Politechnika Warszawska
Instytut Automatyki i Robotyki
Prof. dr hab. inż. Jan Maciej Kościelny
PODSTAWY AUTOMATYKI
część 2
Opis matematyczny układów liniowych
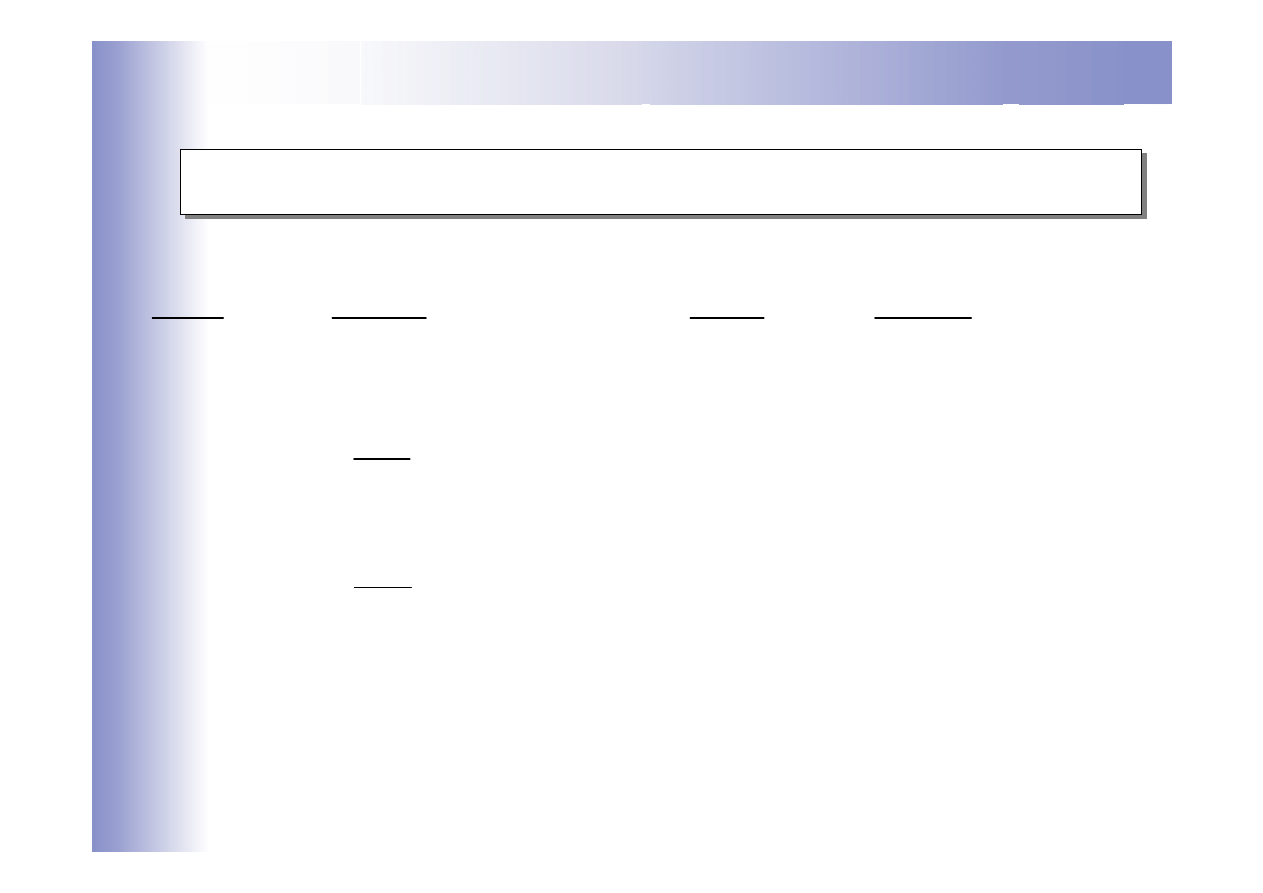
Linearyzacja układów nieliniowych
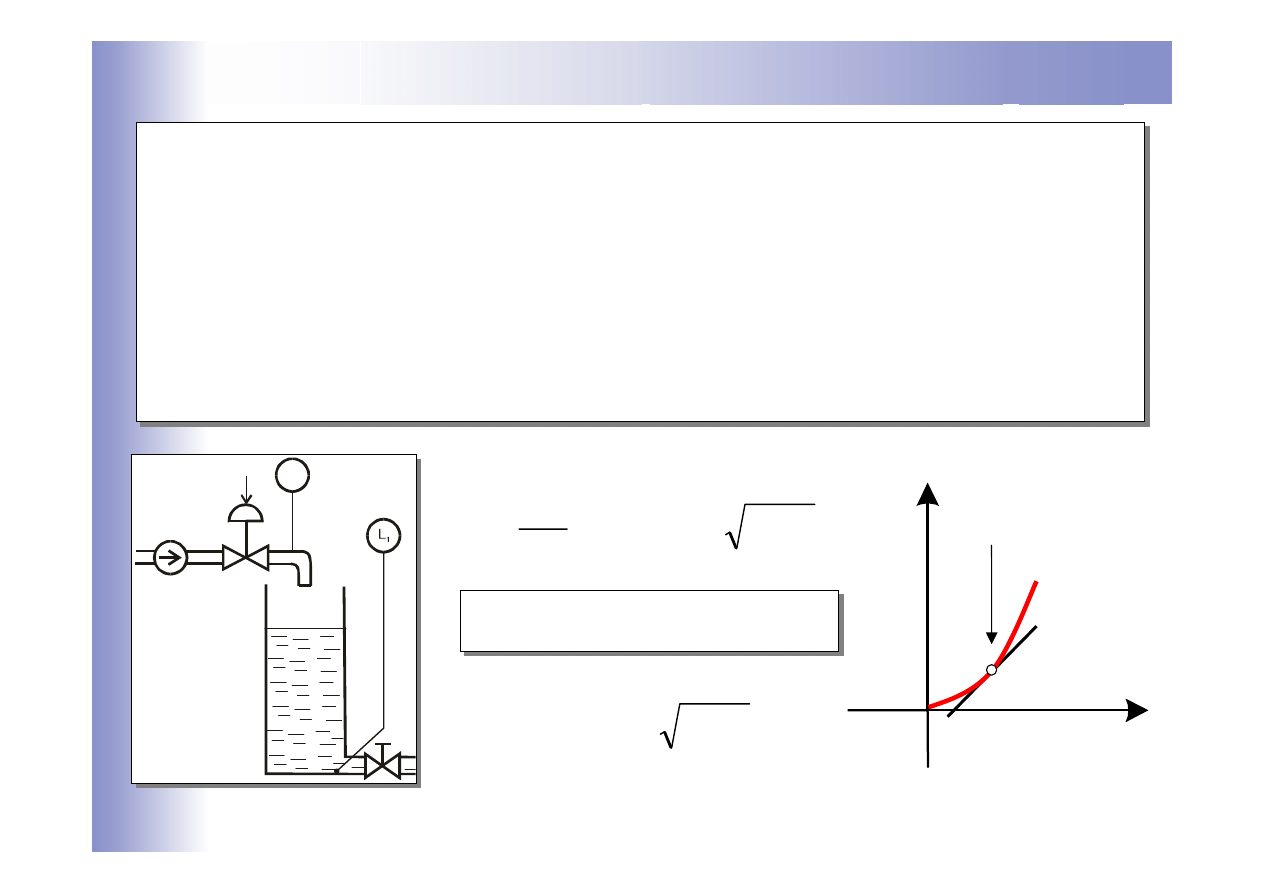
Rzeczywiste układy regulacji zazwyczaj są układami nieliniowymi, dla
uproszczenia opisu matematycznego przeprowadza się ich
linearyzację, co pozwala na sformułowanie przybliżonego opisu
liniowego, ważnego w otoczeniu wybranego punktu pracy na
charakterystyce statycznej (punkt ten odpowiada najczęściej
nominalnym lub uśrednionym warunkom pracy układu).
