Agata Kłys Rzeszów, 22.11.2005
Piotr Czuryło
Bartłomiej Haraszczuk
L-02 III ED
Laboratorium Maszyn Elektrycznych.
Temat: Silnik synchroniczny.
1. Cel ćwiczenia.
Celem ćwiczenia jest poznanie budowy, zasady działania oraz własności ruchowych silnika synchronicznego.
2. Dane znamionowe:
Typ:-
SN = 10 kVA
UN = 400 V (Y)
n = 1500 obr/min
IN1 = 14,4 A cosφ = 0,80
IN2 = 11,6 A cosφ = 1
p=2
Wzbudzenie:
Uf = 80 V
If = 9,4 A
fN = 50 Hz
Rw = 2,63
3. Układ pomiarowy.
4. Rozruch silnika.
Załączamy trójfazowe uzwojenie do sieci co powoduje powstanie pola wirującego. Dzięki klatce rozruchowej, powstaje moment (jak w silniku klatkowym) i silnik rusza, osiągając prędkość podsynchroniczną. W tym czasie uzwojenie wzbudzenia nie jest zasilane. Silnik rusza a następnie pracuje z bardzo małym poślizgiem, zasilamy obwód wzbudzenia które wytwarza pole stałe, silnik wchodzi w ”synchronizm”.
Podczas rozruchu asynchronicznego, uzwojenie wzbudzenia nie może być rozwarte, gdyż wyidukowałoby się w nim znaczne napięcie, zwłaszcza w chwili załączenia, gdy prędkość pola względem wirnika jest bardzo duża. Mogłoby to spowodować uszkodzenie izolacji i zagrożenie dla obsługi. Dlatego na okres rozruchu należy obwód wzbudzenia zewrzeć przez odpowiednią rezystancję.
