FILTRY CYFROWE
Celem ćwiczenia jest zapoznanie się z podstawowymi rodzajami liniowych filtrów cyfrowych
typu NOI i SOI, a także metodami projektowania tych filtrów. Innym celem ćwiczenia jest
eksperymentalna weryfikacja właściwości filtracyjnych opracowanych w ramach ćwiczenia
struktur filtrów.
1. Wprowadzenie
Filtrem cyfrowym nazywamy przetwornik czasowo-dyskretnego sygnału wejściowego x[n] na
czasowo-dyskretny sygnał wyjściowy y[n], rys.1.
x[n]
y[n]
Filtr
cyfrowy
Rys.1. Filtr cyfrowy
Algorytm według którego następuje przetwarzanie sygnału wejściowego x[n] w sygnał
wyjściowy y[n] nosi nazwę funkcji przetwarzania filtru albo charakterystyki filtracji.
Do podstawowych charakterystyk filtracji zalicza się:
•
w dziedzinie czasu dyskretnego
•
równania różnicowe,
•
impulsową funkcję przejścia układu dyskretnego,
•
w dziedzinie częstotliwości:
•
transmitancję Z filtru,
•
charakterystyki częstotliwościowe.
Synteza filtrów cyfrowych polega więc na zaprojektowaniu jednej z wymienionych wyżej
charakterystyk filtracji realizowanych następnie w różnych strukturach układowych.
Materiały dydaktyczne powielane
1
1.1. Realizacje filtrów cyfrowych
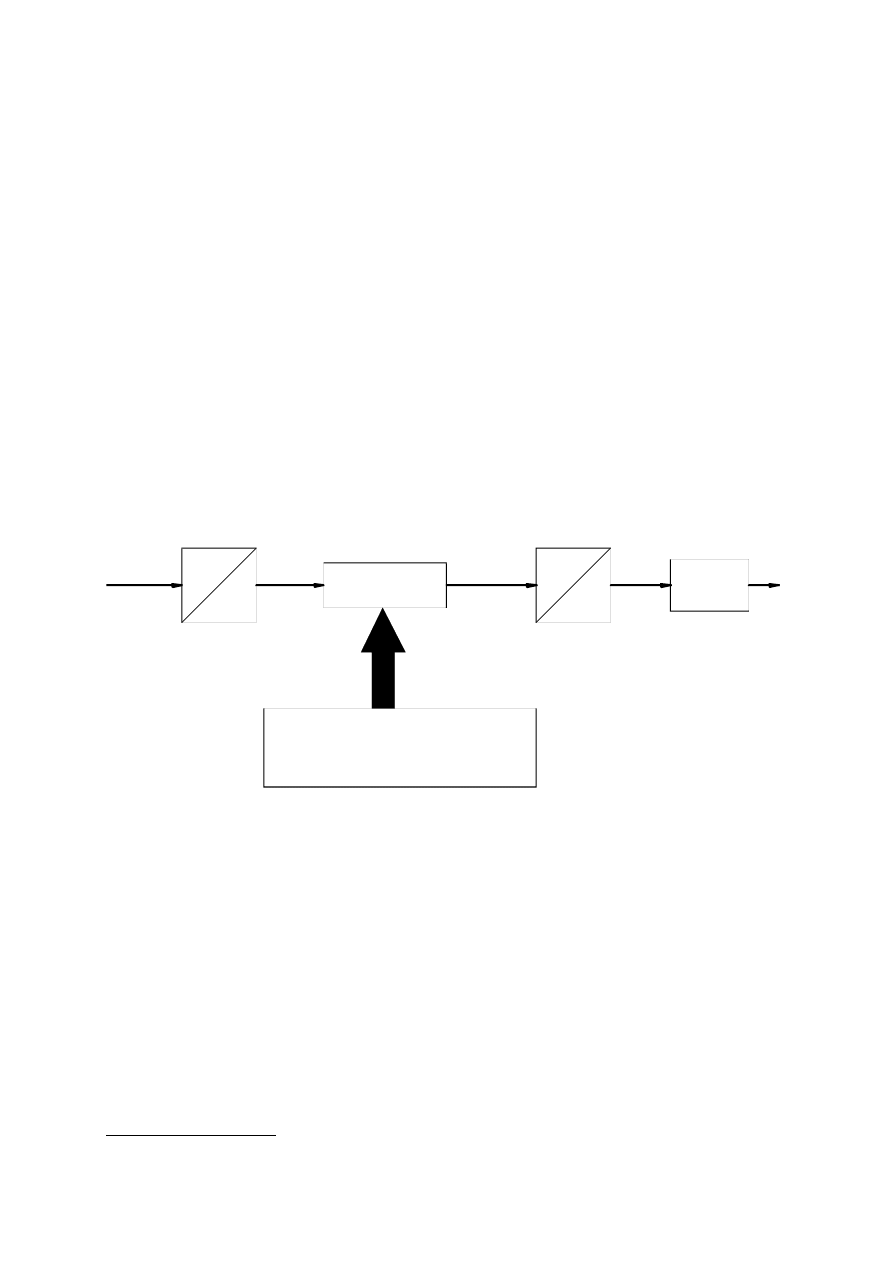
Podstawowy sposób realizacji filtrów cyfrowych pokazano na rys.2. Sygnał analogowy x(t)
zostaje podany konwersji w przetworniku A/C na sygnał cyfrowy który zostaje doprowadzony
do procesora realizującego zadaną funkcję przetwarzania filtru. W praktyce układ
mikroprocesorowy jest realizowany w różny sposób:
−
w postaci komputera uniwersalnego np. klasy PC, wyposażonego w kartę pomiarową,
−
w postaci systemu mikroprocesorowego realizowanego obecnie najczęściej z
wykorzystaniem procesorów jednoukładowych,
−
w postaci procesora sygnałowego
−
w postaci układu scalonego S.C. (switched capacitors) sterowanego z komputera
uniwersalnego.
Cyfrowy sygnał wyjściowy procesora zostaje następnie poddany konwersji w przetworniku
C/A na sygnał analogowy. Z reguły sygnał ten poddaje się jeszcze uśrednieniu z
wykorzystaniem filtru dolnoprzepustowego.
A
C
x(t)
y(t)
FDP
PROCESOR
ALGORY TM FILTRACJI
czyli
FUNKCJA PRZETWARZANIA FILTRU
A
C
Rys.2. Schemat ideowy filtru cyfrowego
Pierwsze trzy z wymienionych realizacji bazują na idei cyfrowego przetwarzania sygnałów,
czwarta natomiast wykorzystuje inne idee (układy S.C. stanowią grupę pośrednią pomiędzy
układami analogowymi i cyfrowymi) i nie jest rozpatrywana w dalszej części instrukcji.
Realizacja charakterystyk filtracji filtru polega więc w istocie na syntezie odpowiedniego
algorytmu przetwarzania realizowanego przez procesor. Stopień scalenia struktury filtru
(rys.2) jest różny i największy w przypadku stosowania jako filtru procesora sygnałowego lub
filtru realizowanego w klasie SC.
1.2. Funkcja przetwarzania filtrów cyfrowych
Wyróżnić można dwie podstawowe klasy liniowych i stacjonarnych filtrów cyfrowych.
1
Informacje zawarte w tym punkcie wymagają znajomości teorii układów dyskretnych – literatura [1], [2]
2
Do pierwszej z nich zalicza się filtry nazywane nierekursywnymi lub transwersalnymi. Filtry
takie opisuje równanie różnicowe nierekursywne:
y[n]=b
0
x[n]+b
1
x[n-1]+...+b
m
x[n-m]
(1)
Sygnał wyjściowy filtru y[n] jest określony bezpośrednio w zależności od sygnału wejściowego
x[n] i jego poprzednich x[n-1], x[n-2]..., x[n-m] wartości. Transmitancję Z tego filtru określa
wzór:
H(z) = b
0
+b
1
z
-1
+ b
2
z
-2
+...+b
m
z
-m
,
(2)
a jego odpowiedź impulsowa h[n] posiada skończona liczbę składników
h[n] = b
0
δ
[n]+ b
1
δ
[n-1]+...+ b
m
δ
[n-m]
(3)
gdzie:
δ
[] - symbol delty Kroneckera
Z wymienionego powodu filtry te nazywamy filtrami o skończonej odpowiedzi impulsowej
(SOI lub FIR).
Do drugiej klasy zalicza się filtry nazywane rekursywnymi. Filtry te opisują równania
rekurencyjne:
y[n]+a
1
y[n-1]+a
2
y[n-2]+...+a
m
y[n-m] = x[n]
(4)
lub
y[n]+a
1
y[n-1]+a
2
y[n-2]+...+a
m
y[n-m]=b
0
x[n]+b
1
x[n-1]+...+b
m
x[n-m]
(5a)
który można w następujący sposób wyprowadzić ze struktury kanonicznej (rys 3) przy
założeniu, że układ jest w stanie zerowym.
w[n]+a
1
w[n-1]+a
2
w[n-2]+...+a
m
w[n-m] =x[n]
y[n]=b
0
w[n]+b
1
w[n-1]+...+b
m
w[n-m]
(5b)
W przypadku układów opisanych równaniami (4), (5) sygnał wyjściowy filtru zależy zawsze od
poprzednich wartości sygnału wyjściowego y[n-1], y[n-2],..., y[n-m]. Transmitancje filtrów
rekursywnych określają wzory:
w przypadku filtru opisanego równaniem(4)
H z =
1
1+a
1
z
−
1
+a
2
z
−
2
+...+a
m
z
−
m
,
(6)
w przypadku filtru opisanego równaniem (5)
H z =
b
0
+b
1
z
−
1
+b
2
z
−
2
+...+b
m
z
−
m
1 +a
1
z
−
1
+a
2
z
−
2
+...+a
m
z
−
m
.
