1
S-
Wydział Inżynierii Elektrycznej i Komputerowej
Katedra Maszyn Elektrycznych,
Laboratorium Maszyn Elektrycznych
Ćwiczenie S – Maszyny synchroniczne
Badanie prądnicy synchronicznej przy pracy samotnej
1. Czynności wstępne
Zapoznanie się z budową prądnicy i danymi znamionowymi.
kVA
S
N
4
=
,
V
U
N
400
=
(
Υ
),
A
I
N
8
,
5
=
,
8
,
0
cos
=
N
ϕ
,
min
/
1500
=
N
n
,
Hz
f
N
50
=
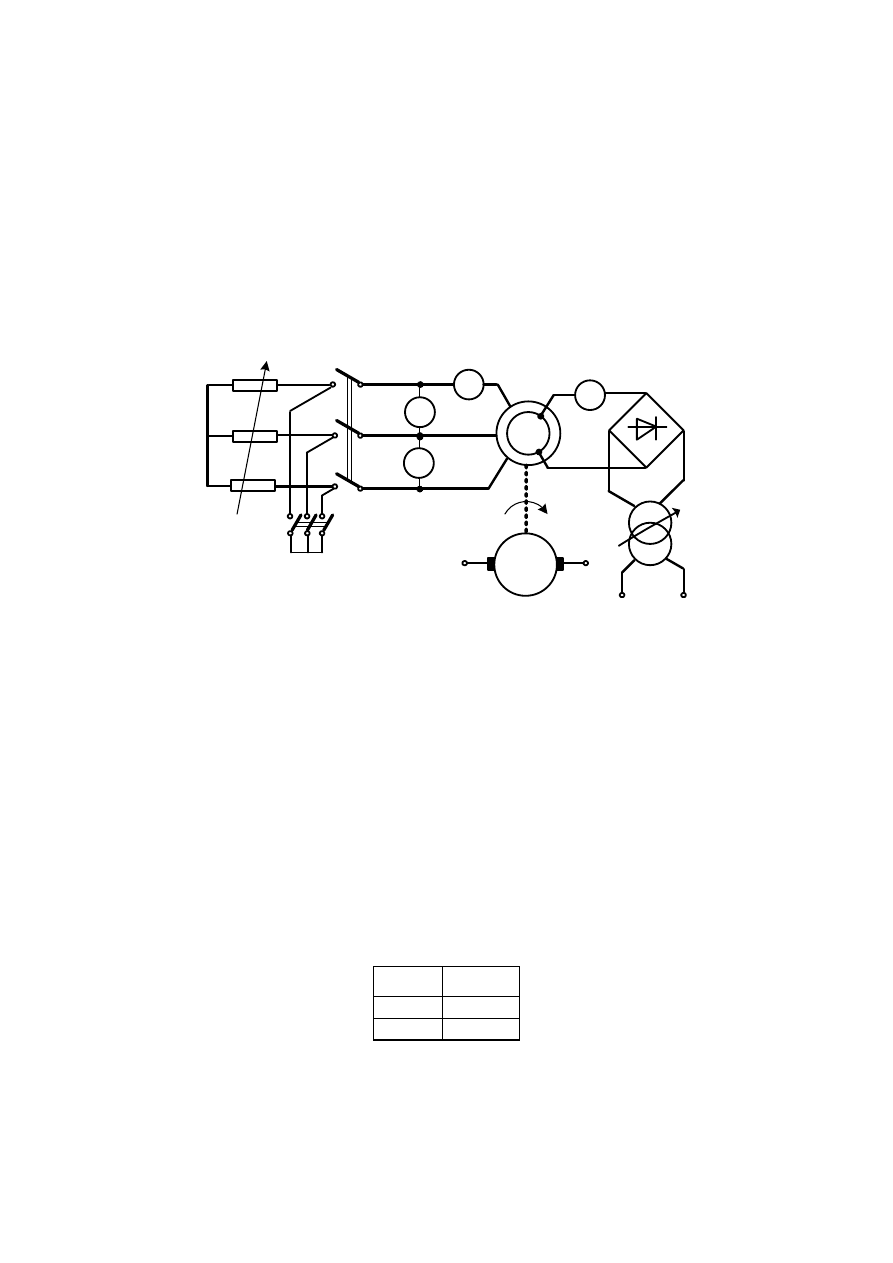
Połączyć układ pomiarowy według poniższego schematu.
V
A
GS
A
PS
s
I
f
I
Hz
J
K
n
R
R
R
U
V
W
s
U
Napędzić wirnik badanej prądnicy z prędkością znamionową, przy pomocy sprzęgniętego z
nią silnika prądu stałego.
2. Charakterystyka biegu jałowego
Charakterystyka biegu jałowego jest to zależność napięcia stojana (twornika) od prądu
wzbudzenia -
)
(
f
s
I
f
U
=
0
nieobciążonej prądnicy (
0
=
s
I
), przy stałych obrotach wirnika
n
,
w szczególności przy
N
n
n
=
(
Hz
f
N
50
=
). W celu wyznaczenia charakterystyki należy
zasilić wirujące uzwojenie wzbudzenia prądem stałym
f
I o wartości zapewniającej
indukowanie się w rozwartych trójfazowych uzwojeniach stojana napięcia międzyfazowego
0
s
U o wartości ok.
N
U
2
,
1
. Zmniejszając prąd wzbudzenia do zera zapisujemy wartości
0
s
U w
funkcji
f
I . W szczególności należy odczytać wartość prądu wzbudzenia biegu jałowego
0
f
I
,
przy którym napięcie indukowane ma wartość znamionową
N
U . Otrzymana krzywa jest w
przybliżeniu zgodna z charakterystyką magnesowania obwodu magnetycznego.
Wyniki zapisujemy w tabeli:
f
I [A]
0
s
U
[V]
Napięcie
sz
U
występujące przy braku prądu wzbudzenia jest wywołane strumieniem
szczątkowym wirnika. Właściwą charakterystykę stanu jałowego otrzymuje się, przesuwając
charakterystykę zmierzoną, w prawo o wartości
f
I
∆
- rys.1.
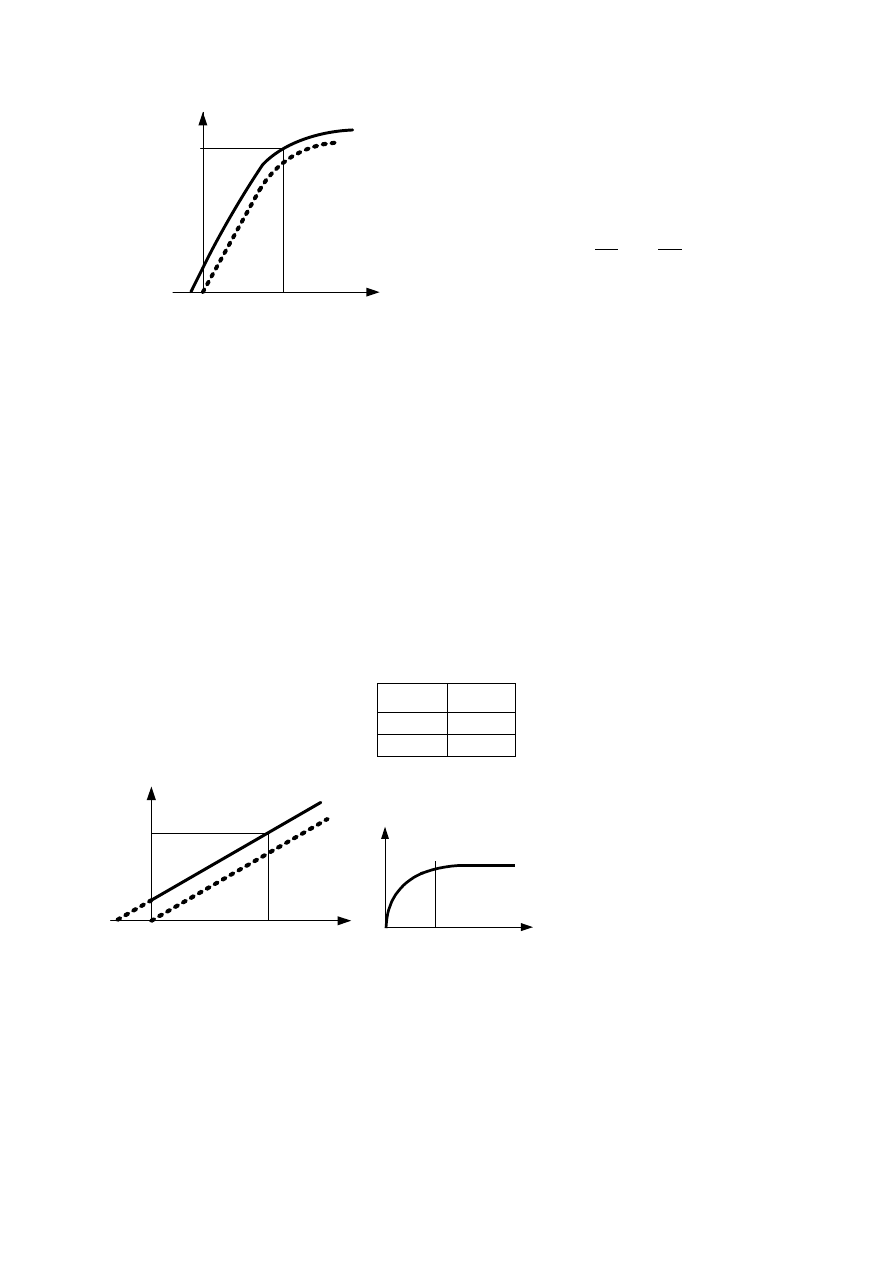
2
S-
0
s
U
f
I
0
f
I
N
U
f
I
∆
sz
U
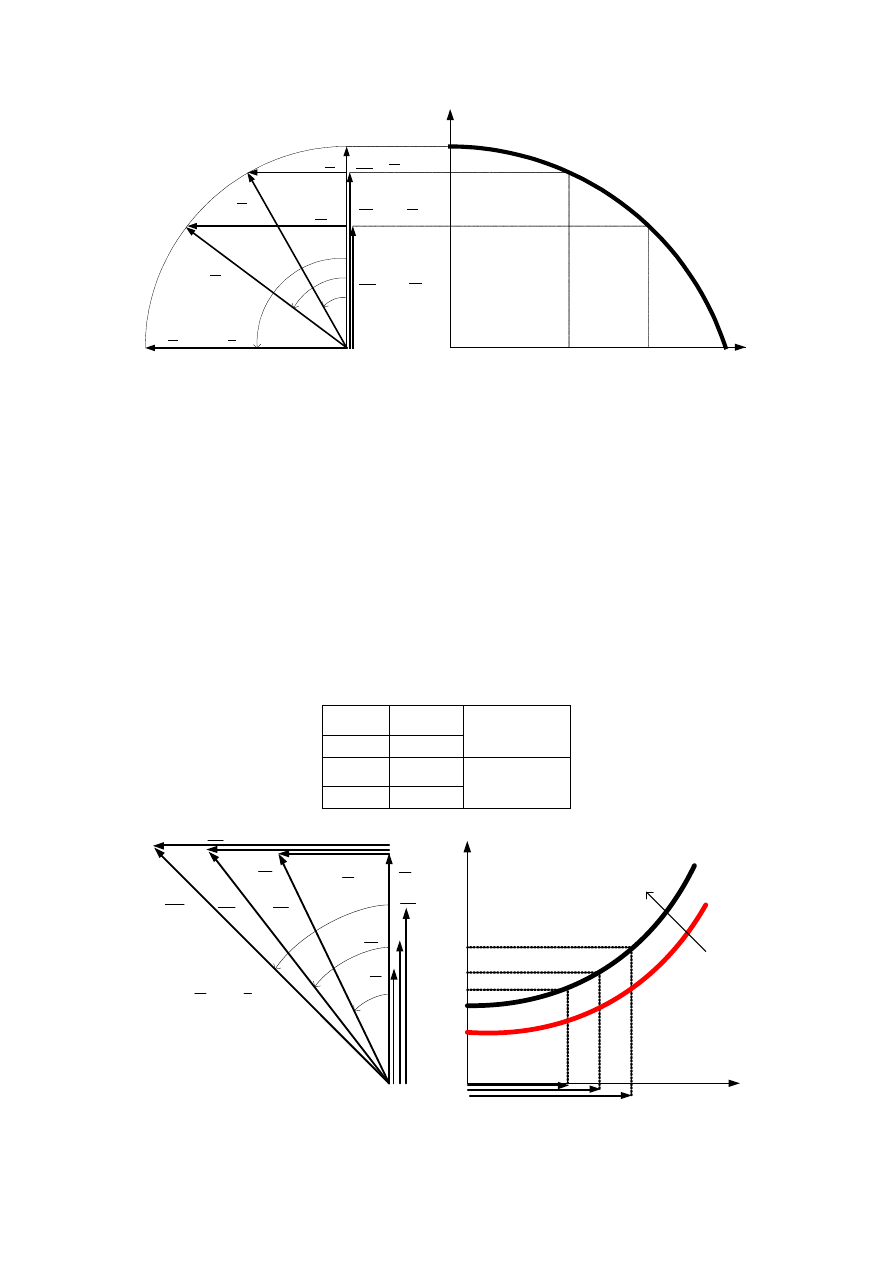
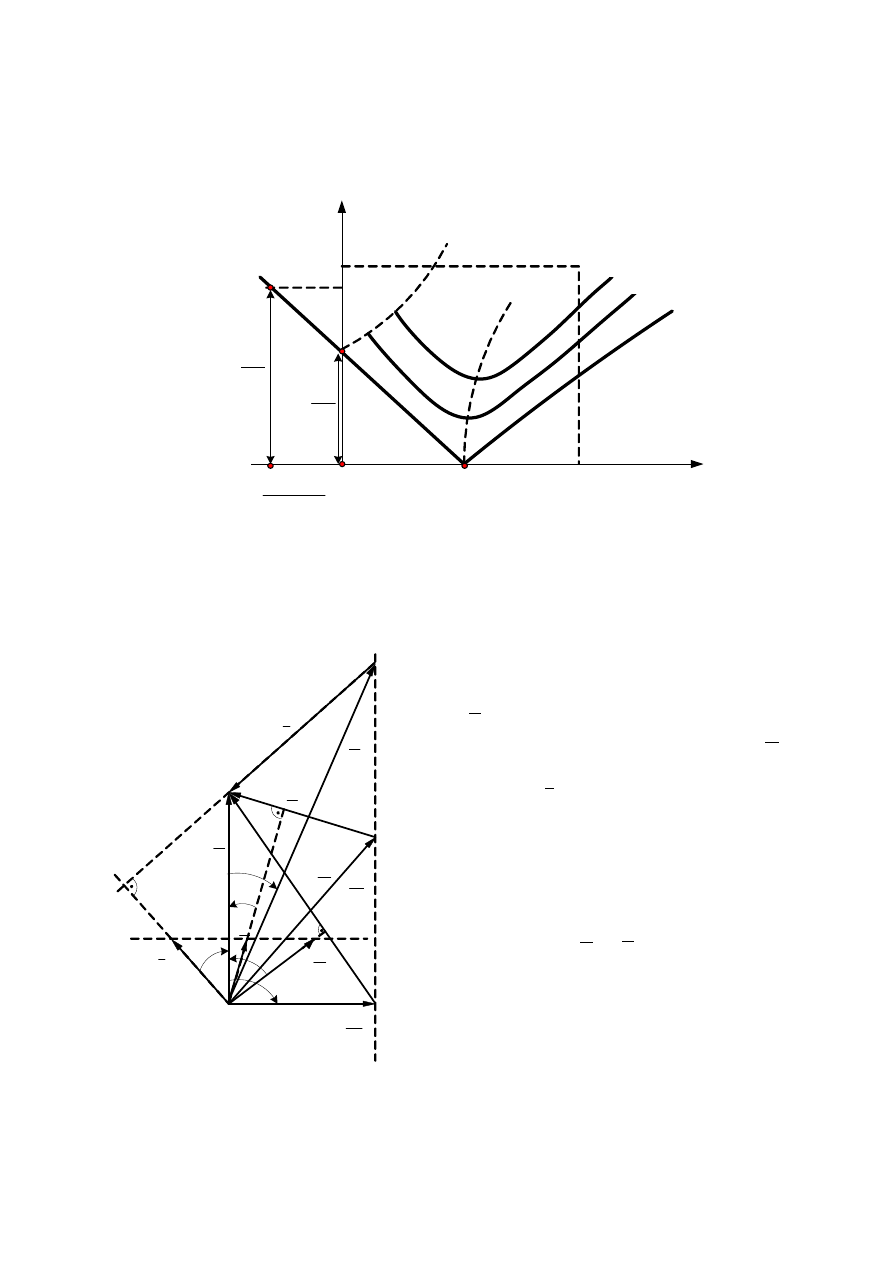
