáach prowadzących
t
áoczysko, co wiąĪe siĊ ze zmianami
równomierno
Ğci ruchu táoka siáownika.
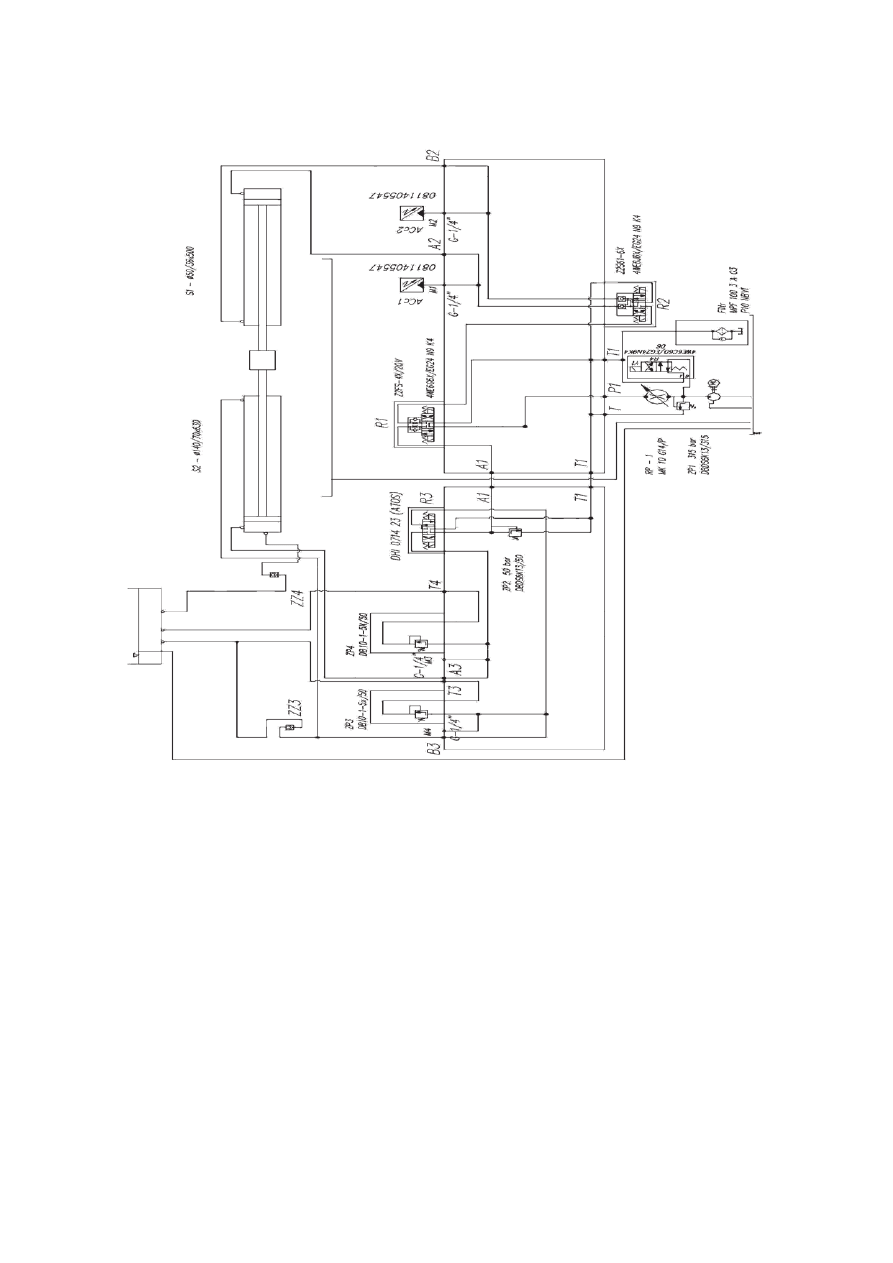
2. STANOWISKO BADAWCZE
Schemat hydrauliczny przedstawiono na rysunku 1.