Rzeczywiste układy regulacji zazwyczaj są układami nieliniowymi, dla
uproszczenia opisu matematycznego przeprowadza się ich
linearyzację, co pozwala na sformułowanie przybliżonego opisu
liniowego, ważnego w otoczeniu wybranego punktu pracy na
charakterystyce statycznej (punkt ten odpowiada najczęściej
nominalnym lub uśrednionym warunkom pracy układu).
1
12
12
1
1
2gL
S
F
dt
dL
A
α
−
=
U
F
Charakterystyka statyczna
Charakterystyka statyczna
1
12
12
2gL
S
F
α
=
L
1
punkt pracy
F
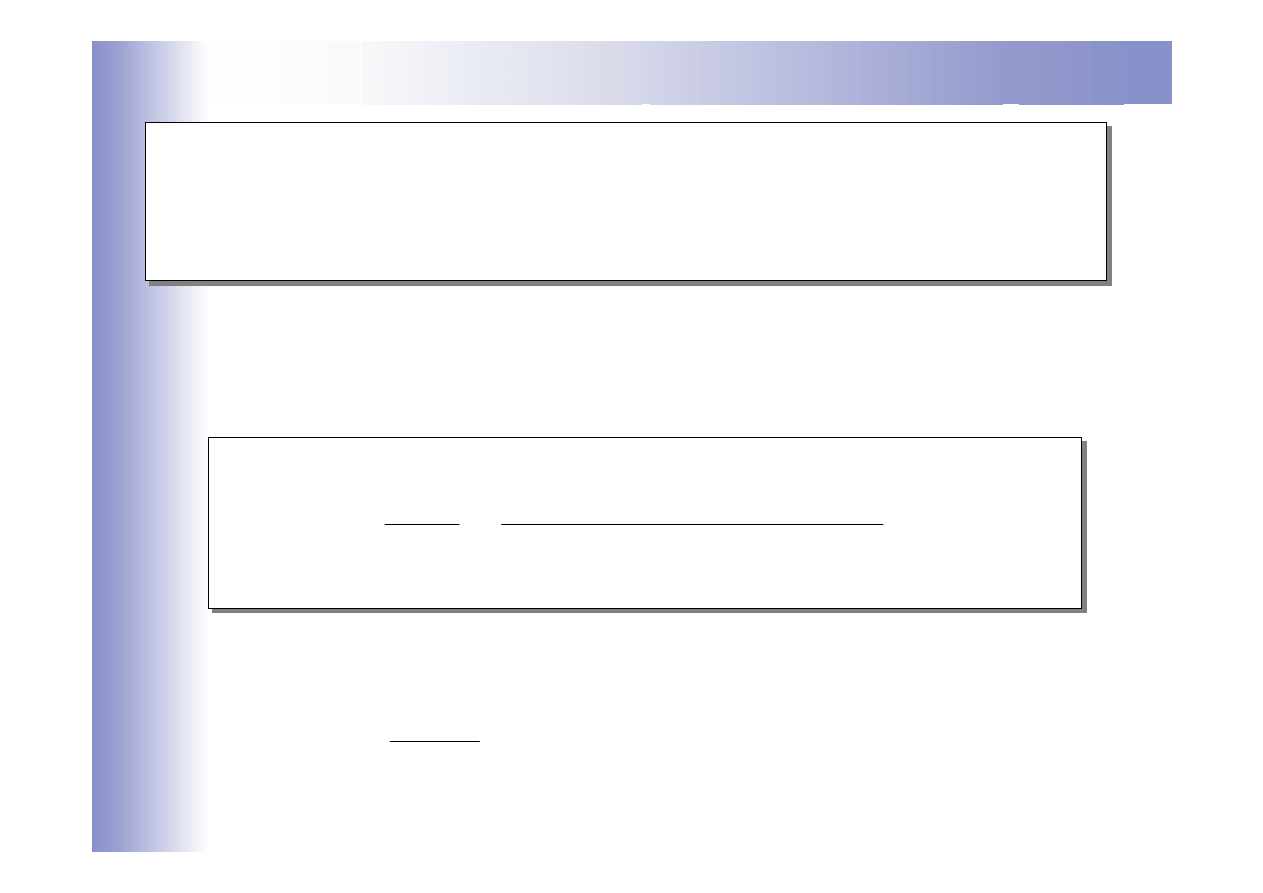
Opis matematyczny układów liniowych
Ogólna postać równania różniczkowego układu liniowego:
Ogólna postać równania różniczkowego układu liniowego:
gdzie: y- sygnał wyjściowy, x-sygnał wejściowy, a
i
, b
i
- współczynniki stałe
y, u – są odchyłkami od punktu pracy
u
b
dt
u
d
b
dt
u
d
b
y
a
dt
y
d
a
dt
y
d
a
m
m
m
m
m
m
n
n
n
n
n
n
0
1
1
1
0
1
1
1
+
+
+
=
+
+
+
−
−
−
−
−
−
K
K
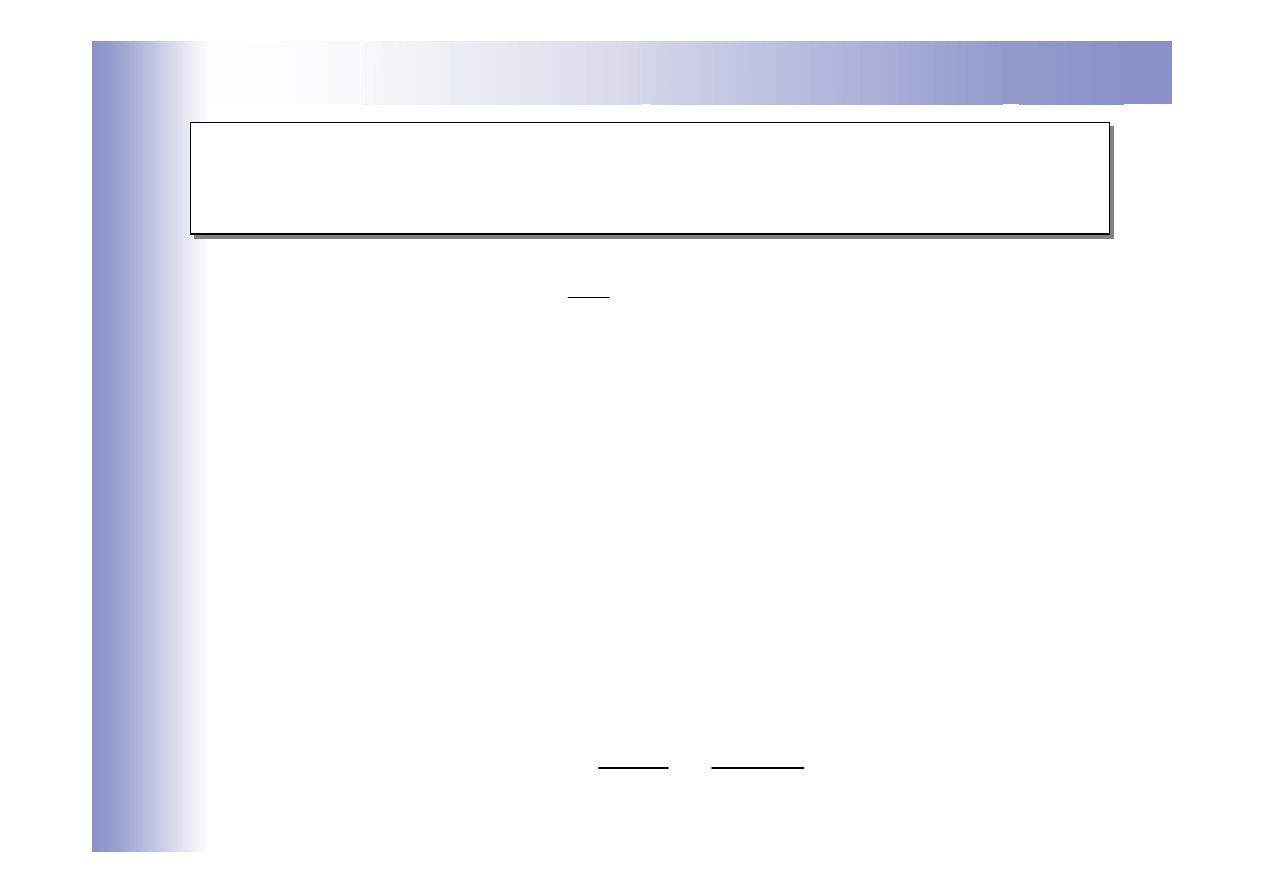
ZASADA SUPERPOZYCJI
ZASADA SUPERPOZYCJI
y(u
1
+u
2
)=y(u
1
)+y(u
2
)
gdzie: y(u
i
) oznacza odpowiedź układu y na wymuszenie u
i
;
oraz y(0)=0
Charakterystyka statyczna
Charakterystyka statyczna układu – przedstawia zależność sygnału
