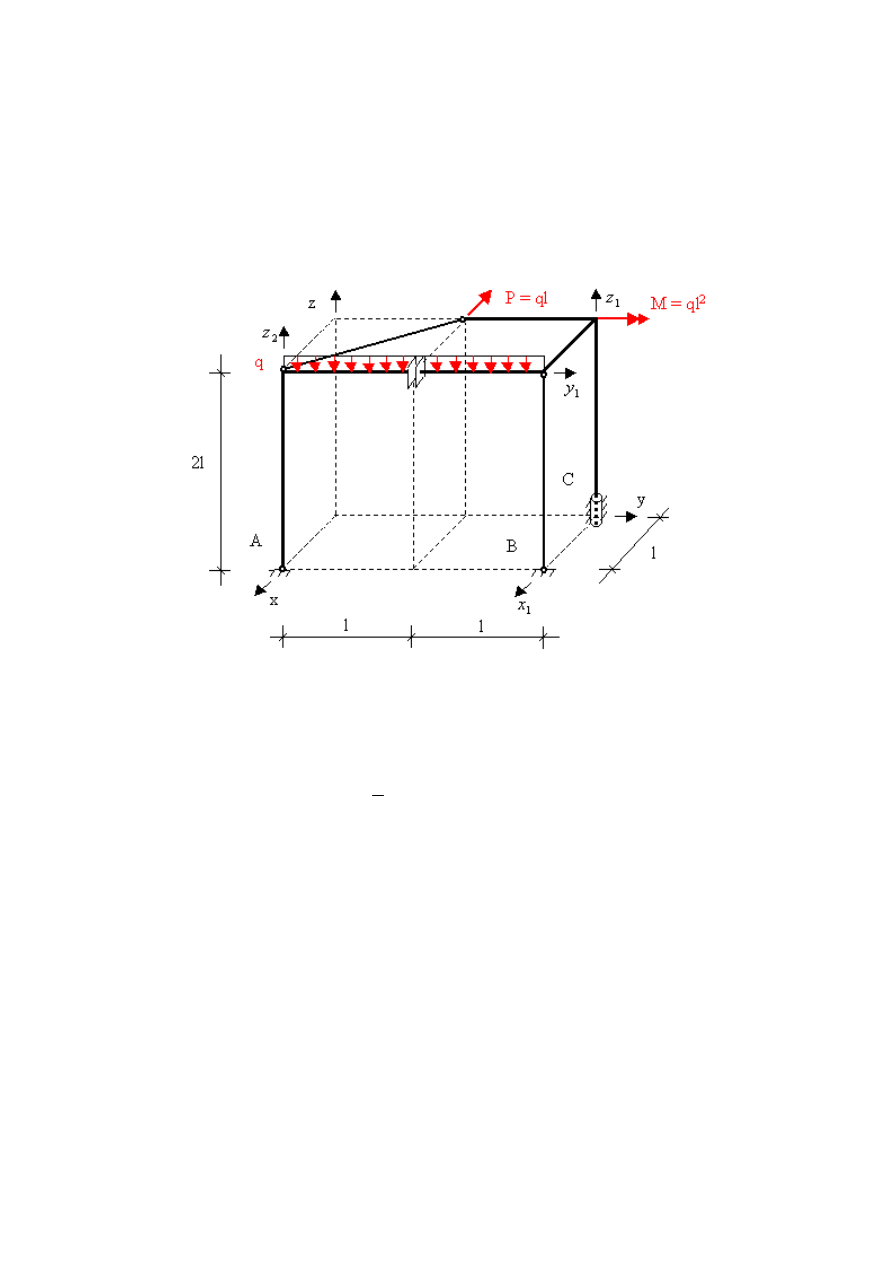
Przykład 5.3. Układ przestrzenny I
Wyznaczyć reakcje i siły w prętach zakończonych obustronnie przegubami, w ramie
przestrzennej o podanym schemacie.
Rozwiązanie.
Dowolny przestrzenny układ sił
i
P znajduje się w równowadze, jeżeli sumy rzutów
wszystkich sił na trzy osie układu są równe zeru i sumy momentów wszystkich sił względem
trzech osi układu są równe zeru. Tak więc układ równań równowagi ma postać
∑
∑
∑
=
=
=
0
,
0
,
0
iz
iy
ix
P
P
P
∑
∑
∑
=
=
=
0
,
0
,
0
iz
iy
ix
M
M
M
Wskazówki metodyczne:
- uwalniamy ciała sztywne z więzów i zastępujemy ich działanie reakcjami (siły bierne),
- rysujemy siły czynne i bierne (reakcje więzów), które obciążają te ciała,
2
- sprawdzamy czy układ sił jest statycznie wyznaczalny i obieramy układ współrzędnych
xyz,
- badamy równowagę sił czynnych (obciążenia zewnętrzne) i sił biernych (reakcje)
wykorzystując równania równowagi zapisane powyżej; należy dążyć do tego, aby
równania były w miarę możliwości równaniami z jedną niewiadomą,
- rozwiązujemy układ równań i wyznaczamy wielkości niewiadome,
- sprawdzamy poprawność wykonanych obliczeń, korzystając z równoważnego warunku
równowagi.
