AUTOMATYKA- KUROWSKA
AUTOMATYKA-jest zbiorem teorii matematycznych i techniką rozumowania dotyczącą podejmowania i wykonania decyzji. Technikę tę można dostosować do jakiegokolwiek zbioru powiązanych elementów (system).
MODEL MATEMATYCZNY SYSTEMU: zespół zależności matematycznych będących reprezentacją interesujących nas właściwości systemu i umożliwiających przewidywanie zachowania się systemu na drodze określonych rozwiązań.
ZADANIEM AUTOMATYKI: jest podjęcie decyzji na podstawie posiadanych o systemie informacji uwzględniając warunki zewnętrzne.
RYSUNEK UKŁAD OTWARTY (1)
RYSUNEK UKŁAD ZAMKNIĘTY (2)
Wytrącenie układu z równowagi to: --zmiana wartości zadanej „u”, --zakłócenia ↓↓↓ (w szczeg na obiekt).
sygnału y lub częsci do sygnału x nazywa się SPRZĘŻENIEM ZWROTNYM- połączenia wyjścia układu wejściem. Może to być sprzężenie dodatnie lub ujemne. W układzie regulacji musi to być sprzężenie ujemne.
WĘZEŁ ZACZEPOWY- do węzła dochodzi jeden sygnał a wychodzić może ich wiele i to są te same sygnały RYS (3)
WĘZEŁ SUMACYJNY: algebraicznie sygnały się sumują. RYS (4)
UKŁAD REGULACJI SPROW DO JEDNEGO BLOKU:
RYS (5)
Trzeba znać model matem obiektu, trzeba znaleźć rozwiązanie, zależność między sygnałem wyjściowym a wejściowym.
UKŁADY RZECZYWISTE: zakładamy, że układy te są stacjonarne bierzemy pod uwagę okres pracy jaki nas interesuje), przez cały czas działania zasada tego działania i samo działanie nie ulega zmianie.
MODELE MATEMATYCZNE OBIEKTÓW (opisy układów) są liniowe:
WE → → WY,
IDENTYFIKACJA OBIEKTU: to proces określania jego właściwości dynamicznych czyli proces znajdowania modelu matematycznego obiektu. Trzeba badać y w odpowiedzi na x. Metoda identyfikacyjna to podanie skoku jednostkowego.
TRANSMITACJA OPERATOROWA: równanie różniczkowe.
Przekształcenie La Place'a.
![]()
Całka musi być zależna tzn.
![]()
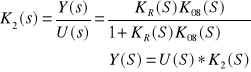
TRANSMITACJA OPERATOROWA UKŁADU: stosunek transformaty sygnału wyjściowego do transformaty sygnału wejściowego przy założeniu zerowych warunków początkowych.
T- jeden z modeli matematycznych opisujących dynamikę układu.
RYSUNEK (6)
![]()
![]()
RÓWNANIE CHARAKTERYSTYCZNE UKŁADU: to mianownika transmitacji zastępczej tego układu przyrównany do zera. Od tego równania zależy stabilność układu.
OPIS MATEMATYCZNY UKŁADU: po to odnajdujemy go, aby poznać jego dynamikę, aby móc dobierać taki regulator, który będzie działał w ten sposób aby kształtować sygnał wyjściowy tak jak chcemy. DYNAMIKA OBIEKTU: zespół danych do rozwiązania równania.
REGULATOR: komputer, który rozwiązuje równanie matematyczne.
Opis układu przy pomocy TRANSMITACJI WIDMOWEJ (częstotliwościowej) układ. Zastępujemy tu w transmitacji operatorowej s=jw.
j- jednostka urojona. G(jw.)=G(s), j2=-1, j=(-1)1/2 , w-pulsacja, w=2pif
TRANSMITACJA WIDMOWA: wykres w płaszczyźnie zespolonej nazywa się CHARAKTERYSTYKĄ AMPLITUDOWO-FAZOWĄ.
Na wejściu obiektu podaje się sygnał sinusoidalny. RYS (7)
RYS (8)
1) SYGNAŁ SKOKU JEDNOSTKOWEGO: rys (9)
h(t) --odpowiedź skokowa układu, --na jej podstawie wyciągamy wnioski o transmitacji układu. t- czas narastania pomijalnie mały do stałych czasowych obiektu- mamy tu sygnał skoku jednostkowego.
