Politechnika Rzeszowska
1
Katedra Elektrodynamiki i Układów Elektromaszynowych
Opracował: dr inż. Piotr Bogusz, dr inż. Mariusz Korkosz - Laboratorium Sterowania
Napędów Elektrycznych
Rzeszów, 5.05.2006/16.02.2007
SILNIK RELUKTANCYJNY PRZEŁĄCZALNY – PODSTAWY
TEORETYCZNE
1. Budowa i zasada działania silników reluktancyjnych przeł
ą
czalnych
W silnikach reluktancyjnych przełączalnych moment elektromagnetyczny wytwarzany jest na
zasadzie zmiany reluktancji obwodu magnetycznego. Kiedy uzwojenie danego pasma jest
zasilone, pole magnetyczne wytworzone przez parę biegunów stojana wciąga najbliższą parę
przeciwległych zębów wirnika dążąc do ustawienia ich w położeniu, w którym obwód
magnetyczny osiąga minimalną reluktancję. Kierunek momentu elektromagnetycznego
wytwarzanego przez silnik reluktancyjny przełączalny nie zależy od kierunku przepływu
prądu w uzwojeniach, przez co upraszcza się jego układ zasilający. Uzwojenia silnika
zasilane są impulsowo poprzez układ energoelektroniczny, synchronicznie z położeniem
wirnika. Do wyznaczenia położenia wirnika stosowane są czujniki położenia (enkodery,
resolwery, czujniki Hall’a, czujniki optyczne) lub metody bezczujnikowe.
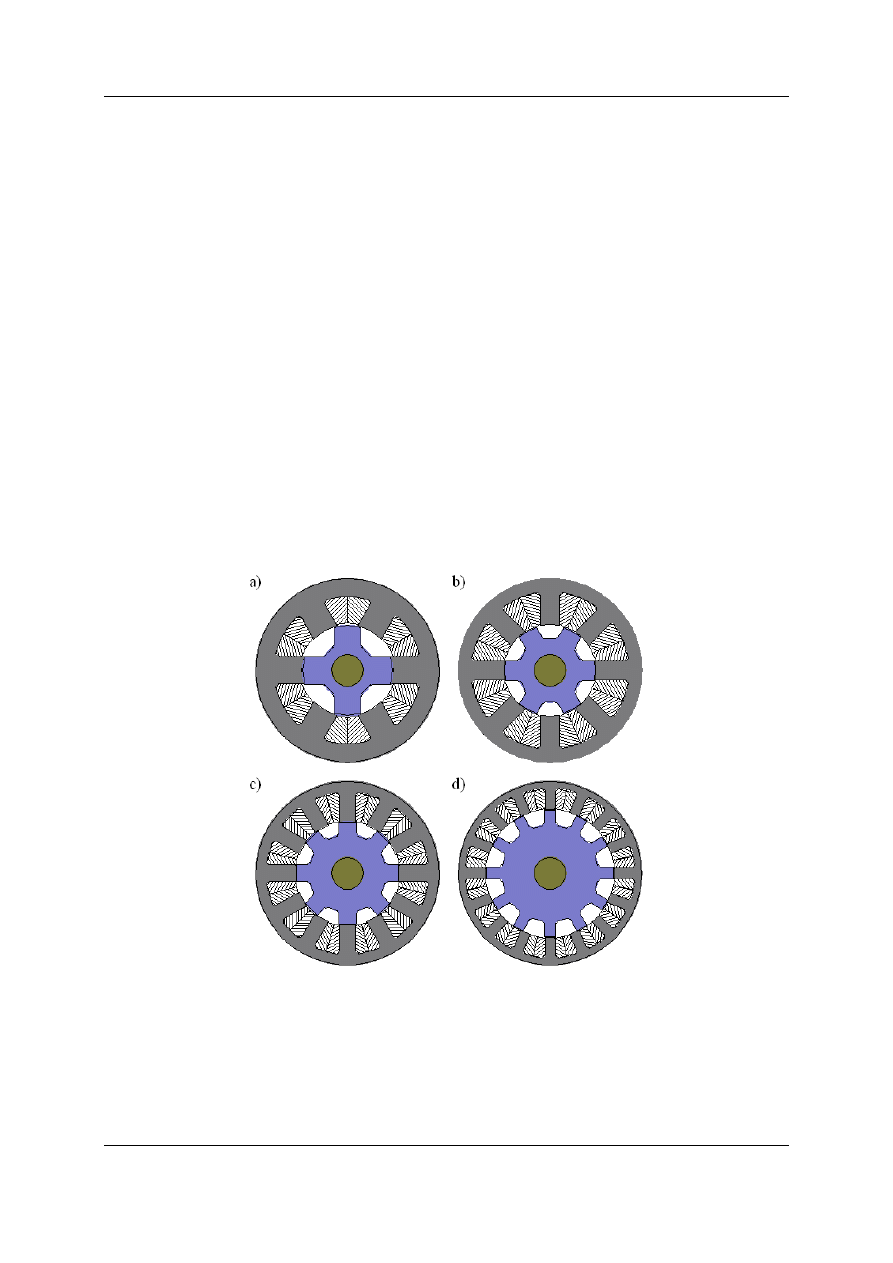
Istnieje wiele odmian konstrukcyjnych silników reluktancyjnych przełączalnych. Ze względu
na liczbę pasm silniki możemy podzielić na jednopasmowe oraz wielopasmowe (np.
dwupasmowe, trójpasmowe, czteropasmowe). Zarówno maszyny jednopasmowe jak i
wielopasmowe mogą posiadać po dwa bieguny stojana przypadające na jedno pasmo (są to
konstrukcje bazowe) lub odpowiednio więcej (zazwyczaj 4). Przykładowe najczęściej
spotykane rozwiązania konstrukcyjne pokazano na rysunku 1.
Rys.1. Przykładowe rozwiązania konstrukcyjne SRM a) trójpasmowa 6/4, b) czteropasmowa 8/6, c)
trójpasmowa12/8, d) czteropasmowa 16/12
Na rysunku 2 pokazano przekrój trójpasmowego silnika SRM 6/4 z zaznaczeniem
najistotniejszych
wymiarów
geometrycznych
oraz
z
uproszczonym
przebiegiem
indukcyjności własnej L
ph
jednego z pasm.