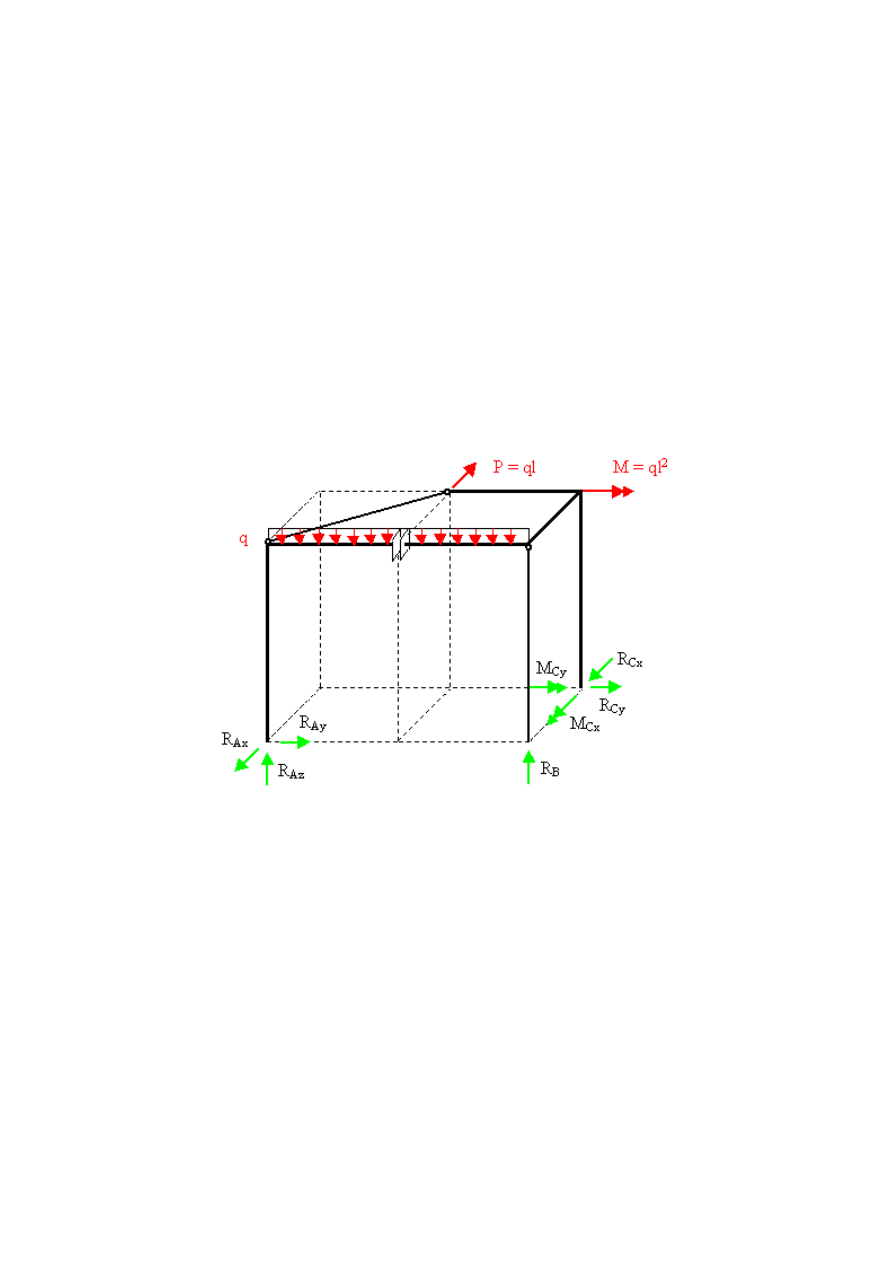
Uwalniamy układ przestrzenny z więzów wprowadzając odpowiadające im reakcje.