wyjściowego układu od sygnału wejściowego w stanie ustalonym
Charakterystyka statyczna układu – przedstawia zależność sygnału
wyjściowego układu od sygnału wejściowego w stanie ustalonym
Stan ustalony układu – wszystkie pochodne sygnału wejściowego
i sygnału wyjściowego są równe zero
Stan ustalony układu – wszystkie pochodne sygnału wejściowego
i sygnału wyjściowego są równe zero
u
y
Postać charakterystyki statycznej układów liniowych i zlinearyzowanych:
Postać charakterystyki statycznej układów liniowych i zlinearyzowanych:
gdzie: u,y – wejście, wyjście z układu
u
a
b
y
0
0
=
Przekształcenie Laplace’a
Zastąpienie równania różniczkowego transmitancją operatorową,
przejście z dziedziny czasu rzeczywistego na zmienną zespoloną
Zastąpienie równania różniczkowego transmitancją operatorową,
przejście z dziedziny czasu rzeczywistego na zmienną zespoloną
)
(
)
(
s
f
t
f
⇔
ω
j
c
s
+
=
∫
∞
−
=
0
)
(
)
(
dt
e
t
f
s
f
st
)]
(
[
)
(
t
f
L
s
f
=
)]
(
[
)
(
1
s
f
L
t
f
−
=
∫
⋅
+
⋅
−
⋅
⋅
⋅
⋅
⋅
=
ω
j
c
ω
j
c
t
s
def
ds
e
F(s)
j
π
2
1
)
(t
f
przekształcenie
Laplace’a
odwrotne
przekształcenie
Laplace’a
Opis matematyczny układów liniowych
