
Politechnika Rzeszowska
Rok akademicki 2012/2013
Wydział Budownictwa i Inżynierii Środowiska
Katedra Mechaniki Konstrukcji
METODY OBLICZENIOWE
Projekt nr 1
METODA RÓŻNIC SKOŃCZONYCH
Konsultował:
Wykonał:
mgr inż. Dominika Ziaja
Arkadiusz Dubiel
III BZ, LP-1
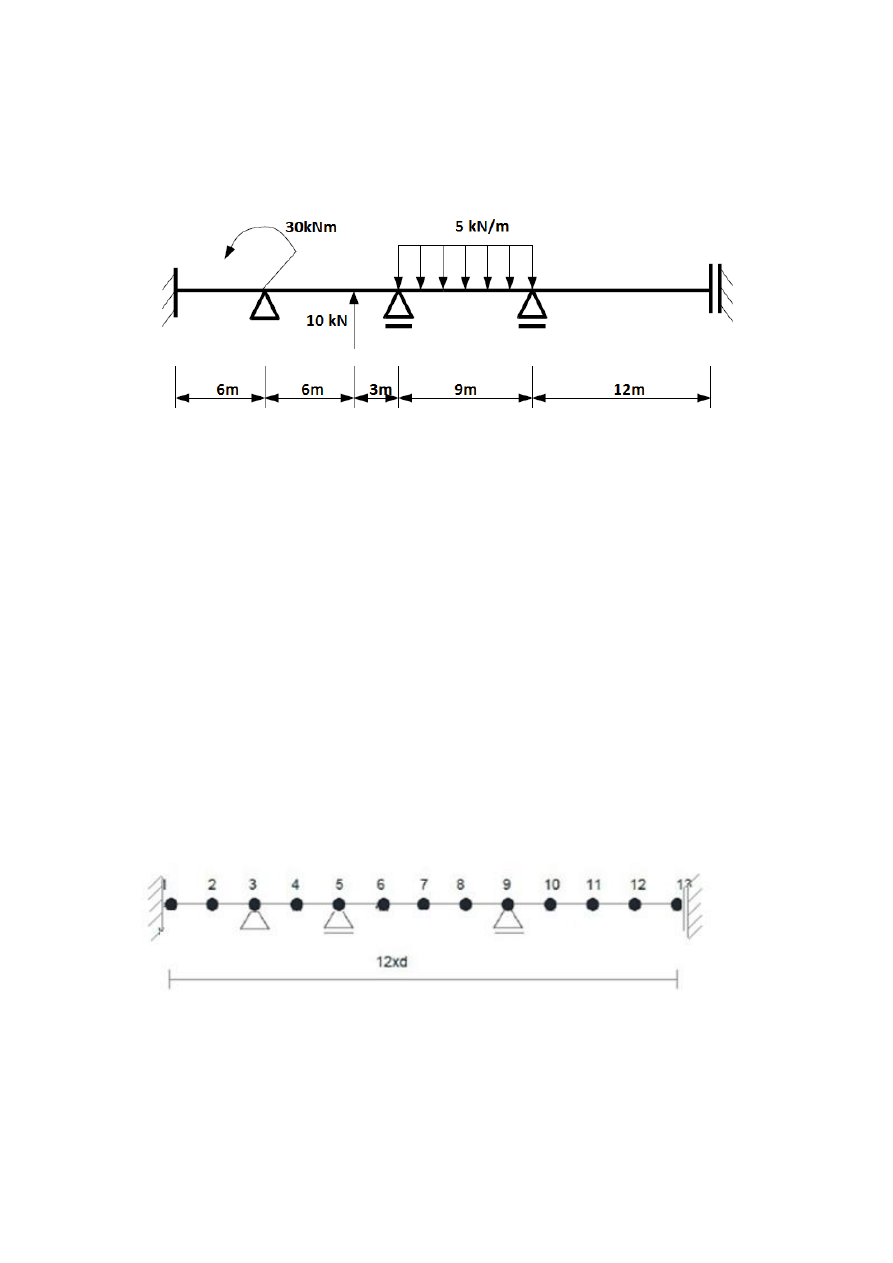
1. Schemat statyczny:
Dane:
q =5/m
P=10kN
M=30kNm
E=30*10^9N/m^2
2. Dyskretyzacja układu:
q=[0; -15000; 0; 15000;10000; -5000; -5000; -5000; -5000; 0;0;0;0;];
d = 3 m
3. Warunki brzegowe:
Dla utwiedzenia z lewej strony
Dla dwóch ostatnich równań:
wiersz 1 0;-4;0
wiersz 2 0;1;0
w
2
= 0,
w
5
= 0,
w
9
= 0,
Dla utwierdzenia przesuwnego z prawej strony:
Dla dwóch ostatnich równań:
wiersz 1 0;1;0
wiersz 2 1;-4;0
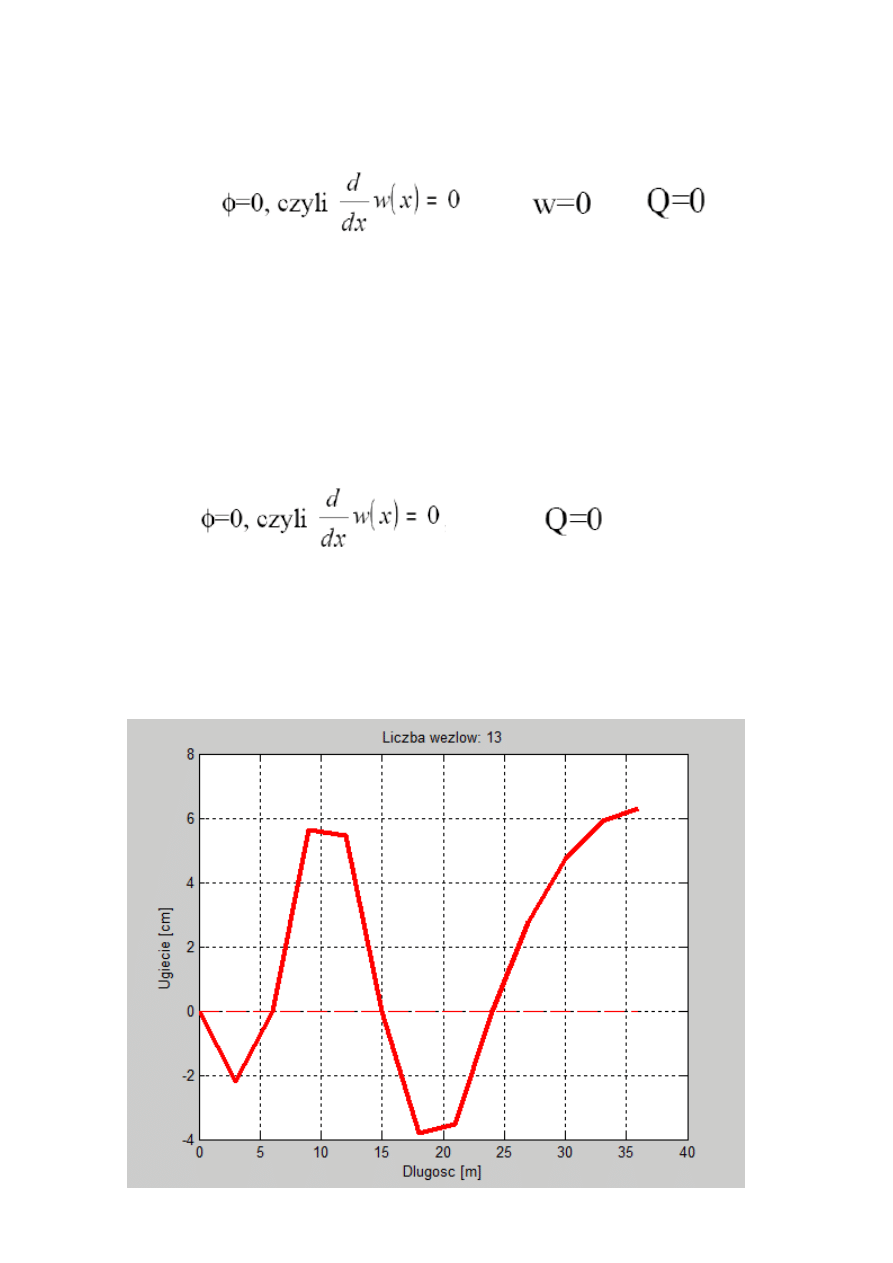
4. Wykres
ugięcia belki:

% Metoda Różnic Skończonych
% Wyznaczanie ugięcia belki
clear
all
close
all
% liczba węzłow wynosi 13 (od 0 do 12)
% lewy koniec - utwierdzenie
% prawy koniec utwierdzenie przesówne
