1
Techniczne rodki automatyzacji
Edward Tertel
dr in .
WYK AD
AUTOMATYZACJA POPRZEZ
ROBOTYZACJ
2
Historia ROBOTÓW
Lata 50-te i 60-te
– rozwój technik komputerowych oraz technik
sterowania.
Powstaje pytanie: czy komputer jest robotem?
Powstaj pierwsze roboty przemys owe.
1956
– Pierwsze prace nad po czeniem mo liwo ci percepcji oraz
umiej tno ci rozwi zywania problemów przez roboty przy u yciu
komputerów, kamer oraz sensorów dotyku. Celem jest budowa
robotów zdolnych do dzia
inteligentnych. Powstaje nowa
dyscyplina naukowa: sztuczna inteligencja (A.I.).
3
Historia ROBOTÓW
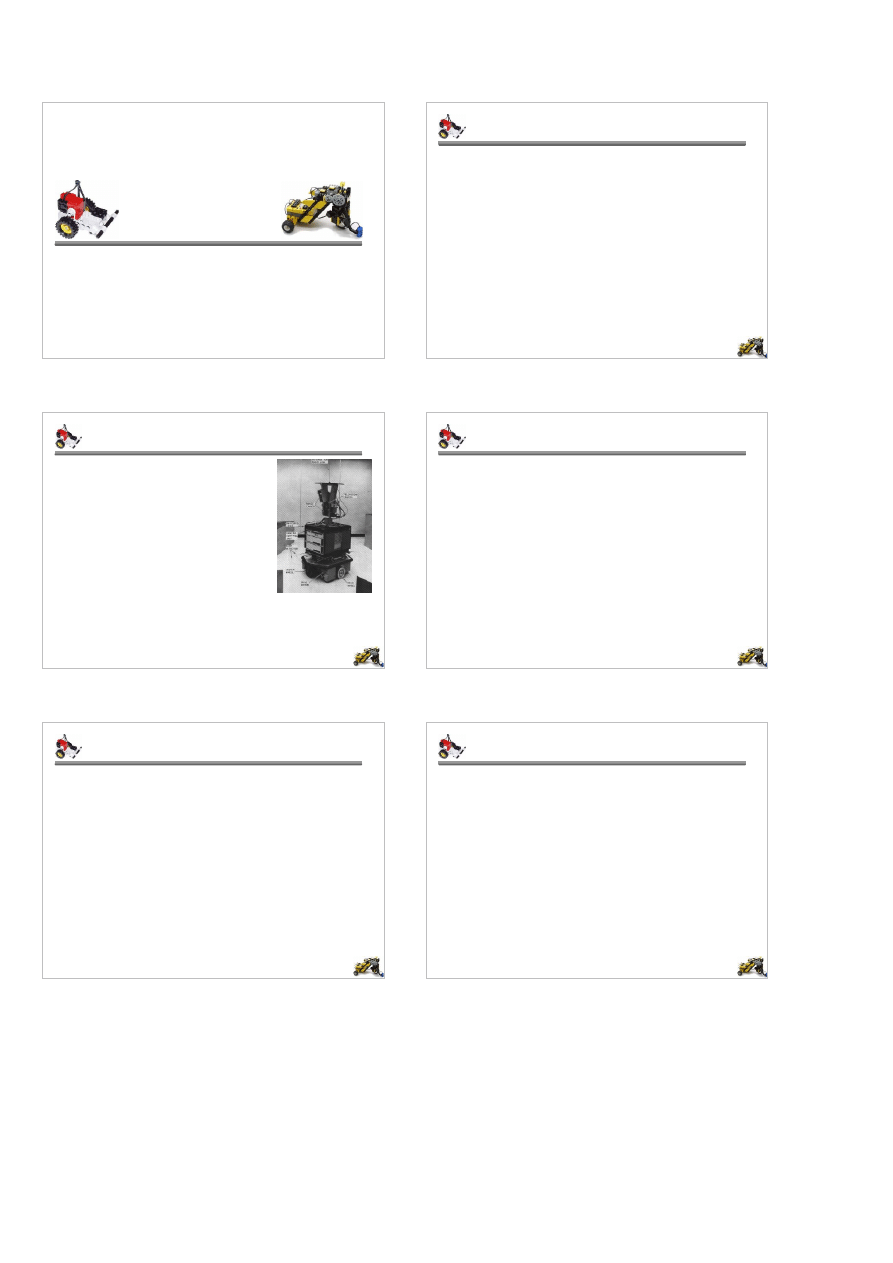
1960
– Robot Shakey wykonany w Stanford
Research Institute. Zawiera kamer
telewizyjn , dalmierz, procesor dzia
logicznych, sensory dotyku, urz dzenia
czno ci radiowej. Shakey móg by zdalnie
kontrolowany przez komputer.