Zastąpienie równania różniczkowego transmitancją operatorową:
Zastąpienie równania różniczkowego transmitancją operatorową:
)
(
)
(
)
(
)
(
0
1
1
0
1
1
b
s
b
s
b
s
u
a
s
a
s
a
s
y
m
m
m
m
n
n
n
n
+
+
+
⋅
=
+
+
+
⋅
−
−
−
−
K
K
u
b
dt
u
d
b
dt
u
d
b
y
a
dt
y
d
a
dt
y
d
a
m
m
m
m
m
m
n
n
n
n
n
n
0
1
1
1
0
1
1
1
+
+
+
=
+
+
+
−
−
−
−
−
−
K
K
)
(0
y
)
y(0
s
y(s)
s
dt
y
d
L
1
n
1
n
n
n
n
+
−
+
−
−
−
⋅
−
⋅
=
K
y(s)
s
dt
y
d
L
n
n
n
⋅
=
przy zerowych warunkach
początkowych
Transmitancja operatorowa
m
n
a
s
a
s
a
b
s
b
s
b
s
u
s
y
s
G
n
n
n
n
m
m
m
m
≥
+
+
+
+
+
+
=
=
−
−
−
−
,
)
(
)
(
)
(
0
1
1
0
1
1
K
K
Transmitancja operatorowa: stosunek transformaty sygnału
wyjściowego do transformaty sygnału wejściowego przy
zerowych warunkach początkowych
Transmitancja operatorowa: stosunek transformaty sygnału
wyjściowego do transformaty sygnału wejściowego przy
zerowych warunkach początkowych
)
(
)
(
)
(
)
(
0
1
1
0
1
1
b
s
b
s
b
s
u
a
s
a
s
a
s
y
m
m
m
m
n
n
n
n
+
+
+
⋅
=
+
+
+
⋅
−
−
−
−
K
K
)
(
)
(
)
(
s
N
s
M
s
G
=
0
1
1
0
1
1
)
(
)
(
a
s
a
s
a
s
N
b
s
b
s
b
s
M
n
n
n
n
m
m
m
m
+
+
+
=
+
+
+
=
−
−
−
−
K
K
Wyznaczanie transmitancji operatorowej
Przykład 1: Wyznaczyć transmitancję operatorową układu