2) SYGNAŁ: IMPULS (funkcja) Dirac'a. , nie jesteśmy w stanie go wygenerować.
RYS (10)
Transmitacja układu to odpowiedź układu na impuls dirac'a, opis służy do wyznaczania sygnału wyjściowego.
PODSTAWOWE ELEMENTY AUTOMATYKI.
1) ELEMENT PROPORCJONALNY- równanie dynamiki ma postać y=k*x, k-wsp wzmocnienia, obiekt jest statyczny, nie ma pochodnych. CHARAKTERYSTYKA STATYCZNA y=k*x.
RYSUNEK (11).
CHARAKTERYSTYKA STATYCZNA: stosunek sygnału wyjściowego do sygnału wejściowego w stanie ustalonym.
CHARAKTERYSTYKA SKOKOWA: x(t)=1(t), y(t)=4*1(t),
Dostajemy wartość skoku jednostkowego. RYS (12)
CHARAKTERYSTYKA AMPLITUDOWO-FAZOWA: RYS (13)
Wyznaczyć równanie ruchu i transmitacjię operatywną dźwigni dwuramienną jeżeli wielkością wejściową jest przesunięcie x a wielkością wyjściową przesunięcie y. Dźwignia jest elementem proporcjonalnym RYS (14)
2) ELEMENT INERCYJNY PIERWSZEGO RZĘDU (STOPNIA): jeżeli układ b można opisać równaniem T dy(t)/dt + y(t)=kx(t)
TRANSMITACJA: TY(s)*s+ Y(s) =kx(s), G(s)= Y(s)/ X(s)= k/TS+1
CHARAKTERYSTYKA STATYCZNA: y=kx, y(t)=k(1-e-t/T), kształt transmitacji: G(s)= k/1=sT. RYS (15)
CHARAKTERYSTYKA AMPLITUDOWO-FAZOWA (transmitacja widmowa). RYS (16)
3ELEMENT INERCYJNY WYŻSZEGO RZEDU (przykład elementu statycznego). G(s)= (k/1+St) *e-ST RYS (17)
STABILNOŚĆ UKŁADU:
RYS (18)
UKŁAD JEST STABILNY: Układ jest stabilny gdy powraca do stanu równowagi po ustaniu działania czynnika wytrącającego go z tego stanu równowagi. Zamknięty układ liniowy uważać będziemy za stabilny jeżeli po wytrąceniu z równowagi powraca on do stanu równowagi poprzedniej po ustaniu działania sygnału który go z tej równowagi wytrącił. Granicą stabilności są oscylacje stałe- nie rosnące.
Warunek stabilności- części rzeczywiste pierwiastków równania charakterystycznego są ujemne: ReSk< 0. jeśli tak nie jest to stosujemy korektor. M(s)=anSn + an-1 Sn-1+…+a0=0.
Mianownika transmitacji zastępczej układ- czyli wielomian charakterystyczny układu.
WARUNEK STABILNOŚCI; części rzeczywiste pierwiastków równania charakterystycznego są ujemne: ReSk <0, jeśli tak nie jest to stosujemy korektor . RYS (19)
KRYTERIA STABILNOŚCI:
1) KRYTERIUM HURWITZA: M(S)=anSn + an-1 Sn-1+…+a1S+a0=0.
a) an>0, an-1>0, … a0>0. wszystkie współczynniki równania charakterystycznego dodatnie (tego samego znaku).
ELEMENTY SKŁADAJĄCE SIĘ NA DOBÓR REGULATORA:
Wzmocnienie „K”,
element całkujący,
element różniczkujący.
2) KRYTERIUM NYQUISTA: sprawdzanie stabilności układu zamkniętego poprzez sprawdzenie charakterystyki amplitudowo- falowej: A) Badamy charakterystykę częstotliwościową układu otwartego.
RYS (20)
Układ zamknięty jest stabilny jeżeli charakterystyka amplitudowo fazowa układu otwartego przy poruszaniu się w kierunku rosnących częstotliwości zostawia punkt (-1, j0) po swojej lewej stronie (na zewnątrz).