l = 36;
% długość całej belki [m]
E = 30e9;
% moduł Younga [N/m^2]
liczba_wezlow = 13;
zerowe_ugiecie = [1 3 6 9];
niezerowe_ugiecie=1:liczba_wezlow;
% konstruowanie początkowej macierzy współczynników:
L = eye(liczba_wezlow)*6;
L(2:end,1:end-1) = L(2:end,1:end-1) - 4*eye(liczba_wezlow-1);
L(1:end-1,2:end) = L(1:end-1,2:end) - 4*eye(liczba_wezlow-1);
L(3:end,1:end-2) = L(3:end,1:end-2) + 1*eye(liczba_wezlow-2);
L(1:end-2,3:end) = L(1:end-2,3:end) + 1*eye(liczba_wezlow-2);
% a) utwierdzenie z lewej strony
L(1:2,1:3) = L(1:2,1:3) + [0 -4 0; 0 1 0];
% b) utwierzdenie przesuwne z prawej strony
L(end-1:end,end-2:end) = L(end-1:end,end-2:end) + [0 1 0; 1 -4 0];
% wektor prawych stron: h^4*q/EI
q=[0; -15000; 0; 15000; 10000; -5000; -5000; -5000; -5000; 0; 0; 0;
0;];
I= (6667e-8)*ones(13,1);
P=(l/6)^4 * (q ./ (E*I));
%% uwzglednienie zerowych ugiec
L(zerowe_ugiecie,:)=[];
L(:,zerowe_ugiecie)=[];
P(zerowe_ugiecie)=[];
niezerowe_ugiecie(zerowe_ugiecie)=[];