Politechnika Rzeszowska
2
Katedra Elektrodynamiki i Układów Elektromaszynowych
Opracował: dr inż. Piotr Bogusz, dr inż. Mariusz Korkosz - Laboratorium Sterowania
Napędów Elektrycznych
Rzeszów, 5.05.2006/16.02.2007
1
1’
β
s
α
s
β
r
α
r
L
u
L
a
θ
B
θ
C
θ
D
θ
E
θ
θ
A
θ
A
β
s
β
r
α
r
L(
θ
)
θ
u
=0
θ
a
(a)
(b)
Rys.2. a) Przekrój poprzeczny silnika reluktancyjnego przełączalnego 6/4 z uzwojeniem jednego pasma,
b) przebieg indukcyjności własnej L uzwojenia pasma aproksymowany liniowo
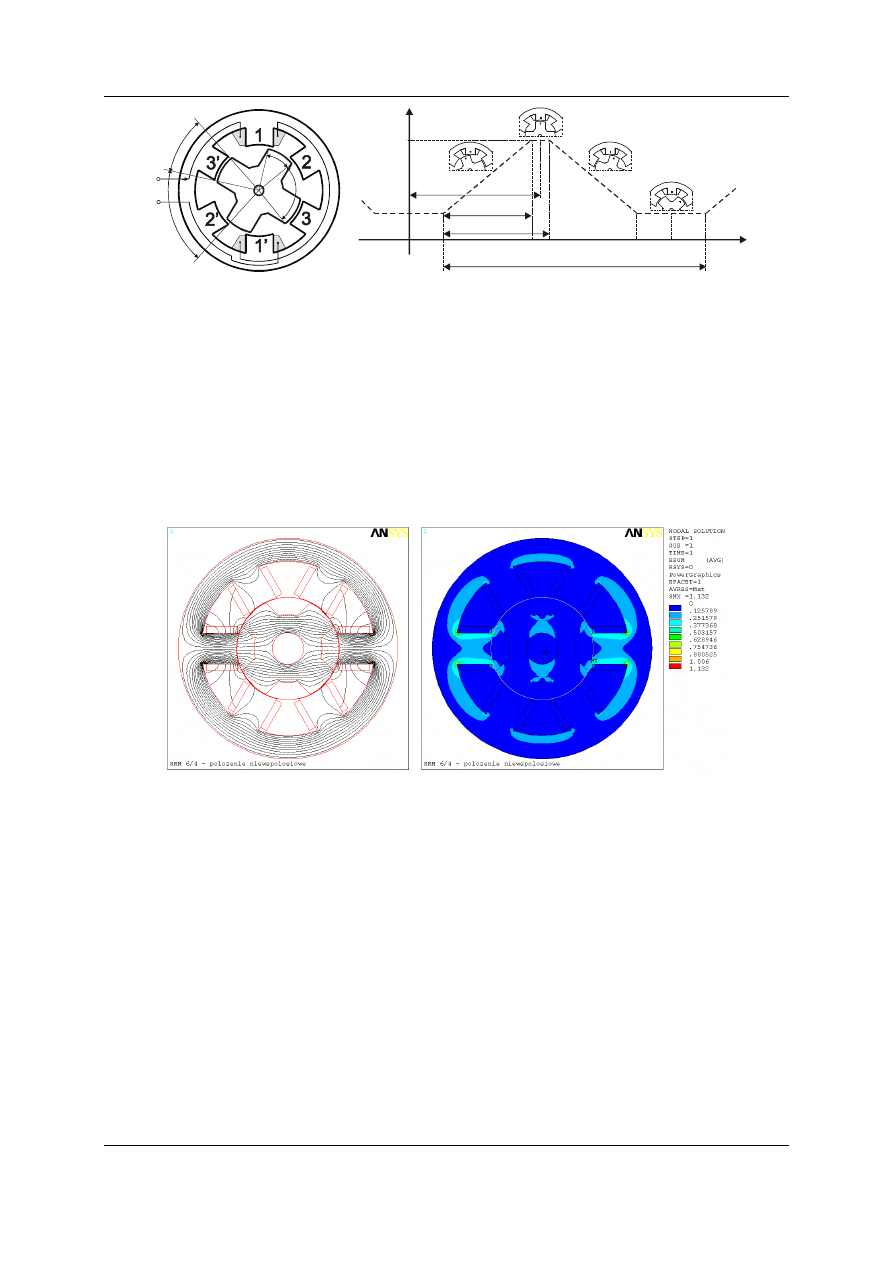
Rozkład izolinii strumienia magnetycznego oraz jego gęstości (indukcja B) dla czterech
charakterystycznych położeń wirnika z rysunku 2 pokazano na rysunku 3a, 3b, 3c i 3d.
Pierwszym z położeń jest położenie niewspółosiowe (
θ
u
) – rysunek 3a. Jest położenie
równowagi niestabilnej. Indukcyjność własna L
ph
pasma osiąga wartość minimalną oznaczaną
jako L
u
. Aktualnie zasilane pasmo w tym położeniu nie wytwarza momentu
elektromagnetycznego T
eph
.
a)
b)
Rys. 3a. Rozkład izolinii strumienia magnetycznego (a) oraz jego gęstości (b) dla położenia niewspółosiowego
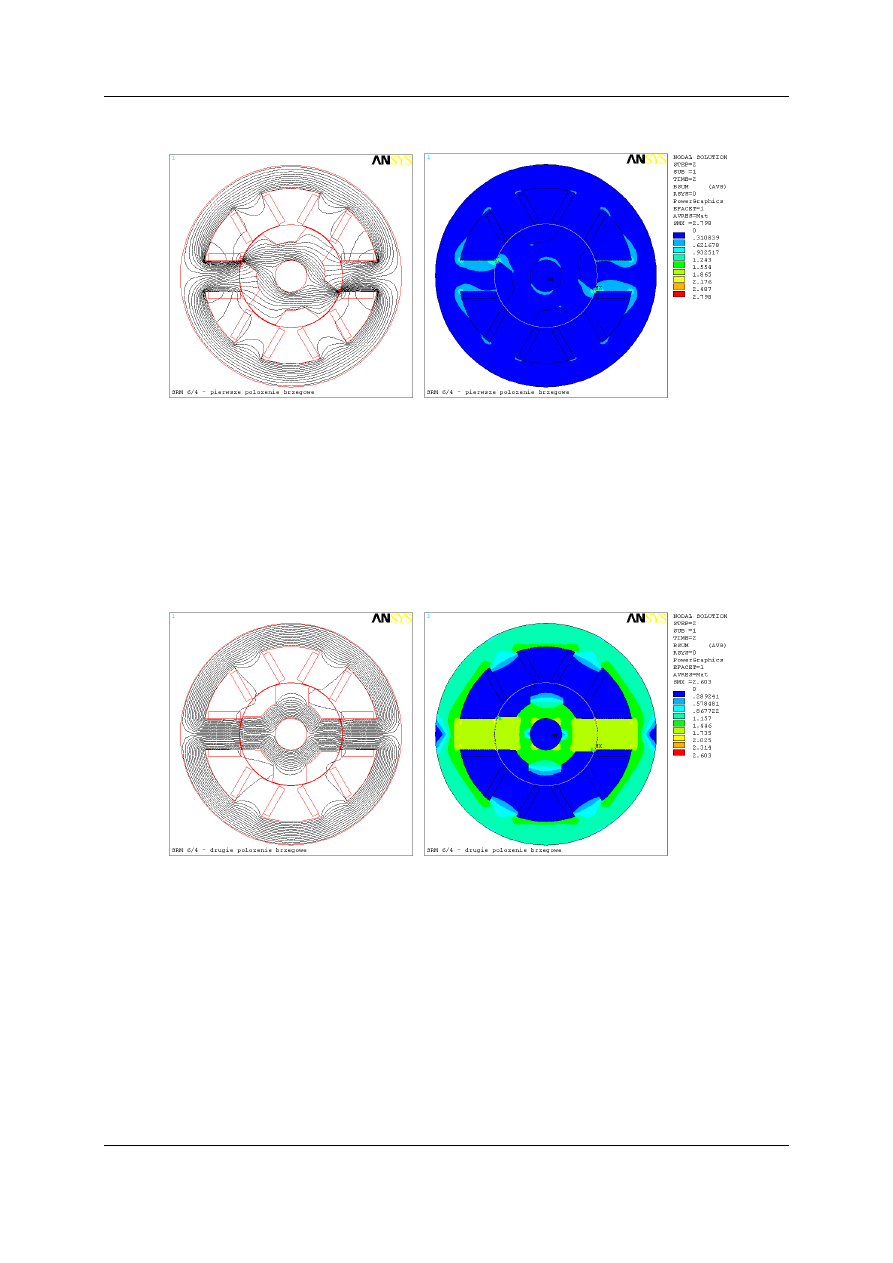
Od położenia
θ
A
- pierwsze położenie brzegowe (rys. 3b) następuje zauważalny wzrost
wartości
indukcyjności
własnej
pasma.