(7)
Materiały dydaktyczne powielane
3
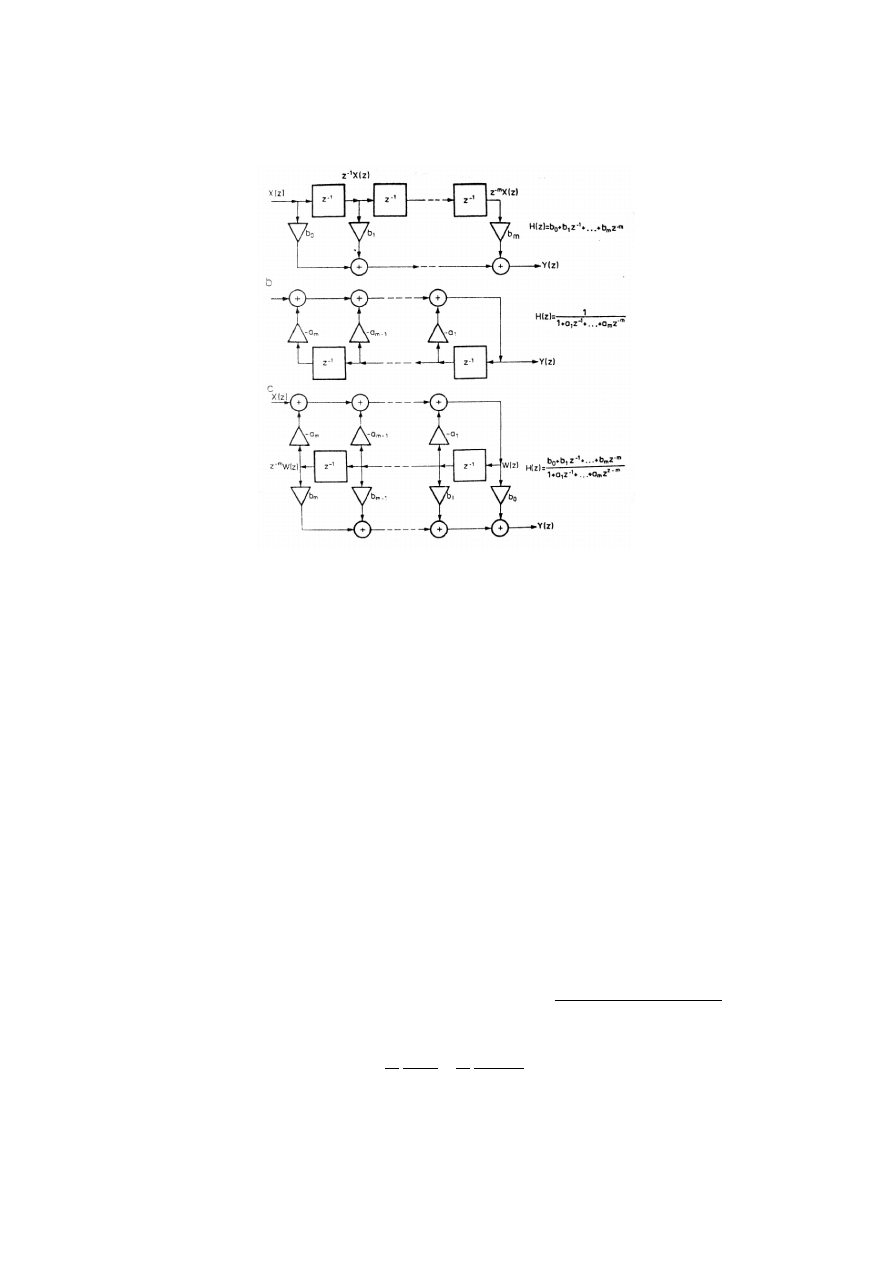
Filtry rekursywne noszą również nazwę filtrów o nieskończonym czasie trwania odpowiedzi
impulsowej (NOI lub IIR). Struktury kanoniczne opisanych typów filtrów pokazano na rys.3.
Rys.3. Struktury kanoniczne filtrów cyfrowych
Z rysunku tego wynika, że filtry SOI nie mają pętli sprzężenia zwrotnego, są więc zawsze
stabilne. Właściwości tej nie mają filtry rekursywne, które mogą być niestabilne. Wykazuje się
[1], że na to by filtr rekursywny był stabilny potrzeba i wystarczy by wszystkie bieguny
transmitancji (6) lub (7) leżały wewnątrz okręgu jednostkowego na płaszczyźnie zespolonej
zmiennej z.
1.3. Projektowanie filtrów cyfrowych
Polega ono na określeniu współczynników a
0
, a
1
,...,a
m
, b
0
, b
1
,...,b
m
transmitancji (równania
różnicowego) filtru na podstawie założonych danych projektowych, podobnie jak w syntezie
układów analogowych.
Spośród wielu metod projektowania filtrów cyfrowych zostanie opisana tylko jednak, w myśl
której układ analogowy o zadanej transmitancji K(s) zastępuje się symulatorem (filtrem)
cyfrowym o transmitancji K(z). Metoda ta nosi nazwę metody transformacji biliniowej.
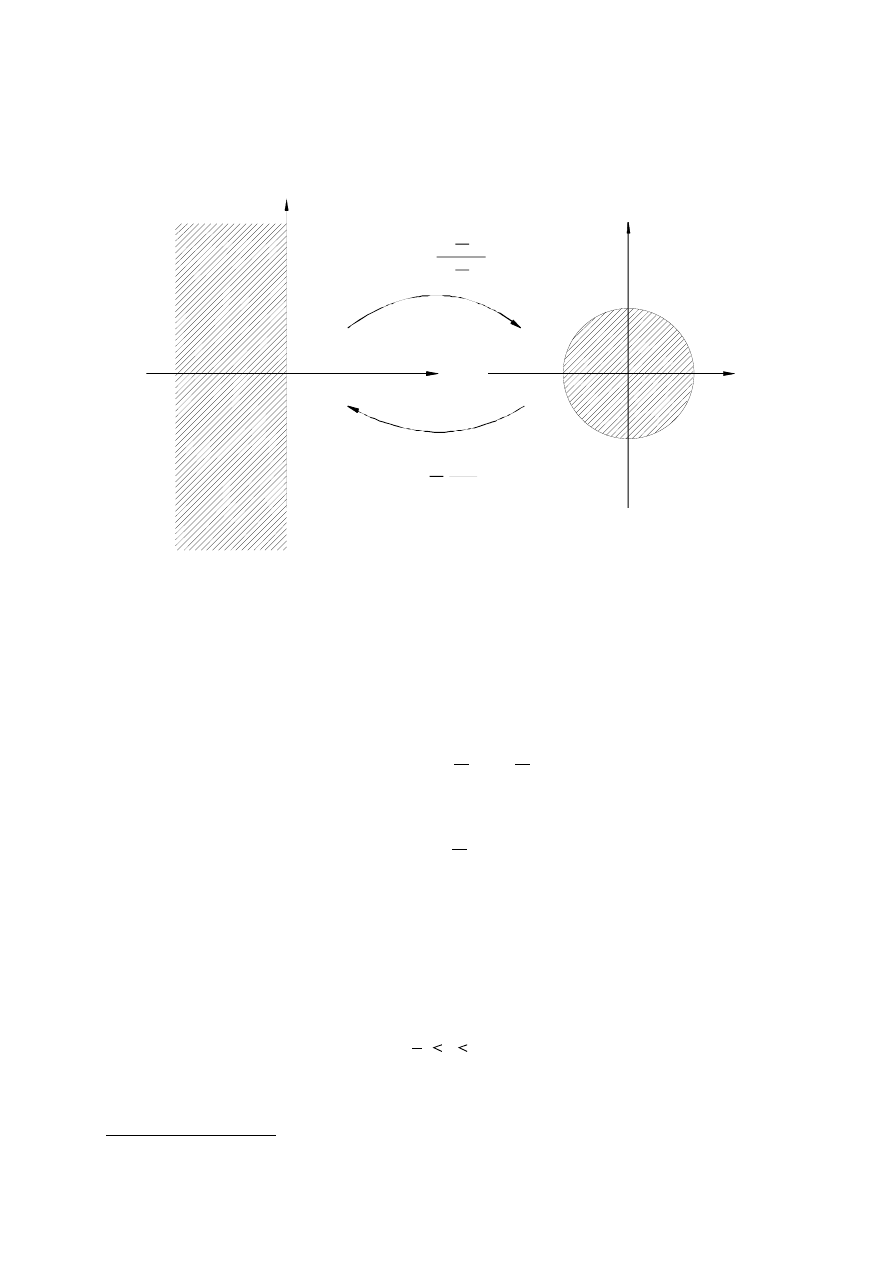
W teorii sygnałów wykazuje się, że odwzorowanie:
s=
2
T
z −1
z+ 1
=
2
T
1−z
−
1
1+z
−
1
(8)
gdzie:
4
T - okres próbkowania
przekształca płaszczyznę zespoloną zmiennej s na płaszczyznę zespolona zmiennej z tak jak to
pokazano na rys.5.
