Materiały pomocnicze do ćwiczenia nr 3
Silniki bezszczotkowe z komutacją elektroniczną
Silniki bezszczotkowe z komutacją elektroniczną możemy podzielić na dwie kategorie. Pierwsza z nich są to
silniki które zawierają magnesy trwałe. Drugą kategoria to silniki bez magnesów trwałych. Zalicza się do nich
silnik reluktancyjny przełączalny (switched reluctance motor). Silniki bezszczotkowe z magnesami trwałymi
mogą być zasilane napięciem trapezoidalnym (BLDCM – brushless direct current motor) lub sinosoidalnym
(PMSM – permanent magnet synchronous motor). W tym materiale zostaną omówione tylko silniki
bezszczotkowe z magnesami trwałymi wzbudzane napięciem trapezoidalnym.
Bezszczotkowe silniki DC są znane od bardzo dawna, jednak ich powszechne zastosowanie umożliwiły dopiero
tanie scalone sterowniki impulsowe. Budowa silnika z wirującym magnesem jest "odwróceniem" budowy silnika
komutatorowego z magnesem trwałym: uzwojenia znajdują się w stojanie a wirnik wykonany jest z odpowiednio
ukształtowanego magnesu. Ze względu na liczbę uzwojeń, wyróżniamy silniki bezszczotkowe 2-pasmowe i†3-
pasmowe, natomiast w zależności od sposobu zasilania uzwojeń - silniki unipolarne i bipolarne.
Właściwości i zastosowanie
Parametry mechaniczne silnika BLDC są porównywalne z silnikiem komutatorowym prądu stałego
wzbudzanego magnesami trwałymi – podobna moc i moment obrotowy przy zbliżonych wymiarach i masie.
Istotnymi ich zaletami są: wysoka trwałość limitowana praktycznie trwałością łożysk, możliwość bardzo
precyzyjnej regulacji prędkości obrotowej którą umożliwiają zaawansowane układy sterowników poprzez
sterowanie kątem obrotu wirnika.
Cena silnika bezszczotkowego jest jednak znacznie wyższa od podobnego silnika komutatorowego.
Kompensuje ją jednak znacznie wydłużona trwałość silnika. Możliwość precyzyjnego sterowania powoduje, że
w wielu aplikacjach są one znaczną konkurencją dla silnika skokowego. Szczególnie dotyczy to napędów
pracujących przy wyższych prędkościach obrotowych. Dodatkowo są od nich mniejsze i lżejsze.
Obecnie silniki BLDC są stosowane powszechnie w serwonapędach maszyn oraz w sprzęcie powszechnego
użytku (np. napędy CD/DVD). Wyparły one praktyczne całkowicie silniki skokowe z napędu dysków twardych.
Bardzo często sterownik silnika jest zintegrowany z silnikiem stanowiąc jego integralną część. W
najprostszych rozwiązaniach na zewnątrz wyprowadzone są tylko 2 zaciski zasilania, co umożliwia regulacje
kierunku i prędkości obrotowej (niektóre wbudowane sterowniki zmieniają kierunek obrotów przy zmianie
biegunowości zasilania). W bardziej rozbudowanych są wejścia sterujące (analogowe lub cyfrowe) do regulacji
obrotów. Najwyższej klasy sterowniki mają wejścia komunikacji szeregowej, umożliwiające konfigurowanie
sterownika za pomocą mikroprocesora, komputera PC lub współpracę ze sterownikami PLC, czujnikami
położenia i mają wbudowane algorytmy rozpędzania/hamowania i wiele innych aplikacji. Sterowniki wyższej
klasy zazwyczaj stanowią odrębny moduł który jest dołączany do silnika.