Wytwarzany
przez
pasmo
moment
elektromagnetyczny T
eph
osiąga wartość zbliżoną do wartości maksymalnej dla danej wartości
płynącego prądu w zależności od stopnia nasycenia obwodu magnetycznego. Od tego
położenia rozpoczyna się efektywna strefa wytwarzanie momentu dla danego pasma.
Politechnika Rzeszowska
3
Katedra Elektrodynamiki i Układów Elektromaszynowych
Opracował: dr inż. Piotr Bogusz, dr inż. Mariusz Korkosz - Laboratorium Sterowania
Napędów Elektrycznych
Rzeszów, 5.05.2006/16.02.2007
a)
b)
Rys.3b.
Rozkład izolinii strumienia magnetycznego (a) oraz jego gęstości (b) dla pierwszego położenia
brzegowego
Efektywna strefa wytwarzania momentu elektromagnetycznego dla danego pasma
teoretycznie kończy się w drugim położeniu brzegowym
θ
B
(rys. 3c). Dlatego też od tego
położenia przyrost indukcyjności własnej jest praktycznie znikomy. W rzeczywistości już
nieco wcześniej następuje już znaczne ograniczenie wartości wytwarzanego momentu. Z tego
też powodu wartość kąta
β
r
nie powinna być znacząco większa od
β
s
.
a)
b)
Rys. 3c.
Rozkład izolinii strumienia magnetycznego (a) oraz jego gęstości (b) dla drugiego położenia
brzegowego
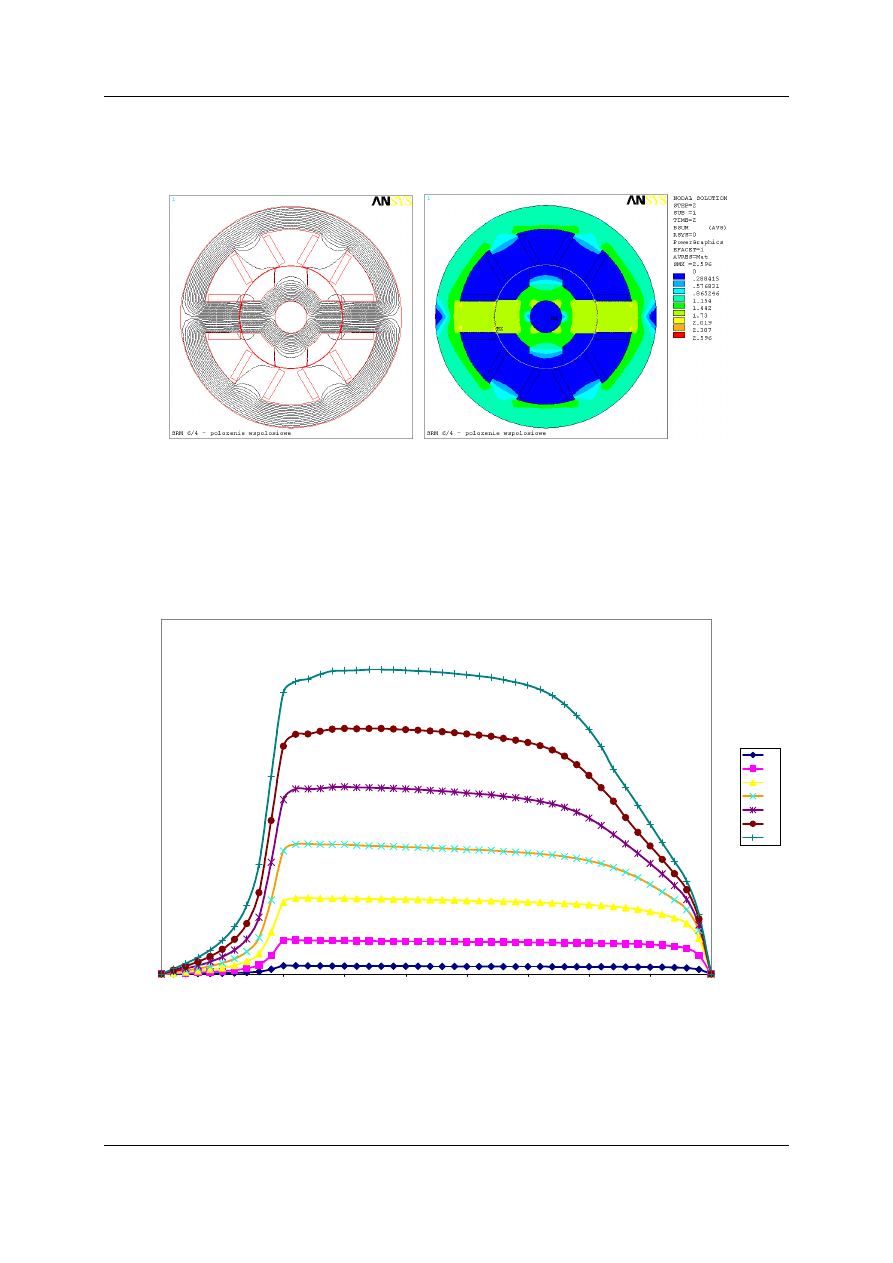
W położeniu współosiowym
θ
a
(rys.3d) indukcyjność własna pasma osiąga wartość
maksymalną (bez uwzględnienia zjawiska nasycenia obwodu magnetycznego). Zasilane
pasmo nie wytwarza momentu elektromagnetycznego. Jest to jednocześnie położenie
równowagi stabilnej.