Im
"s"
"z"
Re
Re
Im
z =
T
2
1+ s
1- s
T
2
s = 2
T
1-z
-1
1+z
-1
Rys.5. Ilustracja przekształcenia biliniowego
Lewa domknięta półpłaszczyzna zmiennej s jest tu transformowana na koło jednostkowe na
płaszczyźnie z. Wynika stąd, że stosowanie transformacji biliniowej prowadzi do uzyskiwania
stabilnych filtrów cyfrowych ze stabilnych filtrów (prototypów) analogowych. Można jednak
wykazać, że nieskończony przedział częstości w którym zadane są charakterystyki układu
analogowego zostaje przetransformowany na przedział
−∞
,∞
−
T
≤
T
(9)
Częstotliwość:
=
T
(10)
nosi nazwę częstotliwości Nyquista.
Dobór częstotliwości Nyquista a zatem dobór czasu próbkowania sygnału wejściowego filtru
ma zatem fundamentalne znaczenie. Czas próbkowania T musi być tak dobrany by wartość
pulsacji
ω
(10) była większa niż maksymalna pulsacja widma sygnału analogowego
próbkowanego w zakresie częstości:
s w s
.
(11)
Charakterystyki częstotliwościowe K
d
(jw) filtru cyfrowego (w tzw. pasmie podstawowym)
wyznaczyć można na podstawie wzoru:
2
jest to efektem okresowości charakterystyk częstotliwościowych filtrów cyfrowych [1]
Materiały dydaktyczne powielane
5
K
d
jw =K z ∣
z=e
jwT
=∣
K
d
jw ∣e
j w
(12)
gdzie:
K
d
(jw) - charakterystyka Nyquista filtru cyfrowego
K
d
jw - charakterystyka Bodego filtru cyfrowego (amplitudowa)
K(z) - transmitancja Z filtru cyfrowego
K(s) - transmitancja operatorowa prototypu analogowego
Podstawowe cechy metody projektowania filtrów cyfrowych oparte na transformacji biliniowej
wymieniono poniżej.
1.
Metoda ta jest pojęciowo prosta, do zaprojektowania filtru cyfrowego wystarczy
znajomość transmitancji prototypu analogowego
2.
Zakres częstotliwości w których charakterystyki częstotliwościowe prototypu
analogowego i filtru cyfrowego są zbliżone do siebie zależy od częstotliwości Nyquista a
zatem od częstości próbkowania sygnału wejściowego filtru.
3.
Jeżeli prototyp analogowy jest stabilny, to stabilny jest również odpowiadaj¹cy mu filtr
cyfrowy.
4.
Transmitancja biliniowa nadaje się do projektowania filtrów cyfrowych, których prototypy
analogowe zostały uzyskane na podstawie zadanych charakterystyk amplitudowych (filtry
Butterwortha, Czebyszewa, eliptyczne, itp.) Transformacji tej nie stosuje się do projektowania
filtrów o zadanej charakterystyce fazowej.
Poniżej przedstawiono kilka przykładów ilustrujących problematykę syntezy filtrów ze
szczególnym uwzględnieniem metody transformacji biliniowej.
Przykład 1
Obliczyć transmitancje dyskretne K(z) zadanych prototypów analogowych o transmitancjach
K(s)
A.
K s =
1
s+a
,a= 10
−
4
1
s
,T= 50 ms
K z =
1
2
T
1− z
−
1
1 +z
−
1
+a
=
2 ⋅10
−
5
1 +z
−
1
1−0,6 z
−
1
B.
K(s) = s
K z =
2
T
1−z
−
1
1 +z
−
1
6
C.
K s =
1
s
K z =
T
2
1 +z
−
1
1−z
−
1
D.
K s =
1
s
3
2s
2
2 s+ 1
,T=
p
3
K z =
1−3z
−
1
3z
−
2
+z
−
3
19, 08−21 , 37 z
−
1
12 , 72 z
−
2
−
2 , 5 z
−
3
Przykład 2
Wyznaczyć charakterystyki częstotliwościowe układu o transmitancji
K(s) = s.
Na podstawie przykładu 1(B).
K z =
2
T
1−z
−
1
1 +z
−
1
Stąd i na podstawie wzoru (12) mamy:
K
d
jw =
2
T
1−e
−
jwT
1+e
−
jwT
=
2
T
e
−
jwT
2
e
jwT
2
−
e
−
jwT
2
e
−
jwT
2
e
jwT
2
+e
jwT
2
=
2j
T
tg
wT
2
.
Zatem:
∣
K
d
jw ∣=
2
T
∣
tg
wT
2
∣
Przykład 3
Wyznaczyć charakterystyki częstotliwościowe układu całkującego
K s
1
s
K jw
1
jw
.
Stąd na podstawie wzoru (14) mamy:
K
d
jw =
T
2 j
ctg
wT
2
.
Przykład 4
Materiały dydaktyczne powielane
7
Wyznaczyć charakterystyki częstotliwościowe układu o transmitancji dyskretnej
K z =
T
3
14z
−
1
+z
−
2
1−z
−
2
.
Można tu postąpić w dwojaki sposób
1. Wykorzystując przekształcenie biliniowe odwrotne względem przekształcenia (8)
z=
1
T
2
s
1−
T
2
s
(15)
obliczyć transmitancję prototypu analogowego K(s) i następnie na podstawie wzoru (14)
charakterystyki częstotliwościowe układu dyskretnego.
2. Druga z metod polega na bezpośrednim wykorzystaniu wzoru (12)
Stosując tą metodę mamy:
K
d
jw =
T
3
14 e
−
jwT
+e
−
j2wT
1−e
−
j2wT
=
T
3
e
jwT
+e
−
jwT
4
e
jwT
−
e
−
jwT
=
T
3
2cos wT
j sin wT
(16)
2. Opis układu pomiarowego
Generator sygnałowy jest źródłem fali sinusoidalnej, trójkątnej lub też prostokątnej o
regulowanej amplitudzie i częstotliwości. Sygnały z generatorów zostają doprowadzone do
karty pomiarowej, gdzie ulegają próbkowaniu. Spróbkowane sygnały są zapisywane w postaci
plików ASCII. Realizację filtrów cyfrowych przeprowadza się na drodze programowej z
wykorzystaniem oprogramowania DSP.
3. Przebieg ćwiczenia
3.1. Pobrać próbki sygnału zadanego przez prowadzącego ćwiczenie (dobrać częstotliwość
próbkowania i liczbę próbek tak by spełnić narzucone warunki).
3.2. Uruchomić program PCDSP i zaprojektować filtry FIR realizujące zadanie narzucone
przez prowadzącego.
3.3. W tym celu należy w pierwszej kolejności zaimportować próbki sygnału analogowego z
pliku.Importowanie danych do programu możliwe jest poprzez menu Sequences-> Import
ASCII data file .... (Alt+S; +I).
8
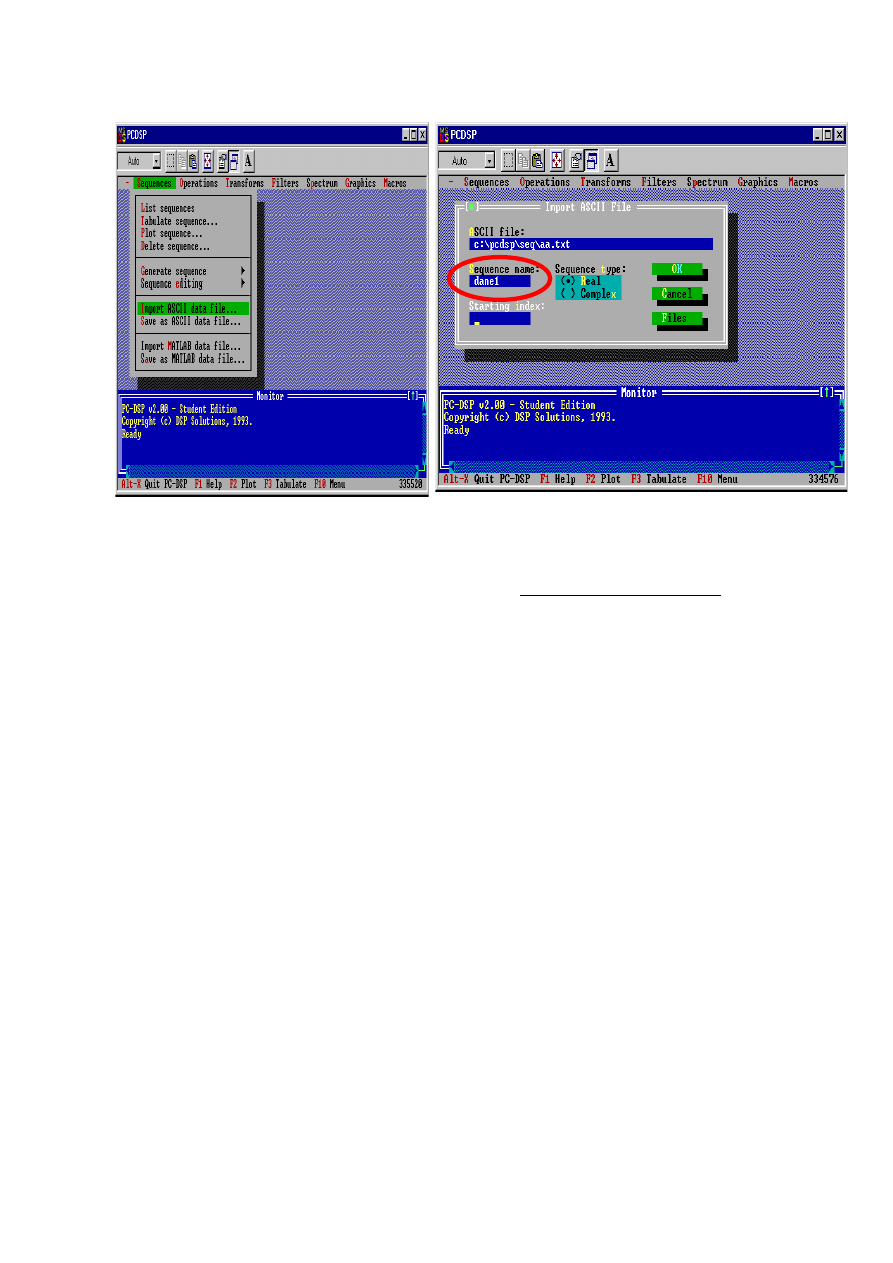
W oknie Import Ascii File należy uzupełnić pole Ascii file, gdzie powinna znajdować się
ścieżka dostępu do pliku z danymi (na laboratorium pliki przechowywane są w katalogu
C:\PCDSP\SEQ). Pole Sequence name powinno zawierać unikalną nazwę „obiektu” przez
którą dane wejściowe będą identyfikowane w programie (a nie przez nazwę pliku !!!).