Rys.1. Charakterystyka biegu jałowego
Dla pomiarów wykonanych przy prędkości
różnej od znamionowej zmierzone napięcie
0
U
′
przelicza się na właściwe według
proporcji:
f
f
U
n
n
U
U
N
N
0
0
0
′
=
′
=
.
3. Charakterystyka zwarcia symetrycznego
Charakterystyka zwarcia symetrycznego ustalonego prądnicy jest zależnością ustalonego
prądu płynącego w zwartych uzwojeniach stojana (twornika) od prądu wzbudzenia
)
(
f
sk
I
f
I
=
, przy stałej prędkości obrotowej
n
. Przy wyłączonym wzbudzeniu -
0
=
f
I
i
napędzaniu wirnika z prędkością bliską znamionowej należy zewrzeć zaciski trójfazowego
uzwojenia stojana przewodami o jednakowej, jak najmniejszej rezystancji. Następnie
zwiększamy prąd wzbudzenia do wartości
fk
I przy której w zwartych obwodach stojana
płyną prądy o wartości znamionowej
N
I . Zmniejszając prąd wzbudzenia do zera zapisujemy
wartości
sk
I w funkcji
f
I . Ze względu na liniowość charakterystyki wystarczy wyznaczyć jej
kilka punktów. Prąd
sz
I płynący w stojanie przy braku prądu wzbudzenia jest wymuszony
napięciem szczątkowym. Właściwą charakterystykę otrzymuje się, przesuwając zmierzoną w
prawo o
f
I
∆
- rys.2.
Wyniki zapisujemy w tabeli, jak niżej:
f
I [A]
sk
I [A]
f
I
fk
I
s
I
sz
I
sN
I
f
I
∆
sk
I
N
n
15
,
0
n
Rys.2. Charakterystyka zwarcia
symetrycznego
Następnie dla przykładowo wybranej wartości prądu wzbudzenia obserwujemy, że nawet
znaczny spadek obrotów wirnika nie ma wpływu na wartość prądu zwarcia.
Wyjaśnienie: Prąd stojana praktycznie nie zależy od obrotów wirnika (już od ok.
N
n
n
15
,
0
>
),
ponieważ można pominąć rezystancję stojana, która jest wtedy znacznie mniejsza od
reaktancji synchronicznej
d
X , a reaktancja ta jest proporcjonalna do częstotliwości
synchronicznej
s
f -
d
s
d
L
f
X
π
2
=
w równym stopniu jak siła elektromotoryczna -
f
s
f
s
f
f
I
f
k
I
k
I
kp
E
π
ω
2
=
=
Ω
=
.
Schemat zastępczy prądnicy dla stanu zwarcia przedstawia rys.3.