Politechnika Rzeszowska
4
Katedra Elektrodynamiki i Układów Elektromaszynowych
Opracował: dr inż. Piotr Bogusz, dr inż. Mariusz Korkosz - Laboratorium Sterowania
Napędów Elektrycznych
Rzeszów, 5.05.2006/16.02.2007
a)
b)
Rys. 3d. Rozkład izolinii strumienia magnetycznego (a) oraz jego gęstości (b) dla położenia współosiowego
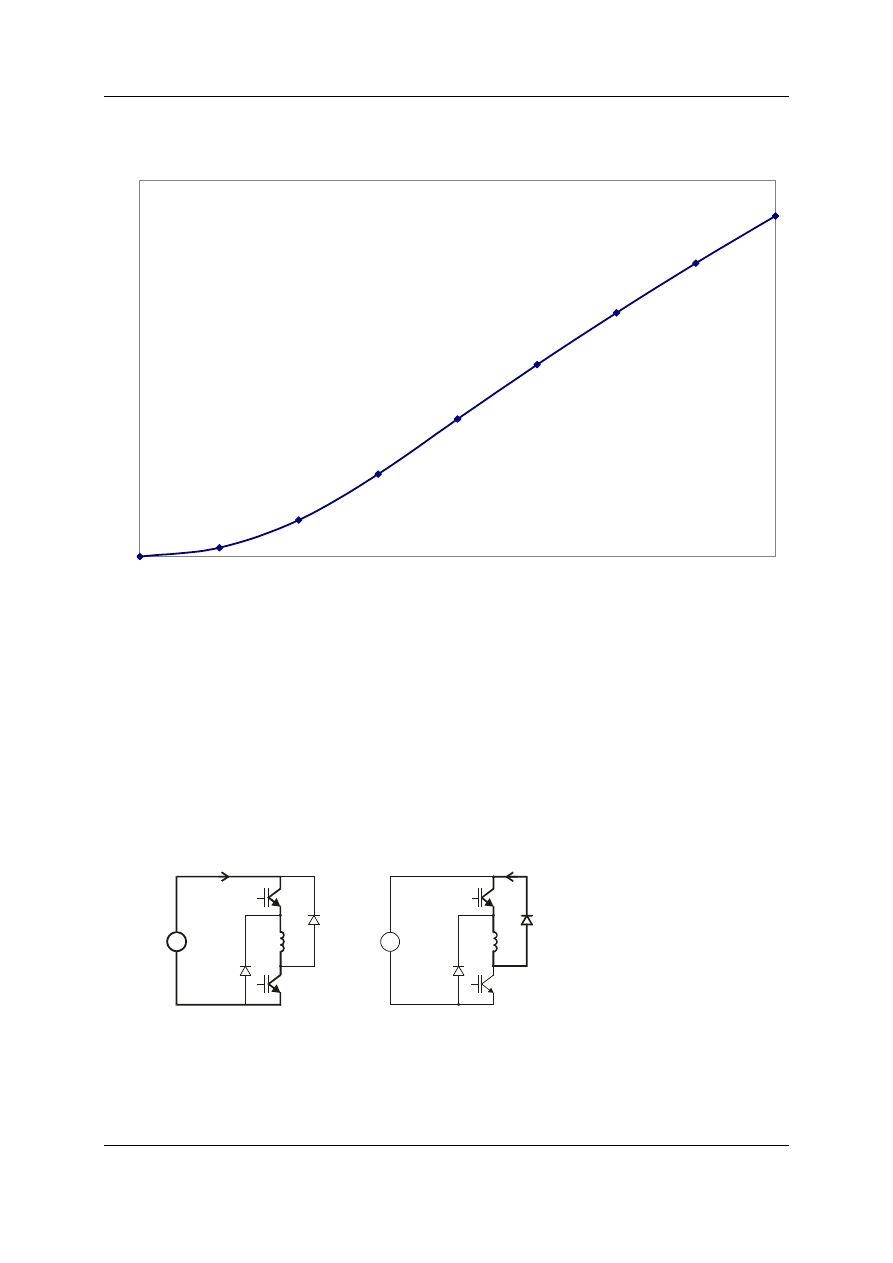
Przykładową zależność momentu elektromagnetycznego T
eph
w funkcji kąta położenia
wirnika
θ
dla różnych wartości płynącego prądu I w paśmie dla SRM 6/4 pokazano na
rysunku 4. Charakterystyki uzyskano na bazie obliczeń polowych. Widać na nich wyraźnie
nieliniową zależność pomiędzy wartością wytwarzanego momentu elektromagnetycznego
oraz położeniem wirnika.
0,00E+00
5,00E+00
1,00E+01
1,50E+01
2,00E+01
2,50E+01
3,00E+01
3,50E+01
4,00E+01
4,50E+01
Kąt położenia wirnika
M
o
m
en
t
e
le
k
tr
o
m
a
g
n
e
ty
cz
n
y
I
2*I
3*I
4*I
5*I
6*I
7*I
Rys. 4. Przykładowa zależność wytwarzanego momentu elektromagnetycznego T
eph
w funkcji położenia wirnika
θ
dla różnych I=var
W zakresie pracy silnika na liniowej części charakterystyki magnesowania B=f(H)
wytwarzany moment elektromagnetyczny zależy od kwadratu płynącego prądu I (T
eph
≈
k*I
2
).
Politechnika Rzeszowska
5
Katedra Elektrodynamiki i Układów Elektromaszynowych
Opracował: dr inż. Piotr Bogusz, dr inż. Mariusz Korkosz - Laboratorium Sterowania
Napędów Elektrycznych
Rzeszów, 5.05.2006/16.02.2007
Po wejściu w zakres nieliniowej części charakterystyki B=f(H) zależność pomiędzy
wytwarzanym momentem a prądem staje się proporcjonalna (T
eph
≈
k*I).