3.4 Sprawdzić, czy zaimportowany plik jest właściwą reprezentacją sygnału analogowego.
Graficzną prezentacje danych (po zaimportowaniu) można wywołać klawiszem F2 (F2 – Plot –
umożliwia przedstawienie graficznej reprezentacji ostatnio używanego obiektu “Sequence
name”).
3.5. Zaprojektować prototyp analogowy filtru (tzn. wykreślić RĘCZNIE na kartce
charakterystykę amplitudową, z zaznaczonymi częstotliwościami granicznymi pasm)
umożliwiającego zrealizowanie zadania filtracji.
3.6. Zaprojektować filtr FIR (SOI), wszystkimi dostępnymi metodami (tzn. Fourier series
method, Kaiser window design, Frequency sampling method, Parks-McClellan method). Opis
użycia tych metod można znaleźć w helpie programu PCDSP (język angielski).
Proces projektowania filtru przeprowadzany jest w menu Filters (Alt+f). Menu FIR filter
design, umożliwia zaprojektowanie filtru FIR (SOI) czterema metodami. Dla przykładu
przedstawiona zostanie metoda okien Kaiser’a.
Po wybraniu tej opcji w następnym oknie należy wybrać jaki filtr chcemy zaprojektować tzn.
•
dolnoprzepustowy,
•
górnoprzepustowy,
•
środkowo-przepustowy,
•
środkowo-zaporowy.
W zależności od wyboru należy uzupełnić dwa lub cztery pola częstotliwości oznaczone
odpowiednio
Materiały dydaktyczne powielane
9
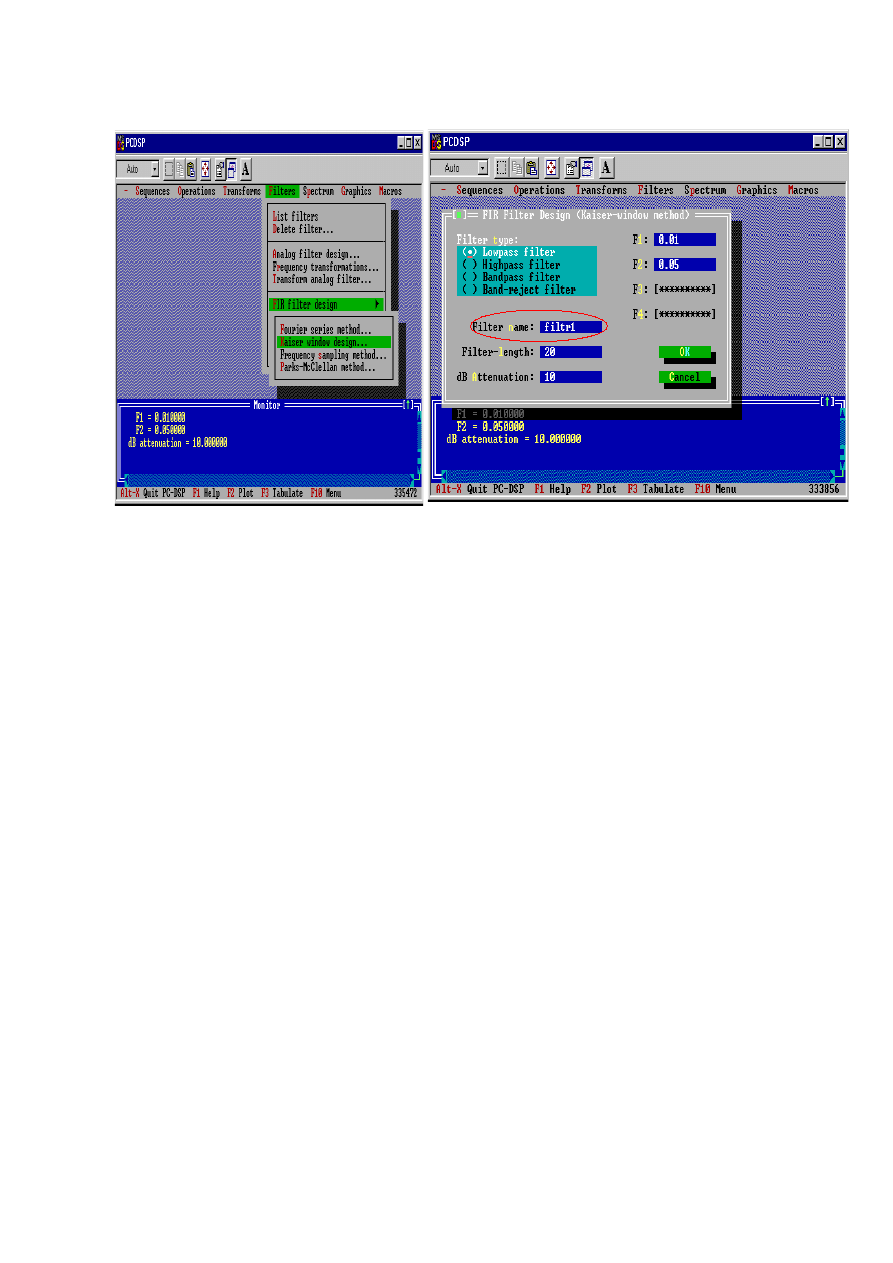
F1 do F4. Częstotliwości graniczne należy zadawać w postaci częstotliwości znormalizowanej
(tzn. wartość częstotliwości w Hz należy podzielić przez częstotliwość próbkowania i tak
otrzymaną wartość wprowadzić do pola Fx). Pomiędzy sąsiednimi częstotliwościami np. F1 i
F2, musi znajdować się zbocze charakterystyki. Dodatkowe pola muszą zawierać:
•
Filter name -> nazwę filtru, przez którą będzie identyfikowany w programie,
•
Filter length -> długość filtru (odpowiednik rzędu dla filtrów analogowych),
•
DB Attenuation -> minimalne tłumienie w paśmie zaporowym.
Poprzez zmianę par częstotliwości oraz tłumienia można zmieniać stromość charakterystyki
filtru. W wersji studenckiej została ograniczona maksymalna długość filtru (do 55), dlatego
może się okazać że filtr nie jest realizowalny przy danych założeniach. Należy wtedy
zmniejszyć nachylenie charakterystyki.
Wybranie OK. (Alt+O) kończy proces projektowania.
3.7. Wykonać analizę filtru (tzn. sprawdzić czy otrzymany filtr jest zgodny z założeniami
projektowymi). Menu Analyze filter ... umożliwia przeprowadzenie analizy charakterystyk
filtru a tym samym przeprowadzenie weryfikacji, czy założenia projektowe zostały
zrealizowane. W oknie Filter Analysis należy w pole Filter name wpisać nazwę filtru jaka
została nadana w procesie projektowania filtru. Następnie należy zaznaczyć rodzaj
interesującej nas charakterystyki tzn. odpowiednio:
•
charakterystyka amplitudowa,
•
charakterystyka amplitudowa decybelowa,
•
charakterystyka fazowa,
•
opóźnienie czasowe,
•
opóźnienie grupowe,
•
odpowiedź impulsowa,
•
położenie zer i biegunów (tylko dla filtrów IIR (NOI)),
•
współczynniki równania różnicowego.