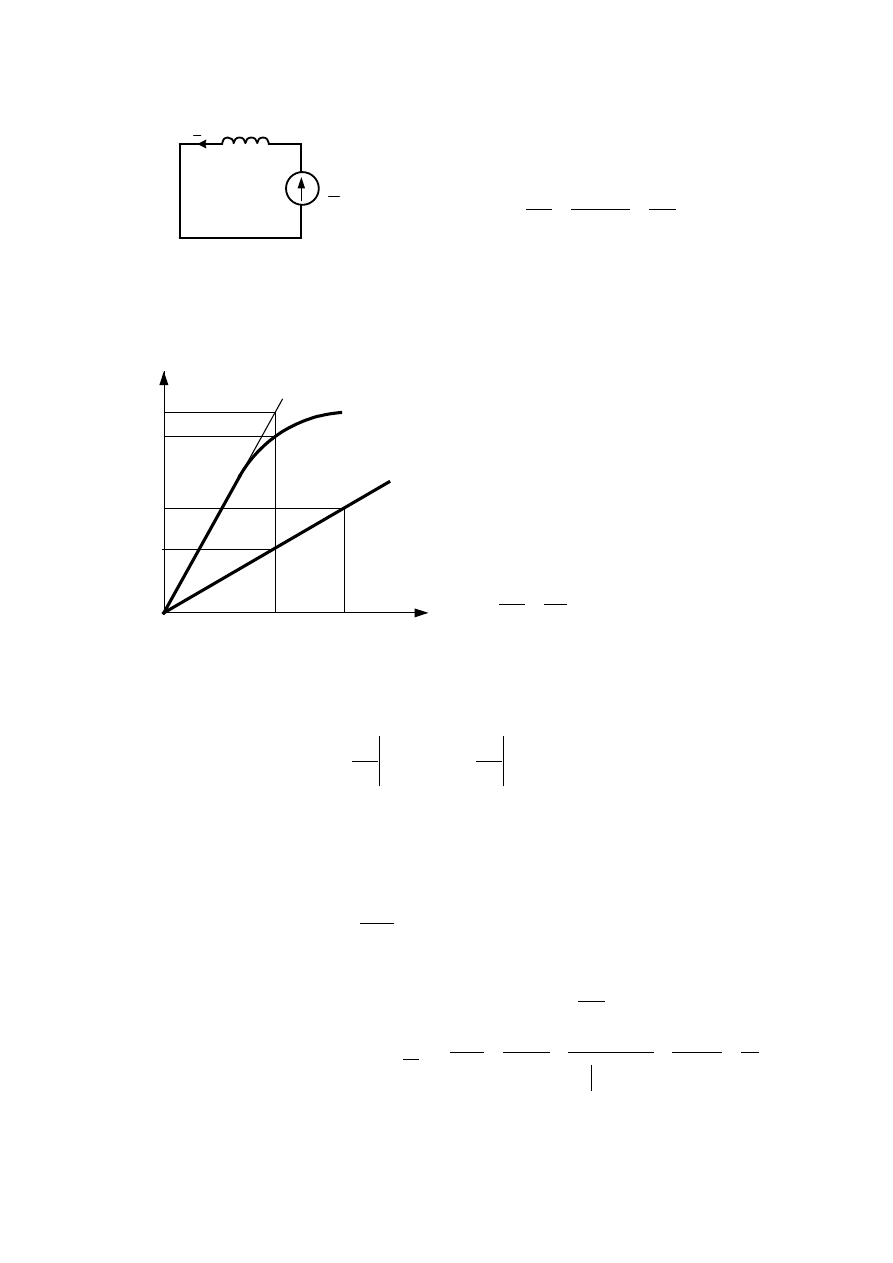
3
S-
d
jX
f
E
sk
I
Rys.3. Układ zastępczy prądnicy w stanie
zwarcia
const
L
kI
L
f
I
f
k
X
E
I
d
f
d
s
f
s
d
f
sk
=
=
=
=
π
π
2
2
Charakterystyki biegu jałowego i zwarcia rysuje się zwykle w jednym układzie
współrzędnych.
0
U
k
I
f
I
0
k
I
lin
U
0
0
U
k
I
0
f
I
N
I
fk
I
N
U
0
Rys.4. Charakterystyki biegu jałowego i
zwarcia
0
f
I
- znamionowy prąd wzbudzenia biegu
jałowego, czyli taki prąd wzbudzenia, przy
którym na biegu jałowym napięcie jest
znamionowe
N
U
U
=
0
,
fk
I - znamionowy prąd
wzbudzenia przy zwarciu, czyli taki prąd
wzbudzenia, przy którym w stanie zwarcia
prąd twornika jest znamionowy
N
k
I
I
=
. Iloraz
znamionowego
prądu
wzbudzenia
biegu
jałowego i znamionowego prądu wzbudzenia
przy zwarciu nazywa się stosunkiem zwarcia:
N
k
fk
f
k
I
I
I
I
k
0
0
=
=
. Im jest on większy, tym
większa jest przeciążalność prądnicy. Prakty-
cznie
7
,
0
4
,
0
÷
=
k
k
, przyjmując wartości
mniejsze dla maszyn dużych.
W oparciu o powyższe charakterystyki można wyznaczyć reaktancję synchroniczną
d
X .
Zgodnie z rys.3 i rys.4:
const
I
X
U
const
I
X
E
I
f
d
f
d
f
k
=
=
=
=
0
, gdzie:
k
I
U ,
0
- wartości
fazowe napięcia biegu jałowego i prądu zwarcia odczytane z charakterystyk przy tym samym
prądzie wzbudzenia. Należy zwrócić uwagę, że wskutek nasycania się obwodu
magnetycznego wartość
d
X maleje w miarę wzrostu prądu wzbudzenia.
Dlatego też, dla obliczenia jej wartości nienasyconej ekstrapoluje się liniowo charakterystykę
biegu jałowego rysując styczną, według której narastałoby napięcie, gdyby nie występowało
zjawisko nasycenia. Wtedy:
0
0
k
lin
d
I
U
X
=
.
Natomiast wartość
d
X uwzględniająca nasycenie odpowiadająca napięciu znamionowemu
nazywa się reaktancją synchroniczną nasyconą
dn
X
, gdzie
0
k
N
dn
I
U
X
=
.
W jednostkach względnych (patrz rys.3)
k
k
dn
N
dn
f
f
f
N
dn
N
N
dn
Nph
dn
dn
k
I
X
I
X
I
I
E
I
X
U
I
X
Z
X
X
1
0
0
=
=
=
=
=
=
.
Oznacza to, że względna wartość reaktancji podłużnej maszyny synchronicznej jest równa
odwrotności stosunku zwarcia.
4
S-
4. Charakterystyki zewnętrzne
Charakterystyki zewnętrzne prądnicy synchronicznej służą do oceny wielkości zmian napięcia
prądnicy przy przejściu od stanu jałowego do określonego obciążenia przy stałym prądzie
wzbudzenia i stałym współczynniku mocy oraz znamionowej prędkości obrotowej.
)
(I
f
U
=
przy
f
I ,
const
=
ϕ
cos
,
N
n
n
=
.
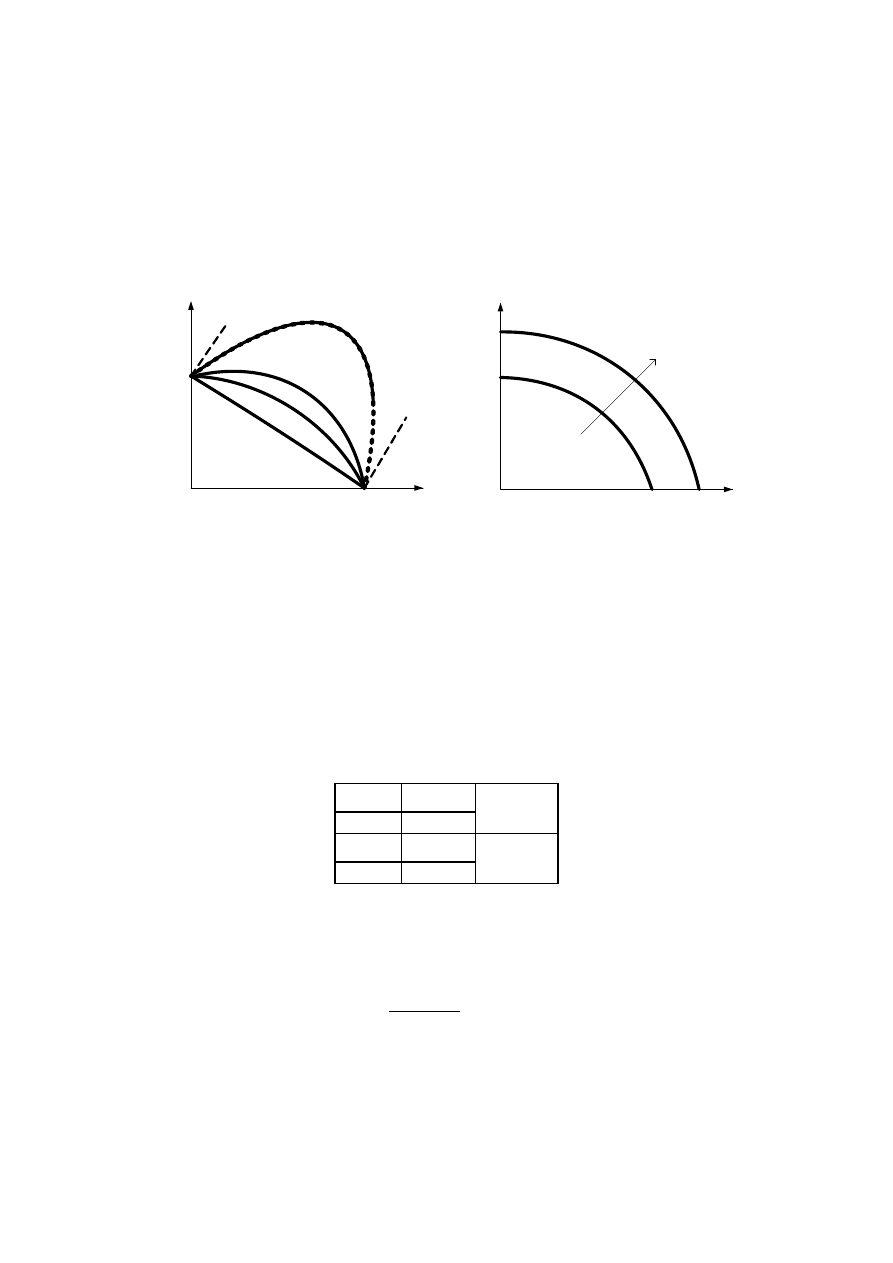
W zależności od sposobu wykonywania pomiarów otrzymuje się różne rodziny
charakterystyk zewnętrznych - rys.5. Indeks 0 dotyczy stanu jałowego, a indeks k oznacza
stan zwarcia prądnicy.