Silnik 2-pasmowy
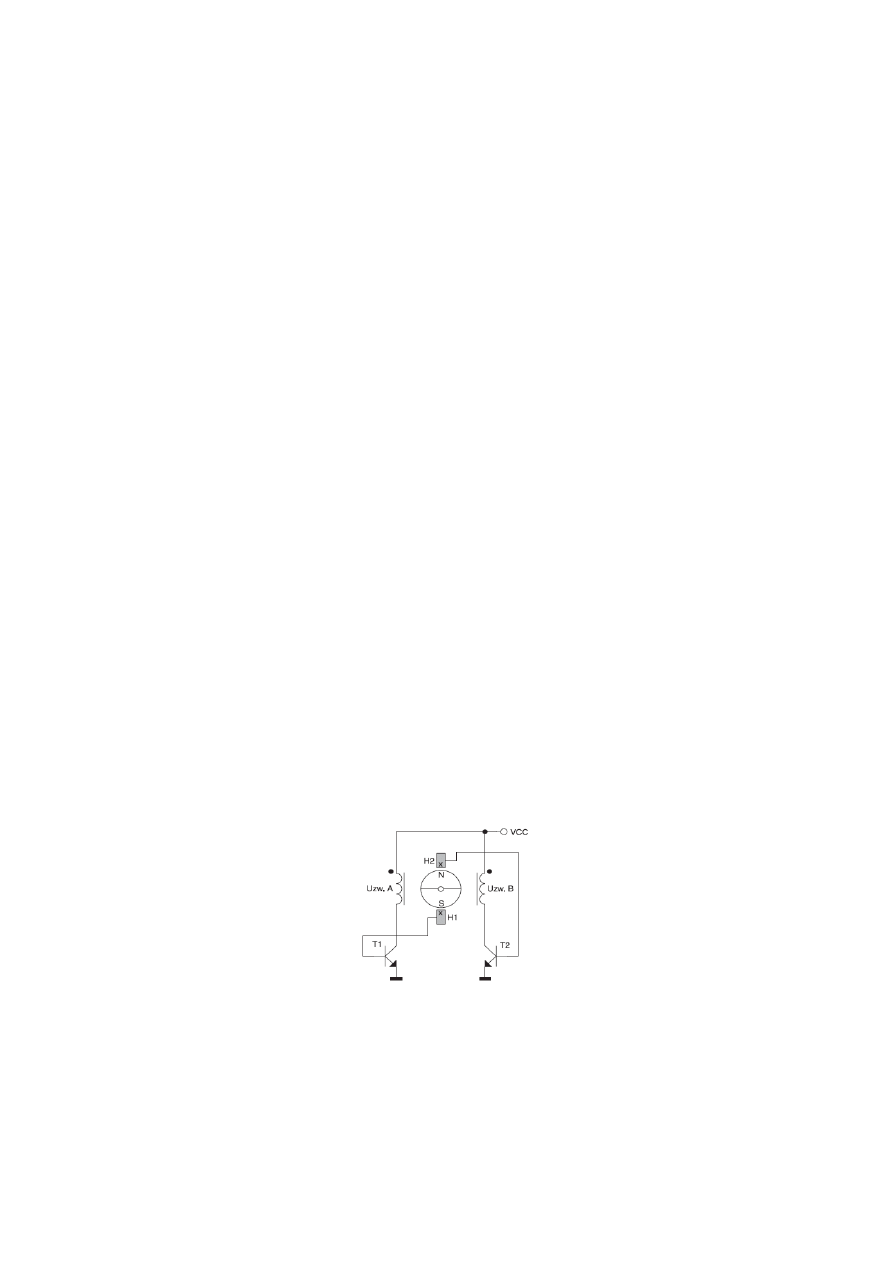
Zasada działania i uproszczony schemat silnika 2-pasmowego przedstawiono na rysunku 1.1. Elementy
oznaczone jako H1 i H2 to czujniki Halla (scalone czujniki pola magnetycznego). Typowy czujnik Halla
stosowany w silnikach jest elementem 3-końcówkowym („+”, „-„ i wyjście) w obudowie zbliżonej do obudowy
tranzystora małej mocy. Pod wpływem pola magnetycznego o określonej biegunowości, wyjście czujnika
zmienia swój stan w momencie przekroczenia progowej wartości pola magnetycznego. Produkowane są również
czujniki bipolarne które wychwytują nie tylko zmianę wartości pola, ale również jego biegunowość.