10
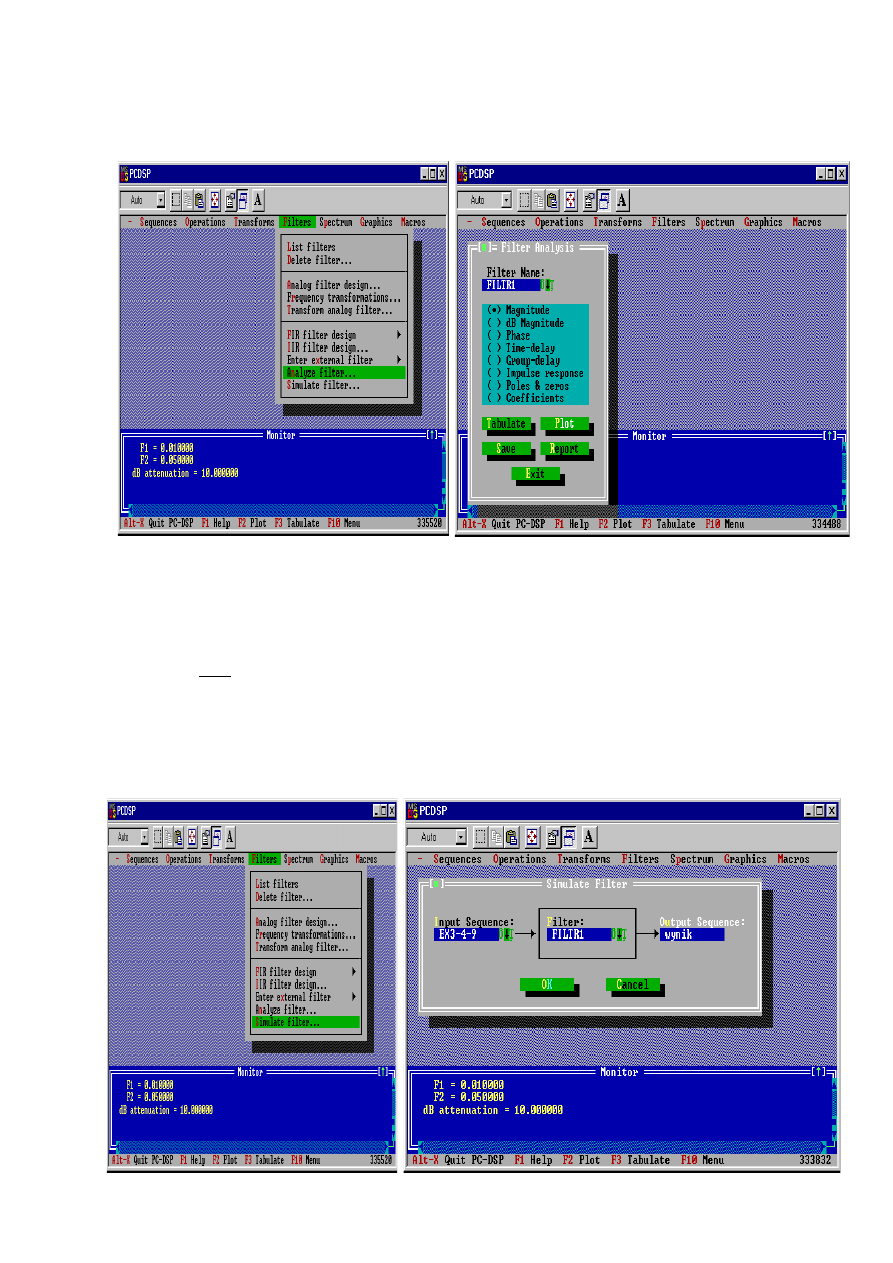
Kombinacja klawiszy ALT+p (Plot) rysuje charakterystykę. Natomiast kombinacja ALT+t
(Tabulate) przedstawia wyniki w postaci tekstowej.
3.8. W tym punkcie należy przeprowadzić filtrację sygnału, przy pomocy zaprojektowanych
filtrów. W tym celu wykorzystana zostanie ostatnia pozycja menu Filters czyli Simulate
filter.... W pola okna Simulate filter należy wpisać odpowiednio:
•
Input sequence – nazwę identyfikującą dane wejściowe (wprowadzaną na etapie importu
danych), NIE NAZWĘ PLIKU !!!
•
Filter – nazwę identyfikującą filtr (wprowadzaną na etapie projektowania filtru),
•
Output Sequence – nazwę identyfikującą dane wyjściowe (dowolna nazwa identyfikująca
„obiekt”).
Wybranie OK. rozpoczyna proces filtracji sygnału wejściowego. Graficzną reprezentację
wyniku działania można (po skończonym procesie filtracji) wywołać klawiszem F2 (Plot).
Materiały dydaktyczne powielane
11
3.9. Zaprojektować filtry IIR realizujące zadanie filtracji
3.10. Zaprojektować filtr IIR (NOI), dla wszystkich dosŧ←pnych aproksymacji.
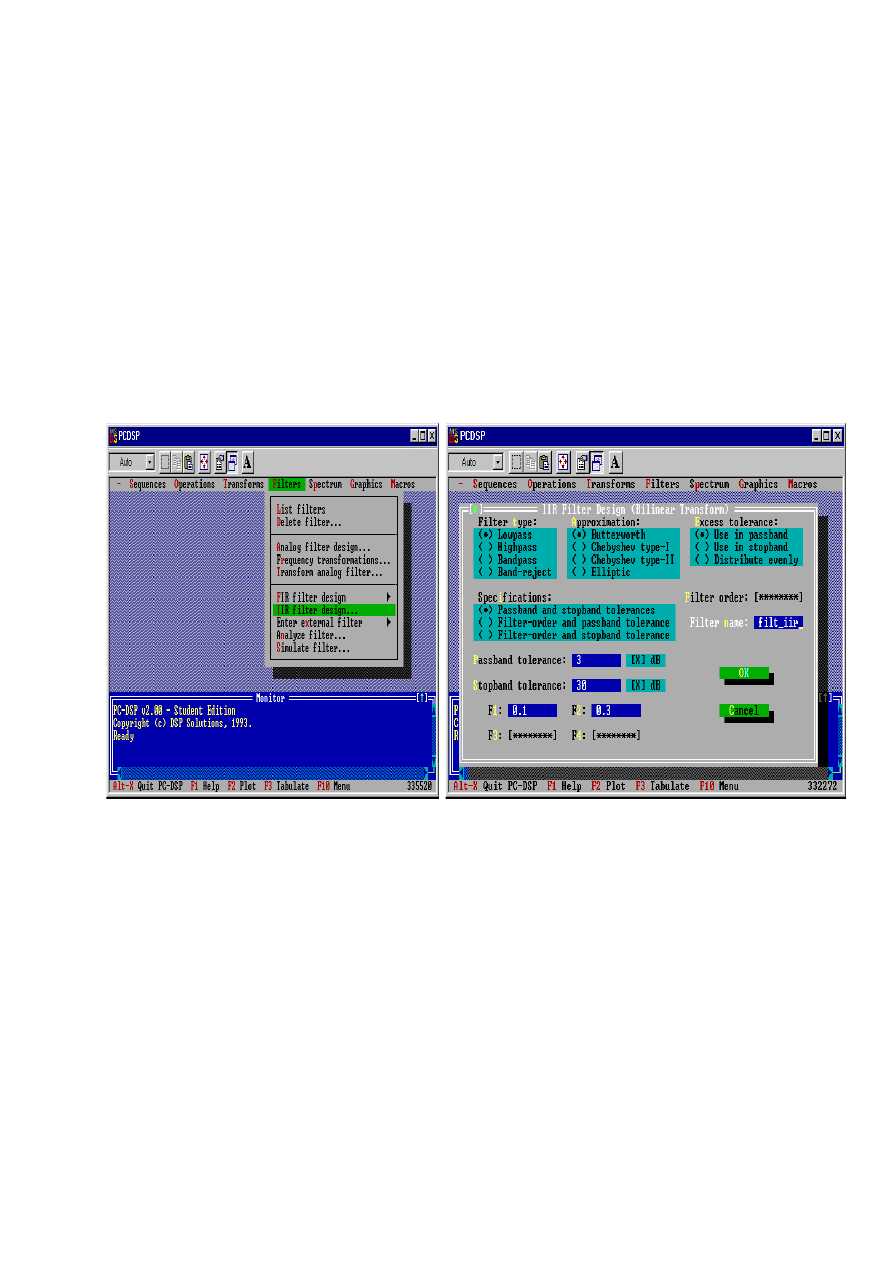
Proces projektowania filtru przeprowadzany jest w menu Filters (Alt+f). Menu IIR filter
design,
umożliwia zaprojektowanie filtru IIR (NOI) z wykorzystaniem czterech aproksymacji:
–
Butterwortha,
–
Czebyszewa I rodzaju,
–
Czebyszewa II rodzaju,
–
Eliptycznej.
Pole “Specyfication” służy do “narzucenia” dodatkowych warunków jakie musi spełniać
charakterystyka:
–
ograniczona tolerancja w paśmie przepustowym i zaporowym,
–
ograniczona długość filtru oraz tolerancja w paśmie przepustowym,
–
ograniczona długość filtru oraz tolerancja w paśmie zaporowym.
Częstotliwości graniczne zboczy (w zależności od wybranego rodzaju filtru i dodatkowych
ograniczeń) należy wprowadzić w pola F1 do F4. Częstotliwości graniczne należy zadawać w
postaci częstotliwości znormalizowanej (tzn. wartość częstotliwości w Hz należy podzielić
przez częstotliwość próbkowania i tak otrzymaną wartość wprowadzić do pola Fx). Pomiędzy
sąsiednimi częstotliwościami np. F1 i F2, musi znajdować się zbocze charakterystyki.
Dodatkowe pola oznaczają:
•
Filter name -> nazwę filtru, przez którą będzie identyfikowany w programie,
•
Filter order -> długość filtru (odpowiednik rzędu dla filtrów analogowych).
Poprzez zmianę par częstotliwości oraz tłumienia można zmieniać stromość charakterystyki
filtru. W wersji studenckiej została ograniczona maksymalna długość filtru, dlatego może się
okazać że filtr nie jest realizowalny przy danych założeniach. Należy wtedy zmniejszyć
nachylenie charakterystyki.
Wybranie OK. (Alt+O) kończy proces projektowania.