D
IAGNOSTYKA
’30
CHALAMO
ēSKI, RównomiernoĞü ruchu táoka siáownika hydraulicznego
98
Rys. 1. Schemat hydrauliczny stanowiska badawczego
3. PRZEBIEG BADA
ē
W celu dokonania pomiarów ustalono warunki
pracy si
áownika. Badania przeprowadzono dla
czterech ró
Īnych prĊdkoĞci ruchu táoka siáownika
równych: v
1
= 0,167 m/s, v
2
= 0,05 m/s, v
3
= 0,033
m/s, v
4
= 0,025 m/s. Pomiary przeprowadzono dla
czterech warto
Ğci obciąĪeĔ. WielkoĞci obciąĪeĔ
podczas wysuwania t
áoczyska siáownika badanego
wynosi
áy N
1
= 30 kN, N
2
= 40 kN N
3
= 50 kN, N
4
=
60 kN. Wielko
Ğci obciąĪeĔ podczas ruchu
powrotnego t
áoczyska siáownika badanego wynosiáy
N
1
= 15 kN, N
2
= 20 kN, N
3
= 25 kN, N
4
= 29 kN.
Badania podczas wysuwania t
áoczyska siáownika
hydraulicznego
przeprowadzono
dla
trzech
wielko
Ğci
niewspó
áosiowoĞci
obci
ąĪenia.
Niewspó
áosiowe obciąĪenie osiągniĊto przez
ustalenie po
áoĪenia mechanizmu rolkowego w
odleg
áoĞciach 10mm i 20mm od osi siáowników, w
którym dokonano pomiarów.
Pomiary przeprowadzono dla trzech t
áoczysk o
wymiarach:
36h9, 36c9 36b9. T
áoczyska o
ró
Īnych pasowaniach zastosowano w celu
symulowania
zu
Īycia (pasowanie 36b9 –
najwi
Ċksze zuĪycie, pasowanie 36h9 –
najmniejsze zu
Īycie).