W/w układ przestrzenny możemy potraktować jako dwa elementy przestrzenne połączone ze
sobą za pośrednictwem teleskopu i ściągu. W punkcie A elementu I występuje podpora
przegubowa nieprzesuwna. Element II oparty jest na podporze stałej przegubowej w punkcie
B za pośrednictwem pręta dwuprzegubowego, a punkcie C posiada oparcie w postaci tulei. W
prętach (obustronnie zakończonych przegubami), które nie są obciążone w przęśle występują
tylko siły osiowe. Z równowagi węzła B wynika, że siła S
1
ma tę samą wartość i kierunek
działania co reakcja R
B
. Nie znamy dwunastu reakcji i oddziaływań: R
Ax
, R
Ay
, R
Az
, R
B
(lub S
1
),
R
Cx
, R
Cy
, M
Cx
, M
Cy
, R
1y
, M
1x
, M
1z
i S
2
. Dla przedstawionego na schemacie układu ramowego
można zapisać dwanaście warunków równowagi (2 x 6). Zatem układ jest statycznie
wyznaczalny. Rozwiązanie tego zadania może przebiegać na wiele sposobów. Zapisując
3
kolejne równania równowagi należy dążyć do tego, aby były to równania z jedną niewiadomą
( o ile to możliwe). Pamiętać należy przy tym, że moment siły (siła ≠ 0) względem osi jest
równy zeru, jeśli wektor siły jest równoległy do osi lub linia działania siły przecina się z osią.
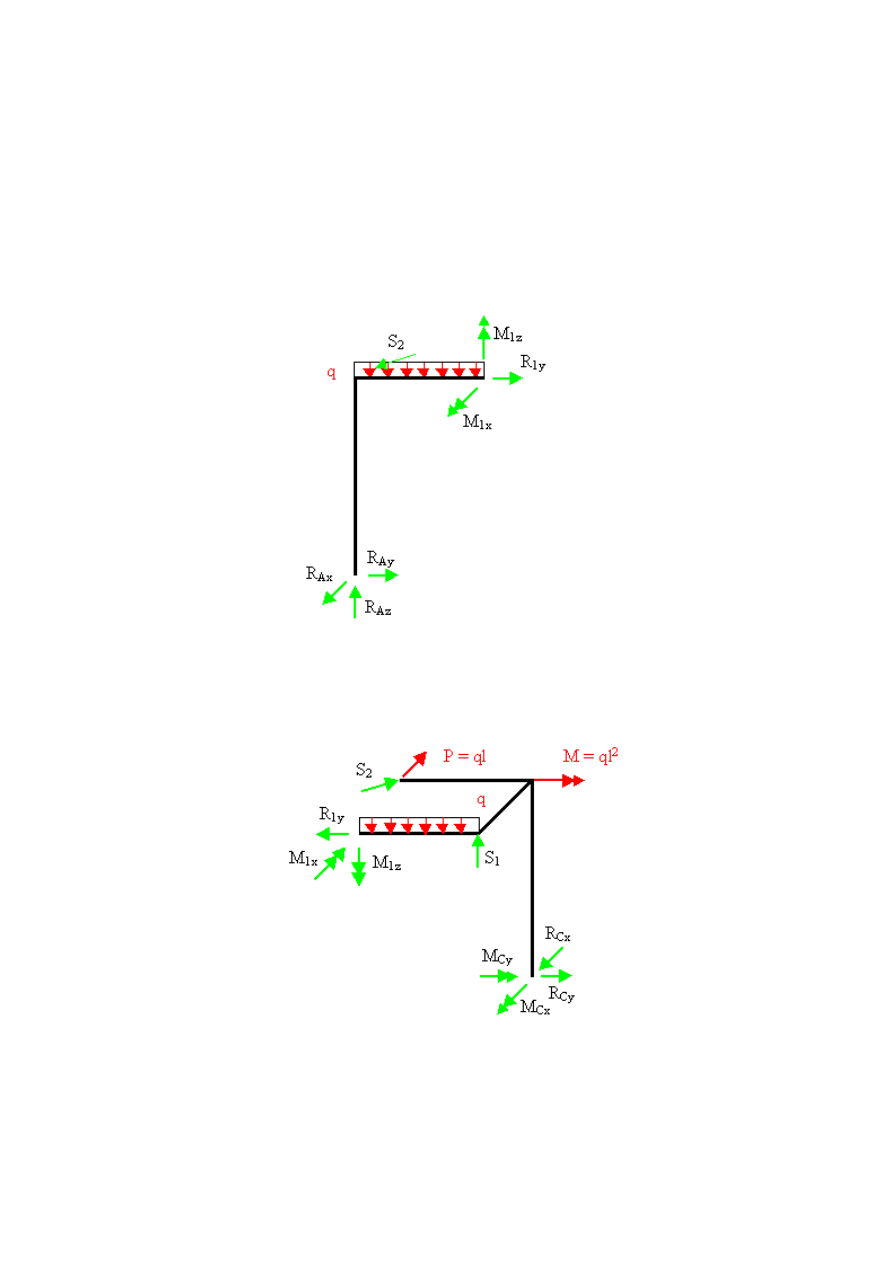
Należy zauważyć, że do rozwiązania niniejszego zadania wystarczy wykorzystać dziewięć
równań, bez konieczności obliczania oddziaływań w teleskopie.