3.11. Wykonać analizę filtru (analogicznie jak dla filtrów FIR)
12

3.11. Wykonać filtrację sygnału (analogicznie jak dla filtrów FIR)
4. Opracowanie wyników
Z wszystkich przebadanych filtrów wybrać te (po jednym FIR i jednym IIR), które najlepiej
(proszę przyjąć własne kryterium oceny, które należy później przedstawić podczas obrony)
zrealizowały zadanie filtracji.
W ramach sprawozdania należy:
- zamieścić transmitancje Z i charakterystyki częstotliwościowe wybranych filtrów cyfrowych,
- zamieścić wyniki filtracji (wszystkich filtrów),
- zbadać stabilność wybranych filtrów,
–
opracować wnioski dotyczące ćwiczenia. W sprawozdaniu powinna znaleźć się
minimalna ilość teorii, natomiast główny wysiłek sekcji powinien zostać skierowany na
dyskusję wyników oraz opracowanie wniosków (w tym szczególnie na porównaniu
charakterystyki i właściwości filtrów wykorzystujących różne aproksymacje).
Literatura
[1] Papoulis S.: Obwody i układy. WKŁ, Warszawa 1988.
[2] Wojtkiewicz A.: Elementy syntezy filtrów cyfrowych. WNT, Warszawa 1984.
Dodatek:
Drukowanie z poziomu PCDSP do pliku tekstowego v 0.5
1. Zainstalować w systemie drukarkę “Generic”
Materiały dydaktyczne powielane