W stanowisku zastosowano olej hydrauliczny
HD 46 VECO. Badania przeprowadzono w zakresie
roboczej temperatury oleju hydraulicznego nie
przekraczaj
ącej 65 qC.
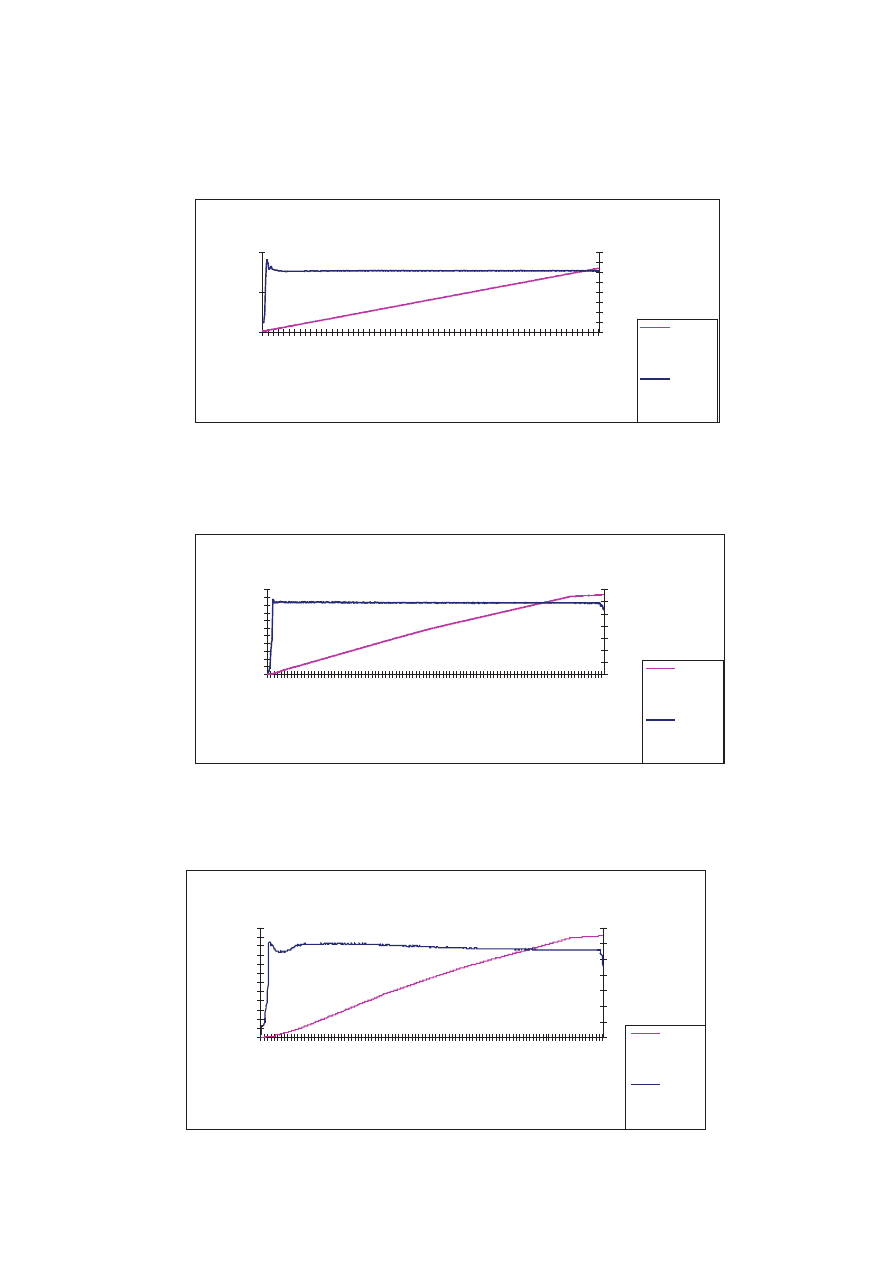
4. WYNIKI BADA
ē I WNIOSKI
Wybrane wyniki bada
Ĕ przedstawiono na
rysunkach 2 - 4. Na osi X podano po
áoĪenie (mm)
t
áoczyska siáownika badanego (pozycja „0 mm”
D
IAGNOSTYKA
’30
CHALAMO
ēSKI, RównomiernoĞü ruchu táoka siáownika hydraulicznego
99
oznacza maksymalne wysuni
Ċcie, pozycja „500
mm” oznacza maksymalne wsuni
Ċcie).
Na osiach Y podano wielko
Ğü obciąĪenia
dzia
áającego na siáownik badany (kN), oraz
jednostki czasu (s).
WY-H9-N30-T3-R0
0,00
2,00
4,00
5
0
8
,6
1
7
6
4
8
9
,0
1
4
7
4
6
2
,7
5
0
0
4
3
6
,3
2
3
5
4
1
0
,1
0
2
9
3
8
3
,9
8
5
3
3
5
8
,3
0
8
8
3
3
2
,0
8
8
2
3
0
6
,6
0
2
9
2
8
0
,3
6
7
6
2
5
4
,7
3
5
3
2
2
8
,5
8
8
2
2
0
2
,8
0
8
8
1
7
6
,9
1
1
8
1
5
0
,9
5
5
9
1
2
5
,1
3
2
4
9
9
,0
7
3
5
7
3
,1
6
1
8
4
7
,1
4
7
1
2
1
,2
6
4
7
Po
áoĪenie táoczyska [mm]
C
z
a
s
[
s
e
k
.]
0,00
5,00
10,00
15,00
20,00
25,00
30,00
35,00
40,00
O
b
c
ią
Īe
n
ie
[
k
N
]
Przyrost
drogi w
funkcji
czasu
Zmiana
obci
ąĪenia
w funkcji
drogi
Rys. 2. Wysuwanie t
áoczyska, táoczysko o pasowaniu h9, obciąĪenie 30 kN, czas wysuwu 3 s.