1973
– Pierwszy komercyjny robot
przemys owy sterowany komputerem,
zbudowany przez Richarda Hohna z firmy
Milacron.
4
Czym jest ROBOT?
• Dawniej
– „Inteligentne” mechaniczne urz dzenie – automat
• Wg. Robotics Industry Association, 1985
– “Programowalny, wielofunkcyjny manipulator
zaprojektowany do przemieszczania materia ów, cz
ci,
narz dzi, i innych urz dze w ramach wykonywania
ró nych zada ”
• Wg. Japanese Industrial Robot Association (JIRA)
– “Urz dzenie posiadaj ce stopnie swobody, które mo na
kontrolowa .”
5
Czym jest ROBOT?
• Wg. ISO
– “...jest automatycznie sterowan , programowaln ,
wielozadaniow maszyn manipulacyjn o wielu
stopniach swobody, posiadaj
w asno ci
manipulacyjne, lub lokomocyjne, stacjonarna lub
mobiln , dla wa nych zastosowa przemys owych”
• Wg. Encyklopedi powszechnej PWN
– “Urz dzenie (maszyna) przeznaczone do realizacji
niektórych czynno ci manipulacyjnych, lokomocyjnych,
informacyjnych i intelektualnych cz owieka.”
6
Czym jest ROBOT?
Powy sze definicje pomijaj takie poj cia jak:
my lenie, rozumowanie, rozpoznawanie,
analizowanie, rozwi zywanie problemów,
emocje, zmys y, wiadomo
.
7
Czym jest ROBOT?
• …
maszyna
zdolna do pozyskiwania
informacji
z jej
rodowiska pracy i wykorzystywania tych informacji do
bezpiecznego, celowego i skutecznego dzia ania,
(Ron Arkin, 1998).
• …
autonomiczny
system, który wyst puje w
rzeczywistym
fizycznym rodowisku
, potrafi cy
rozpoznawa to rodowisko oraz dzia
w nim w
sposób nakierowany na osi gni cie okre lonego celu.
8
Czym jest ROBOT?
…jednak do dzi nie ma jednej, spójnej
ogólnie przyj tej definicji
czym jest ROBOT
9
Klasy ROBOTÓW?
• Japanese Industrial Robot Association (JIRA)
wprowadzi o podzia robotów na 6 klas:
– Klasa 1 : Urz dzenia sterowane r cznie,
– Klasa 2 : Roboty pracuj ce sekwencyjnie (
jedna sekwencja czynno ci
),
– Klasa 3 : Roboty pracuj ce sekwencyjnie (
mo liwo
zmiany sekwencji
czynno ci
)
,
– Klasa 4 : Roboty odtwarzaj ce czynno ci,
– Klasa 5 : Roboty sterowane numerycznie,
– Klasa 6 : Roboty „inteligentne”.
10
Klasy ROBOTÓW?
• Klasy robotów ze wzgl du na rodzaj i mo liwosci sterowania
robotem:
– Klasa 1 : Robot sekwencyjny: (sekwencyjny uk ad sterowania, kolejno
zaprogramowane ruchy i czynno ci)
– Klasa 2 : Robot realizuj cy zadane trajektorie (realizuje ruchy sterowane wg
programu specyfikujacego
dane pozycje oraz predko ci ruchów),
– Klasa 3 : Robot adaptacyjny (adaptacyjny uk ad sterowania wspó pracuj cy z
elementami sensoryki lub z uk adem ucz cym, zdolny do pozyskiwania
informacji zewn trznych, ich analizy i wykorzystywania do zmiany swoich
ciwo ci-programu)
,
– Klasa 4 : Teleoperator (sterowanie zdalne, przenoszenie na odleg
funkcji
motorycznych i sensorycznych)
11
Klasy ROBOTÓW?