13
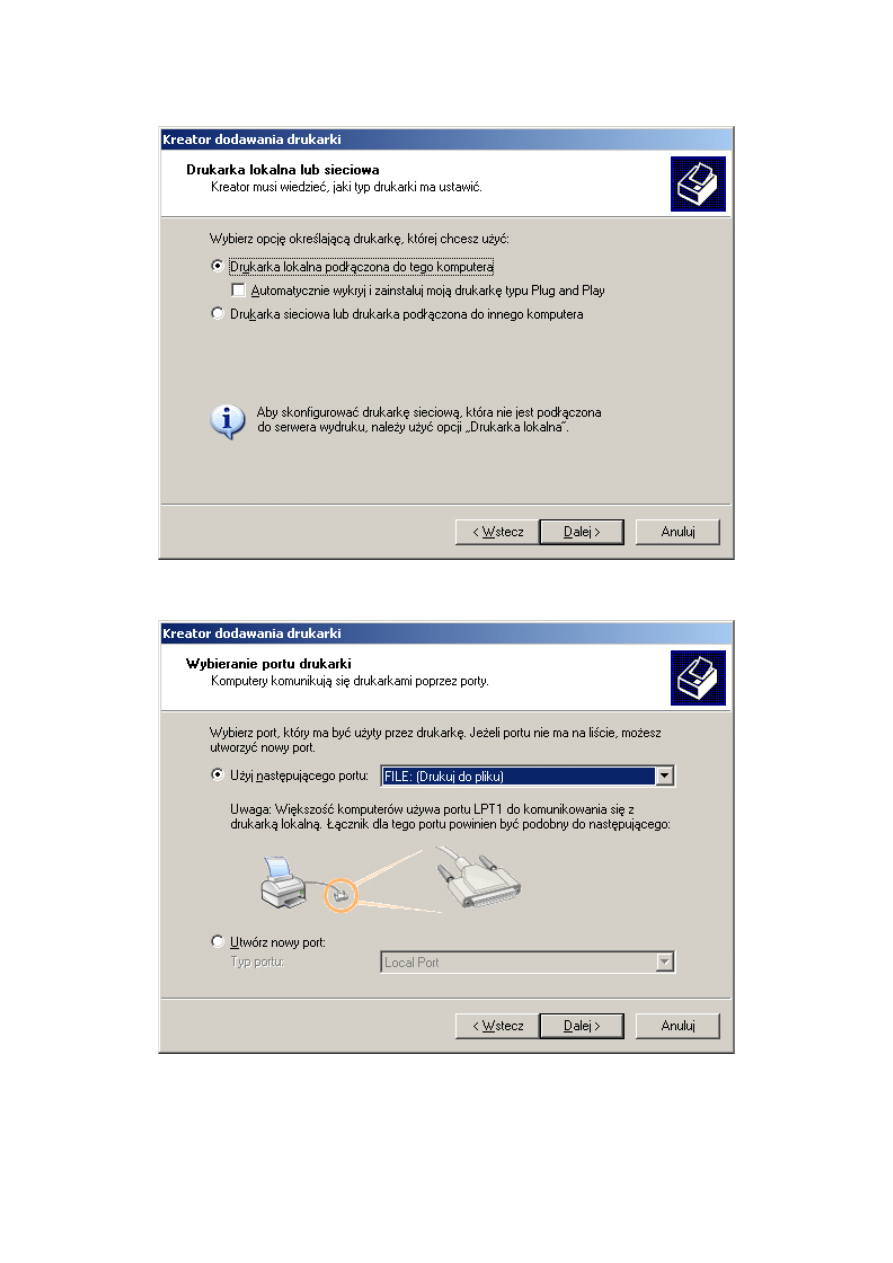
Drukującą do pliku
14
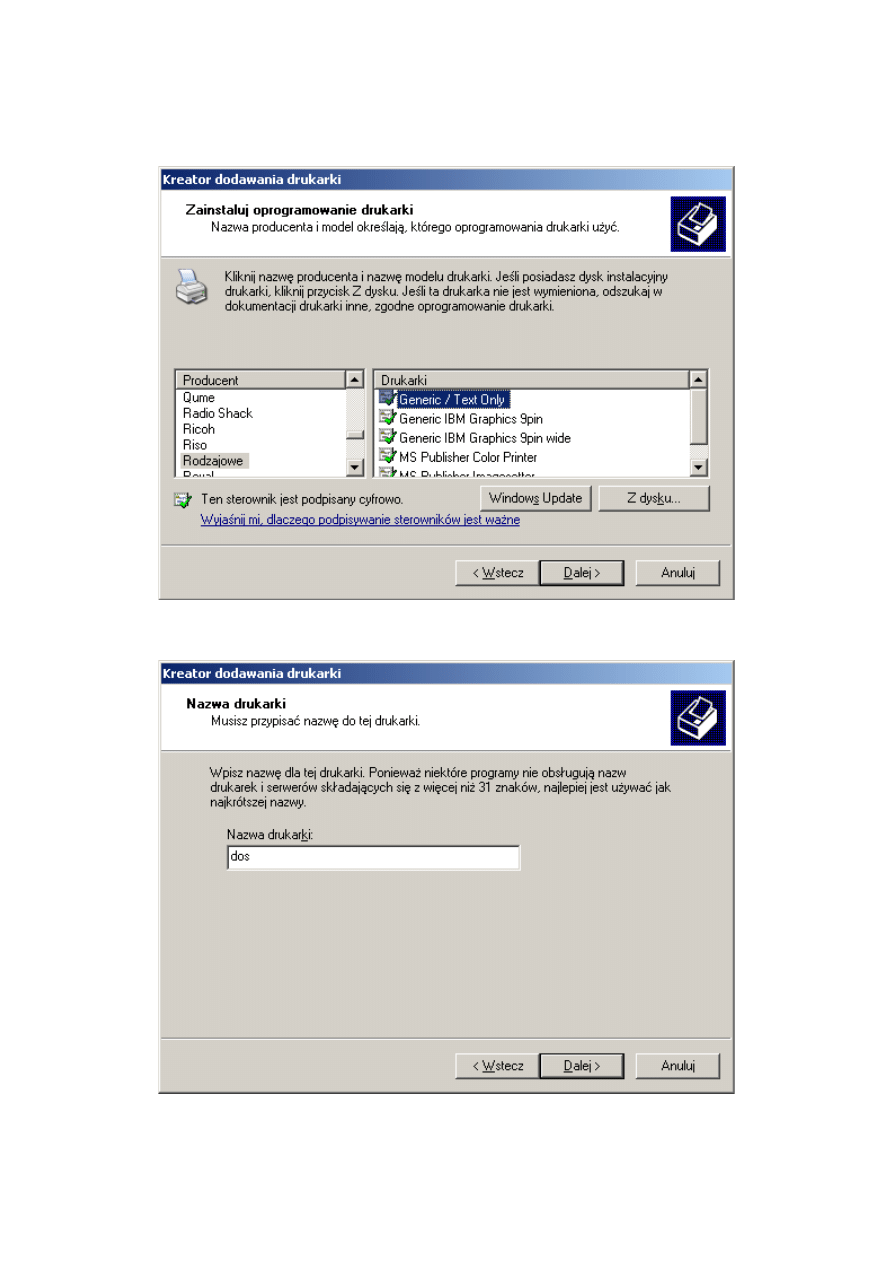
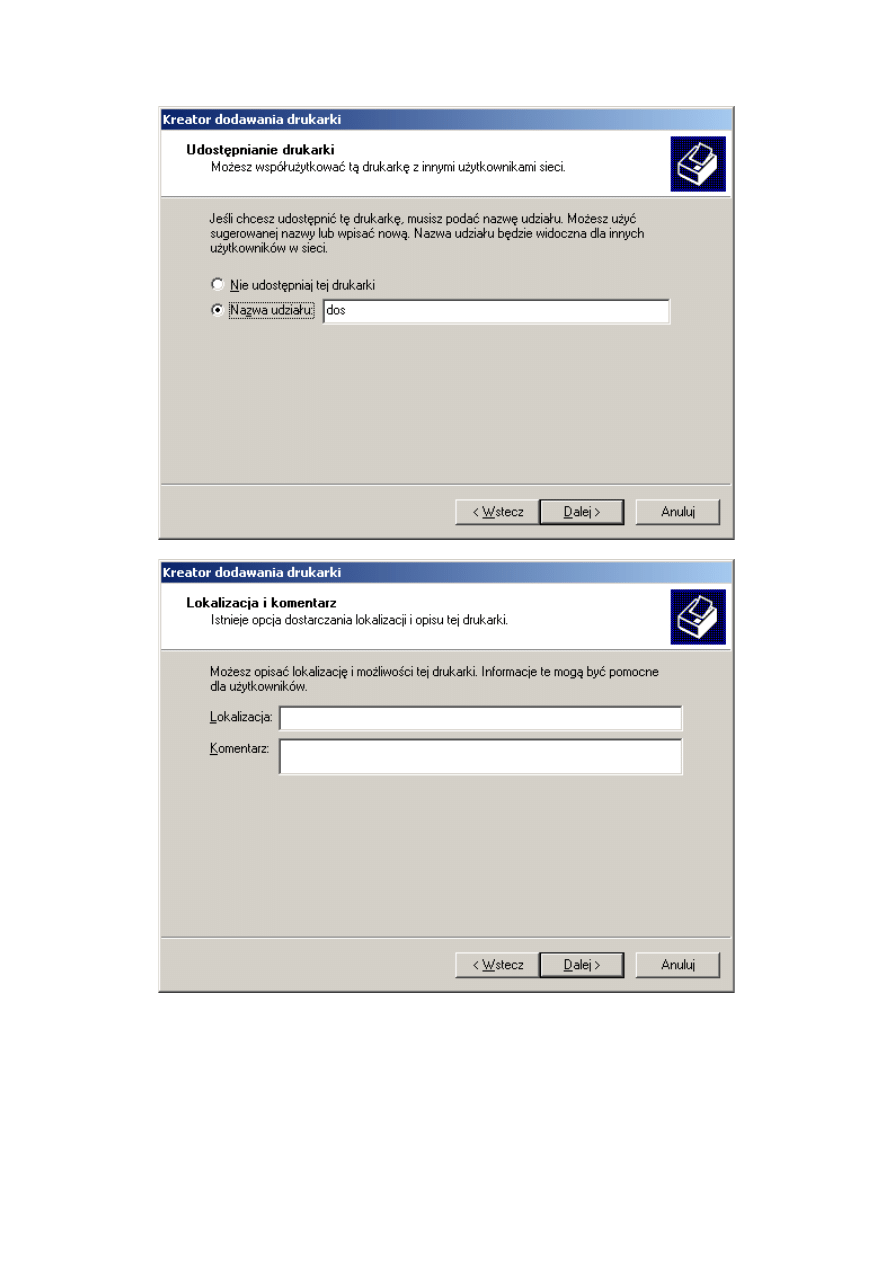
Nadać jej prostą nazwę, np: dos
Udostępnić ją w systemie (też pod prostą nazwą, może być taka sama)
Materiały dydaktyczne powielane
15
Nie drukować strony testowej.
16
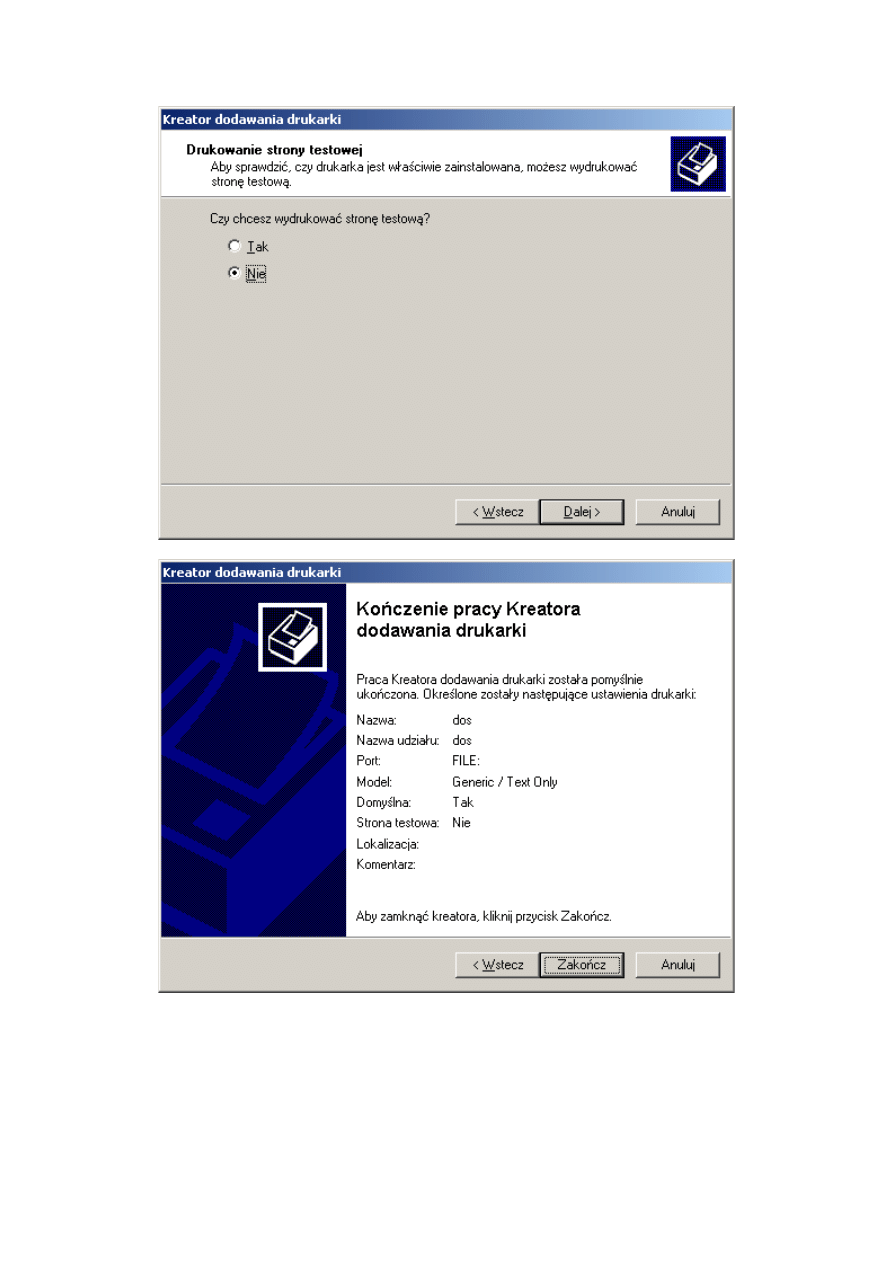
Zakończyć kreatora.
Uruchomić linię komend: Start/Uruchom -> cmd
i wpisać polecenie:
Materiały dydaktyczne powielane
17
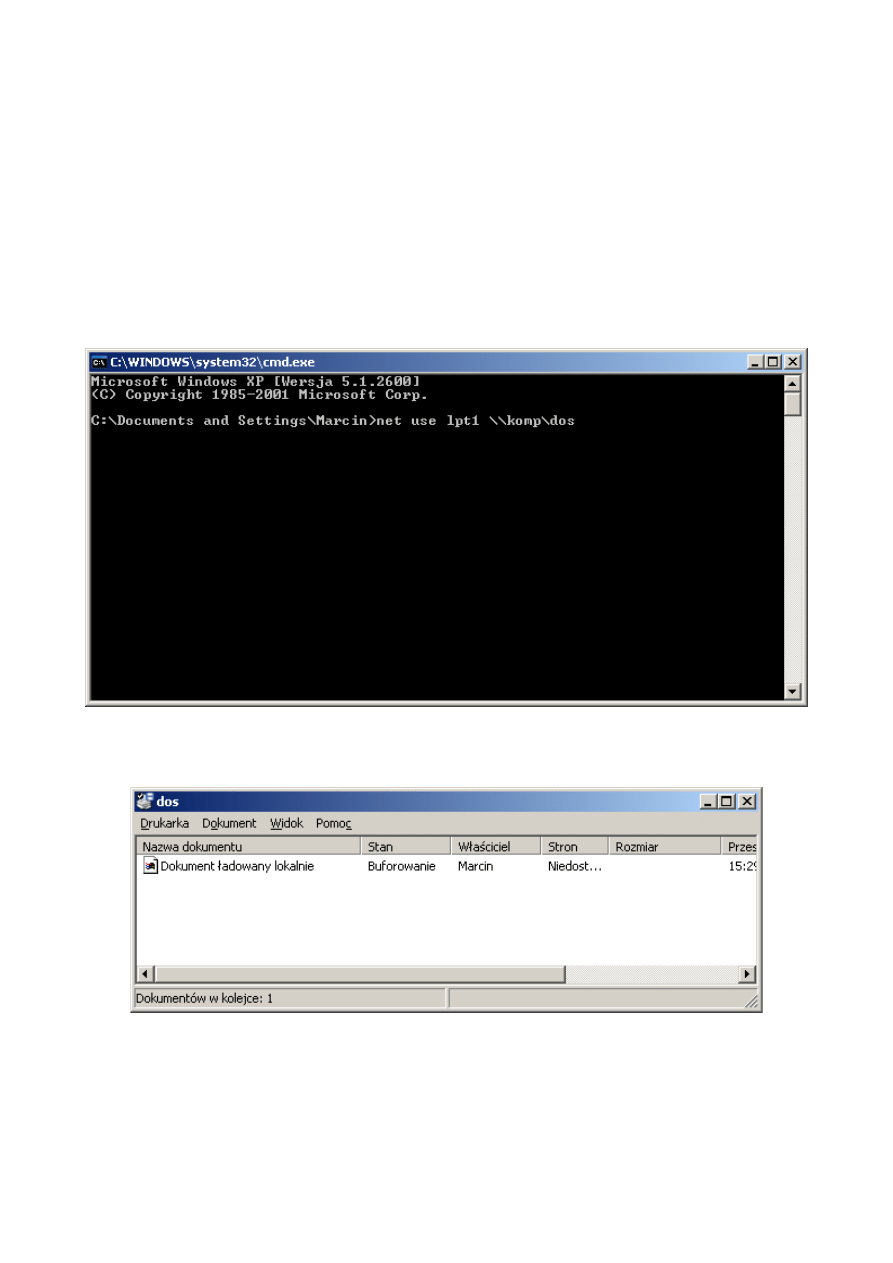
net use lpt1 \\nazwa_komputera\nazwa_drukarki
(żeby wykorzystać to polecenie w komputerze musi znajdować się aktywna karta sieciowa ! -
tzn. podłączona do sieci)
Nazwę komputera można sprawdzić we właściwościach ikony “Mój komputer”, zakładka
“Nazwa komputera” -> “Pełna nazwa komputera”. Gdyby była zbyt skomplikowana radzę
zmienić na jakąś prostą nazwę. Np. komp
Pamiętając że nasza drukarka została udostępniona jako dos, polecenie powinno wyglądać
następująco:
Uruchamiamy DosBox, a następnie PCDSP, już w tym momencie w zadaniach drukarki
powinien pojawić się plik oczekujący:
Zaprojektować filtr, i sprawdzić jego charakterystyki.