(
Ğrednia prĊdkoĞü ruchu táoka V
1
= 0,167 m/s), obci
ąĪenie wspóáosiowe (rolka w poáoĪeniu 0)
WY-H9-N60-T20-R0
0,00
2,00
4,00
6,00
8,00
10,00
12,00
14,00
16,00
18,00
20,00
22,00
5
0
8
,9
7
0
6
4
7
9
,9
1
1
8
4
5
1
,7
5
0
0
4
2
5
,6
3
2
4
3
9
8
,5
7
3
5
3
7
0
,1
0
2
9
3
4
0
,5
4
4
1
3
1
0
,5
0
0
0
2
8
0
,3
6
7
6
2
5
1
,0
5
8
8
2
2
3
,1
4
7
1
1
9
7
,1
3
2
4
1
7
1
,2
2
0
6
1
4
5
,3
3
8
2
1
1
9
,7
7
9
4
9
4
,0
8
8
2
6
8
,2
7
9
4
4
2
,3
0
8
8
1
8
,0
7
3
5
1
1
,6
3
2
4
Po
áoĪenie táoczyska [mm]
C
z
a
s
[
s
e
k
.]
0,00
10,00
20,00
30,00
40,00
50,00
60,00
70,00
O
b
c
ią
Īe
n
ie
[
k
N
]
Przyrost
drogi w
funkcji
czasu
Zmiana
obci
ąĪenia
w funkcji
drogi
Rys. 3. Wysuwanie t
áoczyska, táoczysko o pasowaniu h9, obciąĪenie 60 kN, czas wysuwu 20 s. (Ğrednia prĊdkoĞü
ruchu t
áoka V
4
= 0,025 m/s), obci
ąĪenie wspóáosiowe (rolka w poáoĪeniu 0)
WY-H9-N30-T20-R20
0,00
2,00
4,00
6,00
8,00
10,00
12,00
14,00
16,00
18,00
20,00
22,00
24,00
5
0
9
,0
5
8
8
4
9
0
,1
9
1
2
4
5
8
,3
8
2
4
4
2
6
,2
3
5
3
3
9
4
,5
4
4
1
3
6
3
,0
7
3
5
3
3
0
,4
7
0
6
2
9
9
,0
8
8
2
2
6
8
,1
3
2
4
2
3
5
,4
5
5
9
2
0
0
,9
7
0
6
1
6
9
,7
6
4
7
1
3
9
,9
4
1
2
1
0
9
,9
1
1
8
7
9
,5
1
4
7
4
8
,8
6
7
7
1
8
,6
9
1
2
1
1
,0
4
4
1
Po
áoĪenie táoczyska [mm]
C
z
a
s
[
s
e
k
.]
0,00
5,00
10,00
15,00
20,00
25,00
30,00
35,00
O
b
c
ią
Ī
e
n
ie
[
k
N
]
Przyrost
drogi w
funkcji
czasu
Zmiana
obci
ąĪenia
w funkcji
drogi
D
IAGNOSTYKA
’30
CHALAMO
ēSKI, RównomiernoĞü ruchu táoka siáownika hydraulicznego
100
Rys. 4. Wysuwanie t
áoczyska, táoczysko o pasowaniu h9, obciąĪenie 30 kN, czas wysuwu 20 s.
(
Ğrednia prĊdkoĞü ruchu táoka V
4
= 0,025 m/s), obci
ąĪenie niewspóáosiowe (rolka w poáoĪeniu 20)
Ró
Īnice w wielkoĞci nierównomiernoĞci ruchu
dla niewielkich obci
ąĪeĔ i prĊdkoĞci powyĪej okoáo
0,05 m/s s
ą niewielkie. Znaczne róĪnice moĪna
zaobserwowa
ü dopiero przy obciąĪeniach powyĪej
ok. 50 kN i pr
ĊdkoĞci ruchu táoka poniĪej okoáo
0,034 m/s. Podczas ruchu wsuwowego t
áoka
badanego si
áownika hydraulicznego wystĊpują
ró
Īnice w równomiernoĞci ruchu zaleĪne od
wielko
Ğci obciąĪenia, oraz prĊdkoĞci wsuwu. Ruch
t
áoka przy prĊdkoĞciach powyĪej ok. 0,05 m/s nawet
przy znacznych obci
ąĪeniach (do ok. 29 Mpa)
charakteryzuje si
Ċ duĪą równomiernoĞcią.