Prąd I
W
a
rt
o
ść
ś
re
d
n
ia
m
o
m
en
tu
T
e
av
Rys. 5. Przykładowa zależność wytwarzanej wartości średniej momentu elektromagnetycznego T
eav
w funkcji
wartości płynącego prądu I
Kształt charakterystyk momentowych a w konsekwencji wartość średnia wytwarzanego
momentu elektromagnetycznego T
eav
zależy od wymiarów geometrycznych (np. kątów
β
s
,
β
r
,
szczeliny powietrznej
δ
). Ogólne osiągi silnika zależą jednak nie tylko od wymiarów
geometrycznych silnika, ale również od sposobu jego sterowania.
Silnik reluktancyjny przełączalny jest przetwornikiem elektromechanicznym który nie może
pracować bez odpowiedniego układu zasilającego. Istnieje wiele odmian układów
zasilających przeznaczonych do zasilania SRM (np. układ półmostkowy, C-dump, split-dc).
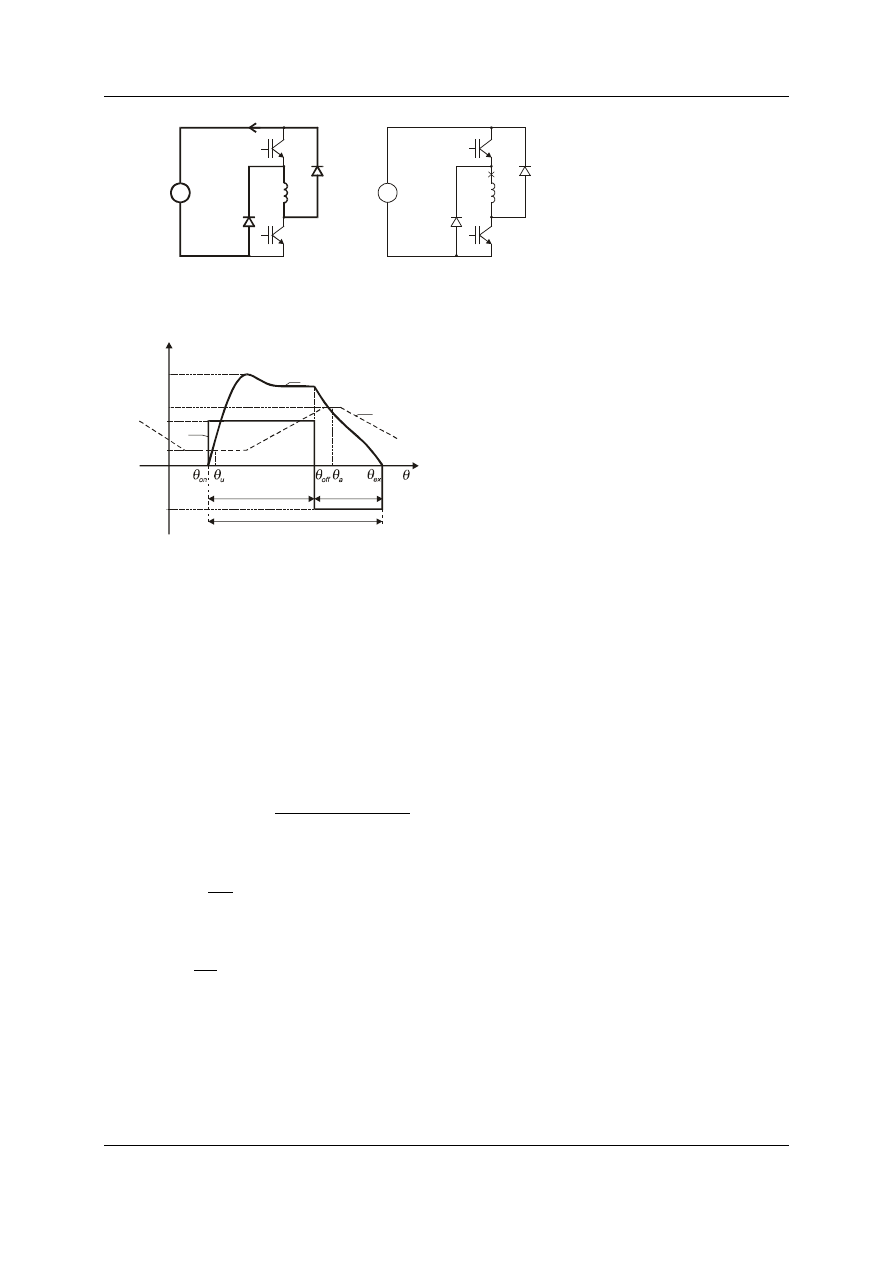
Na rysunku 6 przedstawiono najbardziej popularny półmostkowy układ zasilający jedno
pasmo silnika wraz z możliwymi stanami pracy tego układu.
=
i
T
1
T
2
D
1
D
2
a)
on
on
=
i
T
1
T
2
D
1
D
2
b)
on
off
Politechnika Rzeszowska
6
Katedra Elektrodynamiki i Układów Elektromaszynowych
Opracował: dr inż. Piotr Bogusz, dr inż. Mariusz Korkosz - Laboratorium Sterowania
Napędów Elektrycznych
Rzeszów, 5.05.2006/16.02.2007
=
i
T
1
T
2
D
1
D
2
c)
off
off
d)
=
i=0
T
1
T
2
D
1
D
2
off
off
Przykładowy przebieg prądu w paśmie silnika przy sterowaniu jednopulsowym
przedstawiono na rysunku 7.
u
i
L
I
max
i, L, u
-U
dc
U
dc
L
u
L
a
Q
S
Q
F
Q
CV
Całkowity przedział przewodzenia prądu
CV
Q
dla jednego cyklu zasilania pasma dla
sterowania jednopulsowego jest sumą:
-
przedziału zasilania
S
Q – zawartego pomiędzy kątami
θ
on
i
θ
off
,
-
przedziału zaniku prądu
F
Q
– zawartego pomiędzy kątami
θ
off
i
θ
ex
.
2. Model matematyczny SRM
Model ogólny
Pomijając zjawisko występowania prądów wirowych w silniku model matematyczny SRM
można przedstawić za pomocą następujących równań:
ph
1
j
j
j
j
1,2,...,
j
,
d
)]
,
,...,
(
[
d
ph
N
t
i
i
i
R
u
N
=
+
=
θ
ψ
(1)
e
L
d
d
T
T
B
t
J
=
+
+
ω
ω
(2)
ω
θ
=
t
d
d
(3)
gdzie poszczególne symbole oznaczają: u
j
– napięcie na uzwojeniu pasma, R
j
– rezystancja
uzwojenia pasma, i
j
– prąd pasmowy, J – moment bezwładności, B – współczynnik tarcia
lepkiego w ruchu obrotowym, T
L
– moment obciążenia,
ω
- prędkość kątowa wirnika.