s
I
s
U
const
=
ϕ
cos
f
I
1
cos
=
ϕ
0
0
s
U
s
I
const
I
f
=
0
cos
=
L
ϕ
0
cos
=
C
ϕ
0
cos
=
C
ϕ
RC
R
RL
k
I
0
s
U
L
N
n
n
=
N
n
n
=
a) b)
Rys.5. Charakterystyki zewnętrzne: a) dla różnych współczynników mocy
przy stałym
prądzie wzbudzenia b) dla różnych wartości prądu wzbudzenia przy stałym współczynniku
mocy, tu dla obciążenia rezystancyjnego
W ćwiczeniu należy wykonać pomiary do wyznaczenia charakterystyki zewnętrznej
)
(
s
s
I
f
U
=
, przy obciążeniu prądnicy rezystancjami (
1
=
ϕ
cos
), dla dwóch wartości prądu
wzbudzenia:
f
I =5A i
f
I =7A, utrzymując stałe obroty wirnika
n
=const. W tym celu należy
wzbudzić nieobciążoną prądnicę prądem wzbudzenia o zalecanej wartości i załączając kolejne
sekcje obciążenia rezystancyjnego (grzałki) zapisywać wartości napięcia stojana w funkcji
prądu stojana. Wyniki zapisujemy w tabeli, jak niżej:
s
I [A]
s
U [V]
f
I = 5[A]
s
I [A]
s
U [V]
f
I = 7[A]
Poszczególne punkty pracy prądnicy w trakcie pomiarów ilustrują wykresy wskazowe podane
dla uproszczenia dla maszyny cylindrycznej - rys.6. Rzeczywiste zmiany napięcia są mniejsze
niż wyznaczone z przeprowadzonej na rysunku analizy graficznej, z racji wpływu
nieliniowości obwodu magnetycznego.
Wielkość określona wzorem:
%
100
0
%
sN
sN
s
U
U
U
U
−
=
δ
gdzie:
0
s
U
- napięcie przy
0
=
s
I
i
fN
f
I
I
=
nazywa się znamionową zmiennością napięcia. Informuje ona o wielkości zmiany
napięcia występującej przy odciążaniu prądnicy od obciążenia znamionowego do stanu
jałowego. Jej wartość wynosi około 40% i jest większa dla maszyn cylindrycznych.
5
S-
I
R
U
L
′
=
′
I
jX
d
′
k
d
f
I
jX
E
=
f
E
f
E
U
=
0
f
E
I
jX
d
′′
L
ϑ
′
L
ϑ
′′
2
/
π
ϑ
=
L
I
R
U
L
′′
=
′′
0
s
I
s
U
0
s
U
s
U
′
s
U
′′
s
I
′
s
I
′′
sk
I
1
f
I
Rys.6. Wykresy wskazowe ilustrujące wybrane punkty charakterystyki zewnętrznej prądnicy
cylindrycznej przy obciążeniu rezystancyjnym
5. Charakterystyki regulacji
Charakterystyki regulacji, określają jak należy regulować prąd wzbudzenia przy zmianach
obciążenia prądnicy
)
(
s
f
I
f
I
=
, aby utrzymać stałą wartość napięcia
s
U
stojana,
przy stałej
wartości współczynnika mocy -
ϕ
cos
=const i znamionowych obrotach wirnika
N
n
(stałej
częstotliwości napięcia stojana
N
f
).
W ćwiczeniu należy wykonać pomiary do wyznaczania
charakterystyki regulacji, przy obciążeniu prądnicy rezystancjami (
1
=
ϕ
cos
), dla dwóch
wartości napięcia międzyfazowego stojana:
s
U
=250V i
s
U
=300V, utrzymując stałe obroty
wirnika
n
=const. W tym celu należy wzbudzić nieobciążoną prądnicę do zadanej wartości
napięcia stojana i załączając kolejne sekcje obciążenia rezystancyjnego (grzałki) tak zmieniać
(zwiększać) prąd wzbudzenia, aby napięcie utrzymywało wartość początkową. Wartości
mierzonych prądów zapisujemy w tabeli, jak niżej:
f
I
[A]
s
I
[A]
s
U
= 250[V]
f
I
[A]
s
I
[A]
s
U
= 300[V]
s
I
′
s
I
′′
s
I
′′′
s
I
s
I
′′′
const
U
s
=
1
cos
=
ϕ
const
n
=
f
I
s
d
I
jX
′
f
E
′
s
I
′
s
I
′′
L
ϑ
′
L
ϑ
′′
L
ϑ
′′′
s
d
I
jX
′′
s
d
I
jX
′′′
f
E
′′
f
E
′′′
s
U
0
f
I
′
f
I
f
I
′′
f
I
′′′
f
f
I
k
E
=
s
U
Rys.7. Wykresy wskazowe ilustrujące wybrane punkty charakterystyki regulacji prądnicy
cylindrycznej przy obciążeniu rezystancyjnym
6
S-
6. Pomiar reaktancji synchronicznych
d
X
i
q
X
metodą małego poślizgu
Pomiar reaktancji
d
X
i
q
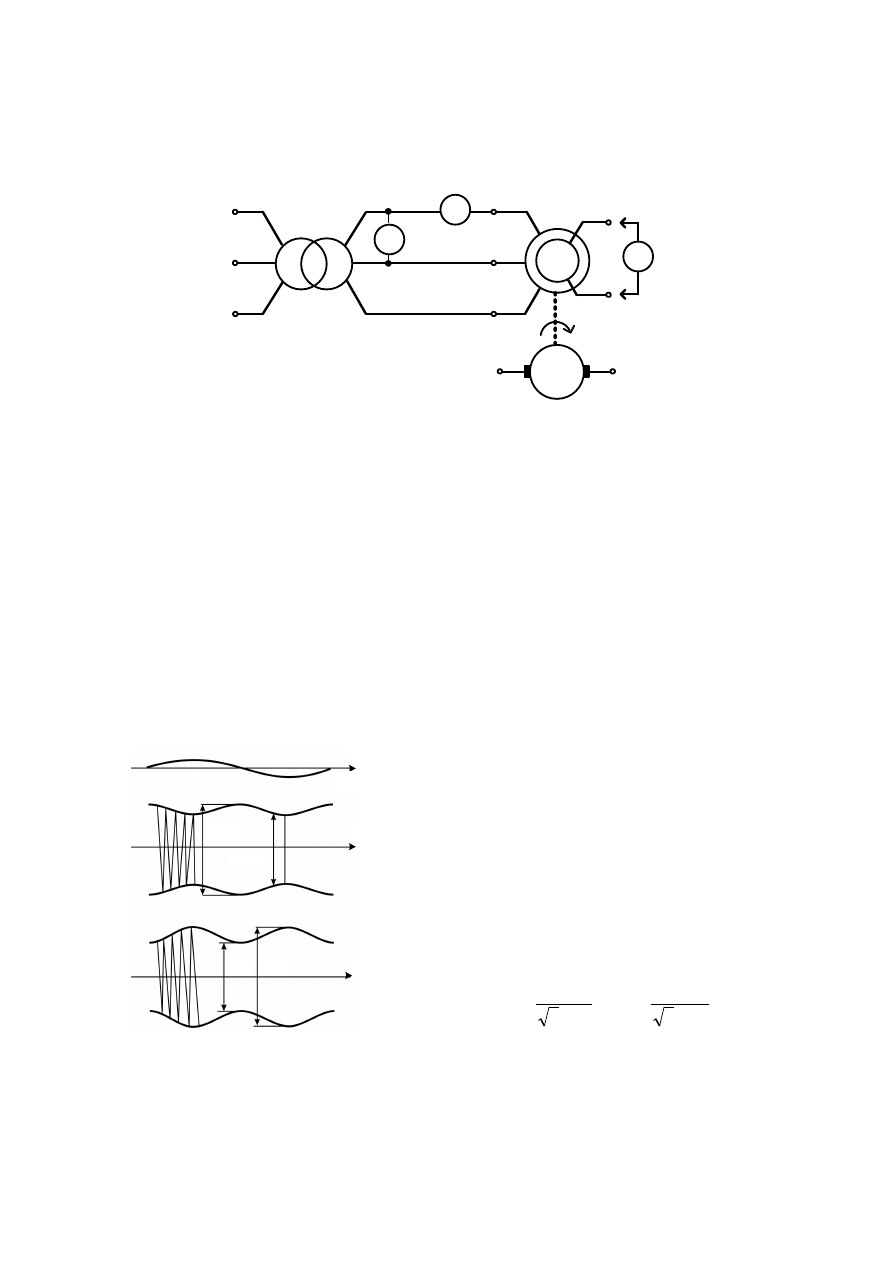
X
metodą małego poślizgu wykonuje się w układzie, którego
schemat przedstawiony jest na rys.8.
L1
L2
L3
V
1
V
2
A
GS
PS
s
I
s
U
f
U
s
n
s
n
)
1
(
−
=
TR
U
V
W
J
K
Rys.8. Schemat układu pomiarowego do pomiaru
d
X
,
q
X
Stojan maszyny jest zasilany symetrycznym napięciem trójfazowym obniżonym tak, aby
maszyna nie została wciągnięta w synchronizm przez moment reluktancyjny. Wirnik
napędzany z prędkością podsynchroniczną wiruje z niewielkim poślizgiem względem pola
wirującego twornika (stojana). Wtedy przy rozwartym uzwojeniu wzbudzenia sinusoidalny
prąd twornika o częstotliwości
s
f
jest modulowany przebiegiem sinusoidalnym o
częstotliwości
s
sf
2
, wywołanym niesymetrią obwodu magnetycznego. W chwili, gdy oś pola
wirującego pokrywa się z osią podłużną wirnika, wartość skuteczna tego prądu osiąga
minimum, a w chwili, gdy oś pola wirującego pokrywa się z osią poprzeczną - maksimum.
