1. Dana jest ('prosta'!) macierz![]()
. Opisz podprzestrzenie Ker(A) i Im(A).
Zgodnie z definicją:
![]()
![]()
Jeśli mamy przykładowo macierz

to procedura postępowania jest następująca:
a) Ker A
Szukamy wszystkich x =![]()
takich, że Ax=![]()

b) Im A
Szukamy wszystkich y =![]()
takich, że y=Ax, gdzie x=![]()

stąd:
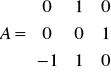
2. Dana jest ('prosta'!) macierz ![]()
. Wyznacz wymiar podprzestrzeni Ker(A) i Im(A).
Wiadomo, że jeśli ![]()
to dim(Im(A)) + dim(Ker(A)) = n
wtedy: dim(Im(A)) = rankA
Jeśli więc będzie dana macierz A np.: 
to mamy:
Wyznaczamy rankA. (rząd macierzy to wymiar największej macierzy kwadratowej o niezerowym wyznaczniku)
Zauważmy, że: det(A)=12-6-2+9=13 wtedy rankA=3
dim(ImA)=3
dim(KerA)=0
3. Niech ![]()
. Czy mogą obowiązywać następujące relacje:
a) dim Im(A) = 0
TAK ![]()
np. ![]()
b) dim Ker (A) = 0
TAK ![]()
np. ![]()
. Zatem ![]()
c) ![]()
TAK ![]()
np. ![]()
d) ![]()
TAK ![]()
np. ![]()
e) Ker(A)=Im(A)
TAK ![]()
np.
f) Ker(A)=∅
NIE ![]()
z definicji Ker(A) jest podprzestrzenią Rn więc musi zawierać przynajmniej element zerowy.
g) Im(A)=Rn
TAK ![]()
np. A=In
h) Ker(A)=Rn
TAK ![]()
np. A=0
i) ![]()
TAK ![]()
np. 
4.Wyznacz model w przestrzeni stanu na podstawie zadanego (prostego!) schematu symulacyjnego oraz równania różniczkowego.
a)
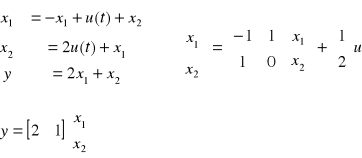
b)
![]()
przechodzimy na transformatę Laplace'a:
[α[f(n)(t)]=snF(s)-sn-1f(0+)-sn-2f'(0+)-…-f(n-1)(0+)]
=>x''(t)=s2X(s)-sX(0)-x'(0)=s2X(s) ; x'(t)=sX(s)
=>s2X(s)+sX(s)+X(s)+(1/(s-1))X(s)=U(s)
=>X(s) [(s2+s+1)(s-1)+1]/(s-1) =U(s)
G(s)=X(s)/U(s) = (s-1)/(s2-s+1)
=>
,
,![]()
,D=0
5. Wyznacz rozwiązanie x(t) (prostego!) równania ![]()
, x(0).
Niech: 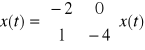
, 
⇒
⇒dziedzina s:
sx1(s) - x1(0+) = -2x1(s)
sx2(s) - x2(0+) = x2(s) - 4x2(s)
sx1(s) - 1 = -2x1(s)
sx2(s) - 1 = x2(s) - 4x2(s)
X1(s)(s+2) = 1 ⇒ ![]()
⇒ ![]()
⇒ X1(t)=e2t
X2(s)(s+4) = X1(s) + 1 = ![]()
X2(s)=![]()
sA + 4A + sB + 2B = s+3
s(A+B) + 4A + 2B = s+3
A+B = 1
4A+2B = 3 ⇒ A = -5/2, B=7/2
6. Podaj definicję oraz Kryterium dobrej określoności układu dynamicznego liniowego.
Układ jest dobrze określony jeśli dla każdej pary we-wy odpowiadająca tej parze transmitancja układu zamkniętego jest właściwa. ![]()
czyli degN(s) ≤ degD(s).
Kryterium dobrej określoności:
Układ zbudowany z 2 bloków o transmitancjach właściwych jest dobrze określony ⇔ Δ(∝)≠0, gdzie Δ-funkcja charakterystyczna schematu blokowego układu.
7. Sformułuj definicję stabilności BIBO, wewnętrznej oraz asymptotycznej układu liniowego. Podaj stosowne kryteria stwierdzania takiej stabilności.
Układ dynamiczny będziemy nazywać „stabilnym w sensie BIBO” jeśli każdy ograniczony sygnał wejściowy ||u(t)|| ≤ M1 < ∝ (0 ≤ t < ∝) wywołuje tylko ograniczony sygnał wyjściowy: ||y(t)|| ≤ M2 < ∝ (0 ≤ t < ∝)
Przy założeniu, że stan początkowy rozpatrywanego układu jest stanem określonym przez wektor zerowy. Układ jest stabilny w sensie BIBO ⇔ jeśli wszystkie bieguny jego transmitancji leżą w lewej półpłaszczyźnie zmiennych zespolonych.
Koncepcja stabilności BIBO nie jest szczególnie użyteczna bo układ o zadowalających własnościach reakcji we-wy może cierpieć na „wylewy wewnętrzne”, polega to na tym, że ||x(t)|| → ∝ .
STABILNOŚĆ ASYMPTOTYCZNA
Liniowy, stacjonarny układ nazywany będzie stabilnym asymptotycznie, jeśli punkt równowagi tego układu Xr=0 jest asymptotycznie stabilny. Xr=0 jest stabilny(w sensie Lapunova), jeśli dla każdej liczby dodatniej ε można dobrać taką liczbę η, że trajektoria układu rozpoczyna się wewnątrz koła o promieniu η.
Punkt Xr=0 będziemy nazywać stabilnym asymptotycznie, jeśli:
1°) punkt ten będzie stabilny w sensie Lapunova
2°) ![]()
STABILNOŚĆ LOKALNA
Mamy system nieautonomiczny ![]()
f(x) - różniczkowe
![]()
![]()
Jeżeli zlinearyzować w powyższy sposób system jest stabilny wówczas stan równowagi systemu oryginalnego (tzn. nieliniowego) jest asymptotycznie stabilny. Czyli stabilność systemu liniowego generuje lokalną stabilność asymptotyczna nieliniowego układu.
Stosowane kryteria: a) kryterium Routha
b) kryterium Hutwitza
8. Podaj oraz skomentuj def. sterowalności liniowego stacj. układu dynamicznego.
Para (A,B) opisująca nasz układ , A∈Rnxn, B∈Rnxp jest całkowicie sterowalna ![]()
x(0)![]()
0<tj<∞∃u:[0, tj] ->Rn X(tj)=0n
Kom: Widać, że dla układu, który jest całkowicie sterowalny dla dowolnego stanu pocz. x(t=0) zawsze istnieje jakieś sterowanie, które w skończonym czasie tj sprowadzi nam układ do stanu równowagi („orgin point”) -> inaczej: mamy system: x'(t)=Ax+Bu; x=nx1; y(t)=Cx+Du; u=rx1, y=px1; r wejść, p wyjść
Mówimy, że stan x(t) jest sterowalny w chwili t0, jeśli istnieje takie sterowanie u(t), które pozwala sprowadzić ten stan do dowolnego stanu końcowego x(tk). W czasie skończonym (tk-t0)≥0. Jeśli każdy stan jest sterowalny, to system jest sterowalny. Warunkiem koniecznym i dostatecznym jest aby macierz S∈Rnxn⋅λ miała rząd n.
![]()
rankS=n
9. Podaj oraz skomentuj definicję obserwowalności liniowego stacjonarnego układu dynamicznego.
Para (A,C) jest całkowicie obserwowalna, A∈Rnxn. C∈Rqxn ,q - ilość czujników znając wyjście y:[0,tj] -> Rq ![]()
tj>0 potrafimy wyznaczyć warunki początkowe x(0) gdzie x'(0) jest dowolne.
Kom: Układ „startując” z dowolnych nieznanych nam warunków początkowych, my natomiast budując tylko mierzymy na wyjściu układu przy znanych sygnałów pobudzających przez czas tj. jesteśmy w stanie wyznaczyć jego warunki początkowe.
Koncepcja obserwowalności pojawia się, kiedy trzeba uzyskiwać informacje o stanie (zm.x) na podstawie wyjścia i wejścia. Jeżeli co najmniej jedna ze zm. stanu nie może być odtworzona - powiadamy, że jest ona obserwowalna, a system nieobserwowalny.
-> inaczej: Jeśli mamy system: x'=Ax+Bu
y=Cx+Du
powiadamy, że stan x(t0).Jeżeli każdy stan jest obserwowalny o ile dla danego wejścia. u(t) istnieje taki skończony czas tk≤t0,że znajomość tego wejścia oraz wyjścia dla t0≤t≤tk jest wystarczająca dla określenia x(t0). Jeśli każdy stan jest obserwowalny w opisanym sensie powiadamy, że system jest całkowicie obserwowalny.
Warunkiem koniecznym i wystarczającym aby system był obserwowalny jest aby macierz V: 
miała rząd V=n (nxnp)
Mówiąc o obserwowalności można mówić o obserwowaniu pary AC. Jeśli nasz system ma tylko 1wejście (p=1) to wymiary macierzy V są nxn. Taka macierz ma rząd n jeśli jest nieosobliwa.
10. Omów przynajmniej dwa kryteria sterowalności liniowych obiektów dynamicznych.
1omac.ster. ![]()
∈Rnxnpma pełny rząd wierszowy. rank MC=n
2omac.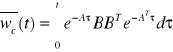
![]()
jest dodatnio określona![]()
3orank ~MC=n, gdzie ~![]()
∈Rmx(n-rB+1)p
rB=rankB
4o ![]()
gdzie:
![]()
∈Rmx(n-rB+1)p
m=degψA, ψA-wielomian minimalny.
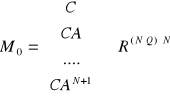
11. Omów przynajmniej 2 kryteria obserwowalności liniowych obiektów dynamicznych.
Para ![]()
1. rank ![]()
pełny rząd kolumnowy
2. rank ![]()
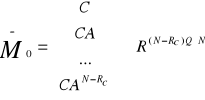
Rc rząd macierzy C, ta macierz ma mniej wierszy
3.
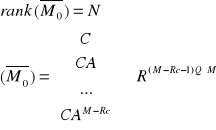
M=deg ![]()
czyli M-stopień wielomianu ![]()
wielomian minimalny macierzy A
![]()
![]()
+ Kartka Kowala
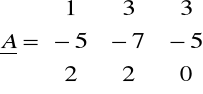
12. Sprawdź sterowalność zadanej (prostej) pary (A,b):