Rys.1.1 Zasada działania i uproszczony schemat silnika 2-pasmowego
W układzie o schemacie pokazanym na rysunku 1.1 czujniki Halla powodują przepływ prądu przez uzwojenie A
lub B w zależności od położenia kątowego wirnika. Pole magnetyczne cewek oddziałuje z magnesem, czego
wynikiem jest obrót wirnika. Analizując działanie układu łatwo zauważyć, że moment obrotowy jest
maksymalny w momencie poziomego ustawienia osi magnetycznej wirnika, natomiast po obróceniu wirnika o
90
moment wynosi zero. Konsekwencją tego faktu jest niemożność uruchomienia silnika przy niektórych
położeniach wirnika. Można sobie poradzić z tym problemem poprzez podział uzwojeń na pasma ułożone
naprzemiennie, zwiększając liczbę biegunów magnetycznych wirnika. Przykład silnika o takiej budowie
pokazano na rysunku 1.2. Każde uzwojenie jest podzielone na cztery części, a wirnik posiada 4 bieguny.
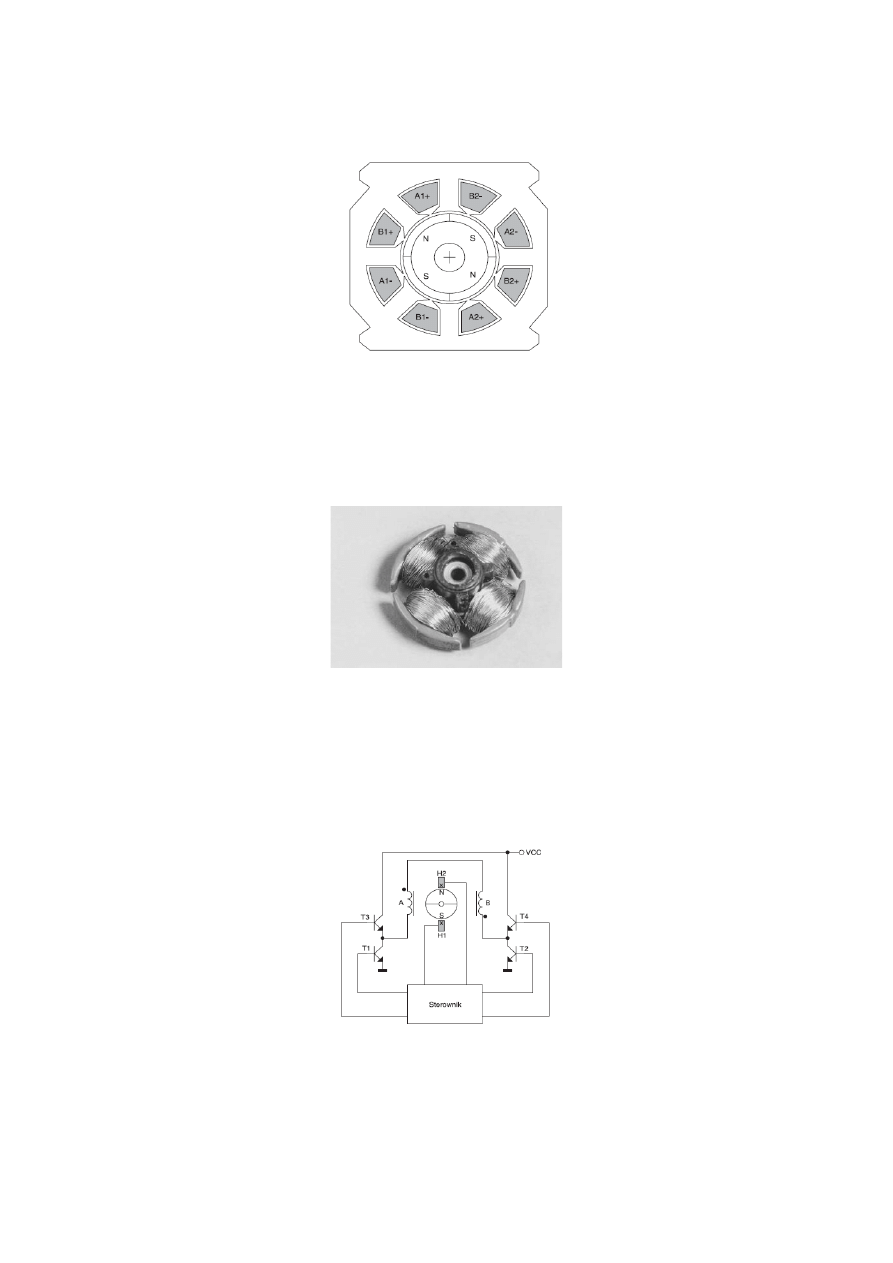
Symbole „+” i „-„ oznaczają kierunki uzwojeń, sekcje A1+, A2+, A1-, A2- są połączone szeregowo
(analogiczne skonfigurowane jest uzwojenie B). W tak skonstruowanym silniku zmiany momentu obrotowego w
funkcji kąta obrotu wirnika są mniejsze, ale nadal dokuczliwe.
Rys.1.2. Zmodyfikowana konstrukcja silnika 2-pasmowego
Nieco zmodyfikowany układ z rysunku 1.1 jest powszechnie stosowany w miniaturowych wentylatorach,
używanych m.in. do chłodzenia urządzeń elektronicznych. Ze względu na brak generatora ustalającego prędkość