Nierównomierno
Ğü ruchu w zakresie prĊdkoĞci
poni
Īej ok. 0,05 m/s zwiĊksza siĊ przy obciąĪeniach
powy
Īej ok. 20 kN. Szczególnie widoczna jest
wielko
Ğü nierównomiernoĞci ruchu táoka w
pocz
ątkowym i koĔcowym poáoĪeniu táopka. Istotny
wp
áyw na równomiernoĞü ruchu táoka siáownika
hydraulicznego ma niewspó
áosiowoĞü przyáoĪonego
obci
ąĪenia. PowyĪsza zaleĪnoĞü wystĊpuje w
znacznym stopniu poni
Īej Ğrednich prĊdkoĞci ruchu
t
áoka równych 0,05 m/s. ZaleĪnoĞü ta moĪe byü
wynikiem znacznych si
á dziaáających na wĊzáy
prowadz
ące táoczysko, oraz táok wywoáanych
niewspó
áosiowoĞcią obciąĪenia.
Pr
ĊdkoĞü ruchu táoka siáownika hydraulicznego
ma decyduj
ący wpáyw na jego równomiernoĞü.
Wraz ze wzrostem pr
ĊdkoĞci ruchu táoka roĞnie
równomierno
Ğü ruchu.
LITERATURA
[1] Chalamo
Ĕski M. „Diagnozowanie ukáadów
hydraulicznych maszyn roboczych”. Wydaw.
Uczelniane ATR, Bydgoszcz 2000
[2] Chalamo
Ĕski M.: Diagnozowanie ukáadów
hydrauliki maszynowej. Diagnostyka. Vol. 26,
PTDT, Olsztyn, 2002.
[3] Chalamo
Ĕski M.: Podstawy diagnostyki
uk
áadów hydrauliki maszynowej. Hydraulika i
Pneumatyka. 3/2003. SIMP, Wroc
áaw, 2003.
Dr hab. in
Ī. Mariusz CHALAMOēSKI prof. nadzw. ATR w dziaáalnoĞci naukowej
zajmuje si
Ċ problematyką diagnozowania ukáadów hydraulicznych i pneumatycznych. Ma
na swoim koncie ok. 100 publikacji, w tym 1 publikacj
Ċ ksiąĪkową. Jest czáonkiem
Polskiego Towarzystwa Diagnostyki Technicznej, v-ce przewodnicz
ącym Zespoáu
ĝrodowiskowego SPE KBM PAN. Wypromowaá kilkudziesiĊciu absolwentów studiów
magisterskich i in
Īynierskich. Wspóápracuje z oĞrodkami naukowymi w kraju i za granicą.
Wyszukiwarka
Podobne podstrony:
httpwww bg utp edu plartdiagnos Nieznany (3)
httpwww bg utp edu plartdiagnos Nieznany
httpwww bg utp edu plartbtp2022 Nieznany
httpwww bg utp edu plartzn20uz1 Nieznany
httpwww bg utp edu plartwybrane Nieznany
httpwww bg utp edu plartbtp2022 Nieznany
httpwww bg utp edu plartpe32006pe32006117124 (1)
httpwww bg utp edu plartbtp2012010bezpieczef1stwo zc
httpwww bg utp edu plartbtp2032009klimiuk
httpwww bg utp edu plartjok32011jok3201199
httpwww bg utp edu plartbtp1 22012pozapb3acowe20formy20pobudzania20motywacji2
httpwww bg utp edu plartme22012mozdzonek
httpwww bg utp edu plartbtp2032009klimiuk
httpwww bg utp edu plartpe32006pe32006117124 (1)
httpwww bg utp edu plartbtp2012010bezpieczef1stwo zc
httpwww bg utp edu plartpe1 32010burchart
więcej podobnych podstron