opisanego równaniem różniczkowym:
Przykład 1: Wyznaczyć transmitancję operatorową układu
opisanego równaniem różniczkowym:
Wykorzystując operator różniczkowania s można
powyższe równanie zapisać w postaci
3u
y
dt
dy
2
=
+
⋅
1
2s
3
u(s)
y(s)
G(s)
3u(s)
y(s)
1)
(2s
3u(s)
y(s)
y(s)
2s
+
=
=
=
⋅
+
=
+
⋅
c
c
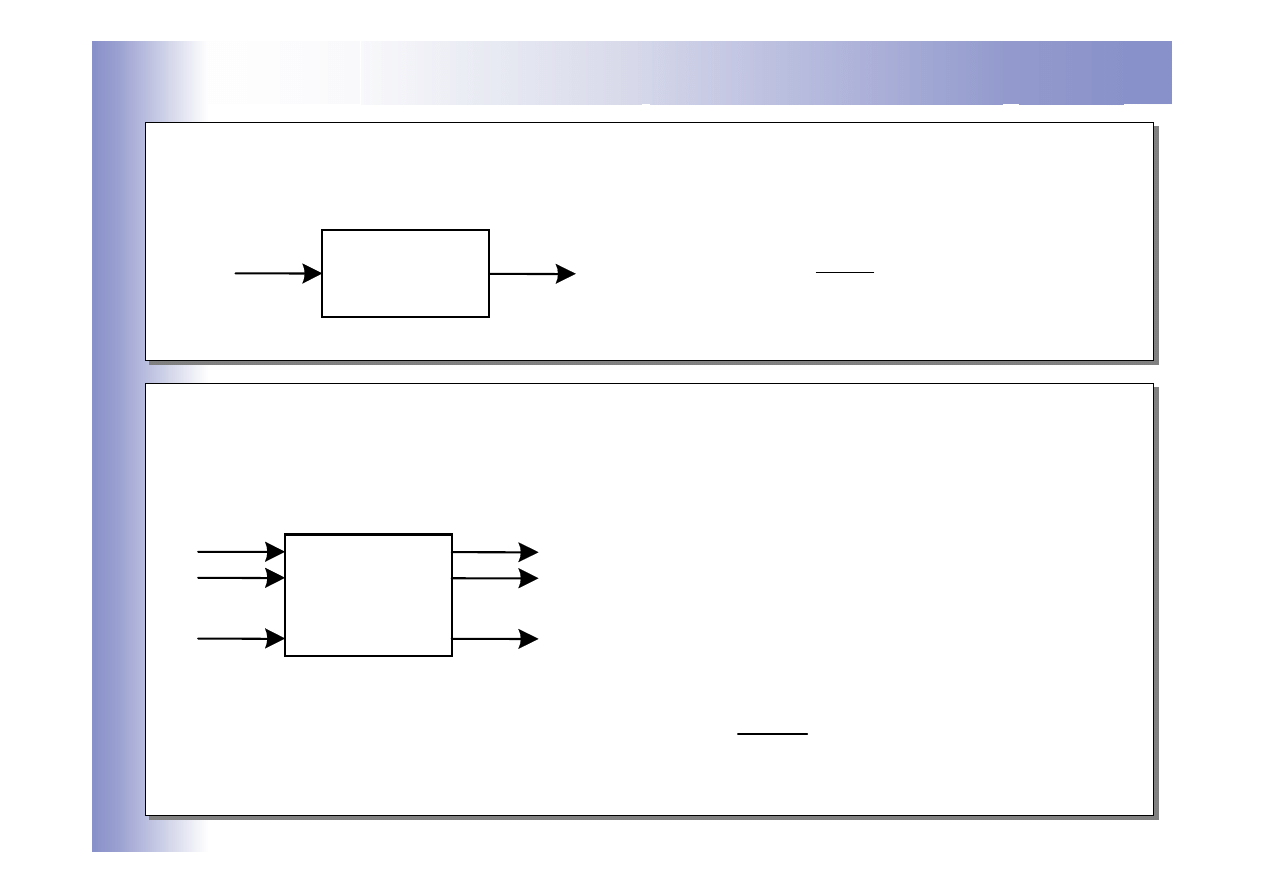
Opis elementów na schematach blokowych
Obiekty o jednym wejściu i jednym wyjściu:
Obiekty o jednym wejściu i jednym wyjściu:
u
y
G(s)
...
...
u
1
u
2
u
m
y
1
y
2
y
m
MG(s)
=
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
2
1
2
22
21
1
12
11
s
G
s
G
s
G
s
G
s
G
s
G
s
G
s
G
s
G
s
MG
nm
n
n
m
m
K
M
M
M
M
K
K
m
k
n
i
s
u
s
y
s
G
k
i
ik
K
K
1
,
1
,
)
(
)
(
)
(
=
=
=
)
(
)
(
)
(
s
u
s
y
s
G
=
Obiekty wielowymiarowe:
Wyznaczenie charakterystyki statycznej
z transmitancji operatorowej
)
(
)
(
lim
)
(
lim
)
(
lim
0
0
0
s
u
s
G
s
s
y
s
t
y
y
s
s
t
⋅
=
⋅
=
=
→
→
∞
→
)
(
lim
0
0
0
s
G
u
y
s
→
=
)
(
lim
0
0
0
s
G
u
y
s
→
=
Końcowe równanie charakterystyki statycznej:
0
0
0
0
u
a
b
y
=
),
(
lim
),
(
lim
0
0
t
y
y
t
u
u
t
t
∞
→
∞
→
=
=
Na podstawie twierdzenia o wartości końcowej:
0
0
1
)
