
ROZRUCH SILNIKA SYNCHRONICZNEGO Z
ZASTOSOWANIEN STEROWNIKA SIMATIC
WSTĘP
Rozruch silnika synchronicznego składa się więc z dwóch etapów. Najpierw doprowadzamy
silnik do prędkości bliskiej prędkości synchronicznej, a następnie wprowadzamy silnik w
synchronizm. Pierwszy etap odbywa się sposobem asynchronicznym przy wykorzystaniu
klatki rozruchowej. Rozruch asynchroniczny silnika synchronicznego przeprowadzamy
podobnie jak rozruch silnika klatkowego. Silnik uruchamiamy przez włączenie do sieci
poprzez dławiki ograniczając w ten sposób prąd rozruchowy. W okresie rozruchu
asynchronicznego uzwojenie wzbudzenia silnika synchronicznego zwieramy przez rezystor
ochronny R
0
= 10 R
wzb.
Pozostawienie uzwojenia wzbudzenia w stanie rozwartym podczas
rozruchu mogłoby doprowadzić do jego uszkodzenia na skutek indukowania się w uzwojeniu
dużego napięcia w pierwszej fazie rozruchu. Zwarcie uzwojenia wzbudzenia rezystancją
ochronną powoduje zniekształcenie charakterystyki mechanicznej silnika.
Na wał silnika synchronicznego w czasie rozruchu asynchronicznego działają następujące
momenty:
• Moment pochodzący od klatki rozruchowej (przebieg tego momentu w funkcji
prędkości jest zależny od rezystancji klatki rozruchowej)
• Moment od składowej zgodnej pola magnetycznego wytworzonego przez prąd
płynący w uzwojeniu wzbudzenia zwartym przez rezystancje.
• Moment od składowej przeciwnej pola
• Moment reluktancyjny (występuje tyko w silnikach wykonanych w wersji
jawnobiegunowej)
• Moment synchroniczny (występuje w ostatniej fazie rozruchu asynchronicznego w
momencie załączenie prądu wzbudzenia do tegoż uzwojenia)
Po odłączeniu dławików i uzyskaniu przez silnik prędkości bliskiej synchronicznej w
obwodzie wzbudzenia odłączany jest rezystor ochronny a włączane napięcie stałe i silnik
wchodzi w synchronizm.

INSTRUKCJA
DANE MASZYN:
Silnik synchroniczny
P
N
= 10 kW
U
wzb
= 80 V
I