% L*W=P co odpowiada równaniu linii ugięcia belki: d2/dx2(EI
d2w/dx2) = q
W = inv(L)*P;
Ugiecia=zeros(liczba_wezlow,1);
Ugiecia(niezerowe_ugiecie) = W;
%% Rysunek
figure(1)
plot([0 l],[0 0],
'--r'
);
% os poczatkowa
hold
on
;
plot(0:l/12:l,Ugiecia,
'-r'
,
'linewidth'
,3);
% os odksztalcona
grid
on
title([
'Liczba wezlow: '
,num2str(liczba_wezlow)])
xlabel(
'Dlugosc [m]'
)
ylabel(
'Ugiecie [cm]'
)
Wyszukiwarka
Podobne podstrony:
Dubiel LP01 MRS 10
DubielA LP01 MRS id 144169 Nieznany
P 10 id 343561 Nieznany
dodawanie do 10 4 id 138940 Nieznany
ldm rozmaite 10 id 264068 Nieznany
I CSK 305 10 1 id 208211 Nieznany
IMG 10 id 211085 Nieznany
na5 pieszak 03 02 10 1 id 43624 Nieznany
img 10 id 211004 Nieznany
cwicz 10 F id 124010 Nieznany
IMG 10 id 210949 Nieznany
Chemia 10 3 id 111757 Nieznany
IMG 10 id 210983 Nieznany
BiolMol 10 id 87436 Nieznany
egzamin09 10 id 153651 Nieznany
ETI Semestr 5 inz 10 10 id 1644 Nieznany
więcej podobnych podstron