Zmiany wartości prądu powodują niewielkie zmiany napięcia zasilania stojana, spowodowane
spadkiem napięcia w transformatorze zasilającym. Przy minimalnej wartości skutecznej prądu
spadek napięcia na impedancji transformatora jest mniejszy niż dla maksymalnej wartości
skutecznej prądu, stąd napięcie na stojanie osiąga maksymalną wartość skuteczną i odwrotnie
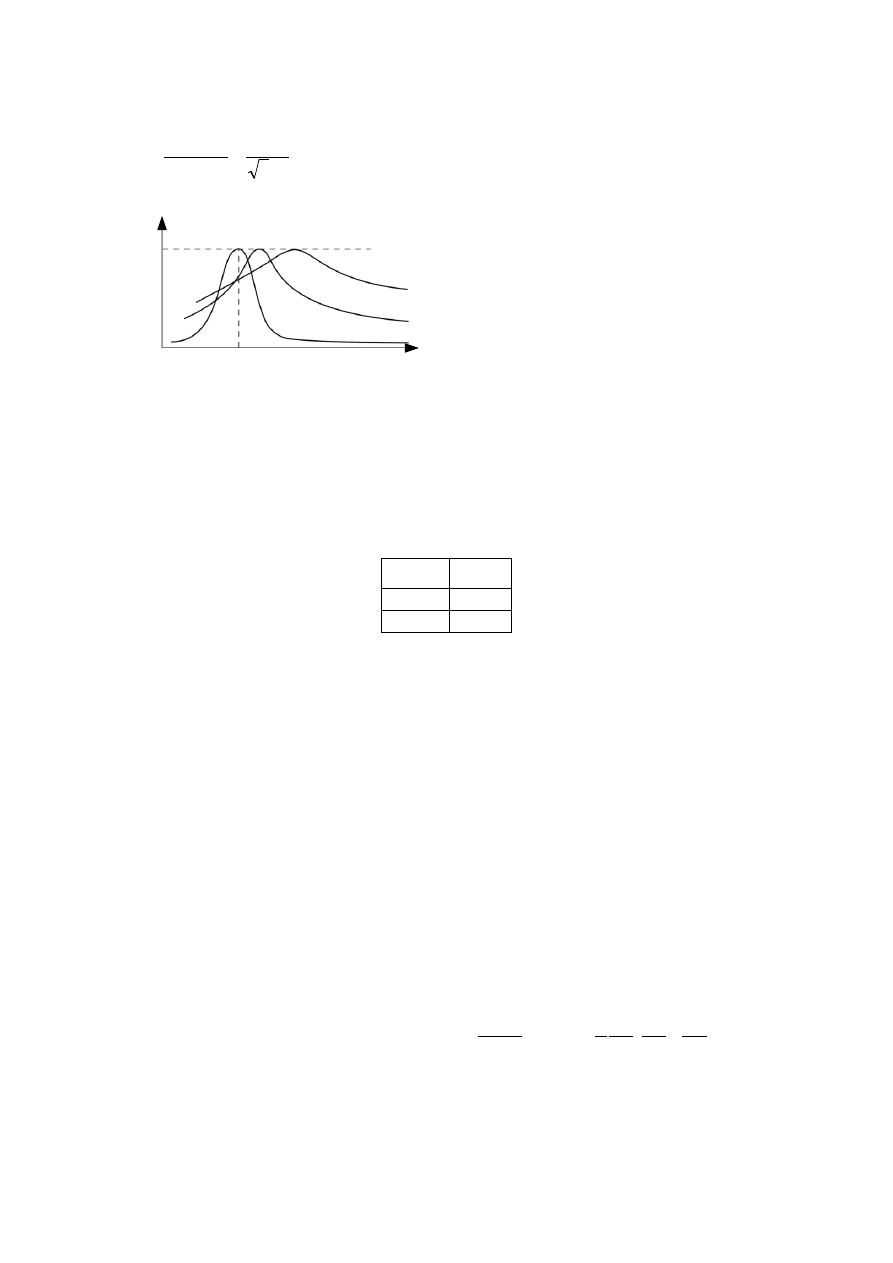
– co przedstawiono na rys.9.
t
t
t
U
f
t
t
max
s
U
min
s
U
max
s
I
min
s
I
t
f
U
Rys.9. Przebieg prądu i napięcia przy pomiarze
d
X
,
q
X
metodą małego poślizgu,
f
U
- napięcie
indukowane w uzwojeniu wzbudzenia
Znajomość
maksymalnych
i
minimalnych
wartości skutecznych prądu i napięcia uzwojenia
stojana, które połączone jest w gwiazdę, pozwala
obliczyć
szukane
reaktancje
na podstawie
następujących
zależności,
wynikających
z
wykresów wskazowych maszyny:
min
max
s
s
d
I
U
X
3
=
,
max
min
s
s
q
I
U
X
3
=
.
gdzie:
max
s
U
- wartość skuteczna napięcia międzyfazowego stojana, odpowiadająca
minimalnej wartości prądu stojana
min
s
I
,
min
s
U
– wartość skuteczna napięcia
międzyfazowego stojana, odpowiadająca maksymalnej odczytanej wartości prądu stojana
7
S-
max
s
I
. Poprawne wyznaczenie wartości
min
s
I
,
max
s
I
jest z reguły utrudnione z powodu dwóch
różnych wartości następujących po sobie maksimów i minimów prądu.
Pierwszym czynnikiem wywołującym te różnice są prądy indukowane w klatce tłumiącej
i litych elementach wirnika. Są one przyczyną modulacji prądu twornika przebiegiem o
częstotliwości
s
sf
2
, zanikającym przy poślizgu dążącym do zera. Jego wpływ eliminuje się
poprzez przeprowadzenie pomiarów przy możliwie najmniejszym poślizgu -
01
,
0
≤
s
.
Drugim czynnikiem jest wpływ napięcia remanentu (szczątkowego)
sz
U
, mierzonego na
biegu jałowym prądnicy, przy zerowym prądzie wzbudzenia. Jeśli
s
sz
U
U
3
,
0
>
konieczne jest
rozmagnesowanie wirnika prądem o niskiej częstotliwości. W przypadkach, gdy
s
sz
U
U
3
,
0
<
przy wyznaczeniu reaktancji prądnicy należy przeprowadzić w następujący sposób:
ś
r
s
s
d
I
U
X
min
max
3
=
,
2
2
1
min
min
min
s
s
ś
r
s
I
I
I
+
=
;
max
min
s
s
q
I
U
X
3
=
,
2
2
2
max
1
max
max
3
2
−
+
=
d
sz
s
s
s
X
U
I
I
I
W przypadku, gdy otrzymana metodą małego poślizgu wartość
d
X znacznie różni się od
wartości tej reaktancji, wyznaczonej z charakterystyki biegu jałowego i zwarcia, należy ją
odrzucić jako błędną. Wtedy jako reaktancję
d
X przyjmujemy wartość obliczoną
z charakterystyki biegu jałowego i charakterystyki zwarcia, a reaktancję
q
X obliczamy
zgodnie z proporcją:
1
1
d
d
q
q
X
X
X
X
⋅
=
gdzie:
1
d
X
,
1
q
X - wartości reaktancji maszyny
obliczone pierwotnie na podstawie pomiarów metodą małego poślizgu,
d
X - wartość
reaktancji obliczona z charakterystyk biegu jałowego i zwarcia.
Podczas pomiarów wykonujemy kolejno czynności, w układzie jak na rys.9:
•
zasilamy stojan prądnicy synchronicznej poprzez trójfazowy transformator obniżonym
napięciem symetrycznym o częstotliwości znamionowej i wartości skutecznej rzędu
(10
÷
15%)
N
U , tak aby prąd stojana nie przekraczał wartości znamionowej;
•
rozpędzamy powoli wirnik, kontrolując wskazania woltomierza wpiętego w obwód
uzwojenia wzbudzenia. Wzrost napięcia indukowanego w uzwojeniu wzbudzenia ze
wzrostem prędkości obrotowej świadczy o przeciwnym kierunku wirowania wirnika
względem pola wirującego. Należy wtedy zmienić kierunek obrotów wirnika lub
zmienić kolejność faz twornika. Jeśli wskazania woltomierza maleją, kierunki
wirowania są zgodne. Po stwierdzeniu zgodności kierunków wirowania wypinamy
woltomierz z obwodu wzbudzenia;
•
doprowadzamy wirnik do prędkości podsynchronicznej (s
≤
0,01);
•
mierzmy
wartości
maksymalne
i
minimalne
napięcia
międzyfazowego
i prądów stojana:
max
s
U
,
min
s
U
,
1
max
s
I
,
1
min
s
I
,
2
max
s
I
i
2
min
s
I
;
•
odłączamy zasilanie stojana i mierzymy napięcie międzyfazowe stojana - wartość
napięcia remanentu
sz
U .