• Generacje robotów wyró nia si ze wzgl du na
sposób programowania i mo liwo ci
komunikowania si z otoczeniem:
– I generacja: roboty nauczane,
– II generacja: roboty ucz ce si ,
– III generacja roboty inteligentne.
12
Czym jest ROBOTYKA?
Robotyka
jest nauk o robotach, autonomicznych
systemach wchodz cych w interakcje z otaczaj cym
wiatem fizycznym.
Robotyka
zajmuje si
percepcj
,
interakcj
oraz
dzia aniem
ROBOTÓW, w fizycznym wiecie.
13
... manipulacyjne
14
ROBOTY przemys owe
Sterowanie prac robota przemys owego polega na
kierowaniu ruchami jego ramienia roboczego na podstawie
wcze niej przeprowadzonych oblicze i symulacji.
PODSTAWOWE CECHY:
• Programowanie poprzez „uczenie”,
• Powtarzaj ce si czynno ci,
• Du e pr dko ci,
• Niewiele czujników percepcyjnych,
• Du a precyzja ruchów,
• Sta e trajektorie ruchów,
• Brak bezpo redniego wspó dzia ania z lud mi.
15
Stopnie swobody robota
Ka de
po czenie
ogniw
ruchomych
robota oraz
ka da
mo liwo
ruchu
liniowego
ramienia jest
rozpatrywana
jako stopie
swobody
Ka dy mo liwy do zrealizowania kierunek ruchu liniowego
oraz obrotowego stanowi stopien swobody.
16
Stopnie swobody robota
Jednostki kinematyczne robotów zbudowane s w
postaci szeregowego uk adu cz onów po czonych
ruchowo za pomoc tzw. par kinematycznych.
Wyró nia 5 klas par kinematycznych. Numer klasy
okre la ilo
wi zów wywo anych po czeniem pary
kinematycznej. Odejmuj c od 6-u dof. cia a
swobodnego, ilo
na
onych wi zów uzyskuje si
ilo
stopni swobody w danym po czeniu pary
kinematycznej
.
Aktualnie w konstrukcjach robotów przemys owych
znaczenie praktyczne maj pary kinematyczne klasy
piatej, pozostawiaj ce jeden stopien swobody (ruch
post powy, lub obrotowy).
17
Stopnie swobody robota
Liczba stopni swobody:
n- liczba par kinematycznych,
pi- liczba par kinematycznych klasy i,
i- klasa pary kinematycznej.
5
1
6
i
i
ip
n
w
18
Stopnie swobody robota
Proste zadanie kinematyki robota:
Pozycja ko ca efektora jest ustalana na podstawie
pozycji cz onów w poszczególnych parach
kinematycznych.
Odwrotne zadanie kinematyki robota:
Na podstawie wymaganej pozycji ko ca efektora ustala
si odpowiednie przemieszczenia w poszczególnych
parach kinematycznych.
19
Powody stosowania robotów
przemys owych
• Niebezpieczne rodowisko pracy,
• Powtarzalne cykle pracy,
• Skomplikowane dzia ania manipulacyjne,
•
one przemieszczanie elementów,
• Celem dzia ania jest precyzyjne pozycjonowanie i
zorientowanie cz
ci.
20
Typowe obszary zastosowa
robotów przemys owych
• Manipulacje materia ami,
• Przenoszenie materia ów,
• Za adunek i roz adunek i uzbrajanie maszyn,
• Zgrzewanie punktowe,
• Operacje spawalnicze,
• Malowanie natryskowe,
• Monta ,
• Kontrola.
21
ROBOTY autonomiczne
Sterowanie prac robota autonomicznego polega na
po czeniu kilku rodzajów ró nych dzia
:
• W
ciwe zamodelowanie mechanizmów
(kinematyka, dynamika),
• Niezawodne sterowanie elementami
wykonawczymi,
• Planowanie ró nych cie ek ruchów dla ró nych
zada ,
• Integracja percepcji, selekcja i wspó dzia anie
ró nych typów sensorów
• Elastyczne uk ady steruj ce (dostosowywanie
do nowych sytuacji).
22
Z czego sk ada si ROBOT?
• Pary kinematyczne z uk adami nap dowymi
– Stosowane do przemieszczania i manipulacji,
• Efektory,
– Odzia ywuj ce na obiekt,
• Czujniki,
– Zbieraj ce informacje o otoczeniu,
• Uk ady steruj ce integruj ce powy sze systemy,
– Generuj odpowiednie sygna y do nap ów i efektorów na
podstawie danych zebranych z czujników.