RYS (21)
ΔM- zapas stabilności modułu- odległość punktu przecięcia się charakterystyki układu otwartego z osią rzeczywistą do pkt -1
Δϕ- zapas stabilności fazy- kąt pomiędzy ujemną osią Re a promieniem łączącym pkt przecięcia się charakterystyki z okręgiem ze środka układu. Zalecane: ΔM=>0.5, Δϕ: 30-450
Kiedy układ zamknięty jest niestabilny to zmieniamy nastawy regulatora lub dodajemy sprężenie zerujące do obiektu.
KRYTERIA JAKOŚCI REGULACJI:
STANDARDOWE SYGNAŁY ODNIESIENIA: RYS (22)
CZAS REGULACJI: czas po jakim wartość regulowana osiąga wartość zadaną z założoną dokładnością.
Jedno z kryteriów to min. czasu regulacji. Jeśli minimaliz. ten czas to nastawiamy takie nastawy regulatora aby ten czas był minmalny.
Inne kryterium to kryterium określonego lub minim przeregulowania.
PRZEREGULOWANIE; chodzi by ograniczyć amplitudę pierwszego zamknięcia. RYS (23)
Trzecie kryterium z grupy kryteriów odcinkowych to ΔM i Δϕ
CZAS REGULACJI- RYS (24)
W stanie ustalonym jest błąd statyczny (ustalony). RYS (25)
KRYTERIA CAŁKOWE:
RYS (26)
KRYTERIUM całki z kwadratu błędu: tak dobier nastawy regulatora aby całka była minmalna.
UKŁADY LOGICZNE:
HYBRYDA: połączenie dwu lub więcej elementów zupełnie ze sobą nie związanych. UKŁAD HYBRYDOWY: połączenie układu cyfrowego z układem analogowym. SYGNAŁ ANALOGOWY: sygnał ciągły. SYGNAŁ LOGICZNY: zero-jedynkowy (binarny). UKŁAD LOGICZNY: działający w oparciu o sygnały logiczne czyli zero-jedynkowe. UKŁADY ANALOGOWY: działa w oparciu o sygnały ciągłe. SYGNAŁ CYFROWY: mają skończoną liczbę wartości np. logiczny (o/1- binarny).
ALGEBRA BOOL'A (ALGEBRA LOGIKI):-- dziedzina matematyki, w której określony został zbiór dwuelementowy B={0,1} oraz określone (zdefiniowane) zostały trzy operacje. A) NEGACJE: jednoargumentowa, B) SUMA LOGICZNA: zwana alternatywą, wieloargumentowa (2 lub więcej). C) ILOCZYN LOGICZNY: koniunkcja, wieloelementowa operacja, której wynikiem jest 1 gdy wszystkie elementy są jedynkami lub żaden element nie jest zerem. a+1=1, a+0=0 lub 1=a, a*0=0, a*1=1lub 0 =a, a*a =0, a*a*a...=0lub 1=a,
PRAWA: przemienność, łączność
PRAWA de MORGANA:
![]()
![]()
AUTOMATYKA- KUROWSKA
AUTOMATYKA-jest zbiorem teorii matematycznych i techniką rozumowania dotyczącą podejmowania i wykonania decyzji. Technikę tę można dostosować do jakiegokolwiek zbioru powiązanych elementów (system).
MODEL MATEMATYCZNY SYSTEMU: zespół zależności matematycznych będących reprezentacją interesujących nas właściwości systemu i umożliwiających przewidywanie zachowania się systemu na drodze określonych rozwiązań.
ZADANIEM AUTOMATYKI: jest podjęcie decyzji na podstawie posiadanych o systemie informacji uwzględniając warunki zewnętrzne.
RYSUNEK UKŁAD OTWARTY (1)
RYSUNEK UKŁAD ZAMKNIĘTY (2)
Wytrącenie układu z równowagi to: --zmiana wartości zadanej „u”, --zakłócenia ↓↓↓ (w szczeg na obiekt).
sygnału y lub częsci do sygnału x nazywa się SPRZĘŻENIEM ZWROTNYM- połączenia wyjścia układu wejściem. Może to być sprzężenie dodatnie lub ujemne. W układzie regulacji musi to być sprzężenie ujemne.