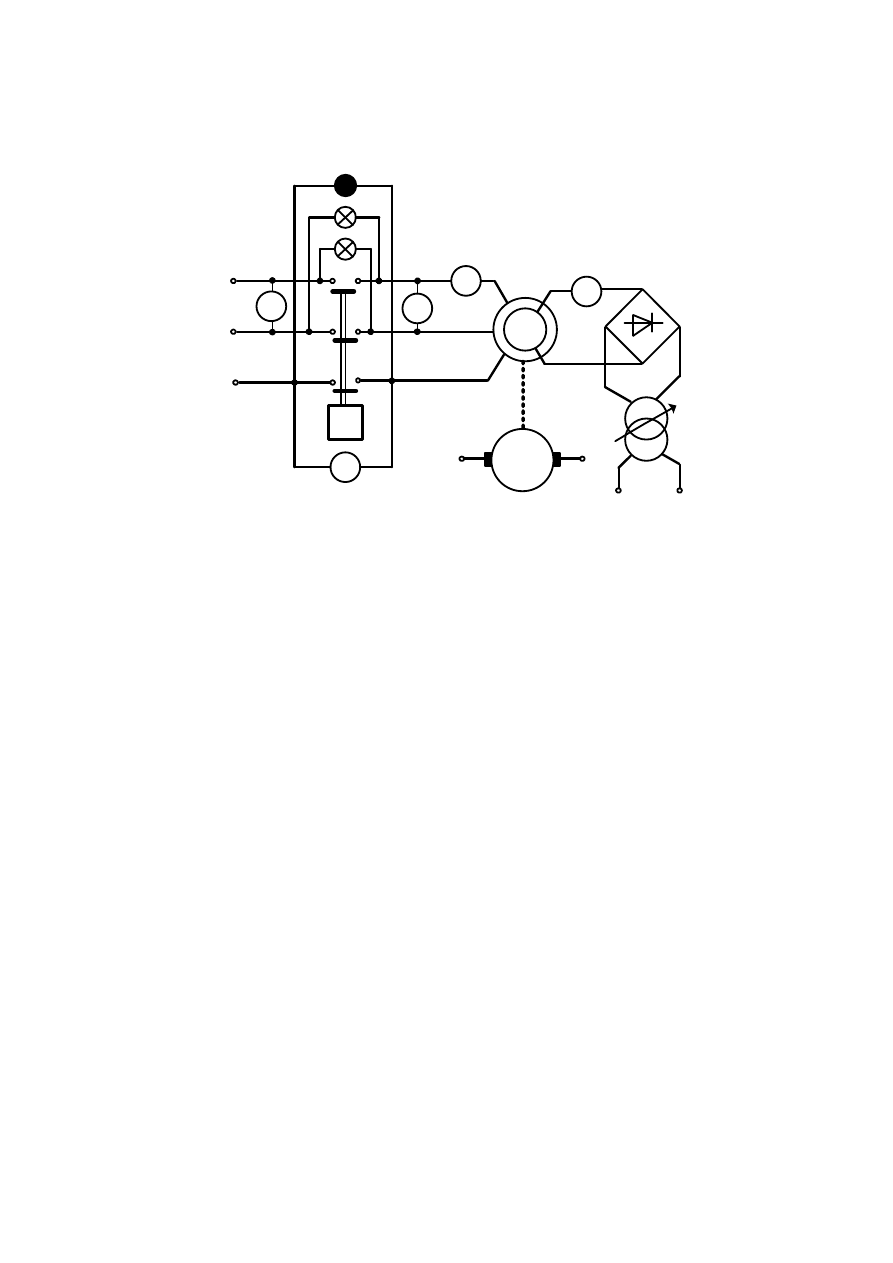
7. Synchronizacja prądnicy synchronicznej z siecią
Warunki synchronizacji dokładnej (według kolejności ważności przestrzegania), przy której
wektory napięć sieci i prądnicy pokrywają się i podczas łączenia nie popłyną w układzie sieć -
prądnica synchroniczna prądy wyrównawcze:
-
ta sama kolejność faz sieci i prądnicy,
8
S-
-
syn
sieci
f
f
=
- ta sama częstotliwość napięć sieci i prądnicy,
-
syn
sieci
U
U
=
- te same wartości skuteczne odpowiadających sobie napięć sieci i prądnicy.
L1
L2
L3
ST
V
2
V
1
A
V
3
GS
A
PS
s
I
f
I
Rys.10. Schemat układu do synchronizacji dokładnej
Kolejność czynności podczas pomiarów dla drugiej maszyny synchronicznej:
•
Połączyć układ zgodnie ze schematem – rys.10,
•
Wykonać rozruch silnika prądu stałego,
•
Zwiększyć wzbudzenie generatora synchronicznego, tak by napięcie na woltomierzu V1
osiągnęło wartość napięcia sieci.
•
Doregulować wzbudzenie (zatem obroty) silnika prądu stałego tak, by pulsujące światło
na żarówkach wirowało bardzo powoli (częstotliwość napięcia prądnicy ma taką samą
wartość co sieć zasilająca -
Hz
f
50
=
). Woltomierz V3 wskazuje różnicę napięć między
siecią zasilającą i prądnicą w tej samej fazie.
•
W chwili, gdy żarówka połączona w układzie „na ciemno” jest zgaszona, żarówki
połączone „na jasno” świecą najjaśniej, a woltomierz różnicowy wskazuje zero - gwiazdy
napięć od strony sieci i generatora pokrywają się. Wtedy poprzez włączenie stycznika ST
włączamy generator do sieci. Po synchronizacji odłączamy zasilanie silnika prądu stałego,
zatem maszyna synchroniczna przejdzie w stan pracy silnikowej, praktycznie na biegu
jałowym, obciążona jedynie wirnikiem silnika prądu stałego.
8. Wyznaczenie krzywych „V” dla obciążenia silnika synchronicznego mocą
0
≅
P
Krzywe „V”, zwane tak z racji swojego kształtu, są rodziną zależności prądu stojana
(twornika) od prądu wzbudzenia
)
(
f
s
I
f
I
=
dla stałej wartości mocy czynnej pobieranej albo
oddawanej do sieci zasilającej, przy stałym napięciu stojana
const
U
s
=
i stałej znamionowej
częstotliwości
N
f
f
=
. Badana maszyna jest sprzęgnięta zwykle z maszyną prądu stałego o
wzbudzeniu równoległym. Stałą wartość przesyłanej mocy czynnej reguluje się przez zmianę
prądu wzbudzenia lub napięcia twornika maszyny prądu stałego. Pomiary można wykonać
zarówno dla stanu pracy prądnicowej jak też silnikowej maszyny synchronicznej. Na rys.11
przedstawione są przebiegi krzywych „V” dla pracy silnikowej maszyny, dla wybranych
wartości mocy równych kolejno 0, 1/2
N
P ,
N
P . Należy dokładnie określić współrzędne
minimów poszczególnych krzywych oraz granice stabilnej pracy silnika. Regulacja prądu
f
I
9
S-
przy niedowzbudzeniu musi być precyzyjna, by silnik nie utracił stabilności. Ewentualne
wypadnięcie z synchronizmu i przejście do pracy asynchronicznej jest sygnalizowane nagłym
wzrostem prądu stojana. Należy wtedy szybko zwiększyć prąd wzbudzenia lub odciążyć
silnik.
1
cos
=
ϕ
A
B
s
I
f
I
0
=
P
N
P
P
5
,
0
=
N
P
P
=
fN
I
0
f
I
G
ra
ni
ca
st
ab
iln
oś
ci
sN
I
q
q
d
f
f
X
X
X
I
I
−
−
=
0
d
sA
X
U
I
=
q
sB
X
U
I
=
0
ind
poj
Rys.11. Krzywe „V” dla silnika wydatnobiegunowego
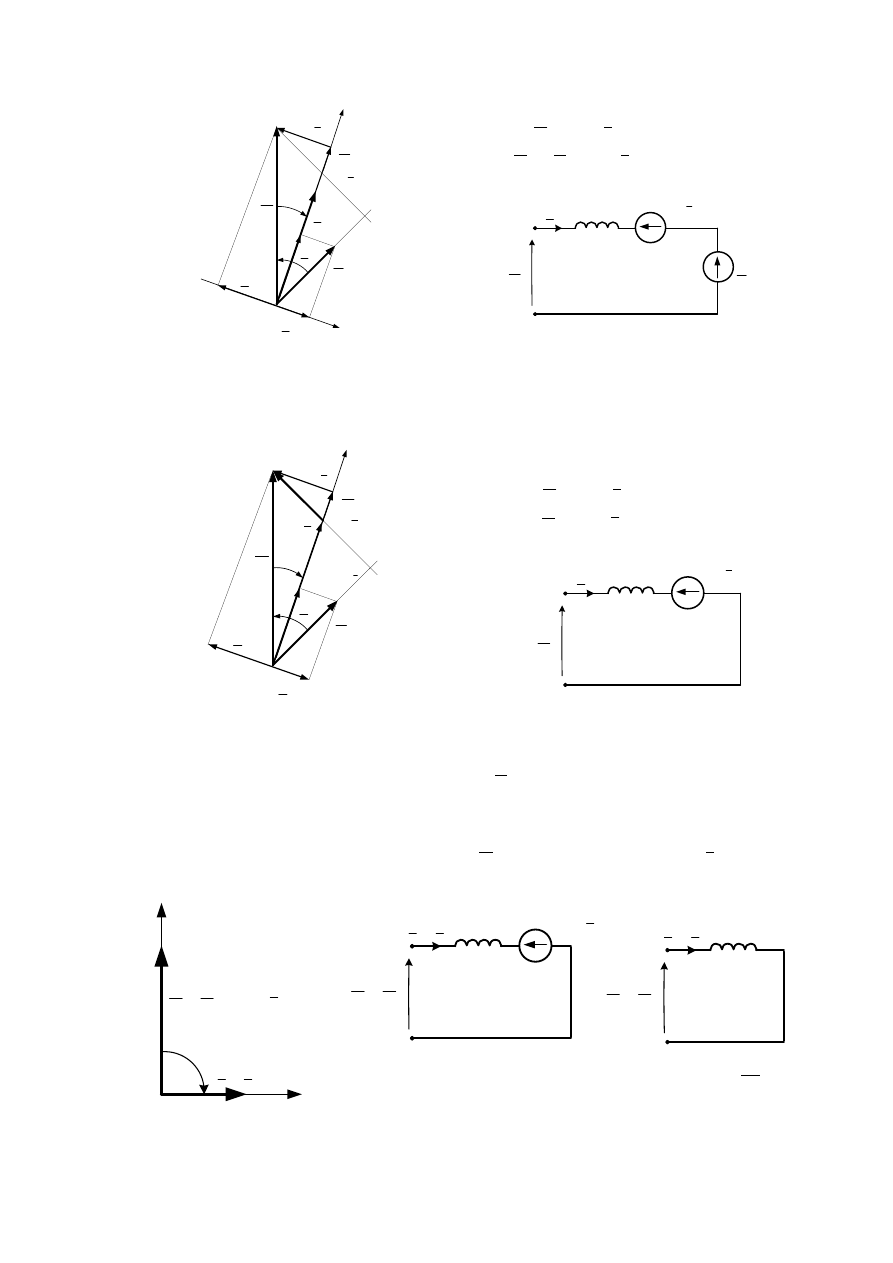
Przebieg krzywej „V” można wyjaśnić na podstawie zmiany wykresu wskazowego prądów i
napięć, przedstawione na rys.12, dla uproszczenia dla silnika cylindrycznego. W dalszych
analizach oznaczamy wartości fazowe napięcia i prądu stojana jako U i .