13. Sprawdż obserwowalność podanej prostej pary (A,C)

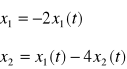
14. Sprawdź asymptotyczną stabilność systemu ![]()
o zadanej prostej macierzy A.
Wyznaczamy spect ![]()
. Wiadomo ze wartości własne macierzy ![]()
to rozwiązanie równania det![]()
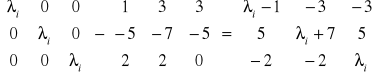
det![]()
Układ jest stabilny bo wszystkikie wartości własne macierzy A są „-„(mają „-„ części Re)
15. Dane są elementy pewnego systemu ![]()
. Wiadomo, że spectr A={λ,λ} (pods. wart. wł. λ należą do R)
a) rozważ problem obserwalności pary (A,C)
b)czy wzbogacając ten system o odpowiedni czujnik 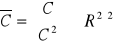
, można stosowaną parę (A, ![]()
) zawsze uczynić parą obserwowalną.

ilość wartości własnych 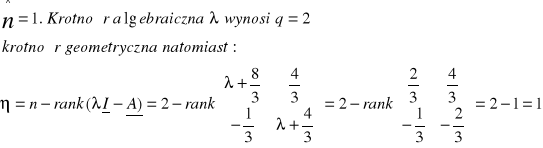
![]()
=1 mamy zatem tylko jedną lin. niezol kolumnę w macierzy.
Tą wart. wł. będzie zwrąz. Tylko jedna klatka Jordana o wymiarze 2x2
Szukamy więc postaci macierzy podobieństwa ![]()
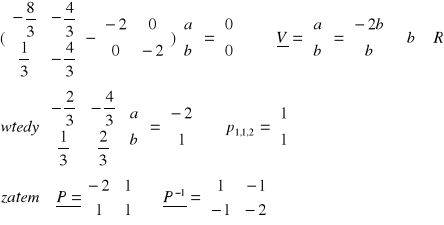
Musimy zatem znaleźć wektor własny dla wartości λ, a następnie uogól. wekt. wł.które stanowią macierz ![]()
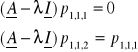
te dwa wektory stanowią macierz P=[p1,1,1 ,p1,1,2]
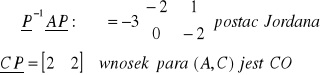
Pozostaje teraz obliczyć ![]()
.Jeżeli pierwsza kolumna macierzy CP będzie zerowała element zerowy to będzie to znaczyło iż para (A,C) nie jest CO.Nieobserwowalny będzie mod o numerze odpowiadający numerowi kolumny zew. Zerowy elem.
b)
Gdyby para (A,C) nie była CO to wtedy w wekt. CP part by się zerowy elem. Odpowiadający nie obserwowalnemu modowi: jeśli rozbudujemy C do postaci ![]()
to wtedy.
1. 
2.Natomiast dla C ![]()