Moment elektromagnetyczny określany jest jako pochodna funkcji koenergii magnetycznej
względem kąta obrotu wirnika
θ
Rys.6. Stany pracy układu
przekształtnika
zasilającego
jedno pasmo SRM.: a) aktywny
(zasilania), b) zerowy napięcia,
c) zwrotu energii do źródła
zasilania, d) bezprądowy
Rys.7. Przebieg prądu pasmowego (i), napięcia
pasmowego
(u)
przy
sterowaniu
jednopulsowym w funkcji kąta położenia
wirnika (
θ
)
Politechnika Rzeszowska
7
Katedra Elektrodynamiki i Układów Elektromaszynowych
Opracował: dr inż. Piotr Bogusz, dr inż. Mariusz Korkosz - Laboratorium Sterowania
Napędów Elektrycznych
Rzeszów, 5.05.2006/16.02.2007
∑
∫
=
∂
∂
=
ph
j
1
j
'
j
0
'
j
1
j
)
,
0
,...,
0
,
,...,
(
N
i
e
di
i
i
T
θ
ψ
θ
(4)
Model liniowy
Zakładając liniowość charakterystyki magnesowania blach rdzenia równania (1) i (4) można
zapisać:
ph
1,2,...,
j
,
)
(
)
(
N
L
i
dt
di
L
i
R
u
j
j
j
j
j
j
j
=
∂
∂
+
+
=
θ
θ
ω
θ
(5)
∑
=
∂
∂
=
ph
1
j
2
)
(
2
1
N
j
j
e
i
L
T
θ
θ
(6)
3. Charakterystyka mechaniczna
Silniki reluktancyjne przełączalne posiadają możliwość regulacji prędkości kątowej
w bardzo szerokim zakresie. Wielkościami bezpośrednio wpływającymi na osiągi silnika są:
•
napięcie zasilające uzwojenie pasma (u),
•
kąt załączenia (
θ
on
)
•
kąt wyłączenia (
θ
off
).
Zwiększanie prędkości wirowania wirnika powoduje wzrost napięcia rotacji, które ogranicza
zakres sterowania silnika dla założonej metody. Dlatego producenci SRM nie określają
charakterystyk mechanicznych (T=f(
ω
)) silnika, gdyż mogą być one kształtowane poprzez
zastosowanie odpowiedniej metody sterowania wynikającej z zadanych warunków pracy,
uzyskując tym samym optymalne parametry sterowania.
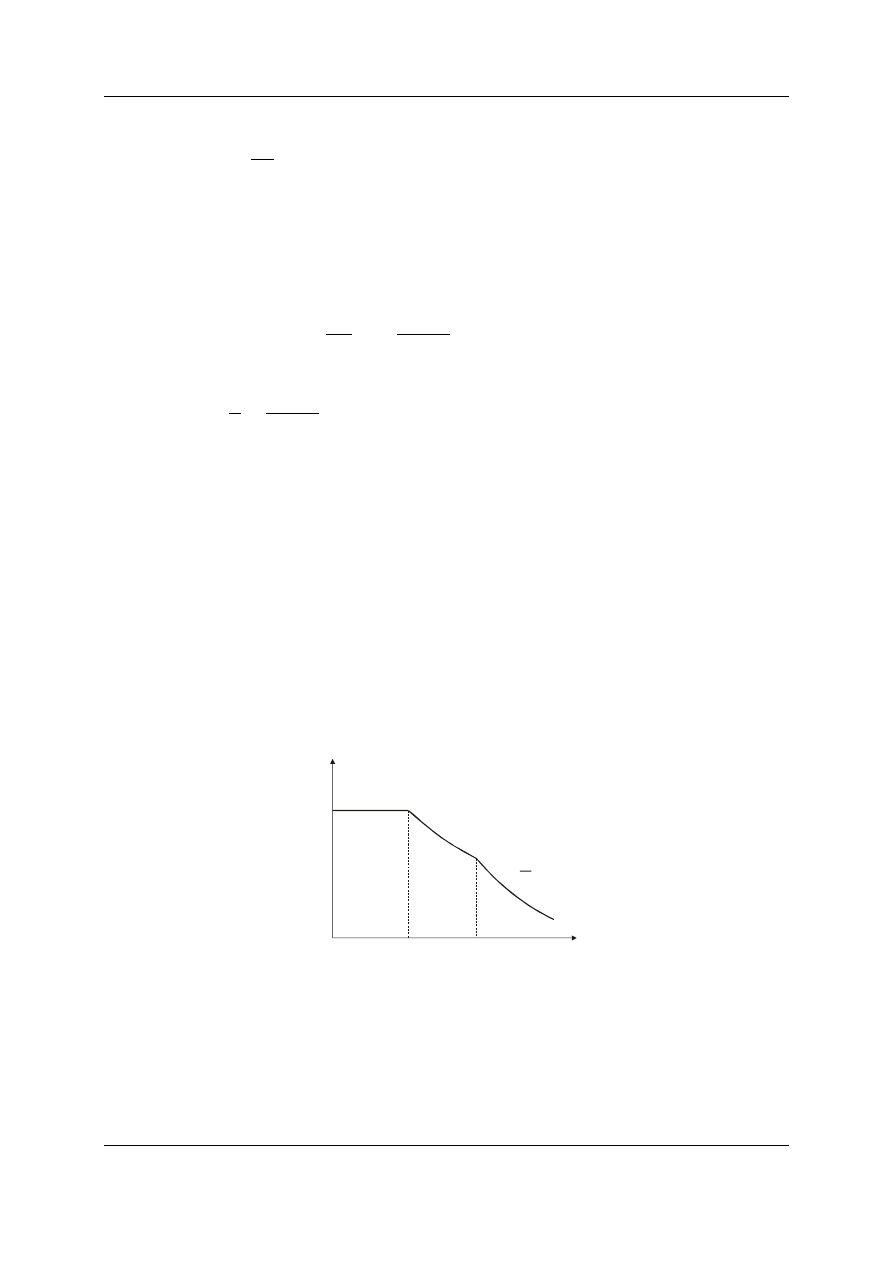
T
T = const
P = const
ω
ω
b
P ~
ω
c
1
ω
Rys.8. Charakterystyka mechaniczna silnika reluktancyjnego przełączalnego
Pracę SRM można podzielić na trzy podstawowe zakresy (rys.8):
•
Praca ze stałym momentem
- w tym zakresie silnik może pracować przy stałej
wartości momentu, od zera aż do prędkości bazowej
ω
b
. Jeśli napięcie źródła zasilania
U
dc
i kąty sterujące
θ
on
i
θ
off
są stałe, to prędkość bazowa wyznacza granicę, powyżej
której nie ma możliwości sterowania prądowego. Prędkość bazową można określić z
zależności:
Politechnika Rzeszowska
8
Katedra Elektrodynamiki i Układów Elektromaszynowych
Opracował: dr inż. Piotr Bogusz, dr inż. Mariusz Korkosz - Laboratorium Sterowania
Napędów Elektrycznych
Rzeszów, 5.05.2006/16.02.2007
u
a
s
s
max
dc
b
)
(
Ψ
Ψ
R
I
U
−
−
=
β
ω
(7)
gdzie: U
dc
- napięcie źródła zasilania, I
max
- wartość maksymalna prądu pasmowego,
R
s
- rezystancja uzwojenia pasma stojana,
β
s
- szerokość bieguna stojana (w
radianach),
ψ
a
- strumień sprzężony z prądem I
max
przy położeniu współosiowym
bieguna stojana i wirnika,
ψ
u
- strumień sprzężony z prądem I
max
przy położeniu
niewspółosiowym obu biegunów.