5. Pomiar charakterystyk kątowych: P=f(ϑ), If = const.
5.1 Tabele pomiarowe.
Iw1=6[A] |
||||||||
P1[W] |
P2[W] |
P3[W] |
P[W] |
Ia[A] |
Ib[A] |
Ic[A] |
ϑmech |
ϑel = ϑmech*p |
280 |
160 |
320 |
760 |
7 |
6,3 |
6,4 |
0 |
0 |
760 |
640 |
820 |
2220 |
8,4 |
7,5 |
7,8 |
3 |
6 |
880 |
840 |
1000 |
2720 |
8,6 |
7,8 |
8,2 |
5 |
10 |
1120 |
1000 |
1160 |
3280 |
9 |
8,3 |
8,6 |
6 |
12 |
1320 |
1160 |
1340 |
3820 |
9,6 |
8,8 |
9 |
7 |
14 |
1520 |
1340 |
1540 |
4400 |
10 |
9,2 |
9,6 |
8 |
16 |
1800 |
1640 |
1860 |
5300 |
11 |
10,3 |
10,4 |
10 |
20 |
Iw2=5[A] |
||||||||
P1[W] |
P2[W] |
P3[W] |
P[W] |
Ia[A] |
Ib[A] |
Ic[A] |
ϑmech |
ϑel = ϑmech*p |
240 |
120 |
280 |
640 |
5 |
4,3 |
4,3 |
0 |
0 |
480 |
400 |
520 |
1400 |
5,4 |
4,6 |
4,8 |
1 |
2 |
800 |
700 |
840 |
2340 |
6,1 |
5,2 |
5,6 |
3 |
6 |
1000 |
900 |
1060 |
2960 |
6,6 |
5,7 |
6,2 |
4 |
8 |
1200 |
1120 |
1300 |
3620 |
7,2 |
6,4 |
7,1 |
6 |
12 |
1440 |
1360 |
1520 |
4320 |
8 |
7,3 |
7,8 |
7 |
14 |
1720 |
1620 |
1780 |
5120 |
9 |
8,2 |
8,8 |
10 |
20 |
1840 |
1760 |
1920 |
5520 |
9,6 |
8,8 |
9,4 |
11 |
22 |
2040 |
1920 |
2060 |
6020 |
10,1 |
9,6 |
10,2 |
12 |
24 |
Iw3=4[A] |
||||||||
P1[W] |
P2[W] |
P3[W] |
P[W] |
Ia[A] |
Ib[A] |
Ic[A] |
ϑmech |
ϑel= ϑmech*p |
200 |
120 |
260 |
580 |
2,6 |
2 |
2,1 |
0 |
0 |
680 |
540 |
700 |
1920 |
3,9 |
3,1 |
3,6 |
4 |
8 |
800 |
720 |
860 |
2380 |
4,3 |
3,7 |
4,3 |
5 |
10 |
1080 |
1000 |
1140 |
3220 |
5,6 |
5 |
5,6 |
6 |
12 |
1440 |
1360 |
1480 |
4280 |
7,7 |
7,5 |
8 |
10 |
20 |
1480 |
1440 |
1560 |
4480 |
8,8 |
8,7 |
9 |
15 |
30 |
1560 |
1540 |
1660 |
4760 |
9,8 |
9,7 |
9,8 |
17 |
34 |
5.2 Charakterystyki.
6. Wyznaczanie strat i sprawności.
6.1 Wyznaczanie strat mechanicznych i w rdzeniu. P = f (U2)
6.1.1 Tabele pomiarowe.
U[V] |
P1[W] |
P2[W] |
P3[W] |
P[W] |
Ia[A] |
Ib[A] |
Ic[A] |
If[A] |
U2[V*V] |
448 |
200 |
40 |
240 |
480 |
1 |
0,6 |
1,2 |
4,3 |
200704 |
409 |
160 |
80 |
240 |
480 |
1 |
0,5 |
1 |
4,2 |
167281 |
375 |
160 |
100 |
200 |
460 |
1 |
1,3 |
1,2 |
3 |
140625 |
330 |
120 |
100 |
160 |
380 |
0,8 |
0,6 |
0,9 |
2,6 |
108900 |
287 |
120 |
100 |
160 |
380 |
1 |
1,2 |
1,5 |
1,9 |
82369 |
240 |
100 |
100 |
130 |
330 |
0,8 |
0,8 |
1,1 |
1,6 |
57600 |
185 |
80 |
100 |
120 |
300 |
1 |
0,8 |
1,2 |
1,3 |
34225 |
122 |
80 |
100 |
100 |
280 |
1,4 |
1,4 |
1,6 |
1,3 |
14884 |
6.1.2 Charakterystyki.
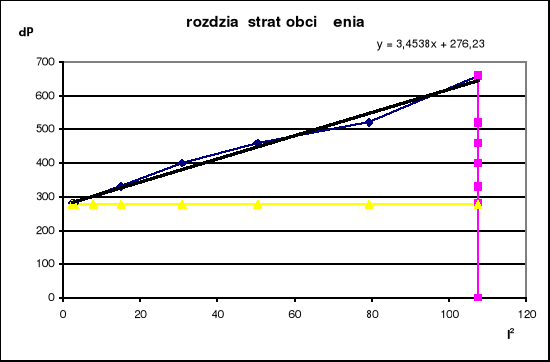
6.2 Wyznaczanie strat obciążeniowych P = f (I2) U = 118 V.
6.2.1 Tabele pomiarowe.
P1[W] |
P2[W] |
P3[W] |
P[W] |
Ia[A] |
Ib[A] |
Ic[A] |
I[A] |
I2[A*A] |
80 |
100 |
100 |
280 |
1,9 |
2 |
2,1 |
2 |
4 |
80 |
100 |
100 |
280 |
1,6 |
1,5 |
1,7 |
1,6 |
2,56 |
100 |
110 |
120 |
330 |
4 |
3,8 |
3,9 |
3,9 |
15,2 |
120 |
120 |
160 |
400 |
5,7 |
5,5 |
5,7 |
5,63 |
31,7 |
140 |
160 |
160 |
460 |
7,3 |
7 |
7,3 |
7,2 |
51,8 |
160 |
180 |
180 |
520 |
9,1 |
8,8 |
9 |
8,96 |
79,2 |
200 |
220 |
240 |
660 |
10,3 |
10,4 |
10,4 |
10,36 |
106 |
6.2.2 Charakterystyki.
6.3 Obliczanie sprawności.
P1- moc pobrana
ΔPFe - straty w obwodzie magnetycznym stojana
ΔPm - straty mechaniczne
ΔPobc - straty obciążenia
ΔPwzb - straty wzbudzenia
P1 = 5300 W
ΔPwzb= If2 ⋅ Rf = 62*2,63 = 94,7 W
Z wykresu odczytujemy:
ΔPobc=371,2 W