obrotową, można zmieniać obroty takich wentylatorów poprzez zmianę napięcia zasilającego (w zakresie
50...120% prędkości znamionowej). Niestety przy takim sterowaniu moment obrotowy maleje przy zmniejszaniu
obrotów. Poniżej pewnego napięcia granicznego wentylator może przestać pracować z powodu zadziałania
układów zabezpieczających przed przeciążeniem. Na rysunku 1.3 pokazano stojan silnika przeznaczonego do
napędu wentylatora. Aby wyeliminować problem z rozruchem zastosowano w tym przypadku celową
deformację nadbiegunników stojana.
Rys.1.3. Budowa stojana silnika przeznaczonego do napędu maleńkiego wentylatora
Wykorzystanie miedzi w silnikach u z rysunku 1.3 nie jest najlepsze (sterowanie unipolarne) ponieważ prąd
płynie naprzemian przez uzwojenie A lub B. Znacznie bardziej efektywne jest zasilanie bipolarne silnika
pokazane na rys.1.4. Zastosowanie czterech tranzystorów układu mostkowego typu H umożliwia zmianę
kierunku prądu przepływającego poprzez uzwojenia i zasilanie obu uzwojeń jednocześnie, dzięki czemu siła
działająca na wirnik je 2-krotnie większa. Na schemacie z rysunku 1.4 cewki są połączone szeregowo. W
praktycznych układach sterowników czasami stosuje się dwa oddzielne mostki zasilające po jednym dla każdego
pasma. Sterowanie bipolarne 2-pasmowego silnika powoduje wzrost momentu obrotowego, lecz nadal nie
rozwiązuje problemu zależności momentu od kąt obrotu wirnika. Dlatego znacznie lepsze pod tym względem są
konstrukcje 3-pasmowe.