Dodatkowo, zakres ten może zostać poszerzony przez zmianę kątów sterujących. śądana
ś
rednia wartość momentu może być uzyskiwana przez regulację prądu pasmowego.
•
Praca ze stałą mocą
- wraz ze wzrostem prędkości wirowania wirnika wzrasta
napięcie rotacji, uniemożliwiając tym samym regulację prądu, ze względu na
ograniczoną wartość napięcia zasilającego. Zwiększając liniowo z prędkością
szerokość przedziału zasilania, możliwe jest uzyskanie stałej mocy na wale silnika.
Jednak zwiększanie przedziału przewodzenia jest ograniczone do prędkości
ω
c
, która
stanowi granicę pomiędzy przewodzeniem impulsowym, a przewodzeniem ciągłym.
•
Praca z opadającą mocą - kiedy prędkość silnika przekroczy wartość
ω
c
wówczas,
aby uniknąć przewodzenia ciągłego kąt załączenia nie może być więcej wyprzedzany i
moment spada szybciej, powodując, że nie jest możliwe utrzymanie stałej mocy na
wale silnika. Przewodzenie ciągłe jest niebezpieczne dla silnika ze względu na wzrost
wartości prądu płynącego przez uzwojenie, co może być przyczyną termicznego
uszkodzenia uzwojeń. Niemniej jednak przewodzenie ciągłe przyczynia się do
wzrostu gęstości mocy w silniku, a tym samym wzrostu średniej wartości
wytwarzanego momentu. Dlatego w celu uzyskania chwilowego wzrostu mocy silnika
można celowo doprowadzić do przewodzenia ciągłego.
4. Metody sterowania silników reluktancyjnych przeł
ą
czalnych
Do sterowania silników reluktancyjnych przełączalnych stosuje się trzy podstawowe metody
sterowania:
•
Prądowe
•
Napięciowe
•
Jednopulsowe
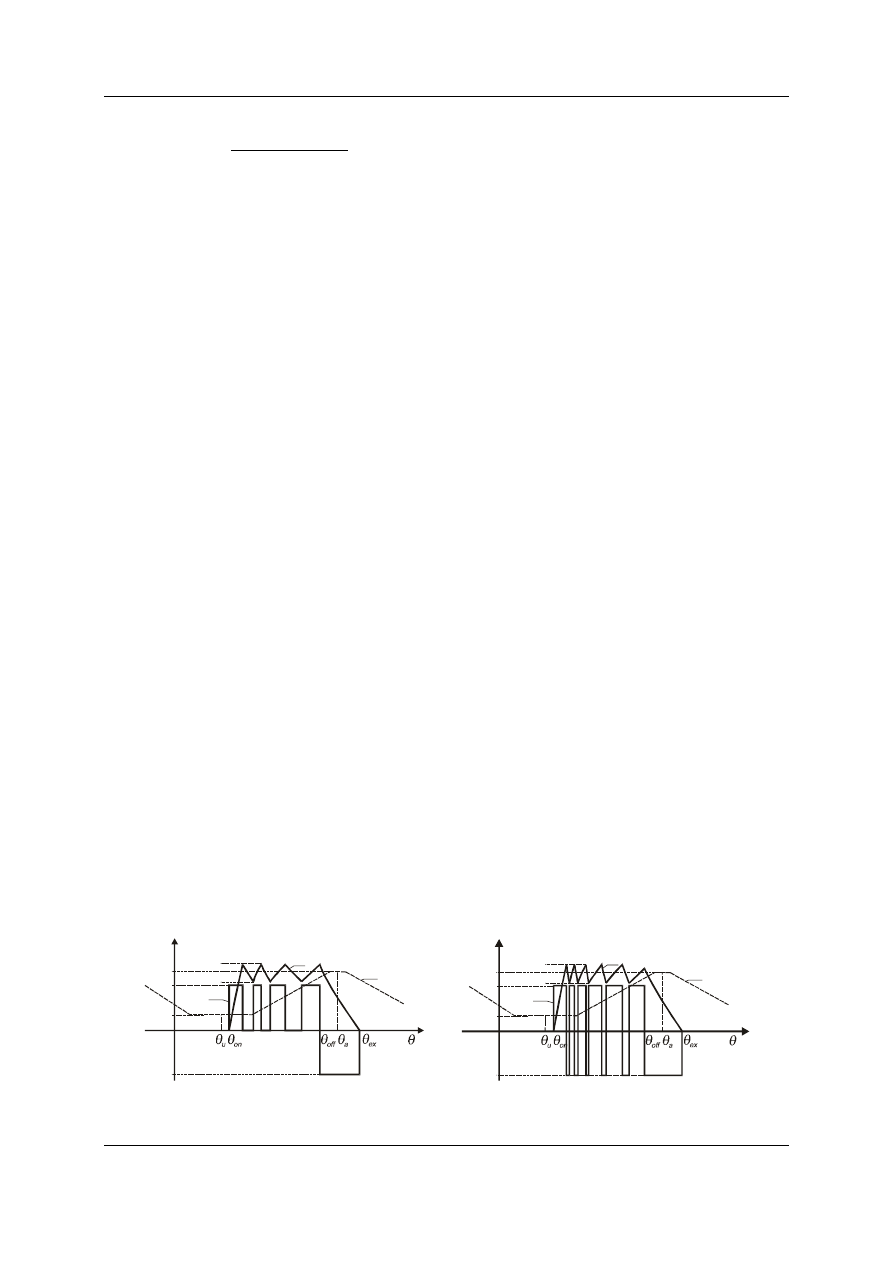
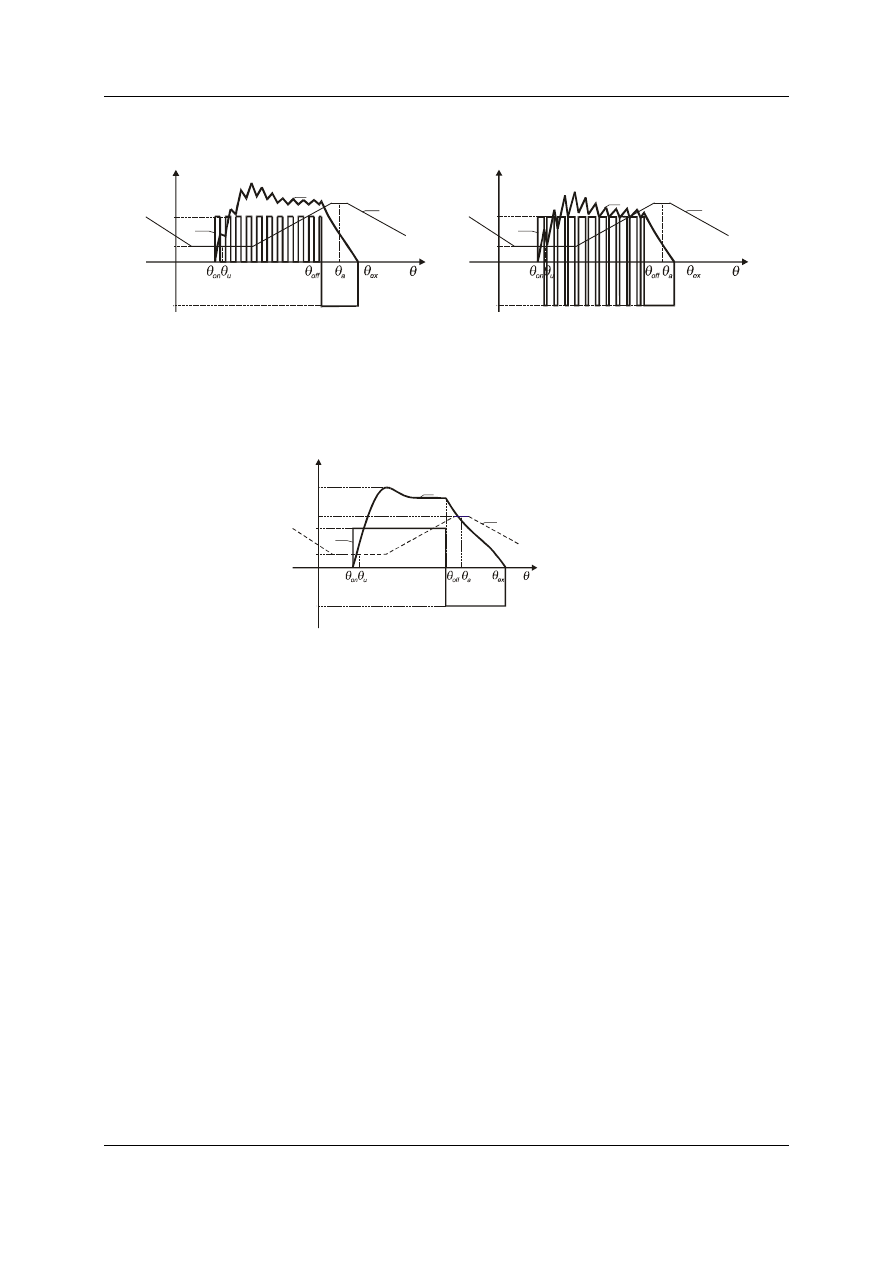
Sterowanie prądowe polega na utrzymywaniu stałej wartości prądu pasmowego w przedziale
zasilania. Przykładowy przebieg prądu pasmowego przedstawiono na rysunku 9.
u
i
L
i, L,u
-U
dc
U
dc
L
a
L
a
i
max
i
min
u
i
i
max
i
min
L
i, L,u