(
u
s
s
u
const
u
=
⇒
=
0
1
1
0
1
1
)
(
a
s
a
s
a
b
s
b
s
b
s
G
n
n
n
n
m
m
m
m
+
+
+
+
+
+
=
−
−
−
−
K
K
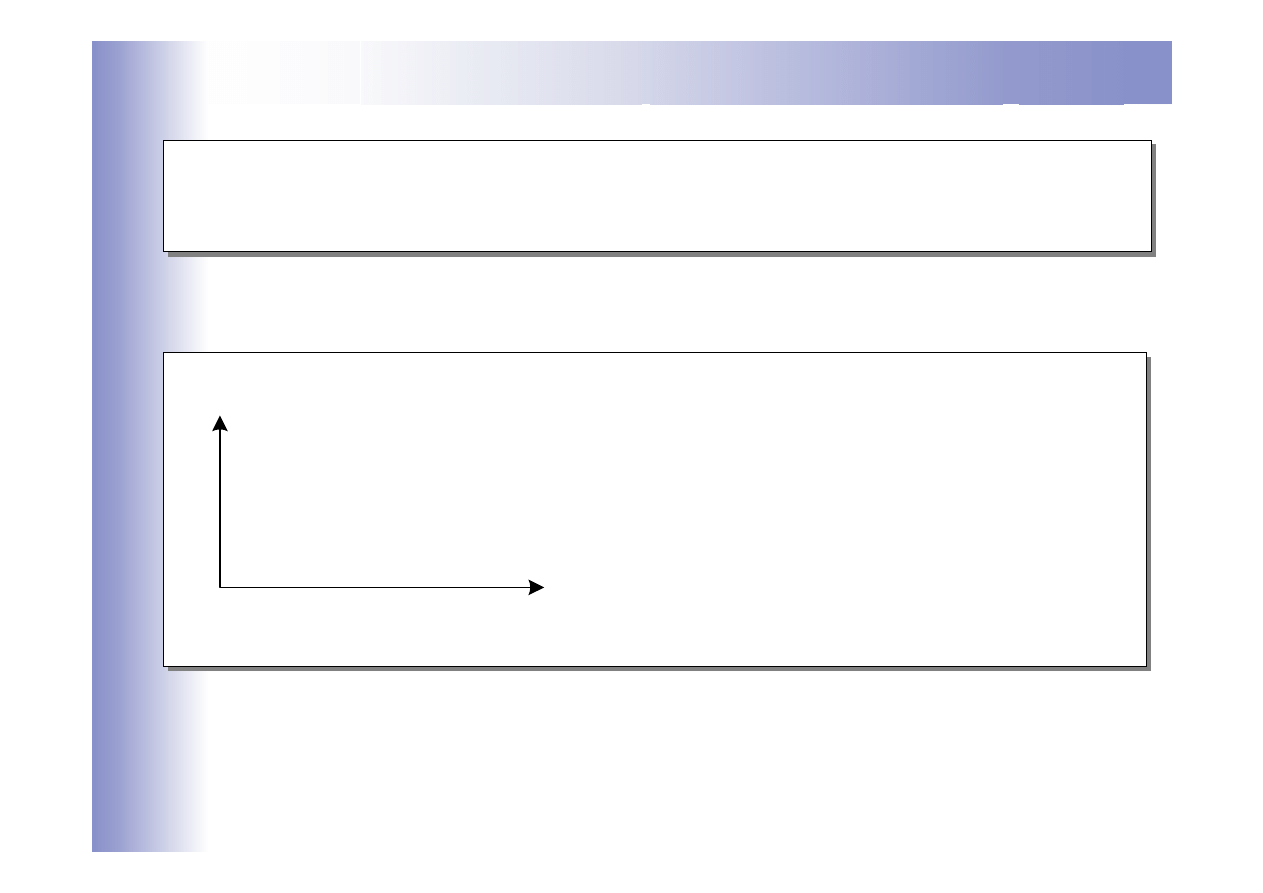
Własności układów
Właściwości dynamiczne – prezentacja przebiegu wielkości wyjściowej
y(t) po wprowadzeniu do układu wymuszenia u(t)
Właściwości dynamiczne – prezentacja przebiegu wielkości wyjściowej
y(t) po wprowadzeniu do układu wymuszenia u(t)
Postać charakterystyki w typowym układzie współrzędnych:
Postać charakterystyki w typowym układzie współrzędnych:
y
u
t
Gdzie: u - sygnał wejściowy
y - sygnał wyjściowy
t - czas [s]
Metody wyznaczania odpowiedzi układu y(t)
Klasyczna:
• Założyć warunki początkowe
• Rozwiązać równanie różniczkowe
Klasyczna:
• Założyć warunki początkowe
• Rozwiązać równanie różniczkowe
u
b
dt
u
d
b
dt
u
d
b
y
a
dt
y
d
a
dt
y
d
a
m
m
m
m
m
m
n
n
n
n
n
n
0
1
1
1
0
1
1
1
+
+
+
=
+
+
+
−
−
−
−
−
−
K
K
Operatorowa:
Operatorowa:
)]
(
)
(
[
)
(
)]
(
[
)
(
1
1
s
u
s
G
L
t
f
s
y
L
t
f
−
−
=
=
=
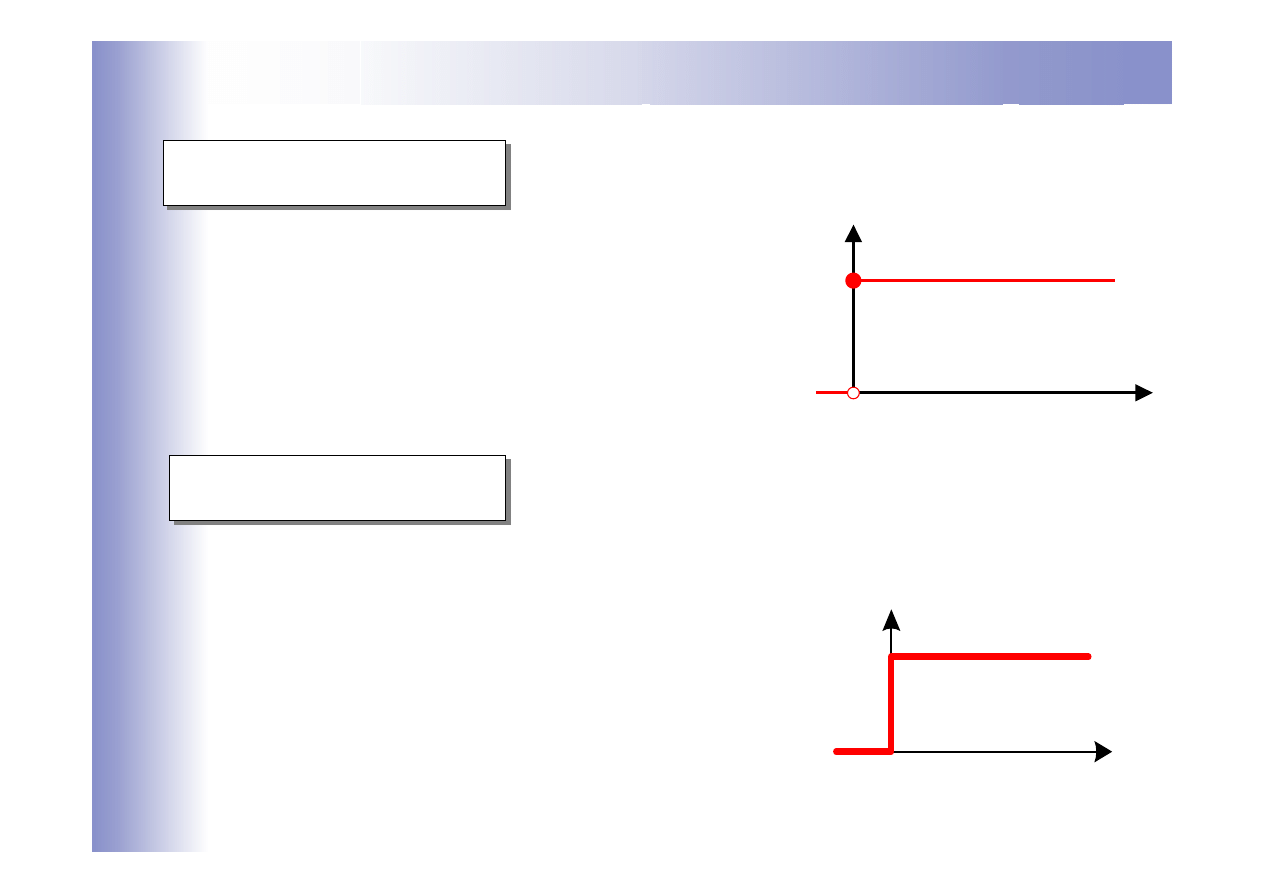
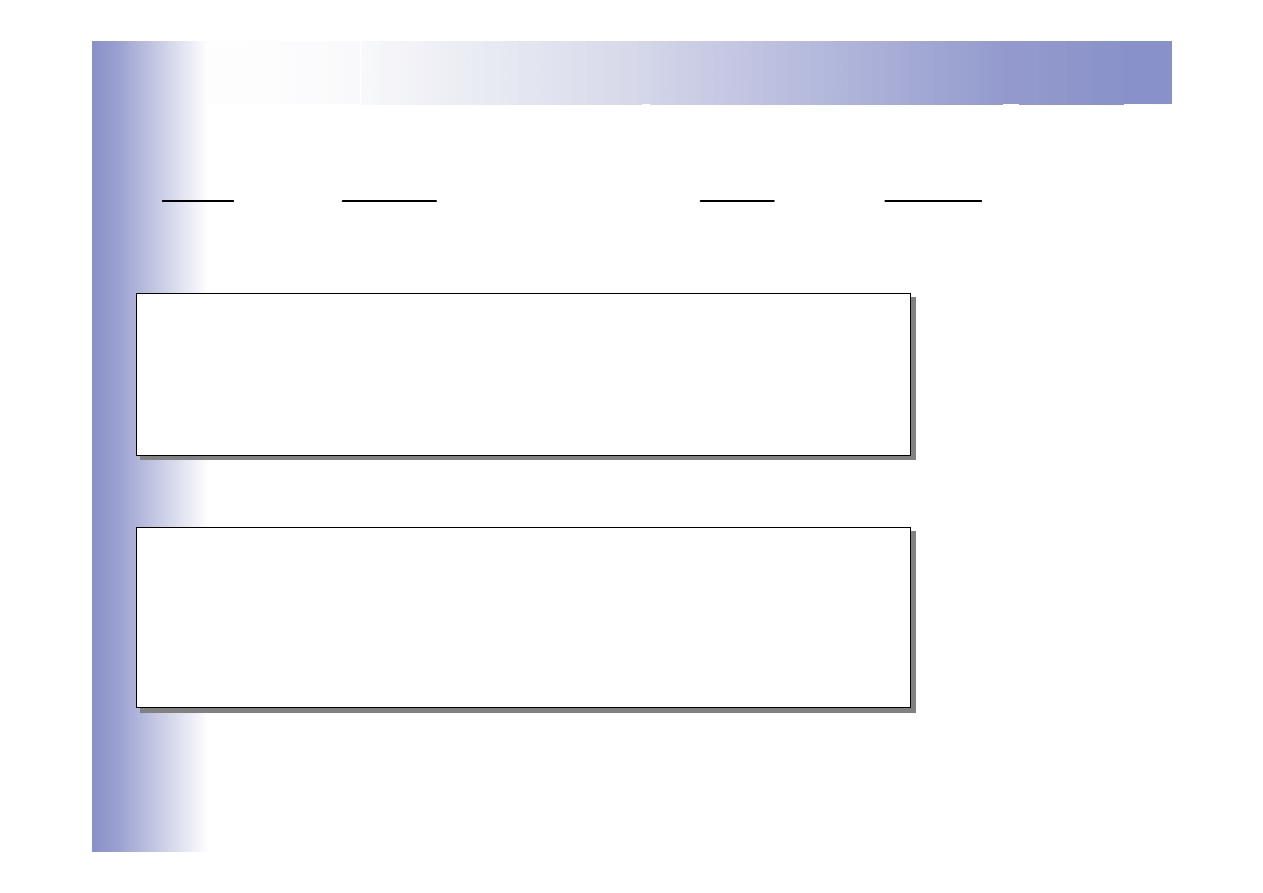
Typowe wymuszenia
Skok jednostkowy
Skok jednostkowy
t
u
1(t)
=
0
1(t)
u(t)
dla t ≥ 0
dla t < 0
u
u
st
t
=
⋅
0
1(t)