Rys.1.4. Układ do sterowania bipolarnego silnika 2-pasmowego
Silnik trójpasmowy
Silniki trójpasmowe maja trzy uzwojenia: A, B i C. Mogą być sterowane niezależnie w układzie unipolarnym
(praktycznie nie spotykane), ale zazwyczaj uzwojenia są połączone w gwiazdę (rys.1.5). Każde z trzech uzwojeń
jest podzielone na dwie części, co tworzy 6-biegunowy stojan. wirnik pokazany na rysunku posiada tylko dwa
bieguny, ale w praktycznych rozwiązaniach stosuje się wirniki cztero lub sześciobiegunowe.
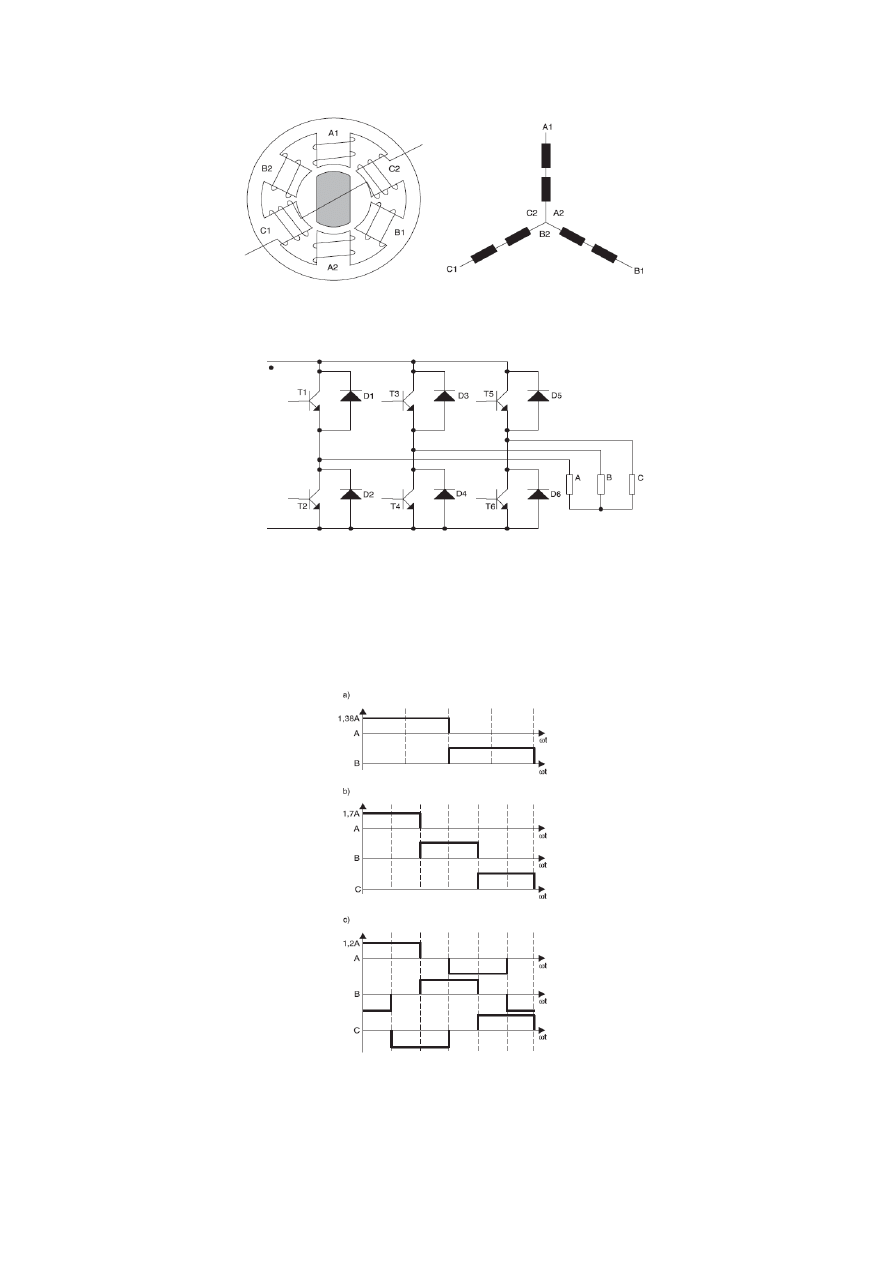
Rys.1.5. Przekrój silnika 3-pasmowego oraz sposób połączenia jego uzwojeń
Bipolarne sterowanie uzwojeń może być realizowane według schematu pokazanego na rysunku 1.6. W silniku
2-pasmowym do sterowania wymagane są dwa przebiegi prostokątne, przesunięte o 180
, silnik 3-pasmowy
wymaga trzech przebiegów przesuniętych o 120
.