TU MABYC 16-21
22. Omów kanoniczną dekompozycję przestrzeni stanu na część sterowalną oraz niesterowalną.
Niech ![]()
, ![]()
Jeżeli para (A,B) nie jest CS tzn. rank ![]()
to istnieje taka macierz ![]()
nieosobliwa, że:
gdzie: ![]()
jest CS.
Zatem 
, ![]()
Możemy zatem zapisać 
możemy dokonać dekompozycji przestrzeni ![]()
na dwie podprzestrzenie:
- podprzestrzeń ?? sterowalną
- podprzestrzeń ?? niesterowalną
![]()
podprz. niester.
? sterow.
Aby tego dokonać macierz ![]()
musi mieć odpowiednią postać. Postępujemy wg algorytmu:
wyznaczamy

i obliczamy rank
wybieramy

lin. niezal. Kolumn z
![]()
![]()
wybieramy

lin. niezal. kolumn z
![]()
![]()
23. Omów kanoniczną dekompozycję przestrzeni stanu na część obserwowalną oraz nieobserwowalną.
Dany jest model (A B C D) taki, że para (AC) nie jest CO ![]()
.
Istnieje taki model podobny ![]()
,że
, gdzie para ![]()
jest CO.
,![]()
![]()
->przestrzeń stanów nieobserwowalnych
![]()
->przestrzeń stanów obserwowalnych
24.Podaj definicję zera (niezmienniczego) obiektu dynamicznego opisanego modelem (A,B,C,D).
Rozpatrzmy model systemowy 
Macierz ta posiada ???? ![]()
:
![]()
postaci: 
Zero ????????? to taka liczba ![]()
, dla której ![]()
25) Omów syntezę obserwatora o minimalnym rzędzie
Aby mieć syntezę obserwatora to trzeba :
- równanie różniczkowe
- równanie opisujące pomiary czyi taki filtr tj. układ dynamiczny
Szukanie równania różniczkowego na dynamikę y
30) Zdefiniuj tak zwane f-cje wrażliwości danego zamkniętego układu regulacji (sterowania). Omów rolę takich f-cji w klasycznym i odpornym projektowaniu układów sterowania.
Za miarę wrażliwości jednowymiarowego układu liniowego o transmitancji operatorowej G(s) = G (s,x) przy zmianie parametru x, przyjmuje się wielkość zwaną współczynnikiem (lub f-cją) wrażliwości określoną:
W = W(s,x) = (dG(s,x) / dx ) * x / G(s,x)
Dla np. ujemnego sprzężenia zwrotnego (USzZ) G(s) = (k/s) / (1 + k/s) W = dG(s)/dk * k/G(s) = s/s+k
Wprowadzenie USzZ nie zawsze gwarantuje mniejszą wrażliwość układu na zmianę parametrów obiektu.
![]()
![]()
u(t)
y(t)
1
1
1
1
-1
2
2
x2
![]()
![]()
x1

Wyszukiwarka
Podobne podstrony:
teoria sterowania, Edukacja, studia, Semestr VI, Teoria Sterowania
TS - projekt, Edukacja, studia, Semestr VI, Teoria Sterowania, Projekt
zagadnienia teor urban2 2010 (1), Architektura i Urbanistyka, Studia, Semestr VI, Teoria urbanistyki
ROBOTY, Edukacja, studia, Semestr VI, Podstawy Robotyki
EWA5, Edukacja, studia, Semestr VI, Elementy Wykonawcze Automatyki
Laboratorium1, Edukacja, studia, Semestr VI, Elementy Wykonawcze Automatyki
Identyfikacja procesów, Edukacja, studia, Semestr VI, Identyfikacja procesów
roboty, Edukacja, studia, Semestr VI, Podstawy Robotyki, roboty
Teoria 2003, Edukacja, studia, Semestr IV, Architektura Systemów Komputerowych, Opracowania pytań
sterowanie - projekt 2 -2, Edukacja, studia, Semestr V, Sterowanie Analogowe, Laboratorium
ćwiczenie 6 - projekt, Edukacja, studia, Semestr V, Sterowanie Analogowe, Laboratorium
Wybierz, Edukacja, studia, Semestr VIII, Kultura Języka Polskiego, CD1 - 2006 KJP-1 INFORMATYKA, KJP
więcej podobnych podstron