wzb
= 9,4 A
U
N
= 400 V
I
N
= 11,6 A
n = 1500 obr/min
Prądnica prądu stałego
P
N
= 10 kW
U
N
= 125 V
I
N
= 80 A
n
N
= 1750 obr/min
R
Tw
= 0,128 Ω
I
f
= 3 A
U
f
= 125 V
R
f
= 43,2 Ω
1.
Zapoznanie się z instrukcją sterownika programowalnego SIMATIC S5-95U
Zapoznać się z budową, działaniem i oprogramowaniem sterownika programowalnego
SIMATIC S5-95U.
2.
Układ pomiarowy
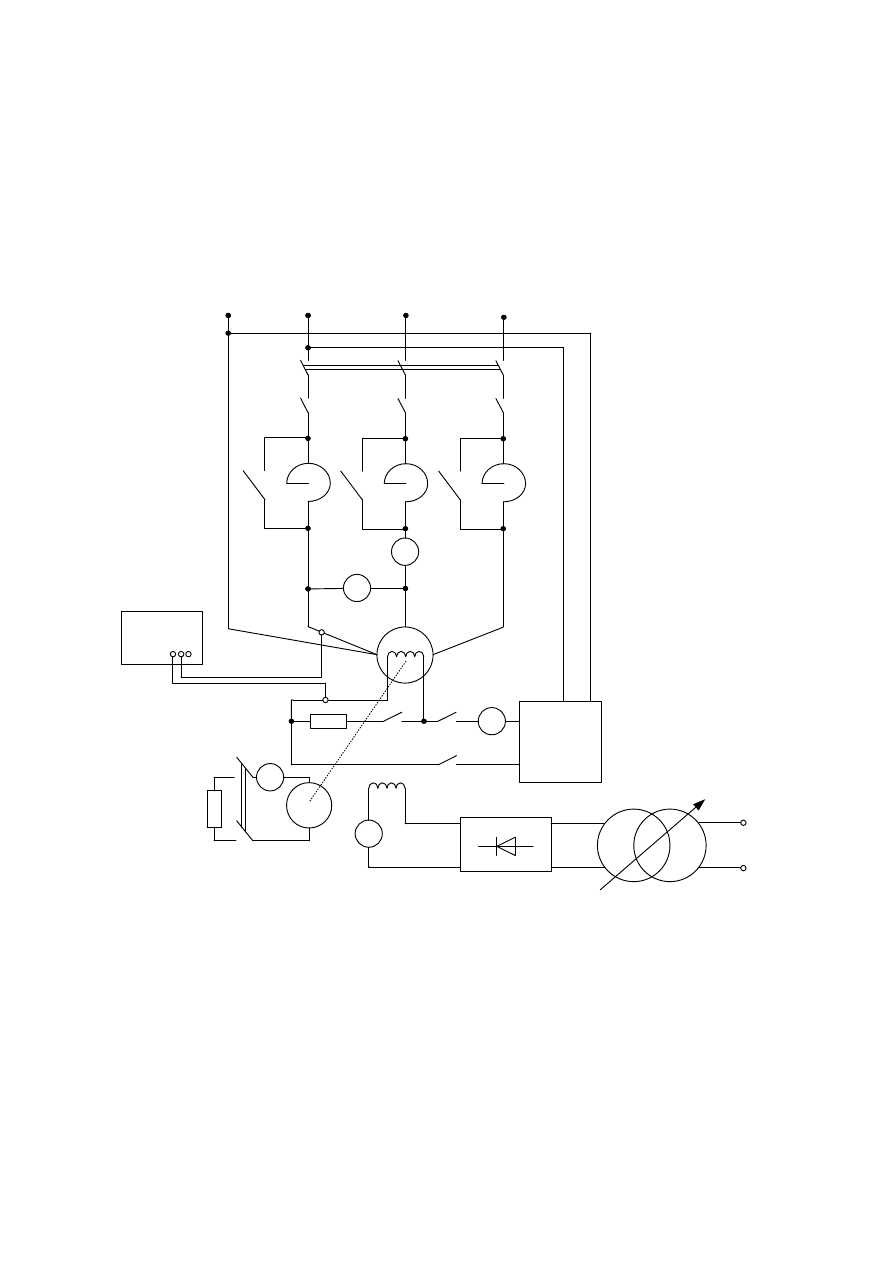
Zapoznać się z układem pomiarowym automatycznego rozruchu silnika synchronicznego z
zastosowaniem sterownika programowalnego SIMATIC S5-95U jak na rysunku 1.
Opis działania układu
Schemat układu do automatycznego rozruchu silnika synchronicznego jest przedstawiony na
rys.1. Po wczytaniu programu do sterownika SIMATIC następuje załączenie stycznika K4.
Stycznik K4 zwiera uzwojenie wzbudzenia przez rezystor ochronny R0. Układ jest gotowy do
rozruchu. Po naciśnięciu przycisku START następuje załączenie stycznika K1, miga też
zielona lampka co ma sygnalizować iż silnik jest w fazie rozruchu asynchronicznego.
Stycznik K1 załącza do sieci obwód stojana silnika poprzez dławiki (Dł.) ograniczające prąd
rozruchowy. Stycznik K2 służy do eliminacji dławików ograniczających prąd rozruchowy
silnika. Załączenie stycznika K2 przeprowadzone jest w funkcji prędkości silnika. Wartość
prędkości silnika przy której nastąpi eliminacja dławików określa się na podstawie przebiegu
charakterystyki mechanicznej silnika tak, aby eliminacja dławików nastąpiła dla poślizgu
mniejszego od poślizgu krytycznego. Pomiar prędkości silnika dokonywany jest przy pomocy
enkodera zainstalowanego na wale silnika. Po osiągnięciu prędkości podsynchronicznej
następuje jednoczesne wyłączenie stycznika K4 (odłączenie rezystora R0) i załączenie
stycznika K3. Stycznik K3 załącza prąd wzbudzenia i powoduje wejście silnika w
synchronizm. Po wejściu silnika w synchronizm zielona lampka świeci na stałe.