Rys.1.6. Bipolarny sterownik silnika 3-pasmowego
Na rysunku 1.7 przedstawiono idealizowane przebiegi czasowe prądów płynących w poszczególnych pasmach
dla silnika 2-pasmowego oraz 3-pasmowego przy sterowaniu unipolarnym i bipolarnym.
Zasadę działania silnika wyjaśniono na rysunku 1.8, na którym przedstawiono poszczególne fazy obrotu
wirnika w przypadku sterowania pasm według sekwencji pokazanej na rysunku 1.7c. Zmiany momentu
obrotowego w funkcji kąta obrotu wirnika są w silniku 3-pasmowym stosunkowo niewielkie. Można je jeszcze
zminimalizować stosując odpowiednie algorytmy sterowania. W celu uzyskania praktycznie gładkiego momentu
wymagany jest sinusoidalny przebieg prądu w poszczególnych pasmach, ale wówczas w zasadzie nie jest to już
silnik prądu stałego.
Rys.1.7. Przebiegi czasowe prądów poszczególnych pasm dla silnika a) 2-pasmowego i sterowaniu unipolarnym, b) 3-
pasmowego i sterowaniu unipolarnym, c) 3-pasmowego i sterowaniu bipolarnym
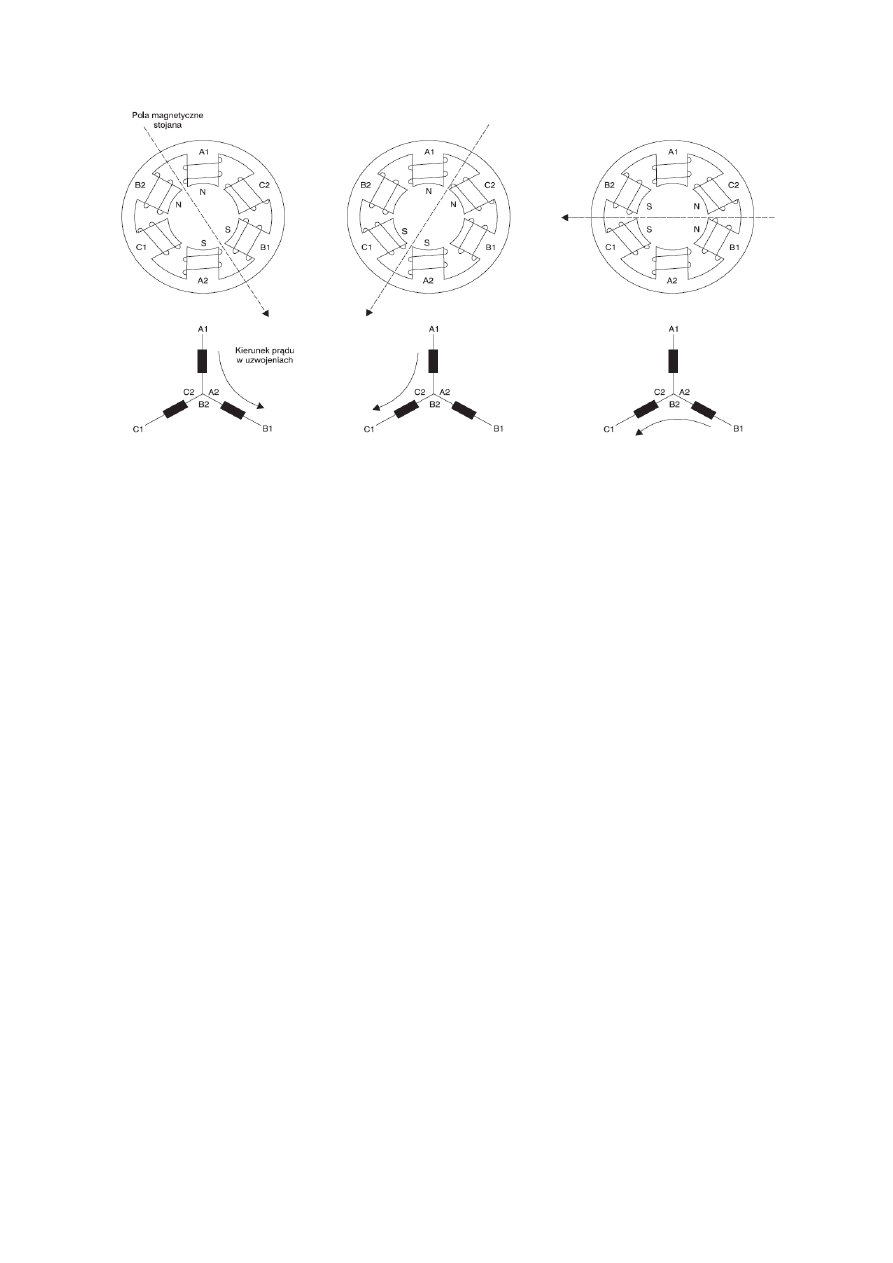
Rys.1.8. Zasada działania silnika 3-pasmowego
Podział silników ze względu na rodzaj wirnika
Silniki BLDC (i nie tylko) mogą mieć różną budowę wirnika. Silnik z wirnikiem wewnętrznym ma budowę
”klasyczną”, czyli wirnik w kształcie walca znajduje się wewnątrz stojana z uzwojeniami. W silniku z wirnikiem