-U
dc
U
dc
L
u
L
a
(a)
(b)
Rys.9. Przebiegi prądu (i) napięcia (u) i indukcyjności (L) podczas sterowania prądowego:
a) z modulacją jednobiegunową, b) z modulacją dwubiegunową
Politechnika Rzeszowska
9
Katedra Elektrodynamiki i Układów Elektromaszynowych
Opracował: dr inż. Piotr Bogusz, dr inż. Mariusz Korkosz - Laboratorium Sterowania
Napędów Elektrycznych
Rzeszów, 5.05.2006/16.02.2007
Sterowanie napięciowe polega na regulacji współczynnika wypełnienia napięcia zasilającego
(PWM) w przedziale zasilania (rys.10).
u
i
L
i, L,u
-U
dc
U
dc
L
u
L
a
u
i
L
i, L,u
-U
dc
U
dc
L
u
L
a
(a)
(b)
Rys.10. Przebiegi prądu (i) napięcia (u) i indukcyjności (L) przy sterowaniu PWM z modulacją:
a) jednobiegunową, b) dwubiegunową
Sterowanie jednopulsowe jest szczególnym przypadkiem sterowania napięciowego przy
współczynniku wypełnienia równym 100%. Regulacja prędkości realizowana jest wyłącznie
poprzez zmianę wartości kątów sterujących
θ
on
i
θ
off
. Przykładowy przebieg prądu
pasmowego dla tego sterowania przedstawiono na rysunku 11.
u
i
L
i
max
i, L, u
-U
dc
U
dc
L
u
L
a
(a)
(b)
Rys.11. Przebiegi prądu (i), napięcia (u) i indukcyjności (L) przy sterowaniu jednopulsowym
Wyszukiwarka
Podobne podstrony:
cwiczenie nr 1 materialy pomocn Nieznany
cwiczenie nr 3 materialy pomocn Nieznany
cwiczenie nr 1 materialy pomocn Nieznany
cwiczenie nr 3 materialy pomocn Nieznany
cwiczenia nr 5 Pan Pietrasinski Nieznany
Cwiczenie nr 8 id 99953 Nieznany
Cwiczenie nr 2 4 id 99899 Nieznany
2012 KAK Materialy pomocnicze I Nieznany
Cwiczenie nr 5 Automatyzacja po Nieznany
Cwiczenie nr 1 id 594720 Nieznany
Cwiczenie Nr 3 id 125025 Nieznany
Cwiczenie nr 3 Wzorcowanie zwez Nieznany
Cwiczenie Nr 2 3 id 125713 Nieznany
Cwiczenia nr 4 zadanie dodatkow Nieznany
Cwiczenie nr 3 id 99908 Nieznany
cwiczenie nr 2 3 id 125714 Nieznany
więcej podobnych podstron