Atr
~230V
+
-
~
V
Sonda
prądowa
A
Oscyloskop
cyfrowy
R0
H
R
A
H
WR2
K4
A
+
-
Prostownik
M
K3
K3
A
K2
Dł
K1
K2
Dł
K1
K2
Dł
K1
WR1
L1
L2
L3
N
Sonda
prądowa
Rys.1. Schemat układu do automatycznego rozruchu silnika synchronicznego
Naciśnięcie przycisku STOP w stanie pracy silnika jak i w fazie rozruchu powoduje
natychmiastowe wyłączenie styczników i przerwanie cyklu pracy (rozruchu) silnika. Program
sterujący układem zabezpiecza silnik przed długotrwałą pracą asynchroniczną w funkcji
czasu. Jeżeli w określonym czasie (ok. 50% większy niż całkowity czas rozruchu silnika
synchronicznego) nie nastąpi wejście w synchronizm rozruch zostanie przerwany (odłączenie
silnika od sieci) i zapali się czerwona lampka AWARIA. W przypadku zapalenia lampki

AWARIA reset programu nastąpi po naciśnięciu przycisku STOP co zasygnalizuje lampka.
W przypadku braku pewności co do aktualnej fazy w jakiej znajduje się obrabiany program
należy wcisnąć przycisk STOP celem zresetowania programu i przygotowaniu układu do
pracy.
3.
Obliczenie R0
Na podstawie danych silnika synchronicznego obliczyć wartość rezystora R0.
4.
Program ćwiczenia:
Zarejestrować przebiegi czasowe prądu stojana i(t) i prądu wzbudzenia i
w
(t)
:
- dla obliczonej nastawy R0 i rozruchu na biegu jałowym silnika;
- dla obliczonej nastawy R0 i rozruchu z obciążeniem (przy zamkniętym WR2);
- dla zmniejszonej nastawy R0/2 i rozruchu na biegu jałowym silnika;
- dla zmniejszonej nastawy R0/2 i rozruchu z obciążeniem (przy zamkniętym WR2);
- dla obliczonej nastawy R0 a zmienionej nastawy dławika i rozruchu na biegu jałowym
silnika;
- dla obliczonej nastawy R0 a zmienionej nastawy dławika i rozruchu z obciążeniem (przy
zamkniętym WR2);
5.
Sprawozdanie
W sprawozdaniu należy umieścić:
1. Parametry badanego układu pomiarowego.
2. Schemat pomiarowy badanego układu.
3. Zarejestrowane przebiegi czasowe z zaznaczonym i określonym czasem zadziałania
poszczególnych styczników.
4. Własne wnioski i spostrzeżenia.
6.
Pytania kontrolne
1.
Omówić rozruch asynchroniczny silnika synchronicznego.
2.
Porównać wady i zalety układów sterowania stykowych i opartych na sterownikach.
3.
Omówić działanie układu laboratoryjnego automatycznego rozruchu silnika
synchronicznego.
4.
Omówić role sterownika programowalnego SIMATIC w automatycznym rozruchu silnika
synchronicznego.
Wyszukiwarka
Podobne podstrony:
Wykres dla rozruchu silnika synchronicznego
Automatyczny rozruch gwiazda-trójkąt silnikaindukcyjnego, CWICZ9, Ćwiczenie 9
Automatyczny rozruch gwiazda-trójkąt silnikaindukcyjnego, GWIAZDA-TRÓJKĄT, SPRAWOZDANIE
Automatyczny rozruch gwiazda-trójkąt silnikaindukcyjnego, POLITECHNIKA RADOMSKA
rozruch silnika klatkowego, wojtek studia, Automatyka, studia 2010
Automatyczny rozruch gwiazda-trójkąt silnikaindukcyjnego2, POLITECHNIKA RADOMSKA
KIA Sportage trudny rozruch silnika zima
SILNIK SYNCHR., CHARAKTERYSTYKI POITIER'A DLA POBRANEJ MOCY CZYNNEJ :
karolewski, maszyny energetyczne L, Układy rozruchowe silników indukcyjnych klatkowych
dudziński,układy napędowe,Rozruch silników indukcyjnych pierścieniowych
Kopia Automatyczny rozruch gwiazda trójkąt
Silnik synchroniczny , info
V semestr, cwiczenie koncowe - Piotr Zając, TEMAT: Silniki synchroniczne
V semestr, cwiczenie koncowe - Piotr Zając, TEMAT: Silniki synchroniczne
rozruch silnika trójfazowego
opel frontera trudny rozruch silnika
P1, Zaprezentowano koncepcję badania sygnałów akustycznych stanów przedawaryjnych silnika synchronic
więcej podobnych podstron