zewnętrznym, magnetyczny wirnik ma kształt kubka i obraca się wokół nieruchomego stojana. Silnik z
wirnikiem zewnętrznym ma większy moment obrotowy, ale i większą bezwładność, co ogranicza jego
zastosowanie, gdy wymagane jest bardzo szybkie rozpędzanie i hamowanie silnika. Duży moment bezwładności
może być jednak dużą zaletą w niektórych przypadkach ponieważ może bardzo ułatwia stabilizację prędkości
obrotowej w przypadku zmiany momentu obciążenia. Dodatkowo taki wirnik jest mało podatny na drgania które
mogą się pojawić przy pracy z dużą prędkością obrotową. Takie rozwiązanie jest stosowane masowo w
napędach dysków twardych, CD, DVD, wiatrakach itp. gdzie zależy nam na stabilizacji prędkości obrotowej.
Wyszukiwarka
Podobne podstrony:
cwiczenie nr 1 materialy pomocn Nieznany
cwiczenie nr 2 materialy pomocn Nieznany
cwiczenie nr 1 materialy pomocn Nieznany
cwiczenia nr 5 Pan Pietrasinski Nieznany
Cwiczenie nr 8 id 99953 Nieznany
Cwiczenie nr 2 4 id 99899 Nieznany
2012 KAK Materialy pomocnicze I Nieznany
Cwiczenie nr 5 Automatyzacja po Nieznany
Cwiczenie nr 1 id 594720 Nieznany
Cwiczenie Nr 3 id 125025 Nieznany
Cwiczenie nr 3 Wzorcowanie zwez Nieznany
Cwiczenie Nr 2 3 id 125713 Nieznany
Cwiczenia nr 4 zadanie dodatkow Nieznany
Cwiczenie nr 3 id 99908 Nieznany
cwiczenie nr 2 3 id 125714 Nieznany
więcej podobnych podstron