Element I
Element II
4
Zapisujemy kolejno warunki równowagi. Należy zauważyć, że z uwagi na sposób połączenia
elementów (teleskop, ściąg poziomy), obciążenia pionowe z elementu I na II i z elementu II
na I nie przekazują się.
∑
= 0
I
iz
P
0
=
− ql
R
Az
→
ql
R
Az
=
∑
= 0
II
iz
P
0
1
=
− ql
S
→
ql
S
=
1
Warunek równowagi dla całości
∑
= 0
iz
P
spełniony jest tożsamościowo.
Teleskop nie przenosi także momentu skręcającego (
0
1
=
y
M
). Zatem
0
1
=
∑
I
iy
M
0
2
=
⋅
−
l
R
Ax
→
0
=
Ax
R
Z warunku równowagi
0
1
=
∑
II
iy
M
otrzymujemy równanie z dwiema niewiadomymi
0
2
=
+
+
⋅
−
Cy
Cy
M
M
l
R
. Można je ewentualnie wykorzystać po rozwiązaniu zadania do
sprawdzenia poprawności obliczeń.
Równania równowagi możemy zapisywać zarówno dla całego układu przestrzennego, jak i
dla każdej z części z osobna.
0
1
=
∑
ix
M
0
2
2
=
⋅
+
+
⋅
−
l
ql
M
l
R
Cx
Az
→
0
=
Cx
M
0
=
∑
iy
M
0
2
2
2
=
+
⋅
−
+
⋅
+
⋅
−
⋅
−
Cy
Az
B
M
l
ql
ql
l
ql
l
R
l
R
→
2
ql
M
Cy
=
0
1
=
∑
iz
M
0
2
=
⋅
+
⋅
+
⋅
−
l
R
l
R
l
ql
Ax
Ay
→
ql
R
Ay
=
∑
= 0
iy
P
0
=
+
Cy
Ay
R
R
→
ql
R
R
Ay
Cy
−
=
−
=
Znak minus oznacza, że zwrot wektora siły R
Cy
jest przeciwny do założonego.
∑
= 0
ix
P
0
=
−
+
ql
R
R
Cx
Ax
→
ql
R
Cx
=
Siłę S
2
w ściągu obliczymy z warunku (teleskop przekazuje tylko siłę prostopadłą do
powierzchni teleskopu)
∑
= 0
I
ix
P
0
2
2
2
=
+ S
R
Ax
→
0
2
=
S
Warunek równowagi dla całości
∑
= 0
II
iz
P
spełniony jest tożsamościowo.
W celu sprawdzenia poprawności obliczeń korzystamy z warunku równowagi, z którego nie
korzystaliśmy poprzednio
0
2
=
∑
iz
M
0
2
=
⋅
−
⋅
−
⋅
l
R
l
R
l
ql
Cy
Cx
→
0
2
2
2
2
=
+
−
ql
ql
ql
W prętach zakończonych obustronnie przegubami występują siły:
ql
S
=
1
(ściskająca) i
0
2
=
S
.
Wyszukiwarka
Podobne podstrony:
Mechanika Techniczna I Skrypt 4 5 4 Układ przestrzenny II
Mechanika Techniczna I Skrypt 4 2 4 Układ belkowy złożony
Mechanika Techniczna I Skrypt 4 2 4 Układ belkowy złożony
Mechanika Techniczna I Skrypt 2 4 Kinematyka
Mechanika Techniczna I Skrypt 1 2 1 Okreslenie i rodz
Mechanika Techniczna I Skrypt 5 03
Mechanika Techniczna I Skrypt 3 14
Mechanika Techniczna I Skrypt 5 02
Mechanika Techniczna I Skrypt 3 7
Mechanika Techniczna I Skrypt 3 1
Mechanika Techniczna I Skrypt przyklady do rozwiazania id 291
Mechanika Techniczna I Skrypt 2 8 Prety, układy pretów
Mechanika Techniczna I Skrypt 5 10
Mechanika Techniczna I Skrypt 5 06
Mechanika Techniczna I Skrypt 3 12
Mechanika Techniczna I Skrypt 2 14 Zagadnienia wybrane
Mechanika Techniczna I Skrypt 1 7 1 Przedmiot dynamiki
Mechanika Techniczna I Skrypt 5 08
Mechanika Techniczna I Skrypt 3 9
więcej podobnych podstron