WĘZEŁ ZACZEPOWY- do węzła dochodzi jeden sygnał a wychodzić może ich wiele i to są te same sygnały RYS (3)
WĘZEŁ SUMACYJNY: algebraicznie sygnały się sumują. RYS (4)
UKŁAD REGULACJI SPROW DO JEDNEGO BLOKU:
RYS (5)
Trzeba znać model matem obiektu, trzeba znaleźć rozwiązanie, zależność między sygnałem wyjściowym a wejściowym.
UKŁADY RZECZYWISTE: zakładamy, że układy te są stacjonarne bierzemy pod uwagę okres pracy jaki nas interesuje), przez cały czas działania zasada tego działania i samo działanie nie ulega zmianie.
MODELE MATEMATYCZNE OBIEKTÓW (opisy układów) są liniowe:
WE → → WY,
IDENTYFIKACJA OBIEKTU: to proces określania jego właściwości dynamicznych czyli proces znajdowania modelu matematycznego obiektu. Trzeba badać y w odpowiedzi na x. Metoda identyfikacyjna to podanie skoku jednostkowego.
TRANSMITACJA OPERATOROWA: równanie różniczkowe.
Przekształcenie La Place'a.
![]()
Całka musi być zależna tzn.
![]()
TRANSMITACJA OPERATOROWA UKŁADU: stosunek transformaty sygnału wyjściowego do transformaty sygnału wejściowego przy założeniu zerowych warunków początkowych.
T- jeden z modeli matematycznych opisujących dynamikę układu.
RYSUNEK (6)
![]()
![]()
RÓWNANIE CHARAKTERYSTYCZNE UKŁADU: to mianownika transmitacji zastępczej tego układu przyrównany do zera. Od tego równania zależy stabilność układu.
OPIS MATEMATYCZNY UKŁADU: po to odnajdujemy go, aby poznać jego dynamikę, aby móc dobierać taki regulator, który będzie działał w ten sposób aby kształtować sygnał wyjściowy tak jak chcemy. DYNAMIKA OBIEKTU: zespół danych do rozwiązania równania.
REGULATOR: komputer, który rozwiązuje równanie matematyczne.
Opis układu przy pomocy TRANSMITACJI WIDMOWEJ (częstotliwościowej) układ. Zastępujemy tu w transmitacji operatorowej s=jw.
j- jednostka urojona. G(jw.)=G(s), j2=-1, j=(-1)1/2 , w-pulsacja, w=2pif
TRANSMITACJA WIDMOWA: wykres w płaszczyźnie zespolonej nazywa się CHARAKTERYSTYKĄ AMPLITUDOWO-FAZOWĄ.
Na wejściu obiektu podaje się sygnał sinusoidalny. RYS (7)
RYS (8)
1) SYGNAŁ SKOKU JEDNOSTKOWEGO: rys (9)
h(t) --odpowiedź skokowa układu, --na jej podstawie wyciągamy wnioski o transmitacji układu. t- czas narastania pomijalnie mały do stałych czasowych obiektu- mamy tu sygnał skoku jednostkowego.
2) SYGNAŁ: IMPULS (funkcja) Dirac'a. , nie jesteśmy w stanie go wygenerować.
RYS (10)
Transmitacja układu to odpowiedź układu na impuls dirac'a, opis służy do wyznaczania sygnału wyjściowego.
PODSTAWOWE ELEMENTY AUTOMATYKI.
1) ELEMENT PROPORCJONALNY- równanie dynamiki ma postać y=k*x, k-wsp wzmocnienia, obiekt jest statyczny, nie ma pochodnych. CHARAKTERYSTYKA STATYCZNA y=k*x.
RYSUNEK (11).
CHARAKTERYSTYKA STATYCZNA: stosunek sygnału wyjściowego do sygnału wejściowego w stanie ustalonym.