23
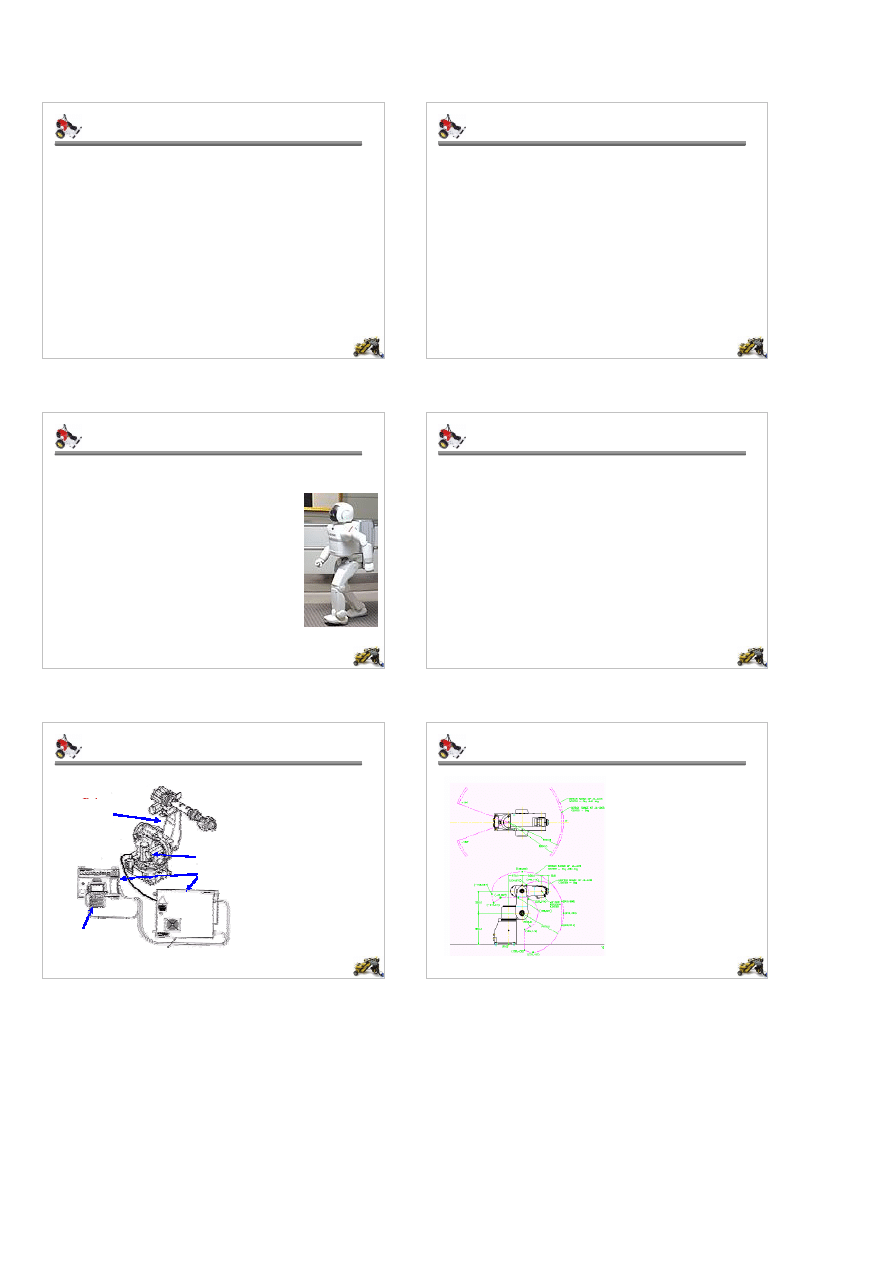
Elementy robota przemys owego
Serwonap dy
Systemy sterowania
czny element
steruj cy
(programuj cy)
Ramie
robota
Robot przemys owy
zawiera zespó
mechanicznych i
elektrycznych
elementów
dzia aj cych jako
system.