I
ϕ
ϕ′
ϕ
′′
I
U
f
E
f
E
′
f
E
′′
I
′
I
′′
I
jX
d
I
jX
d
′
I
jX
d
′′
const
P
=
ϑ
0
max
90
−
=
ϑ
Rys.12. Wykresy wskazowe silnika
cylindrycznego silnika przy
const
P
=
,
f
I = var
Przy stałej mocy obciążenia
const
P
=
zmianom
prądu wzbudzenia
f
I odpowiada przesunięcie końca
wskazu
f
E (proporcjonalnego do
f
I ) po linii
równoległej do wskazu napięcia fazowego
U
.
Jednocześnie zmienia się odpowiednio amplituda i
faza prądu stojana
I
, przy czym jego wartość jest
najmniejsza przy współczynniku mocy
1
cos
=
ϕ
.
Lewa gałąź krzywej „V” dotyczy stanów, w których
silnik pobiera moc bierną indukcyjną (silnik
niedowzbudzony), prawa gałąź odnosi się do stanów
przewzbudzonych, w których silnik pobiera bierną
pojemnościową. Wraz ze zmniejszaniem prądu
wzbudzenia kąt między
U
a
f
E , czyli kąt mocy
ϑ
rośnie tak, aby była zachowana stałość mocy czynnej
P
. Po osiągnięciu przez
ϑ
wartości
0
90 przy
dalszym zmniejszaniu
f
I
zacznie maleć moc czynna
silnika, co wobec stałej mocy obciążenia spowoduje
wypadnięcie maszyny z synchronizmu. Stan ten
określa granicę stabilnej pracy silnika, która
ogranicza krzywe „V” od lewej strony. Z prawej
strony i od góry ograniczają je natomiast znamionowe
wartości prądu stojana i wzbudzenia – rys.11.
10
S-
Ze zmierzonych wartości
s
s
I
U
P
,
,
oblicza się zwykle współczynnik mocy, ze wzoru
UI
P
I
U
P
sph
sph
3
3
cos
=
=
ϕ
i przedstawia w funkcji prądu wzbudzenia, w postaci
charakterystyk:
)
(
cos
f
I
f
=
ϕ
- rys.13.
ϕ
cos
1
0
f
I
0
=
P
0
f
I
N
P
P
=
N
P
P
5
,
0
=
Rys.13. Zmiana współczynnika mocy od
prądu wzbudzenia przy stałej mocy
czynnej silnika synchronicznego
W ćwiczeniu po wykonaniu synchronizacji prądnicy z siecią i wprowadzeniu maszyny w stan
pracy silnikowej wykonujemy pomiar krzywej „V” dla mocy obciążenia bliskiej zeru (moc
można oszacować przez odczyt wskazania watomierza, włączonego w wybraną fazę stojana).
Zmniejszając prąd wzbudzenia silnika synchronicznego
f
I
od wartości, dla której odczytany
prąd stojana
s
I
wyniesie ok. 18A, aż do zera zapisujemy wskazania amperomierzy, określając
dokładnie wartość prądu
f
I
odpowiadającą minimum prądu
s
I
.
Wyniki pomiarów zapisujemy w tabeli:
f
I
[A]
s
I
[A]
9. Wyznaczenie reaktancji synchronicznych
d
X
i
q
X
z krzywej „V”
Rzeczywista krzywa „V” dla zerowej mocy obciążenia (
0
=
P
, na rys.11) różni się od
krzywej dla zerowej mocy elektrycznej o wartość strat mechanicznych
m
P
∆
. Pominięcie tych
strat pozwala wyznaczyć z pomiarów dla pracy silnikowej maszyny przybliżone wartości
reaktancji
d
X
i
q
X
, co umożliwi m.in. obliczenie przeciążalności silnika. Wartość reaktancji
d
X
oblicza się z pomiaru prądu i napięcia stojana w stanie jałowym przy wzbudzeniu
0
=
f
I
(punkt A - rys.11). Dla wyznaczenia
q
X
należy zmienić biegunowość napięcia zasilającego
uzwojenie wzbudzenia i odpowiednio zwiększyć prąd wzbudzenia od zera aż do wartości
odpowiadającej punktowi B na charakterystyce prądów (rys.11). Kontrolując za pomocą
stroboskopu wartość kąta mocy
ϑ
, odczytujemy prąd stojana (tu ok.27A) dla niestabilnego
położenia
wirnika względem osi pola wirującego wytworzonego przez uzwojenie stojana, tuż
przed przeskokiem wirnika o 180
0
elektrycznych (dla badanej maszyny
3
=
p
, stąd wirnik
zmieni położenie o 60
0
mechanicznych). Po przeskoku, w punkcie B krzywej „V”, wirnik
ustawi się w położeniu stabilnym z kątem mocy
0
0
=
ϑ
, a prąd stojana znacząco spadnie.
Wyjaśnienie metody pomiaru, pomijające wpływ strat mechanicznych:
Silnik wydatnobiegunowy wytwarza moment:
)
2
sin(
)
1
1
(
2
3
)
sin(
3
0
2
ϑ
ω
ϑ
−
−
+
−
Ω
=
d
q
d
s
f
e
X
X
U
X
UE
T
Znak „-„ wynika z przyjętego zwrotu kąta wewnętrznego
ϑ
- ujemnego dla silnika.
Dla obu punktów pracy, dla zerowej wartości mocy czynnej mamy
0
=
e
T
.
W obu przypadkach, dla punktu pracy A lub B silnik pracuje w warunkach niedowzbudzenia,
czemu odpowiada poglądowy wykres wskazowy napięć i prądów.
11
S-
q
ϕ
ϑ
U
I
d
I
d
U
q
U
d
f
E
q
q
I
jX
q
I
d
d
I
jX
Rys. 14. Wykres wskazowy niedowzbudzonego
wydatnobiegunowego silnika synchronicznego
q
q
d
I
jX
U
=
,
ϑ
sin
U
U
d
=
d
d
f
q
I
jX
E
U
+
=
,
ϑ
cos
U
U
q
=
U
q
jX
I
d
q
d
I
X
X
j
)
(
−
f
E
Rys. 15. Ogólny schemat zastępczy
wydatnobiegunowego silnika
synchronicznego
W przypadku pracy z brakiem wzbudzenia silnik wytwarza jedynie moment reluktancyjny,
a wykres wskazowy i schemat zastępczy mają odpowiednio postać jak na rys.16 i rys.17.
q
ϕ
ϑ
U
I
d
I
d
U
q
U
d
q
q
I
jX
q
I
d
q
d
I
X
X
j
)
(
−
I
jX
q
d
q
I
jX
Rys. 16. Wykres wskazowy wydatnobiegunowego
silnika synchronicznego przy
0
=
f
I
q
q
d
I
jX
U
=
,
ϑ
sin
U
U
d
=
d
d
q
I
jX
U
=
,
ϑ
cos
U
U
q
=
U
q
jX
I
d
q
d
I
X
X
j
)
(
−
Rys. 17. Schemat zastępczy silnika
synchronicznego reluktancyjnego
-
W punkcie A prąd wzbudzenia
0
=
f
I
(zatem
0
=
f
E
), stąd aby moment
e
T był równy
zeru musi zachodzić:
0
)
2
sin(
=
−
ϑ
, co wyznacza wartość kąta wewnętrznego za równą
0
0
=
ϑ
lub
0
90
−
=
ϑ
(tą wartość odpowiadającą dla momentu reluktancyjnego pracy
niestabilnej odrzucamy). Wtedy składowa napięcia
0
=
d
U
i dalej składowa prądu
0
=
q
I
.