CHARAKTERYSTYKA SKOKOWA: x(t)=1(t), y(t)=4*1(t),
Dostajemy wartość skoku jednostkowego. RYS (12)
CHARAKTERYSTYKA AMPLITUDOWO-FAZOWA: RYS (13)
Wyznaczyć równanie ruchu i transmitacjię operatywną dźwigni dwuramienną jeżeli wielkością wejściową jest przesunięcie x a wielkością wyjściową przesunięcie y. Dźwignia jest elementem proporcjonalnym RYS (14)
2) ELEMENT INERCYJNY PIERWSZEGO RZĘDU (STOPNIA): jeżeli układ b można opisać równaniem T dy(t)/dt + y(t)=kx(t)
TRANSMITACJA: TY(s)*s+ Y(s) =kx(s), G(s)= Y(s)/ X(s)= k/TS+1
CHARAKTERYSTYKA STATYCZNA: y=kx, y(t)=k(1-e-t/T), kształt transmitacji: G(s)= k/1=sT. RYS (15)
CHARAKTERYSTYKA AMPLITUDOWO-FAZOWA (transmitacja widmowa). RYS (16)
3ELEMENT INERCYJNY WYŻSZEGO RZEDU (przykład elementu statycznego). G(s)= (k/1+St) *e-ST RYS (17)
STABILNOŚĆ UKŁADU:
RYS (18)
UKŁAD JEST STABILNY: Układ jest stabilny gdy powraca do stanu równowagi po ustaniu działania czynnika wytrącającego go z tego stanu równowagi. Zamknięty układ liniowy uważać będziemy za stabilny jeżeli po wytrąceniu z równowagi powraca on do stanu równowagi poprzedniej po ustaniu działania sygnału który go z tej równowagi wytrącił. Granicą stabilności są oscylacje stałe- nie rosnące.
Warunek stabilności- części rzeczywiste pierwiastków równania charakterystycznego są ujemne: ReSk< 0. jeśli tak nie jest to stosujemy korektor. M(s)=anSn + an-1 Sn-1+…+a0=0.
Mianownika transmitacji zastępczej układ- czyli wielomian charakterystyczny układu.
WARUNEK STABILNOŚCI; części rzeczywiste pierwiastków równania charakterystycznego są ujemne: ReSk <0, jeśli tak nie jest to stosujemy korektor . RYS (19)
KRYTERIA STABILNOŚCI:
1) KRYTERIUM HURWITZA: M(S)=anSn + an-1 Sn-1+…+a1S+a0=0.
a) an>0, an-1>0, … a0>0. wszystkie współczynniki równania charakterystycznego dodatnie (tego samego znaku).
ELEMENTY SKŁADAJĄCE SIĘ NA DOBÓR REGULATORA:
Wzmocnienie „K”,
element całkujący,
element różniczkujący.
2) KRYTERIUM NYQUISTA: sprawdzanie stabilności układu zamkniętego poprzez sprawdzenie charakterystyki amplitudowo- falowej: A) Badamy charakterystykę częstotliwościową układu otwartego.
RYS (20)
Układ zamknięty jest stabilny jeżeli charakterystyka amplitudowo fazowa układu otwartego przy poruszaniu się w kierunku rosnących częstotliwości zostawia punkt (-1, j0) po swojej lewej stronie (na zewnątrz).
RYS (21)
ΔM- zapas stabilności modułu- odległość punktu przecięcia się charakterystyki układu otwartego z osią rzeczywistą do pkt -1
Δϕ- zapas stabilności fazy- kąt pomiędzy ujemną osią Re a promieniem łączącym pkt przecięcia się charakterystyki z okręgiem ze środka układu. Zalecane: ΔM=>0.5, Δϕ: 30-450
Kiedy układ zamknięty jest niestabilny to zmieniamy nastawy regulatora lub dodajemy sprężenie zerujące do obiektu.
KRYTERIA JAKOŚCI REGULACJI:
STANDARDOWE SYGNAŁY ODNIESIENIA: RYS (22)
CZAS REGULACJI: czas po jakim wartość regulowana osiąga wartość zadaną z założoną dokładnością.
Jedno z kryteriów to min. czasu regulacji. Jeśli minimaliz. ten czas to nastawiamy takie nastawy regulatora aby ten czas był minmalny.
Inne kryterium to kryterium określonego lub minim przeregulowania.