Uk ad sterowania
zawiera system
operacyjny oraz
oprogramowanie
okre laj ce dzia anie
systemu robota oraz
jego wewn trzn
komunikacj
24
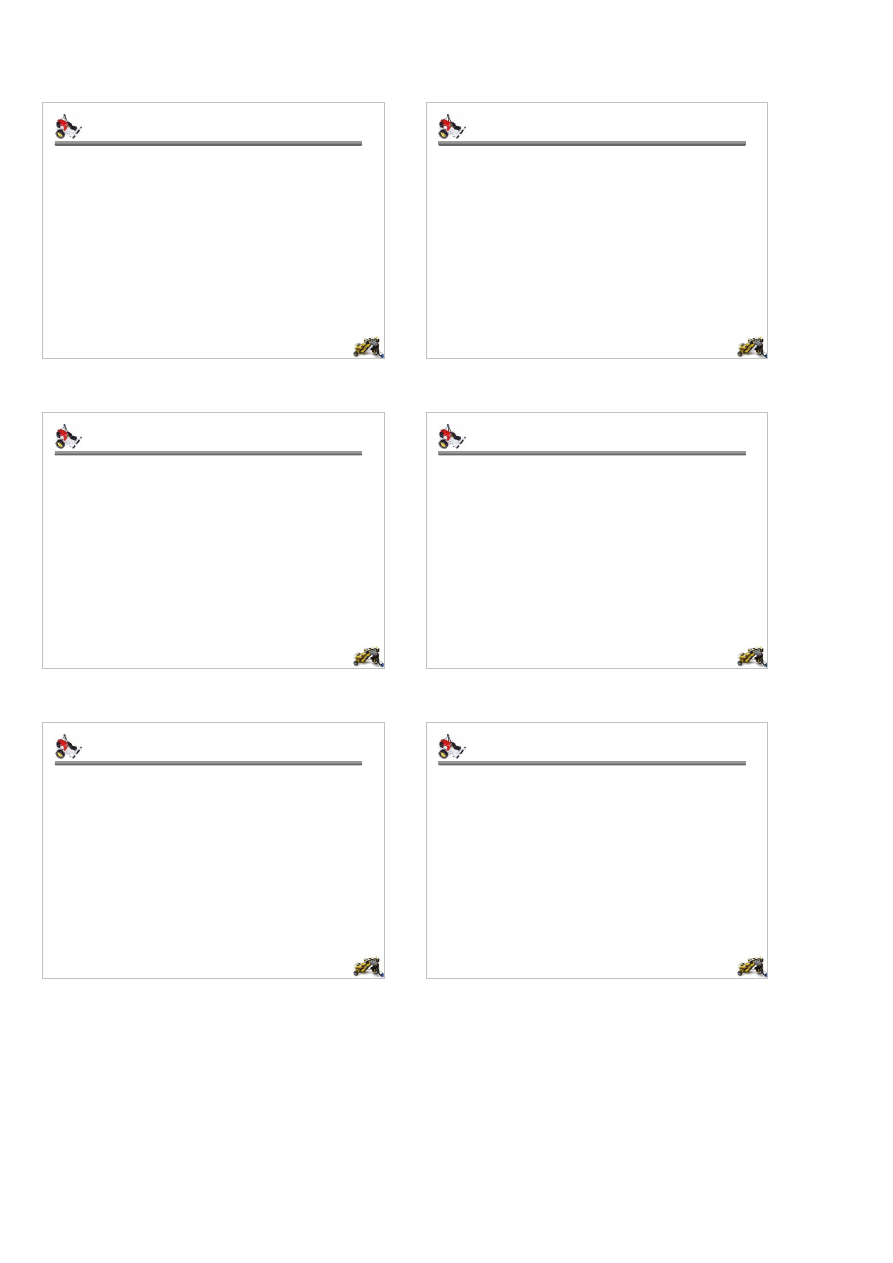
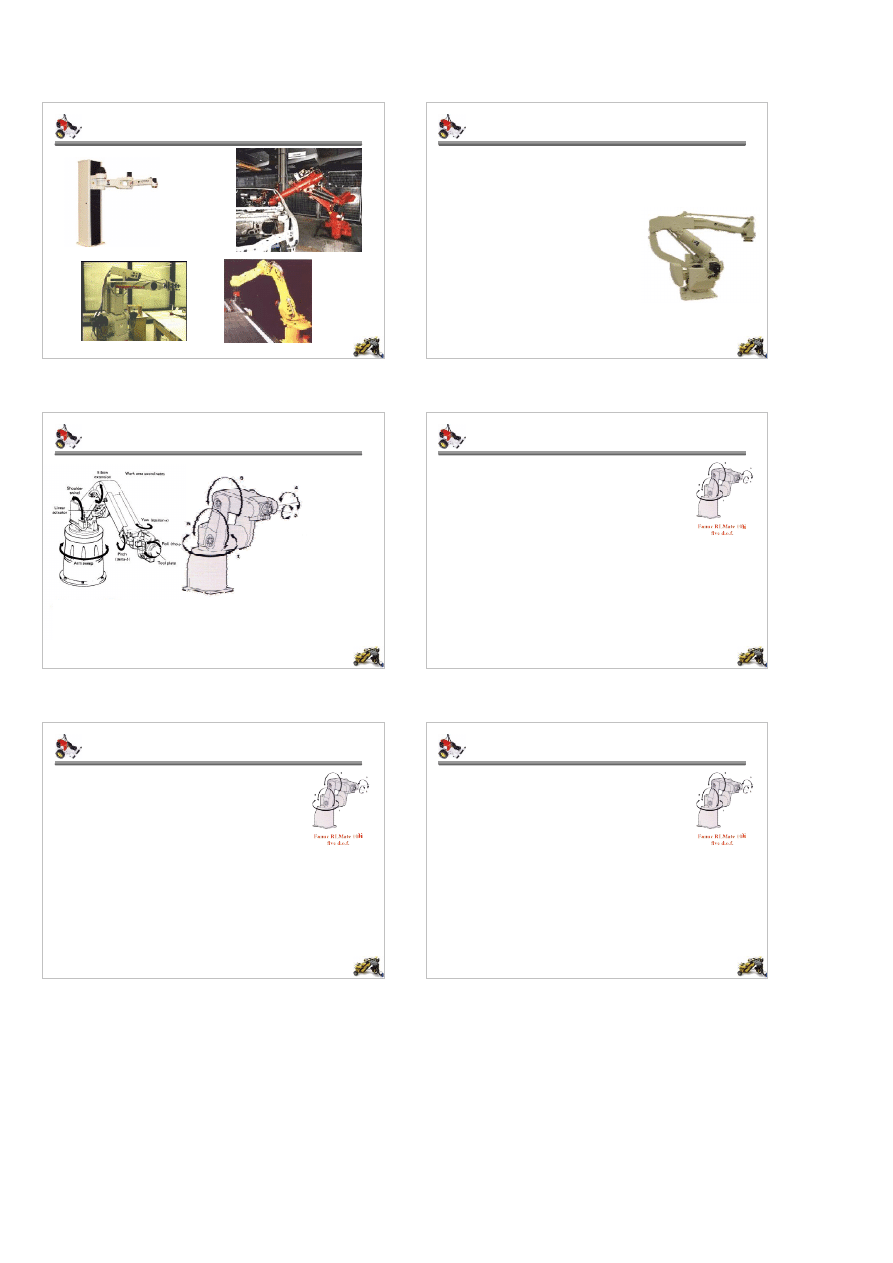
Przestrze robocza robota
przemys owego
Wielko
(zakres)
obszaru, w którym mo e
operowa efektor robota
przemys owego jest
nazywany jego
przestrzenia robocz .
Przestrze robocza robota Fanuc RLMate 100i.
25
Czujniki
• Czujnik (sensor) = urz dzenie dostarczaj ce informacji z
otoczenia robota
– Powy szy proces jest nazywany
percepcj
• Jakiego rodzaju danych z otoczenia potrzebuj roboty?
– Jest to zale ne od zada jakie maj w tym otoczeniu
wykona .
• Obszar percepcji
– mo liwe dane do zarejestrowania przez czujniki,
– czasami konieczne jest „
zobaczenie
” rodowiska
„oczami” robota,
– rozszerza si wyra nie wraz ze wzrostem ilo ci czujników.
26
Elementy ruchu robota
• Efektory
: urz dzenia poprzez które robot
oddzia uje na otoczenie.
• Elementy nap dowe
: urz dzenia umo liwiaj ce
efektorom wykonywanie ich zada
(silniki, si owniki,
przek adnie, serwomechanizmy)
• Zadania elementów nap dowych:
– Przemieszczanie robota,
– Manipulacje (przenoszenie elementów).