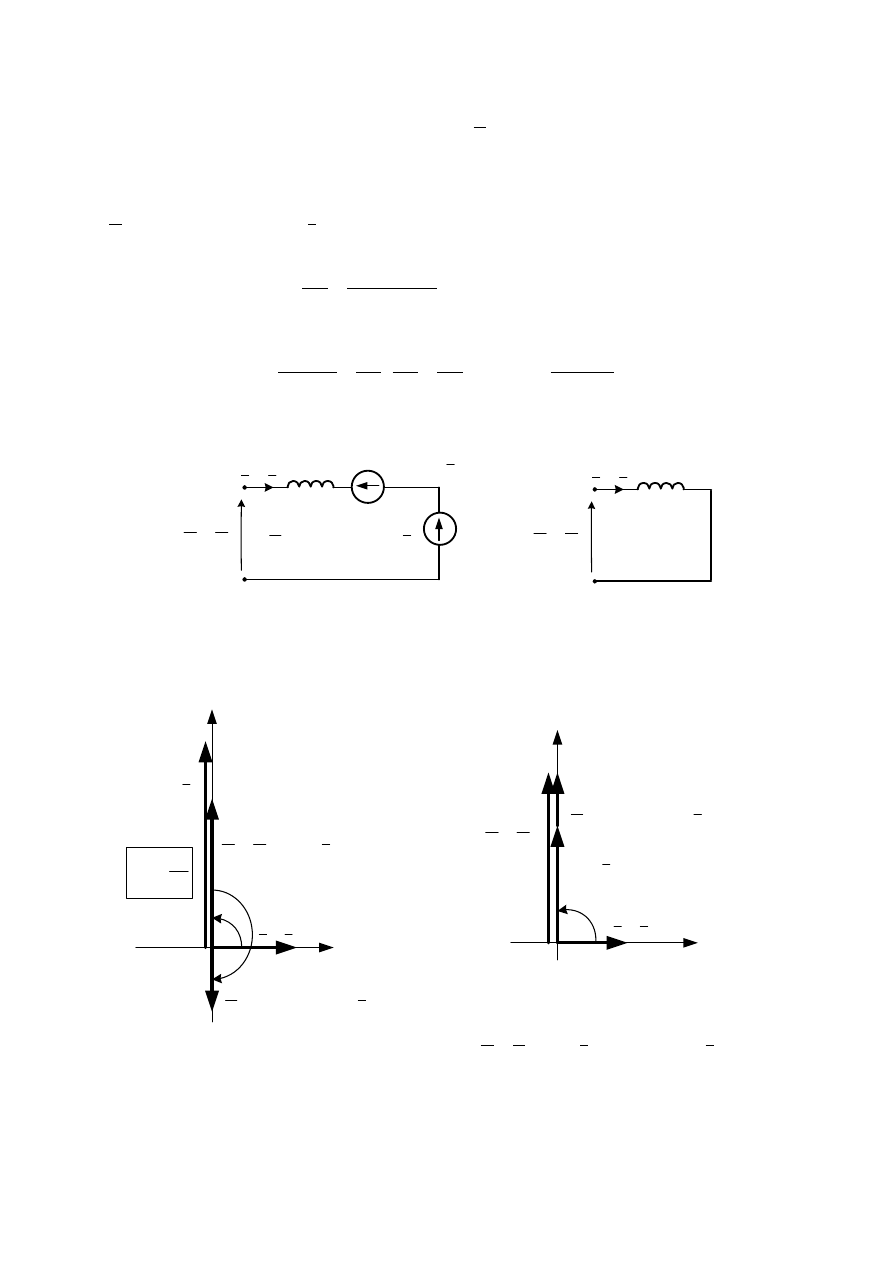
Stanowi pracy silnika w punkcie A odpowiadają (zmodyfikowane na podstawie rys.16 i
rys.17) wykres wskazowy i schemat zastępczy przedstawione na rys.18.
ϕ
q
d
d
d
q
I
jX
U
U
=
=
d
I
I
=
0
=
ϑ
q
U
U
=
q
jX
d
I
I
=
d
q
d
I
X
X
j
)
(
−
d
jX
⇒
q
U
U
=
d
I
I
=
Wyznaczona w punkcie A wartość reaktancji:
A
d
I
U
X
=
.
Rys. 18. Wykres wskazowy i schemat zastępczy nieobciążonego wydatnobiegunowego
silnika synchronicznego dla punktu A krzywej „V” z rys.11
12
S-
-
W punkcie B ponieważ
0
≠
f
I
( zatem
0
≠
f
E
), aby moment
e
T był równy zeru
wartość kąta wewnętrznego musi wynosić
0
0
=
ϑ
lub
0
180
−
=
ϑ
(dla tej wartości kąta silnik
znajduje się w niestabilnym stanie pracy, stąd można zaobserwować na stroboskopie przeskok
wirnika do położenia stabilnego
0
0
=
ϑ
). Podobnie jak w punkcie A składowa napięcia
0
=
d
U
i składowa prądu
0
=
q
I
. Wartość prądu wzbudzenia dobieramy tak aby pod jego
wpływem wartość generowanej siły elektromotorycznej wyniosła:
d
q
d
q
d
q
q
d
f
f
f
I
X
X
I
X
X
X
X
X
U
I
I
U
E
)
(
)
(
)
(
0
−
=
−
=
−
=
=
Wymaganą wartość
f
I określamy z rys.11, z analizy trójkątów podobnych:
q
q
d
f
f
q
d
d
q
f
f
f
X
X
X
I
I
X
X
X
U
X
U
I
I
I
−
=
⇒
=
=
+
0
0
0
:
Wtedy ta szczególna wartość prądu wzbudzenia przy przeciwnym zasilaniu obwodu
wzbudzenia pozwolą przekształcić schemat zastępczy silnika z rys.15 w następujący sposób:
q
U
U
=
q
jX
d
I
I
=
d
q
d
I
X
X
j
)
(
−
d
q
d
f
I
X
X
j
E
)
(
−
−
=
q
U
U
=
q
jX
d
I
I
=
⇒
Rys. 19. Schemat zastępczy nieobciążonego wydatnobiegunowego silnika synchronicznego
dla punktu B krzywej „V” z rys.11
Stanowi pracy silnika w punkcie B odpowiada (zmodyfikowany na podstawie rys.16) wykres
wskazowy przedstawiony na rys.20.
ϕ
q
d
d
q
q
I
jX
U
U
=
=
d
I
I
=
0
180
−
=
ϑ
d
d
I
jX
d
q
d
f
I
X
X
j
E
)
(
−
−
=
B
q
I
U
X
=
Tuż przed przeskokiem wirnika prąd
stojana jest największy
ϕ
q
d
q
U
U
=
d
I
I
=
0
=
ϑ
d
d
I
jX
d
q
d
f
I
X
X
j
E
)
(
−
=
Tuż po przeskoku wirnika o
0
180 , do położenia
stabilnego, prąd stojana skokowo maleje
I
X
X
j
I
jX
E
U
q
d
d
d
f
)
2
(
−
=
+
=
Rys. 20. Wykres wskazowy nieobciążonego wydatnobiegunowego silnika synchronicznego
dla punktu B krzywej „V” z rys.11
13
S-
Opracowanie sprawozdania
W sprawozdaniu należy:
•
Zamieścić dane znamionowe badanych maszyn, schematy układów pomiarowych, tabele
wyników, wykresy, obliczenia parametrów, schematy zastępcze, wykresy wskazowe,
przeprowadzić porównanie obliczeń i pomiarów, przedstawić wnioski.
•
Narysować w jednym układzie współrzędnych wyznaczone charakterystyki biegu
jałowego i zwarcia:
)
(
0
f
s
I
f
U
=
,
)
(
f
sk
I
f
I
=
.
•
Obecność
napięcia
szczątkowego
należy wyeliminować przesuwając obie
charakterystyki w prawo tak, aby rozpoczynały się w początku układu
współrzędnych. Zaznaczyć linię, według której narastałoby napięcie, gdyby nie
występowało zjawisko nasycenia obwodu magnetycznego.
•
Obliczyć wartość reaktancji synchronicznej nasyconej
dn
X
oraz nienasyconej
d
X :
sk
s
dn
I
U
X
3
0
=
,
sk
s
d
I
U
X
3
0
′
=
gdzie:
0
s
U ,
sk
I są wartościami międzyfazowego
jałowego napięcia stojana i prądu zwarcia odczytanymi przy tym samym prądzie
wzbudzenia (przyjmujemy w tym przypadku wartość
0
f
I
).
0
s
U
′
- wartość napięcia
stojana, przy pominięciu zjawiska nasycenia obwodu magnetycznego.
•
Narysować w jednym układzie współrzędnych charakterystyki zewnętrzne
i charakterystyki regulacji:
)
(
s
s
I
f
U
=
,
)
(
s
f
I
f
I
=
.
•
Obliczyć zmienność napięcia:
(
)
(
)
(
)
%
:
dla
:
dla
:
dla
100
0
⋅
=
=
−
=
=
sN
s
s
sN
s
s
s
s
I
I
U
I
I
U
I
U
δ
•
Określić znamionowy prąd wzbudzenia prądnicy, przy
1
=
ϕ
cos
.
•
Wyznaczyć wartości reaktancji
d
X i
q
X z pomiarów metodą małego poślizgu.
•
Narysować schematy zastępcze dla prądnicy z obciążeniem rezystancyjnym, przy
pominięciu rezystancji uzwojeń stojana. Na ich podstawie obliczyć teoretyczny
przebieg charakterystyki zewnętrznej, przyjmując za znane napięcia stojana i
wyznaczone parametry maszyny, a za szukane wartości prądu stojana. Narysować
wykres wskazowy maszyny dla wybranego punktu na tej charakterystyce.
Wyznaczoną charakterystykę porównać na jednym wykresie z charakterystyką
zmierzoną.
•
Uzasadnić sposób synchronizacji drugiej maszyny, narysować zmierzoną krzywą „V”.
•
Wyznaczyć reaktancje
d
X i
q
X z krzywej „V”.
Literatura podstawowa:
1. J.K. Markielowski i in.: Laboratorium maszyn elektrycznych, PK, Kraków 1982
2. J. Skwarczyński i in.: Laboratoryjne pomiary maszyn elektrycznych, AGH, Kraków 1985.
Opracował: dr inż. Konrad Weinreb
Kraków, grudzień 2010
Wyszukiwarka
Podobne podstrony:
Laboratorium z Maszyn Elektrycz Nieznany
Badanie prądnicy synchronicznej v3, LABORATORIUM MASZYN ELEKTRYCZNYCH
Synchroniczna z siecią, LABORATORIUM MASZYN ELEKTRYCZNYCH
ćw 6 - silnik synchroniczny, Przwatne, Studia, semestr 5, Laboratoria, Maszyny skrypt, sprawka
Badanie maszyny synchronicznej e, Szkoła, Politechnika 1- 5 sem, SEM IV, Maszyny Elektryczne. Labora
Badanie maszyny synchronicznej b, Szkoła, Politechnika 1- 5 sem, SEM IV, Maszyny Elektryczne. Labora
5 2 3a CCNA1 Laboratorium pl id Nieznany (2)
Montaz i naprawa maszyn i urzad Nieznany
Laboratorium metod numerycznych Nieznany
LABORATORIUM 1 id 261484 Nieznany
Laboratorium nr 5 wskaYniki Nieznany
instrukcja laboratoryjna id 216 Nieznany
Budowa frezarki, studia polsl MTA I, maszynoznastwo, maszynoznawstwo ogólne, maszynoznawstwo ogólne
Badanie maszyny synchronicznej
Laboratorium nr 8 dziedziczenie Nieznany
maszynoznawstwo uporzadkowane i Nieznany
więcej podobnych podstron