u
u(t)
st
dla t ≥ 0
dla t < 0
Skok o wartość stałą
Skok o wartość stałą
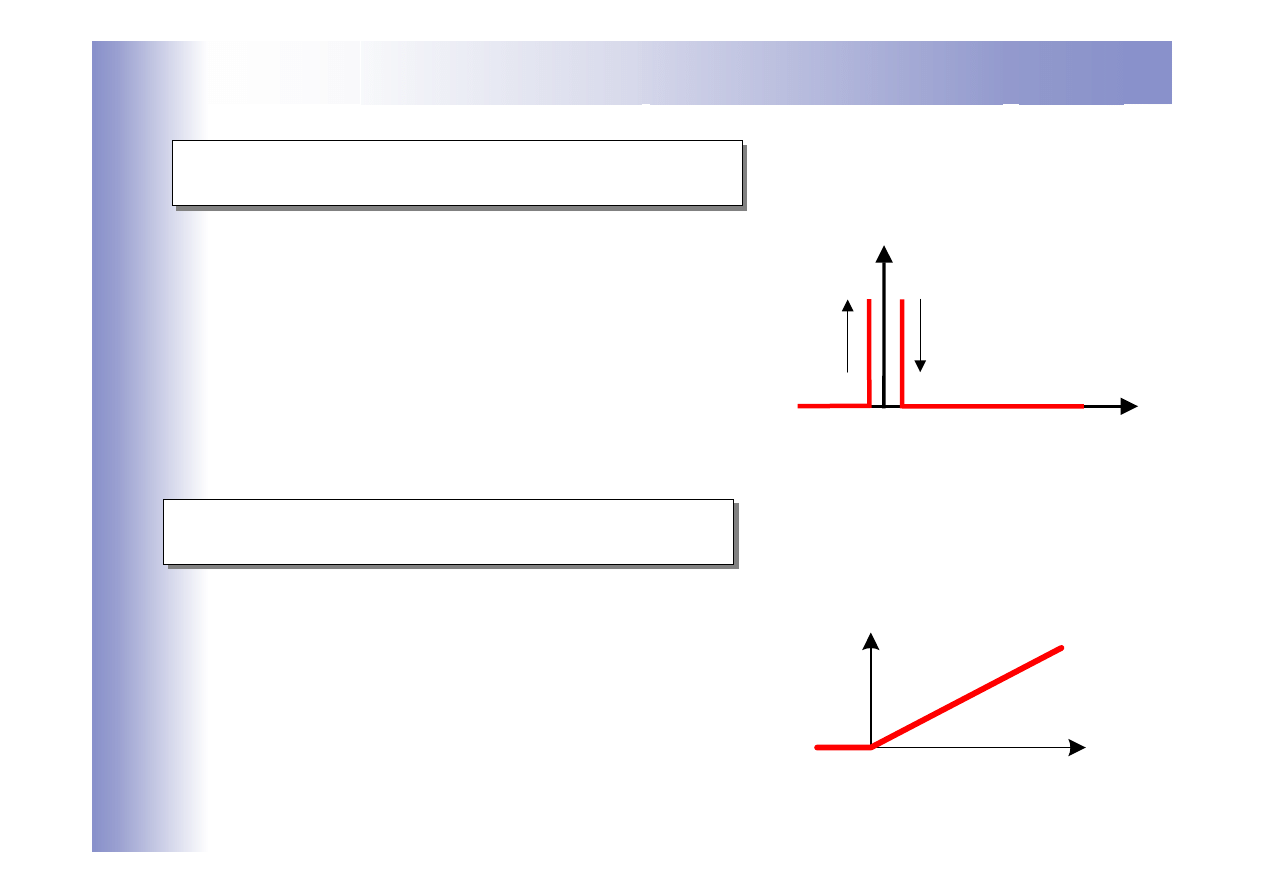
Typowe wymuszenia
t
u
Wymuszenie liniowo narastające
Wymuszenie liniowo narastające
t
a
u(t)
⋅
=
Impuls jednostkowy – Delta Diraca
Impuls jednostkowy – Delta Diraca
t
u
0
∞
∞
=
=
0
(t)
u(t)
δ
dla t ≠ 0
dla t = 0
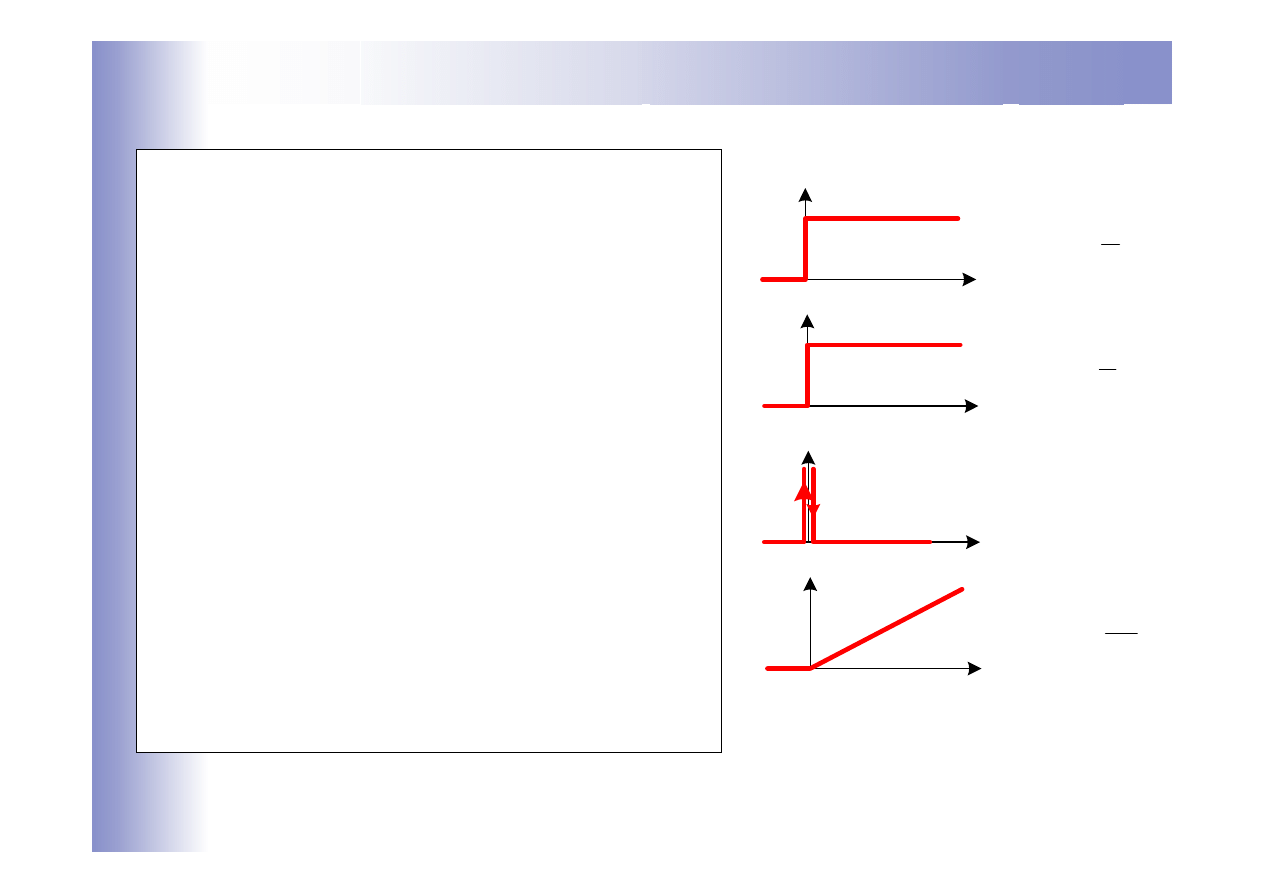
Typowe wymuszenia
• Wymuszenie skokowe jednostkowe
u(t)=1(t)
• Wymuszenie skokowe o wartość stałą
u(t)=u
st
·1(t)
• Wymuszenie w postaci impulsu
u(t)=δ(t) Delta Diraca
• Wymuszenie liniowo narastające
u(t)= a·t
u
1
t
u
u
st
t
t
u
t
u
s
s
u
1
)
(
=
st
u
s
s
u
1
)
(
=
1
)
(
=
s
u
2
)
(
s
a
s
u
=
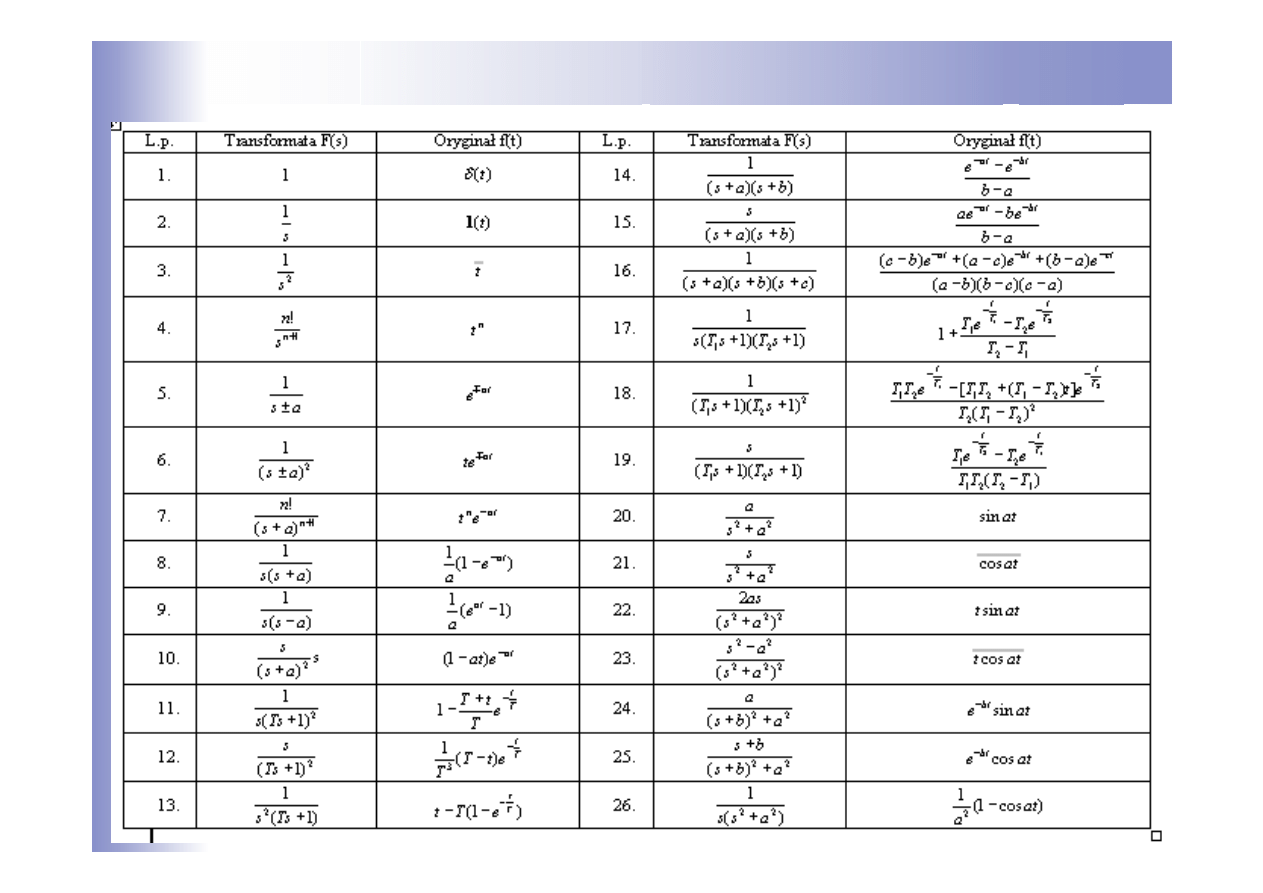
Tablica transformat
Opis układów z użyciem współrzędnych stanu
=
)
(
)
(
)
(
)
(
2
1
t
u
t
u
t
u
t
U
n
M
=
)
(
)
(
)
(
)
(
2
1
t
x
t
x
t
x
t
X
k
M
=
)
(
)
(
)
(
)
(
2
1
t
y
t
y
t
y
t
Y
l
M
wektor wejść
wektor stanu
wektor wyjść
W ogólnym opisie układów wielowymiarowych poszczególne wielkości
określone są w postaci wektorów i oznaczają:
Zbiór wszystkich możliwych
wartości wektora stanu X(t) w
chwilach t tworzy przestrzeń
stanów układu (przestrzeń
fazową).