PRZEREGULOWANIE; chodzi by ograniczyć amplitudę pierwszego zamknięcia. RYS (23)
Trzecie kryterium z grupy kryteriów odcinkowych to ΔM i Δϕ
CZAS REGULACJI- RYS (24)
W stanie ustalonym jest błąd statyczny (ustalony). RYS (25)
KRYTERIA CAŁKOWE:
RYS (26)
KRYTERIUM całki z kwadratu błędu: tak dobier nastawy regulatora aby całka była minmalna.
UKŁADY LOGICZNE:
HYBRYDA: połączenie dwu lub więcej elementów zupełnie ze sobą nie związanych. UKŁAD HYBRYDOWY: połączenie układu cyfrowego z układem analogowym. SYGNAŁ ANALOGOWY: sygnał ciągły. SYGNAŁ LOGICZNY: zero-jedynkowy (binarny). UKŁAD LOGICZNY: działający w oparciu o sygnały logiczne czyli zero-jedynkowe. UKŁADY ANALOGOWY: działa w oparciu o sygnały ciągłe. SYGNAŁ CYFROWY: mają skończoną liczbę wartości np. logiczny (o/1- binarny).
ALGEBRA BOOL'A (ALGEBRA LOGIKI):-- dziedzina matematyki, w której określony został zbiór dwuelementowy B={0,1} oraz określone (zdefiniowane) zostały trzy operacje. A) NEGACJE: jednoargumentowa, B) SUMA LOGICZNA: zwana alternatywą, wieloargumentowa (2 lub więcej). C) ILOCZYN LOGICZNY: koniunkcja, wieloelementowa operacja, której wynikiem jest 1 gdy wszystkie elementy są jedynkami lub żaden element nie jest zerem. a+1=1, a+0=0 lub 1=a, a*0=0, a*1=1lub 0 =a, a*a =0, a*a*a...=0lub 1=a,
PRAWA: przemienność, łączność
PRAWA de MORGANA:
![]()
![]()
![]()
![]()
![]()
![]()




Wyszukiwarka
Podobne podstrony:
Do nazw pięter lasu dopasuj właściwe składniki i miejsce na rysunku
Aby przejść do opisu poszczególnych grup szkieletu kliknj odpowiednie miejsce na rysunku doc
Material 1 na koło, AM SZCZECIN, EKONOMIA
STATEK NA MIELIŹNIE, AM SZCZECIN, ratownictwo morskie
AKTY PRZEMOCY NA STATKACH, AM SZCZECIN, BEZPIECZEŃSTWO STATKU
AUTOMATYKA-WYKŁADY-KUROWSKA, AM SZCZECIN, AUTOMATYKA, Automatyka - wykłady
Automatyka - 5-3 - Elementy inercyjne, AM SZCZECIN, AUTOMATYKA, Automatyka - wykłady
Pan Ziemniak, AM SZCZECIN, AUTOMATYKA, Automatyka - wykłady, Automatyka Okrętowa Kaszycki
Ekonomia - Prawie wszystko co bylo na wykladach i po za nimi, AM SZCZECIN, EKONOMIA
Automatyka - 5-2 - Sygnały deterministyczne, AM SZCZECIN, AUTOMATYKA, Automatyka - wykłady
Automatyka - 5-3 - Elementy inercyjne, AM SZCZECIN, AUTOMATYKA, Automatyka - wykłady
PN B 01029 Zasady wymiarowania na rysunkach architektoniczno budowlanych
PN 70 B 01025 Oznaczenia graficzne na rysunkach architektoni
Oznaczenia na rysunkach wg PN EN 12792 rozprowadzenie powietrza
Technologie informacyjne - wykład 2-4, AM SZCZECIN, Informatyka - Wykłady
Bezpieczeństwo nawigacji - Wykład 1, AM SZCZECIN, Bezpieczeństwo nawigacji
Bezpieczeństwo nawigacji - Wykład 9, AM SZCZECIN, Bezpieczeństwo nawigacji
Obudowa akwarium wraz z miejscem na świetlówki, AKWARYSTYKA
najpiekniejsze miejsce na swiecie edukacja globalna 148 6810
więcej podobnych podstron