Wybrać opcje Save, nadając nazwę transformaty
18
:
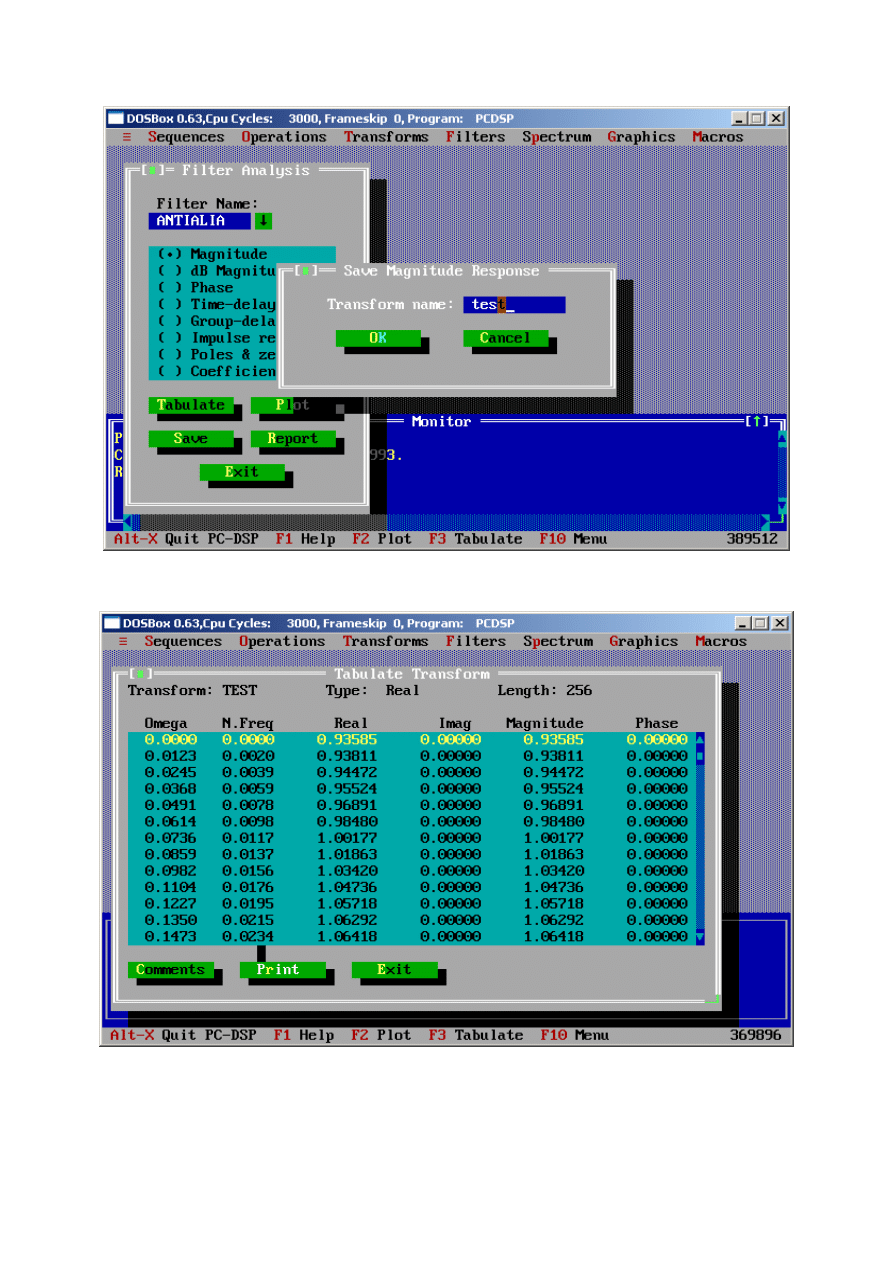
Wyjść z analizy filtru i wybrać opcje Tabulate (F3) i tam opcje Print
Po wyjściu z programu PCDSP uaktywni się okno zapisu do pliku drukarki
Materiały dydaktyczne powielane
19
Tak wygląda przykładowo wydrukowany plik (ważne kolumny to N.Freq oraz Magnitude) :
PC-DSP v2.00 - Student Edition
------------------------------
Date: Wednesday, 11/02/2005
Time: 15:40:35
Transform: TEST
Omega N.Freq Real Imag Magnitude Phase
0.0000 0.0000 0.935848 0.000000 0.935848 0.000000
0.0123 0.0020 0.938106 0.000000 0.938106 0.000000
0.0245 0.0039 0.944723 0.000000 0.944723 0.000000
0.0368 0.0059 0.955237 0.000000 0.955237 0.000000
0.0491 0.0078 0.968914 0.000000 0.968914 0.000000
0.0614 0.0098 0.984795 0.000000 0.984795 0.000000
0.0736 0.0117 1.001767 0.000000 1.001767 0.000000
0.0859 0.0137 1.018634 0.000000 1.018634 0.000000
0.0982 0.0156 1.034202 0.000000 1.034202 0.000000
0.1104 0.0176 1.047364 0.000000 1.047364 0.000000
0.1227 0.0195 1.057175 0.000000 1.057175 0.000000
0.1350 0.0215 1.062923 0.000000 1.062923 0.000000
0.1473 0.0234 1.064179 0.000000 1.064179 0.000000
0.1595 0.0254 1.060830 0.000000 1.060830 0.000000
0.1718 0.0273 1.053094 0.000000 1.053094 0.000000
0.1841 0.0293 1.041504 0.000000 1.041504 0.000000
0.1963 0.0313 1.026877 0.000000 1.026877 0.000000
0.2086 0.0332 1.010259 0.000000 1.010259 0.000000
0.2209 0.0352 0.992852 0.000000 0.992852 0.000000
0.2332 0.0371 0.975928 0.000000 0.975928 0.000000
0.2454 0.0391 0.960740 0.000000 0.960740 0.000000
0.2577 0.0410 0.948426 0.000000 0.948426 0.000000
0.2700 0.0430 0.939927 0.000000 0.939927 0.000000
0.2823 0.0449 0.935910 0.000000 0.935910 0.000000
0.2945 0.0469 0.936713 0.000000 0.936713 0.000000
0.3068 0.0488 0.942319 0.000000 0.942319 0.000000
0.3191 0.0508 0.952341 0.000000 0.952341 0.000000
0.3313 0.0527 0.966051 0.000000 0.966051 0.000000
0.3436 0.0547 0.982424 0.000000 0.982424 0.000000
Opracował dr inż. Marcin Maciążek
20
Document Outline
Wyszukiwarka
Podobne podstrony:
naprawa licznik audi 80 b3, b4, audi 100 c3, c4 (146504970) aukcje intern
FILTRY CYFROWE1
filtry cyfrowe
asb filtry cyfrowe 7
filtry cyfrowe id 171064 Nieznany
koszałka,teoria sygnałów, Filtry cyfrowe
filtry cyfrowe, CPS8, Ćwiczenie
filtry cyfrowe, Akademia Morska -materiały mechaniczne, szkoła, GRZES SZKOLA, szkoła, automaty, ayto
citroen c2 c3 c4 xsara picasso
23. Rośliny C3 i C4, biologia, licencjat eksperyment
Wyklad Filtry cyfrowe1
filtry cyfrowe, CPS7, Ćw
filtry cyfrowe, porównanie charaktrystyk filtrów FIR, Marek Korejwo
filtry cyfrowe, CPS6, Ćwiczenie 6
filtry cyfrowe, transformacje analogowo-cyfrowe, Marek Korejwo
więcej podobnych podstron