Zbiór wartości wektora stanu
układu w kolejnych chwilach
czasu tworzy w tej przestrzeni
krzywą, zwaną trajektorią
stanu układu (trajektorią
fazową).
Zbiór wszystkich możliwych
wartości wektora stanu X(t) w
chwilach t tworzy przestrzeń
stanów układu (przestrzeń
fazową).
Zbiór wartości wektora stanu
układu w kolejnych chwilach
czasu tworzy w tej przestrzeni
krzywą, zwaną trajektorią
stanu układu (trajektorią
fazową).

Równania stanu i wyjść
Ogólna postać równania stanu:
)]
(
),
(
[
)
(
t
U
t
X
F
t
X
=
z n warunkami początkowymi:
0
0
)
(
X
t
X
=
=
=
=
=
0
0
2
1
2
1
10
0
1
2
1
2
1
1
1
)
(
);
;
,
,
,
;
,
,
,
(
)
(
)
(
);
;
,
,
,
;
,
,
,
(
)
(
n
n
k
n
n
n
k
n
x
t
x
t
u
u
u
x
x
x
f
dt
t
dx
x
t
x
t
u
u
u
x
x
x
f
dt
t
dx
K
K
L
L
L
L
L
L
L
L
L
L
L
L
L
L
L
L
L
L
L
L
L
K
K
)]
(
),
(
[
)
(
t
U
t
X
G
t
Y
=
Ogólna postać równania wyjść:
=
=
)
;
,
,
,
;
,
,
,
(
)
(
)
;
,
,
,
;
,
,
,
(
)
(
2
1
2
1
2
1
2
1
1
1
t
u
u
u
x
x
x
g
t
y
t
u
u
u
x
x
x
g
t
y
k
n
l
l
k
n
K
K
L
L
L
L
L
L
L
L
L
L
L
L
L
L
L
L
K
K
Zlinearyzowane równania stanu
Po linearyzacji w otoczeniu wybranego stanu ustalonego (nominalnego
punktu pracy), równania przyjmują wówczas postać:
t
t
f
u
u
f
u
u
f
u
u
f
x
x
f
x
x
f
x
x
f
dt
t
dx
k
k
n
n
∂
∂
+
∂
∂
+
+
∂
∂
+
∂
∂
+
∂
∂
+
+
∂
∂
+
∂
∂
=
1
1
2
2
1
1
1
1
1
2
2
1
1
1
1
1
)
(
K
K
t
t
g
u
u
g
u
u
g
u
u
g
x
x
g
x
x
g
x
x
g
y
k
k
n
n
∂
∂
+
∂
∂
+
+
∂
∂
+
∂
∂
+
∂
∂
+
+
∂
∂
+
∂
∂
=
1
1
2
2
1
1
1
1
1
2
2
1
1
1
1
1
K
K
...
...
)
(
)
(
)
(
)
(
)
(
t
U
t
B
t
X
t
A
t
X
+
=
)
(
)
(
)
(
)
(
)
(
t
U
t
D
t
X
t
C
t
Y
+
=
przy czym:
A(t) – macierz układu stopnia n×n
B(t) – macierz wejść stopnia n×k
C(t) – macierz wyjść stopnia l×n
D(t) – macierz transmisyjna układu stopnia l×k
Układ niestacjonarny

Równania stanu układów liniowych stacjonarnych
Układ stacjonarny - o parametrach niezależnych od czasu
W przypadku szczególnym, gdy układ jest liniowy stacjonarny,
pochodne cząstkowe względem zmiennych x
1
,…,x
n
,…,u
1
,…,u
k
nie
zawierają czasu i pochodne cząstkowe względem czasu są równe
zeru. Elementy macierzy są wówczas stałe i równania stanu można
zapisać w postaci:
)
(
)
(
)
(
)
(
)
(
)
(
t
DU
t
CX
t
Y
t
BU
t
AX
t
X
+
=
+
=

Układy liniowe
Układ liniowy – układ, w którym zachowana jest zasada superpozycja.
Modele matematyczne układów liniowych są opisywane liniowymi
równaniami algebraicznymi lub liniowymi równaniami
różniczkowymi, np.:
Układ liniowy – układ, w którym zachowana jest zasada superpozycja.
Modele matematyczne układów liniowych są opisywane liniowymi
równaniami algebraicznymi lub liniowymi równaniami
różniczkowymi, np.:
u
2
u
0,5
y
2
y
y
2
..
.
..
⋅
+
⋅
=
⋅
+
+
⋅
Układ nieliniowy – układy w których nie jest zachowana zasada
superpozycja. Układ, w którym y(0)≠0, np.:
opisanym równaniem algebraicznym y=u+1.
Układ nieliniowy – układy w których nie jest zachowana zasada
superpozycja. Układ, w którym y(0)≠0, np.:
opisanym równaniem algebraicznym y=u+1.
Pojęcia podstawowe
ZASADA SUPERPOZYCJI
ZASADA SUPERPOZYCJI
y(u
1
+u
2
)=y(u
1
)+y(u
2
)
gdzie: y(u
i
) oznacza odpowiedź układu y na wymuszenie u
i
;
oraz y(0)=0
∆y(u
1
+u
2
)= ∆y(u
1
)+ ∆y(u
2
)
gdzie: ∆y(u)= ∆y(u)+ ∆y(0) lub ogólnie ∆y(u)= ∆y(u+u
0
)+ ∆y(u
0
)
Postać ogólna:
Postać ogólna:
Wyszukiwarka
Podobne podstrony:
PA2 opis matematyczny [tryb zgodności]
PA2 opis matemat
PA2 opis matemat
PA2 opis matematyczny [tryb zgodności]
PA2 opis matemat
PA2 opis matematyczny [tryb zgodności]
calkowanie 1 opis matematyczny Nieznany
02 Opis matematyczny układów liniowych
02 Opis matematyczny układów liniowych
10 Matematyczny opis zmienności
2002m matematyczno przyrodniczy standard poznaj zainteresowania opis
Opis zawodu Matematyk, Opis-stanowiska-pracy-DOC
Opis - MuPAD Pro, Matematyka, fizyka etc, MuPad Pro 3.1.1 i Cabri geometre 2
Podstawy matematyki finansowej opis funkcji
Opis - Cabri geometre 2, Matematyka, fizyka etc, MuPad Pro 3.1.1 i Cabri geometre 2
Matematyczny opis krzepniecia odlewów
Opis rozdziału VI książki „Dziecięca matematyka” p Edyty Gruszczyk Kolczyńskiej
więcej podobnych podstron