ΔPm= 262 W
ΔPFe= 192 W
η=![]()
=![]()
= 0,83
7. Wnioski.
Pierwszym punktem naszego ćwiczenia było przeprowadzenie rozruchu silnika synchronicznego. Jak wiemy jest kilka sposobów rozruchu m.in.: częstotliwościowy, asynchroniczny lub przy pomocy innej maszyny. My wykorzystaliśmy ten drugi z uwagi na to, że badana przez nas maszyna wyposażona została w klatkę rozruchową. Jest to najczęściej stosowana obecnie metoda rozruchu gdyż nie wymaga skomplikowanych i drogich tyrystorowych lub tranzystorowych przemienników częstotliwościowych (rozruch częstotliwościowy) czy „obcej” maszyny doprowadzającej do prędkości synchronicznej.
W punkcie drugim przeprowadzaliśmy pomiar charakterystyk kątowych, którego wyniki zamieszczone są w tabelach. Nie można było wykonać pomiarów dla ϑ > 40 ponieważ spowodowałoby to przeciążenie maszyny (przekroczenie prądu znamionowego itp.). Z charakterystyki kątowej widać, że wraz ze wzrostem kąta ϑ parabolicznie rośnie moc P, tym bardziej im większy jest prąd wzbudzenia If. Zniekształcenia tych przebiegów jak również to, że w pewnym zakresie krzywa dla prądu wzbudzenia równego 5 A znajdowała się powyżej krzywej dla prądu równego 6 A mogą wynikać z błędów towarzyszących do których można zaliczyć: trudności w utrzymaniu niektórych wielkości na stałym poziomie, trudności w dokładnym odczycie wartości z mierników (balansowanie wskazówek mierników wywołane „gotującym się” roztworem w beczce oporowej), itp.
Ostatnim punktem ćwiczenia było wyznaczanie strat mechanicznych i w rdzeniu oraz strat obciążeniowych. Obie charakterystyki są w przybliżeniu prostoliniowe co świadczy o małym wpływie błędów pomiarowych na ich kształt.
Wyszukiwarka
Podobne podstrony:
cw4 - jednokierunkowe tyrystory irek, Przwatne, Studia, semestr 5, Laboratoria, Maszyny skrypt, spra
elektroener, Przwatne, Studia, semestr 5, Laboratoria, Maszyny skrypt, sprawka
2 uklady trojfazowe, Przwatne, Studia, semestr 5, Laboratoria, Maszyny skrypt
oznaczenia kabli, Przwatne, Studia, semestr 5, Laboratoria
silnika- projekt, Przwatne, Studia, semestr 5, Studia Pulpit, napedy projekty, projekty got, projekt
cw2energo, Przwatne, Studia, semestr 5, Laboratoria, Energoelektronika, sprawka, 002
Tabela 1.5 i 1.6, Przwatne, Studia, semestr 5, Laboratoria, Tabele
Projekt z silników szeregowych1, Przwatne, Studia, semestr 5, Studia Pulpit, napedy projekty, projek
Tabela 1.7 i 1.8, Przwatne, Studia, semestr 5, Laboratoria, Tabele
Tabela 1.3 i 1.4, Przwatne, Studia, semestr 5, Laboratoria, Tabele
Generator synchroniczny, Przwatne, Studia, semestr 5
Silnik obcowzbudny S1 0 mocy PN, Przwatne, Studia, semestr 5, Studia Pulpit, napedy projekty, projek
cw 15 silnik szeregowy, PWR ETK, Semestr VI, Maszyny elektryczne 3 Laboratorium
gensynch, Przwatne, Studia, semestr 5, generator synchroniczny
generator synchroniczny (nasz), Przwatne, Studia, semestr 5
badanie rezystancji izolacji stanowiska - protokol, Przwatne, Studia, Semestr 4, Elektroenergetyka
3-L88, Przwatne, Studia, Semestr 4, Elektroenergetyka, Lab, wachta, 3 4, lab3
napęd elekt nr20, Przwatne, Studia, semestr 5, Studia Pulpit, napedy projekty, projekty got, projekt
więcej podobnych podstron