• Wg powy szego roboty mo na podzieli na
– Roboty mobilne, autonomiczne,
– Zrobotyzowane manipulatory.
27
Autonomia robotów
Autonomia jest zdolno ci do podejmowania w asnych
decyzji oraz dzia ania wed ug nich.
W przypadku robotów: podejmowanie w
ciwych
dzia
w zastanej sytuacji.
Autonomia mo e by ca kowita lub cz
ciowa.
Sterowniki pozwalaj na autonomi robotów poprzez:
• pozyskiwanie danych z otoczenia (sensory),
• przetwarzanie i wymiana informacji,
• podejmowanie decyzji o rodzaju i kolejno ci dzia
,
28
Jezyki programowania robotów
• Nie ma najlepszego j zyka programowania robotów !
• Przyczyny stosowania okre lonego j zyka:
– Najlepiej nadaje si do opisu zadania,
– Jest do czony do sprz tu,
– Jest znany przez osob programuj
robota.
•
zyki ogólnego przeznaczenia:
– JAVA, C
•
zyki specjalnego stosowania:
29
Podej cia w sterowaniu robotów
• Sterowanie robotem oznacza koordynacj sygna ów
odbieranych z otoczenia poprzez czujniki z
odpowiednim dzia aniem elementów wykonawczych
• Sterowanie robotem mo e by prowadzone:
– Sprz towo (hardware): programowalna logika
– Programowo (software).
30
• Sterowanie bezpo rednie,
– bez analizy stanu, okre lona kolejno
dzia
.
• Sterowanie po rednie (planowanie dzia
)
– dzia anie poprzedzone analiz stanu.
• Hybrydowe systemy sterowania
Podej cia w sterowaniu robotów
31
Kryteria doboru architektury
sterowania
• Dobieraj c sposób sterowania nale y bra pod uwag rodzaj
robota, rodzaj zadania oraz charakterystyk otoczenia, a w
szczególno ci:
– Jakie i ile sygna ów jest odbieranych z otoczenia?
– Czy charakter otoczenia jest statyczny, czy zmienny?
– Czy wszystkie istotne sygna y s odbierane przez robota?
– Jaka jest wymagana szybko
detekcji sygna ów oraz szybko
dzia ania?
– Czy robot powinien pami ta poprzednie stany (histori )?
– Czy robot powinien przewidywa stany przysz e (unikanie b dów)?
– Czy robot powinien oddzia ywa na otoczenie, aby umo liwi
wykonanie okre lonych dzia
?
32
PODSUMOWANIE
• Roboty znajduj coraz szersze zastosowanie w wielu
rodowiskach (przemys , transport, dom, medycyna)
• Aktualny rozwój robotyki jest nakierowany na:
– podniesienie skuteczno ci komunikacji robota z otoczeniem,
– zwi kszanie poziomu autonomiczno ci robotów,
– Upraszczanie metod programowania robotów.
Wyszukiwarka
Podobne podstrony:
= iso 8859 2 Q T=A6A 3 id 36655 Nieznany
= iso 8859 2 Q T=A6A 1 id 36654 Nieznany (2)
= iso 8859 2 Q T=A6A 5 id 36656 Nieznany
KZ = iso 8859 2 q Wyk=B3ad = 2010
KZ = iso 8859 2 q Wyk=B3ad = 2018
LEKI P-ISO-8859-2QGRUACLICZE, farmacja III, farmacja, farmakologia
LEKI PRZECIWGRZYBICZE-ISO-8859-2QpielEAgn, farmacja III, farmacja, farmakologia
LEKI PRZECIWWIRUSOWE-ISO-8859-2QpielEAgn, farmacja III, farmacja, farmakologia
iso 8859 2''Wyk B3ady
ISO 8859 2''Przyk�ady
KZ = iso 8859 2 q Wyk=B3ad = 2007
KZ = iso 8859 2 q Wyk=B3ad = 2008
iso 8859 1''NOWE ROZPORZĄDZENIE
= iso-8859-2 Q Wyk=B3ad7, dietetyka
KZ = iso 8859 2 q Wyk=B3ad = 2002
=iso 8859 2QSCHEMAT KONCOWY =AFywienie
więcej podobnych podstron